一种双变量模糊PI控制在航空发动机控制中的应用_方中祥
复合模糊控制器在航空发动机上的应用研究
复合模糊控制器在航 空发动机上的应用研 究
张如飞 郭迎清 ( 西北工业大学 动力与能源学院. 西安 7 07 ) 102
Ap l a in s u y o o o i u z o t l ra p id t e o—e gn o t l pi t t d n c mp st f z y c n r l p l o a r — n ie c n r c o e oe e o Z A GR H N u—fi U ig ig(col f ya i ade eg , WP ,X ’n 7 0 7 , hn ) e,G O Y n —qn Sh o o dn m c n n ry N U ia 1 0 2 C ia
1引言
航 空发动机是一个结 构极其复杂 、强 非线性的控制对象,
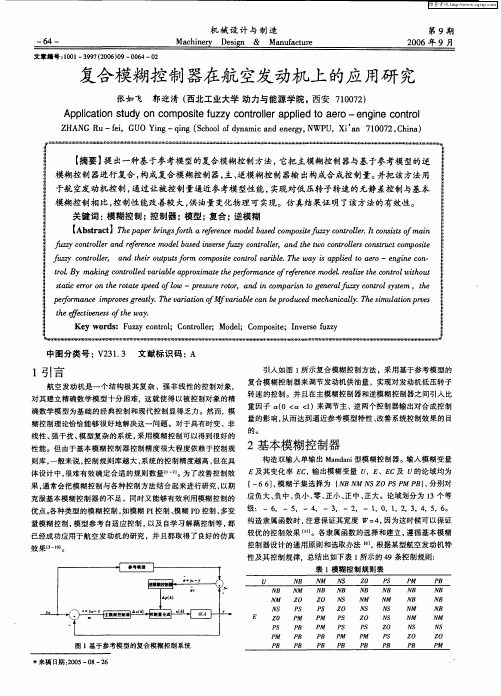
引入 如图 1 所示 复合模糊控制方法 ,采用 基于参考模型 的 复合模糊 控制器来 调节 发动机供油量 。实现对 发动机低压转子 转速 的控制。并且在 主模糊控制器和逆模糊 控制器之 间引入 比 重 因子 ( < < )来调节主 、逆两个控 制器输 出对合成控制 O 1
Ke r s u z o t l C n r l r Mo e ; C mp s e n e s u z y wo d :F z y c n r ; o tol ; o e d l o o i ;I v re f z y t
中图分 类号 : 2 13 文 献标 识码 : V 3 . A
维普资讯
机 械 设 计 与 制 造
一Hale Waihona Puke 第 9期 20 0 6年 9月
6 4一
Ma h n r De i n & Ma u a t r c iev sg n fc u e
文章编号 :0 1— 9 7 20 0 10 3 9 (0 6)9—06 0 4—0 2
基于模糊PI混合控制的自主水下航行器推进系统
・ 5・ 6
基于模 糊 P 混合 控制 的 自主水下航 行器推进 系统 I
郑 勇, 李 宏, 张 群, 丁字汉
707 ) 102 ( 西北工业大学 航海学 院 , 陕西 西安
摘要 : 对转 永磁 无刷 直流 电机 驱动 对转 螺旋 桨 主要应 用在 自主水 下航行 器推 进 系统 中, 过调 节对 转 电 通
Pr p so y t m fAut no o t r Ve il
Ba e n F z y PIM ie n r l s d o u z x d Co t o Z E G Y n , I o gZ A G Q n D N uhn H N o gL n , H N u , I G Y —a H
wh s u e n n e o p oh u e I c n r l t e smu ain i u tae h ti s o d s p ro t n l s o e o tra d i n rl o s b t s d P o t , h i l t l s t d t a t h we u e r y i e s o o l r i i s e d c a g n et rs b l y u d rt ec r u t n e o h c o d t t b e r n ig a d p o e a t a p e h n e a d b t t i t n e i ms c f o k la sa l u n n n r v d t t s e a i h c a s o h ih
( col f r eE gneigN r w s r o tcncl nvrt, ia 10 2 C ia Sh o o i nier , ot et nP l ehia U i syX ’n7 0 7 , hn) Ma n n h e y ei
模糊PI控制的扰动观察法在光伏系统中应用

模糊PI控制的扰动观察法在光伏系统中应用
时国平;钱叶册;孙佐;王良玉
【期刊名称】《浙江水利水电专科学校学报》
【年(卷),期】2017(029)004
【摘要】为了减小外界环境对光伏发电系统的影响,采取最大功率跟踪控制措施.而针对其中的扰动观察法需要解决选择合适步长的问题,提出一种模糊PI控制的扰动观察法.该方法是将扰动观察法能快速接近最大功率点和模糊PI控制能精确的逼近最大功率点的特点结合起来,实现快速准确的跟踪光伏发电系统输出的最大功率点,保证了系统运行的稳定性和能量转换的高效性.通过仿真来验证该控制方法的可行性.
【总页数】4页(P75-78)
【作者】时国平;钱叶册;孙佐;王良玉
【作者单位】池州学院机电工程学院,安徽池州 247000;池州学院机电工程学院,安徽池州 247000;池州学院机电工程学院,安徽池州 247000;庐江泥河红日光伏发电有限公司,安徽合肥 238000
【正文语种】中文
【中图分类】TM615
【相关文献】
1.固定电压法结合扰动观察法在光伏系统MPPT中的应用 [J], 刘晋芳;樊建升
2.基于状态检测的变步长式扰动观察法在光伏系统最大功率跟踪中的应用 [J], 郑
新;付钦学;郭放
3.基于模糊控制和功率预测的变步长扰动观察法在光伏发电系统MPPT控制中的应用 [J], 徐锋
4.模糊PI控制的扰动观察法在光伏系统中应用 [J], 时国平;钱叶册;孙佐;王良玉;;;;
5.基于状态检测的变步长式扰动观察法在光伏系统最大功率跟踪中的应用 [J], 郑新;付钦学;郭放
因版权原因,仅展示原文概要,查看原文内容请购买。
模糊自适应整定PID在航空发动机中的应用研究
制运用现代控制理论在线辨识对象特性参数 , 实时改变其控
( otw s r oy cnc nvri , inS ax 10 2,hn ) N r etn P l ehi U ie t x , h ni 0 7 C ia h e t l a sy a 7
ABS RACT: e t t smp ii , t i n a y a p ia in, I o t l ri s d lr ey i ls i a u o t n T Du ois i l t u i t a d e s p l t cy ly c o P D c nr l su e a g l n c a sc la tma i oe o s se .Ho e e ,te p r r n e o ec n rl rc n n t aif o l ae o l e se u h a i r f e - y t ms w v r h e o ma c f h o t l a o t y c mp i td n n i a s tmss c sar at n f t o e s s c nr y c
l,山 to a s db es ua o . h m lt n eu s ni t ta teds n di e ae ot l r a y eme dW t t y h m lt n T es uao sl dc e t ei e tg tdcn o e s h s ee t i i i i r ti a h h g nr rl h
模糊pi控制在电液速度伺服系统中的应用(精品论文)

模糊PI控制在电液速度伺服系统中的应用作者:胡天明, 方桂笋, 李晨晨, HU Tian-ming, FANG Gui-sun, LI Chen-chen作者单位:胡天明,HU Tian-ming(黑龙江工程学院,黑龙江,哈尔滨,150050), 方桂笋,李晨晨,FANG Gui-sun,LI Chen-chen(兰州理工大学,流体动力与控制学院,甘肃,兰州,730050)刊名:液压与气动英文刊名:CHINESE HYDRAULICS & PNEUMATICS年,卷(期):2008(2)1.郭庆鼎;王成元;周美文直线交流伺服系统的精密控制 20002.Lee M N;Moon J H;Jin KB Robust H control with multiple constraints for the track-following system of an optical disk drive 1998(08)3.潘永平液压伺服系统的模型参考自适应模糊控制新方法[期刊论文]-机床与液压 2007(04)4.党开放基于模型参考模糊自适应的电液位置伺服系统鲁棒控制研究[期刊论文]-机床与液压 2003(04)5.裴福俊液压伺服驱动位置系统的智能控 20021.胡宝军.李富平.胡文海.张彤.Hu Baojun.Li Fuping.Hu Wenhai.Zhang Tong伺服增益对电气刚度的影响分析[期刊论文]-电气传动2007,37(10)2.张昱基于全数字伺服控制单元的运动控制算法的研究[期刊论文]-传动技术2004,18(4)3.段锦良.马俊功.Duan Jinliang.Ma Jungong液压马达速度系统的增益调度控制[期刊论文]-仪器仪表学报2004,25(z3)4.唐铃凤.王雷.Tang Lingfeng.Wang Lei电液力伺服系统的极点配置优化研究[期刊论文]-机械传动2006,30(6)5.马俊功.王世富.王占林.Ma Jungong.Wang Shifu.Wang Zhanlin电液伺服速度系统的模糊增益调度控制[期刊论文]-北京航空航天大学学报2007,33(3)6.陈洪立.翟林培.陈占军.Chen Hongli.Zhai Linpei.Chen Zhanjun伺服系统开环传递函数增益的精确测量[期刊论文]-电子测量技术2008,31(9)7.崔君君.洪荣晶.陈亚林.CUI Junjun.HONG Rongjing.CHEN Yalin数控机床伺服系统速度环的研究[期刊论文]-机床与液压2008,36(3)8.王义明.WANG Yi-ming基于变增益速度前馈的气动位置系统的研究[期刊论文]-液压与气动2009(8)9.刘树道.杨先平基于电液力伺服系统的最优控制方法的研究[期刊论文]-机床与液压2003(5)10.陈思羽.龙泽明数控机床系统增益对进给伺服系统的影响[期刊论文]-机械工程师2008(1)引用本文格式:胡天明.方桂笋.李晨晨.HU Tian-ming.FANG Gui-sun.LI Chen-chen模糊PI控制在电液速度伺服系统中的应用[期刊论文]-液压与气动 2008(2)。
双模糊PI控制器在太阳能MPPT中的应用研究
种重 要 的 发 电 方式 。据 专 家 预 测 ,到 2 4 年 ,全 球 的太 阳 00 能 发 电 量将 占世 界 总发 电量 的 2 % ,2 5 年 后 将成 为世 界 6 00 能源 的支 柱 J 阳 能 系 统在 工作 时 的 电压 随 日照 强 度 、环 。太
图 2 不 同 光 强下 的太 阳 能 电池 的 P V曲线 -
爬 山法 是 一 种 常 见 的 太 阳 能 最 大 功 率 点 跟 踪 算 法 ,它 通
过将 本次太阳能 电池板 的输 出功率和上次 的相 比较来确定增
加 或减 少 太 阳 能 电池 板 工 作 电压 来 实 现 最 大 功 率 点 跟 踪 。如 图3 ,如 果 △ >0,说 明 太 阳 能 电 池板 工 作于 上 坡 段 ,即最 P 大 功 率 点 P的左 侧 , 继 续 增 大 工 作 电压 , 需 从左 边 向 最大 功率 点 靠 近 ;若 △ <0,减 小 工 作 电压 ,从 右 边 向最 大 功率 点 靠 P
流
对 应 的 IV 函数 如下 : — 光 伏 电池 的输 出 特 性 方 程 为 :
I = IL— id— I
G:太 阳辐 射 强 度
唧
() 1
[
( 8)
,
{[ c皿)) e 一 + ]
, = c )  ̄pq o()n r 一 ) 0 ) ( / x [v c / k 1 1 ( ( ]
三 、模 糊 控 制
模 糊控 制是以模糊理论为基础 的一种新兴 的控制方法 , 它 是模 糊集合理论和 自动控制技术相结合 的产物 。模 糊控制 器 能对 那些时变的、非线性 ,无法获得精确 的数 学模 型的复 杂 系统 给出有效 的控制 ,因而得到迅速 的发展 。光伏 发 电系 统 正是这样 一个强非线性系统 ,因此采 用模糊控 制的方法来 进 行 太 阳 电池 的最 大 功 率 点 跟 踪 是 较 为 合 适 的 -。根 据 图 3 7 l
模糊PI在汽车用爪极发电机控制系统的应用研究
【 ywod 】 zy P ot lca Ke r sf z- I nr ;lw—pl e eao;ot l ytm u c o oegnrtrcnr s os e
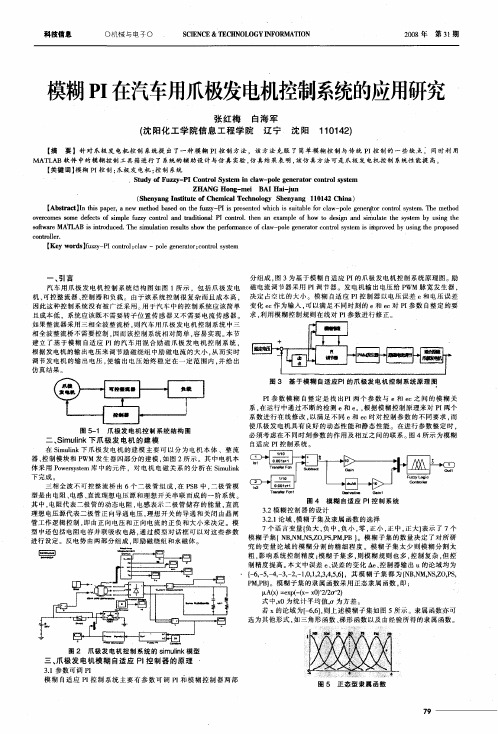
引 言 分组 成 , 3为 基 于 模 糊 自适 应 P 的爪 极 发 电机 控 制 系统 原 理 图 。 图 I 励 WM 脉宽 发 生 器 , 汽 车 用 爪 极 发 电机 控 制 系 统 结 构 图 如 图 l所 示 .包 括 爪 极 发 电 磁 电流 调 节 器 采 用 H 调 节 器 。 发 电机 输 出 电压 给 P I 机 、 整 流 器 、 制 器 和 负 载 。 由于 该 系 统 控 制 很 复 杂 而 且 成 本 高 , 决定 占 空 比 的 大 小 。 模 糊 自适 应 P 控 制 器 以 电 压 误 差 e和 电压 误 差 可控 控 c作 可 e I 因 此 这种 控 制 系 统 没 有被 广泛 采 用 。 于 汽 车 中 的 控 制 系统 应 该 简 单 变化 e 为 输 入 , 以 满 足 不 同时 刻 的 e和 e 对 P 参 数 自整 定 的要 用 利 1 且 成 本 低 ,系 统 应 该 既不 需 要 转 子 位 置 传 感 器 又 不 需 要 电流 传 感 器 。 求 , 用 模 糊 控 制 规 则 在 线对 P 参 数 进 行 修 正 。
s fw r ot a e MAT LAB i n r d c d 1 1 i lto e u t h w h e f r n e o lw— oe g n r t rc n r ls se i  ̄p o e y u i g t e p o o e s i to u e . 1e smu a in r s lss o t e p ro ma c c a p l e e ao o to y tm s i r v b sn h r p s d f d c nt l r o rl. oe
基于模糊PI混合控制的自主水下航行器推进系统
基于模糊PI混合控制的自主水下航行器推进系统
郑勇;李宏;张群;丁宇汉
【期刊名称】《测控技术》
【年(卷),期】2011(030)011
【摘要】对转永磁无刷直流电机驱动对转螺旋桨主要应用在自主水下航行器推进系统中,通过调节对转电机转速就可以实现自主水下航行器速度的无级调节.在研究对转永磁无刷直流电机数学模型的基础上,提出一种外环转速环采用模糊PI混合控制,内环电流环采用PI控制的双闭环调速方法.仿真结果表明,与外环、内环均采用PI控制的双闭环调速方法相比,该方法在稳定运行突加负载的情况下,具有转速变化小,稳定性好的优点,取得了较好的控制效果.
【总页数】3页(P65-67)
【作者】郑勇;李宏;张群;丁宇汉
【作者单位】西北工业大学航海学院,陕西西安710072;西北工业大学航海学院,陕西西安710072;西北工业大学航海学院,陕西西安710072;西北工业大学航海学院,陕西西安710072
【正文语种】中文
【中图分类】TM301.2
【相关文献】
1.神经模糊PID混合控制在双闭环恒压供水系统中的应用 [J], 谢静;范力旻
2.模糊PID混合控制系统在烧结竖炉中的应用 [J], 陈然;奚文萍
3.基于神经模糊PID混合控制的恒压供水系统硬件设计 [J], 谢静;杜红艳;赵瑞林;范力旻
4.变频恒压供水系统模糊PID混合控制策略研究 [J], 张静;李茂军;袁卓异;尹超
5.模糊PID混合控制系统在加热炉中的应用 [J], 郭建波;周剑利;崔涛
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采用文献 [ 5 ]提出的多维模糊条件分解方法 ,将模糊关系矩阵 R 分解为 4个小模糊关系
矩阵 R11 , R21 , R12 , R22 ,得到的航空发动机模糊控制器的模糊关系方程为:
△ Mf = EN L R11 ∩ E T*4 R21 , △ AC = EN L R12 ∩ E T*4 R22
( 5)
∑ U△ Mf ( j) j= 1
∑ U△ AC( j ) j= 1
式中△ Mf ( j )及△ AC ( j )表示论域的元数 , U△ Mf ( j)及 U△ AC( j )表示对应元素的隶属度。
第 1 期
一种双变量模糊 PI控制在航空发动机控制中的应用*
43
模糊 PI部分的算法如下:
图 4 输入△ N L= 0 r / min,△ T*4 = 50 K
44
航空动力学报
第 13 卷
有抖动现象是模糊控制量的最小论域等级比较大 ,比例因子等参数和控制规则为次优 ,未达到
图 5 输入△ N L = 500 r / mi n,△ T*4 = 50 K
图 6 输入△ N L= 500 r / min,△ T*4 = 50 K
M an and Cybernetics, 1986, 16( 5)
(责任编辑 魏星禄 )
No. 1
Abs t racts
107
APPLICATION OF TWO- VARIABLE FUZZY PI CON TROL TO AEROENGINE CONTROL
Fang Zhongxiang, Huang Wanwei, Li Huacong, Wu Qihua, Zhang Jiazhen, Chen Fuqun
1. 2秒 (地面最大状态的 ) ,说明具有满意的响应特
性 ; 图 3和图 4表明系统具有静态解耦特性 ,消除了 发动机双变量耦合的影响。 图 3中 T*4 仿真曲线具
图 2 输入△ N L = 500 r / mi n,△ T*4 = 50 K
图 3 输入△ N L = 500 r / mi n,△ T*4 = 0 K
DOI : 10. 13224 /j . cnki . jasp. 1998. 01. 010
第 13卷 第 1期
1998 年
1月
航空动力学报
Journal of Aerospace Power
V ol. 13 No. 1 Ja n. 1997
一种双变量模糊 PI控制 在航空发动机控制中的应用*
论域
NB NM NS
Z PS PM PB
-7 -6 -5 -4 -3 - 2 - 1 0
1
2
3
4
5
6
7
1. 0 0. 8 0. 5 0. 3 0. 1 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 5 0. 8 1. 0 0. 8 0. 5 0. 3 0. 1 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 1 0. 3 0. 5 0. 8 1. 0 0. 8 0. 5 0. 3 0. 1 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 1 0. 3 0. 5 0. 8 1. 0 0. 8 0. 5 0. 3 0. 1 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 1 0. 3 0. 5 0. 8 1. 0 0. 8 0. 5 0. 3 0. 1 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 1 0. 3 0. 5 0. 8 1. 0 0. 8 0. 5 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 0 0. 1 0. 3 0. 5 0. 8 1. 0
N M AN D △ AC (i ) =
PS
IF EN L ( 49) = PB AN D E T*4( 49) = PB T HEN △ Mf ( 49) = PB AN D △ AC ( 49) = N M ( 1)
2. 2 模糊控制算法设计
双变量模糊 PI算法分为两部分 ,即模糊推理算法部分和 PI算法部分。 式 ( 1)表示的模糊
关系矩阵为:
49
R=∪
{ EN
L(i ) E
T* 4(i
) △
Mf
(i ) △
AC( i)
}
( 2)
i= 1
R 为 R= q1× q2× q3× q4 维模糊关系矩阵 , q1 , q2 , q3 , q4 分别为模糊变量 EN L , ET*4 ,△ Mf ,△ Ac
的论域等级 ,模糊关系方程为: Y = EN L· E T*4 · R
( 3)
模糊关系矩阵 R11 , R21 , R12 , R22离线计算 ,得到的模糊关系矩阵 R11 , R21 , R12 , R22均为 15×
15的矩阵 ,其元素为不大于 1的实数。根据式 ( 3)在线推理计算得到模糊控制量△ Mf 和△ AC。
分解模糊关系矩阵 R11 , R21 , R12 , R22采用如下算法计算:
最优化 ,图 6超调量偏大是该状态的参数与设计点的参数相差太大 ,控制系统的模糊控制规则 不够多 ,未能完全反应这些变化对超调量的影响 ,另外的文章专门探讨这些。
4 结 论
研究表明模糊推理双变量模糊 PI控制器具有较好的静态解耦特性和满意的响应特性 ,说 明这种航空发动机模糊控制器的结构合理、可行 ,它用于航空发动机控制系统中能够满足跟踪 输入信号和响应特性的要求 ,在航空发动机控制中有着美好的应用前景。 当然 ,航空发动机多 变量模糊控制研究还是刚刚起步 ,还有许多问题有待研究。
1997年 1月收稿 ; 1997年 3月收到修改稿。 * 本文系国家自然科学基金 (编号: 59076290)和航空基金 (编号: 90C53021)资助项目 * * 男 35岁 博士 工程师 西安市西北工业大学 709教研室 710072
42
航空动力学报
第 13 卷
表 1 模糊变量的状态表
根据某型航空发动机特性及其控制规律 ,总结出如下 49条控制规则: IF EN L( 1) = N B AN D E T*4( 1) = PB T HEN △ Mf ( 1) = N B AN D △ AC ( 1) = PB
IF ENL( i) =
PS
AN D
E
T* 4(i
)
=
N M T HEN △ Mf (i) =
i= 1
模糊控制量△ Mf 和△ AC 采用加权平均法 ,选取模糊控制量的隶属度为权函数进行模糊
决策 ,求得精确控制量△mf 和△ Ae ,算法为:
15
15
∑△ Mf ( j ) U△ Mf ( j)
∑△ Ac ( j ) U△ Ac( j)
△mf = j= 1 15
△ Ae = j= 1 15
∫ ∫ t
t
Umf = C11 △m f dt + C12 △m f , UAe = C21 △ Ae dt + C22 △ Ae ( 6)
0
0
计算出的 Umf和 UAe即为模糊 PI控制器的输入的精确控制量。算法中的系数 C11 , C12 , C21 ,
C22现场调试确定。
3 闭环模糊控制系统设计及 仿真
2 双输入模糊推理双变量模糊 PI控制研究
选用供油量控制低压转子转速为常数 ,尾喷口面积控制涡轮后温度为常数 ,即: △ Mf → N L = CO N ST △ AC → T*4 = CON ST
的控制规律 ,探索航空发动机采用模糊控制的规律。 2. 1 模糊控制规则的设计
将模糊变量 EN L , E T*4 ,△ Mf ,△ AC 分为 7个语言值 ,即 N B, N M , N S, Z, P S, PM , PB,论 域划分为 15个等级: - 7, - 6, - 5, - 4, - 3, - 2, - 1, 0, 1, 2, 3, 4, 5, 6, 7。各模糊变量的状态表 如表 1,模糊控制器依据模糊控制规则查询各模糊变量的状态表 ,并根据模糊推理算法进行推 理计算模糊控制量。
西北工业大学 方中祥* * 黄万伟 张嘉桢 吴琪华 陈辅群
【摘要】 针对某型 航空发动机的性能 控制 ,提出了 一种双变量模糊 P I控制算法 ,构造了双变量模 糊 PI 控制器 ,研究它在 航空发动机 控制中的 应用 ,探 索航空发 动机采用双 变量模糊 控制的 规律 , 为航空发动机控制探索了一种新方法。
线内 ,选取大量状态点进行计算机仿真研究 ,部分仿
真曲线如图 2~ 6所示 ,图中曲线 B 为低压转子转
速响应曲线 , C为低压转子转速响应曲线。图 2、图 5
和图 6表明虽然飞行包线内不同状态的参数差别很
大 ,但是控制系统能够满意地跟踪输入信号 ,达到要
求的 稳态控制 精度 ,低 压转子 转速的 调节时 间为
49
49
R11 = ∪ { EN L(i ) ∩ △ Mf ( i) } R12 = ∪ {EN L(i ) ∩ △ AC (i ) }
i= 1
i= 1
49
Hale Waihona Puke 49R21 = ∪
{
E
T* 4(i
)
∩
△ Mf ( i) } R22 = ∪
{E
T* 4(i
)
∩
△ AC (i) }
( 4)
i= 1
根据已设计的参数、模糊推理算法 和选定的控制规律 ,设计的控制系统如 图 1。 模糊推理双变量模糊 PI控制器以 被控量低压转子转速的增量△ N L 及涡 轮后温度的增量△ T*4 的误差为控制器 的输入 ,以控制量供油量 Umf 及尾喷口 面积 UAe为模糊 PI控制器的输出。