基于Qt_Embedded的伺服测试平台软件的研究与设计
基于Qt_Embedded嵌入式控制界面的设计
陈
曦等. 基于 Qt / Embedded 嵌入式控制界面的设计
1131
基于 Qt / Embedded 嵌入式控制界面的设计
陈 曦 刘增强
( 河北工业大学控制科学与工程学院, 天津 300130 )
摘
要
介绍了一种基于嵌入式 Linux 操作系统的小型通用智能控制器的图形用户界面的设计, 着重 嵌入式 Linux TP311. 5 ARM9 Qt / Embedded A 智能控制器 文章编号 嵌入式 GUI 10003932 ( 2011 ) 09113103
[6 ]
图2
Qt / Embedded 开发流程
制是由子类化的 QGraphicsPolygonItem 来完成实 现; 工作区通过 QGraphicsScene 的子类化来完成, 利用 Qt 所特有的信号和槽机制来实现响应相应 的鼠标事件等。 进入主窗口可以看到工具栏、 菜 单栏及工作区等, 从功能上可分为 3 个单元: 数据 处理单元、 数据显示单元和数据传输单元。 数据 逻辑模块和控 处理单元包括 3 个模块: 算数模块、 制模块, 其中算数模块用于实现数据运算, 包括 加、 减、 乘、 除等数据运算; 逻辑模块用于实现与、 或、 非、 异或等逻辑控制功能; 控制模块用于实现 PID 算法控制功能。用户可以将控制模块进行组 态配置, 完成数据运算、 数据比较及控制算法等复 杂的控制功能。 数据显示单元主控制器将采集、 控制的数据都存储在 SQLite 数据库中, 该单元通 可以实时显示各个通道的 过调用数据库的数据, 运行情况、 控制方法及数据变化等, 同时也可以查 方便用户对现场的分析。 数据传输 看历史数据, 即 GPRS 模块, 单元主要是完成数据的无线发送, 该模块是将处理后的数据或历史记录发送至上位 机或者服务器, 可以实现用户的远程在线实时访 问, 从而可以使该控制器做到无人值守。 在控制 有相应的功能供用户选择, 同时可以对模 界面中, 块进行参数设置, 完成数据的发送与接收功能。 用户界面运行如图 3 所示。
《基于QT-Embedded嵌入式数据采集系统》范文
《基于QT-Embedded嵌入式数据采集系统》篇一基于QT-Embedded嵌入式数据采集系统一、引言随着物联网技术的快速发展,嵌入式系统在各行各业的应用越来越广泛。
数据采集作为嵌入式系统中的重要一环,对于实现系统的高效、稳定运行具有重要意义。
QT/Embedded作为一种强大的嵌入式系统开发工具,其在数据采集系统中的应用,能够有效地提高系统的性能和用户体验。
本文将重点探讨基于QT/Embedded的嵌入式数据采集系统的设计、实现及优化。
二、系统设计1. 硬件设计硬件部分主要包括嵌入式处理器、传感器、通信模块等。
嵌入式处理器是整个系统的核心,负责运行QT/Embedded操作系统和应用程序。
传感器负责采集各种数据,如温度、湿度、压力等。
通信模块用于将采集到的数据传输到上位机或云端。
2. 软件设计软件部分主要包括QT/Embedded操作系统、数据采集程序、数据处理程序等。
QT/Embedded操作系统负责管理硬件资源,提供友好的用户界面。
数据采集程序负责从传感器中读取数据,并将其传输到数据处理程序。
数据处理程序负责对采集到的数据进行处理、分析和存储。
三、系统实现1. 开发环境搭建首先需要搭建QT/Embedded的开发环境,包括安装QT/Embedded操作系统、编译器、调试器等。
然后,根据系统需求,编写数据采集程序和数据处理程序。
2. 数据采集数据采集是整个系统的关键环节。
通过传感器采集各种数据,如温度、湿度、压力等。
为了提高数据的准确性和实时性,需要采用高精度的传感器和合适的采样频率。
同时,还需要对传感器进行校准和补偿,以消除误差和干扰。
3. 数据处理与存储数据处理程序负责对采集到的数据进行处理、分析和存储。
可以对数据进行滤波、平滑、压缩等处理,以提高数据的可用性和可靠性。
同时,还需要将处理后的数据存储到本地或云端,以便后续分析和使用。
四、系统优化1. 性能优化为了提高系统的性能和响应速度,需要对系统进行优化。
《基于QT-Embedded嵌入式数据采集系统》范文
《基于QT-Embedded嵌入式数据采集系统》篇一基于QT-Embedded嵌入式数据采集系统一、引言随着科技的不断发展,嵌入式系统在各个领域的应用越来越广泛。
其中,基于QT/Embedded的嵌入式数据采集系统以其强大的功能、友好的界面以及高效的性能,受到了广泛关注。
本文将详细介绍基于QT/Embedded嵌入式数据采集系统的设计、实现及其应用,并探讨其高质量的实现方法和优势。
二、QT/Embedded嵌入式数据采集系统概述QT/Embedded是一种用于嵌入式系统的C++图形界面开发工具包,具有跨平台、高效率、易扩展等优点。
基于QT/Embedded 的嵌入式数据采集系统,可以实现对各种传感器数据的实时采集、传输、处理和存储。
系统采用模块化设计,具有良好的可扩展性和可维护性。
三、系统设计1. 硬件设计:系统硬件包括传感器、微处理器、存储器等部分。
传感器负责采集数据,微处理器对数据进行处理,存储器用于存储数据。
硬件设计应考虑到系统的实时性、稳定性和功耗等因素。
2. 软件设计:软件设计包括操作系统、QT/Embedded开发环境以及应用程序设计。
操作系统采用嵌入式Linux,QT/Embedded用于开发界面和应用程序,实现数据的采集、传输、处理和存储等功能。
四、系统实现1. 数据采集:系统通过传感器实时采集各种数据,如温度、湿度、压力等。
数据采集应具有高精度、实时性和可靠性。
2. 数据传输:采集到的数据通过串口、网络等方式传输到微处理器。
传输过程中应保证数据的完整性和安全性。
3. 数据处理:微处理器对接收到的数据进行处理,如滤波、标定、计算等。
处理后的数据可进行存储或通过QT/Embedded界面进行显示。
4. 数据存储:处理后的数据可存储在本地存储器或云端服务器中,以便后续分析和应用。
五、系统优势及应用1. 高质量界面:基于QT/Embedded的界面具有友好的用户交互体验,可实现数据的实时显示和监控。
嵌入式Linux系统Qt_Embedded的GUI开发研究

嵌入式Linux系统Qt/Embedded的GUI开发研究发布时间:2021-08-10T09:27:51.457Z 来源:《中国电气工程学报》2021年第六卷3期作者:李大伟[导读] 本文主要介绍了在嵌入式Linux系统下Qt/Embedded的GUI开发流程李大伟珠海格力电器股份有限公司519070摘要:本文主要介绍了在嵌入式Linux系统下Qt/Embedded的GUI开发流程,通过对Qt/Embedded显示原理和机制的介绍及分析建立linux 系统下TI公司Cortex-A8内核芯片AM335X的Qt/Embedded开发环境,并对嵌入式Linux系统下Qt/Embedded的图形用户界面编程方法进行介绍。
关键词:嵌入式Linux、Qt/Embedded引言 Qt/Embedded是针对嵌入式开发环境进行设计的,因其取代Qt桌面系统开发中的Xserver、XLibara将其功能整合在一起,不需底层库支持提高了开发效率,并对嵌入式环境开发了模块化的窗口设计、以及源代码开放得到广泛应用,目前市面上上市的Linux PDA大都采用Qt作为图形接口的函数库。
Qt/Embedded的特性是可以直接在 Framebuffer上显示图形,反应速度快,这对硬件与容量都有限制的嵌入式环境来说非常重要。
1.硬件平台使用ARM Cortex-A8内核的AM3354处理器,该处理器定位为工业控制MCU,性价比高且运算能力强大,支持2D/3D图像引擎,集成LCD及触摸控制,在工业控制、智能交通等恶劣场合广泛应用。
硬件平台外部使用24MHz晶振,CPU内部倍频至800MHz,512MB的SDRAM,4G的MMC,配备1个USB,1个10M以太网,2个CAN,2个UART,1个SPI和2个I2C接口。
2.Qt/Embedded体系结构Qt/Embedded的软件体系结构自上而下可分为三层:1)上层控件层:Qt库提供给用户直接使用的GUI控件,通过Qt Creator工具可便捷开发基于widget的GUI图形界面应用程序。
基于Qt Embedded的伺服测试平台软件的研究与设计

基于Qt/ Embedded的伺服测试平台软件的研究与设计摘要:针对伺服系统的性能测试问题,分析了伺服系统的工作原理与性能参数指标,研究了伺服测试原理,并在此基础上设计了通用伺服测试平台的物理结构和逻辑结构。
根据该结构以及伺服系统的测试要求,进行了软硬件层次的划分,并确定了软件的设计目标,以及软件的主要模块功能。
通过对软件开发平台的比较,选择了Linux操作系统以及Qt/Embedded开发库。
详细介绍了伺服测试平台软件的数据流图和控制流图,伺服测试平台的测试过程及其基于Qt/Embedded的伺服测试平台的软件实现问题。
关键词:伺服测试;伺服系统;Qt/Embedded0引言在现代数控加工系统中,伺服系统无疑是很重要的,它的好坏直接决定着数控系统加工工件质量的好坏。
目前数控加工一般由NC控制系统、伺服驱动系统和反馈检测系统三部分组成。
数控机床对伺服系统性能要求包括:定位速度和轮廓切削进给速度;定位精度和轮廓切削精度;精加工的表面粗糙度;在外界干扰下的稳定性。
这些要求主要取决于伺服系统的静态、动态特性。
国内外很多公司都十分注重伺服系统的研发。
高质量的伺服系统也一直是用户的追求。
但伺服系统性能检测设备的匮乏,使得伺服系统的研发变得很困难,不仅研发周期长,而且其性能也无法保证。
因此,伺服系统性能检测设备的研发显得尤为必要。
正是基于这样的迫切需求,我们研发了伺服测试平台。
它是一种伺服系统性能的检测设备,为伺服系统的研发者、也为伺服用户检测伺服系统性能提供一个可靠的工具。
1Qt/Embedded 简介Qt/Embedded是基于Qt的嵌入式GUI和应用程序开发的工具包,它可运行在多种嵌入式设备上,主要运行在嵌入式Linux系统上,并且需要C++编译器的支持,并为嵌入式应用程序提供Qt的标准API。
Qt/Embedded 的API是基于面向对象技术的。
在应用程序开发上使用与Qt相同的工具包,只需在目标嵌入式平台上重新编译即可。
基于Qt/Embedded的伺服测试平台软件的研究与设计
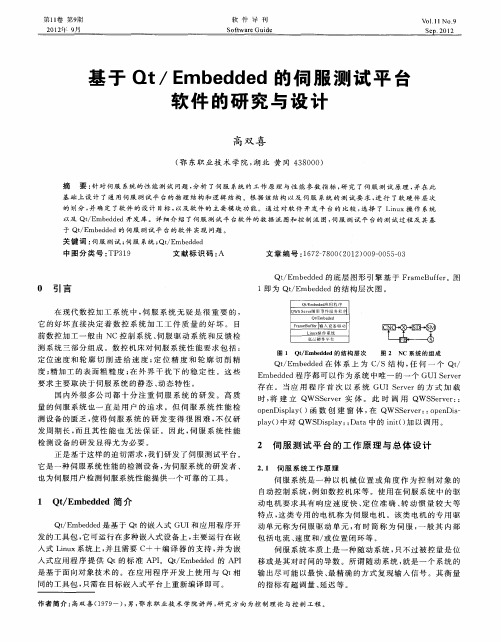
图 1 QtE e d d的结 构 层 次 / mb d e
图 2 N 系统 的 组成 C
定 位 速度 和 轮 廓 切 削 进 给 速 度 ; 位 精 度 和 轮 廓 切 削 精 定 度 ; 加 工 的表 面 粗 糙 度 ; 外 界 干 扰 下 的稳 定 性 。 这 些 精 在
伺 服 系统 是 一 种 以机 械 位 置 或 角 度 作 为 控 制 对 象 的 自动 控 制 系 统 , 如 数 控 机 床 等 。使 用 在 伺 服 系 统 中 的 驱 例 动 电 机 要求 具有 响 应 速 度 快 、 位 准 确 、 动 惯 量 较 大 等 定 转
特点 , 这类 专 用 的 电机 称 为 伺 服 电机 。该 类 电 机 的专 用 驱 动单 元 称 为伺 服 驱 动 单 元 , 时 简 称 为 伺 服 , 般 其 内 部 有 一
第 1卷 第9 l 期
2 2F9 O1 f 月
VO】l 1NO. 9 Sel O1 l 2 2
基 于 Qt m d /E b d d的伺 服 测 试 平 台 e e 软 件 的 研 究 与 设 计
高 双喜
( 东职业技 术 学院 , 北 黄 冈 4 80 ) 鄂 湖 3 0 0
Q e ell wsS v r 形事件 服务聃  ̄ J
0t mb d d / E ee
Fa e u e l r B f r输入设备 m
Ln x 作 系统 iu 操
底 碗 件 半 台
f
前数 控 加 工 一 般 由 N C控 制 系 统 、 服 驱 动 系 统 和反 馈 检 伺
0 引 言
在 现代 数 控 加 工 系统 中 , 服 系 统 无 疑 是 很 重 要 的 , 伺 它 的 好 坏直 接决 定 着 数 控 系 统 加 工 工 件 质 量 的好 坏 。 目
《基于QT-Embedded嵌入式数据采集系统》范文
《基于QT-Embedded嵌入式数据采集系统》篇一基于QT-Embedded嵌入式数据采集系统一、引言随着科技的不断发展,嵌入式系统在各个领域的应用越来越广泛。
其中,基于QT/Embedded的嵌入式数据采集系统因其高效、稳定、易用等特点,在工业控制、智能家居、医疗设备等领域得到了广泛应用。
本文将详细介绍基于QT/Embedded嵌入式数据采集系统的设计与实现,探讨其在实际应用中的优势与挑战。
二、QT/Embedded技术概述QT/Embedded是一种基于QT的嵌入式应用程序开发框架,它提供了丰富的GUI组件和强大的跨平台开发能力。
QT/Embedded具有以下特点:1. 跨平台性:支持多种操作系统和硬件平台,便于开发人员在不同环境下进行开发。
2. 丰富的GUI组件:提供了大量的GUI组件,如按钮、滑动条、列表框等,方便开发者快速构建用户界面。
3. 强大的网络支持:支持TCP/IP、UDP等网络协议,便于实现远程数据采集与控制。
4. 良好的扩展性:支持C++、Python等多种编程语言,便于开发者根据需求进行定制化开发。
三、系统设计基于QT/Embedded的嵌入式数据采集系统设计主要包括硬件设计和软件设计两部分。
1. 硬件设计:主要包括处理器、内存、存储器、传感器等硬件设备的选择与配置。
处理器应具备较高的运算能力和较低的功耗,内存和存储器应满足系统运行和数据存储的需求,传感器应具备高精度、高稳定性的特点。
2. 软件设计:主要包括操作系统、QT/Embedded开发环境、数据采集与处理程序等。
操作系统应具备高稳定性和低功耗的特点,QT/Embedded开发环境应提供丰富的GUI组件和强大的跨平台开发能力,数据采集与处理程序应具备高效、准确的数据处理能力。
四、系统实现基于QT/Embedded的嵌入式数据采集系统实现主要包括以下几个步骤:1. 硬件设备连接与配置:将传感器等硬件设备与处理器连接,并进行相关配置。
基于QT平台的雷达伺服调试系统

基于Q T 平台的雷达伺服调试系统宣 翔1,刘 悦2(1.中国电子科技集团公司第三十八研究所,安徽合肥230088;2.长鑫存储技术有限公司,安徽合肥230601)摘要:针对雷达伺服调试时控制指令给定复杂㊁信号反馈显示不够直观等现状,设计了一套适用性较强㊁操作简易的调试系统㊂首先在Q T 平台下通过图形化编程,完成串口调试㊁总线调试的界面设计,随后编译形成源代码,通过在源代码中增加硬件驱动接口,完成界面与硬件接口的连接㊂经与可编辑逻辑控制器(P L C )㊁电机驱动器联调测试验证,该调试系统运行状态良好,人机操作简单,且信息反馈直观,极大方便了伺服人员的调试工作㊂关键词:Q T 平台;伺服调试系统;总线通信;串口通信中图分类号:T N 95;T P 13 文献标识码:A 文章编号:C N 32-1413(2021)02-0100-04D O I :10.16426/j .c n k i .jc d z d k .2021.02.021R a d a r S e r v o D e b u g g i n g S ys t e m B a s e d o n Q T P l a t f o r m X U A N X i a n g 1,L I U Y u e 2(1.T h e 38t h R e s e a r c h I n s t i t u t e o f C E T C ,H e f e i 230088,C h i n a;2.C h a n g x i n S t o r a g e T e c h n o l o g y Co .,L t d ,H e f e i 230601,C h i n a )A b s t r a c t :I n t h i s p a p e r ,a d e b u g g i n g s y s t e m w i t h s t r o n g a d a p t a b i l i t y a n d e a s y o p e r a t i o n i s d e s i gn e d i n v i e w o f t h e c o m p l i c a t e d c o n t r o l i n s t r u c t i o n s g i v e n a n d t h e u n i n t u i t i v e s i g n a l f e e d b a c k d u r i n g ra -d a r s e r v o d eb u g g i n g .F i r s t ,t h e i n t e r f ac ede s i g n of s e r i a l p o r t d e b ug g i n g a n d b u s d e b u g g i n g is d e -s i g n e d t h r o u g h g r a p h i c a l p r o g r a mm i n g o n Q T p l a t f o r m.T h e n ,t h e s o u r c e c o d e i s c o m pi l e d a n d f o r m e d ,a n d t h e c o n n e c t i o n i s c o m p l e t e d b e t w e e n t h e i n t e r f a c e a n d h a r d w a r e i n t e r f a c e b y a d d i n g ah a r d w a r e d r i v e r i n t e r f a c e i n s o u r c e c o d e .A s s o c i a t e d t r a i l s w i t h p r o g r a mm i n g l o gi c c o n t r o l l e r (P L C )a n d m o t o r d r i v e r v e r i f i e s t h a t t h i s d e b u g g i n g s y s t e m i s r u n n i n g we l l ,a n d h a s c h a r a c t e r i s t i c s of s i m p l e m a n -m a c h i n e o p e r a t i o n a n d i n t u i t i v e f e e d b a c k ,w h i c hg r e a t l y f a c i l i t a t e s th e d e b u g gi n g of s e r v o e ng i n e e r s .K e y wo r d s :Q T p l a t f o r m ;s e r v o d e b u g g i n g s y s t e m ;b u s c o mm u n i c a t i o n ;s e r i a l c o mm u n i c a t i o n 收稿日期:202011130 引 言随着现代雷达指标的不断提升,雷达伺服系统朝着高精度㊁高响应方向不断发展,伺服系统性能的提升不仅对伺服系统配套的电气元件性能提出更高的要求,也对系统调试发起了更大的挑战㊂传统的雷达伺服调试由于缺乏人机交互界面,调试过程中更多依赖于工程人员的项目经验和对电气元件的理解从而给出输出变量,且被控元件相应的反馈信号只能依赖于工程人员通过控制软件中的数据记录分析以及通过示波器在通信端点完成曲线记录㊂基于传统雷达伺服调试过程中操作复杂㊁变量给定模糊不清且状态反馈显示困难等状况,本文设计开发的一种针对雷达伺服调试的系统,通过控制器局域网络(C A N )总线㊁串口通信等多种方式与外部元件进行信息交互,绘制实时动态曲线图记录电机转速㊁电流等状态信息,且在测试过程中实时编辑控制指令并发送㊂1 伺服调试系统界面结构用户界面是否美观以及易操作是衡量一个U I界面友好与否的重要标准,用户界面部分作为本系2021年4月舰船电子对抗A pr .2021第44卷第2期S H I P B O A R D E L E C T R O N I C C O U N T E R M E A S U R EV o l .44N o .2统重要的组成部分,布局和设计均基于以上两点完成㊂Q T 平台作为当今界面设计时常用的软件平台,其采用的C ++编程语言作为内核语言,设计人员在编程时可以实时进行效果仿真和调试㊂同时,该平台包含多种实用的外部库,设计人员通过库的调用即可实现与计算机和驱动之间的互连,并实现向程序添加图片㊁多媒体等功能,操作简单㊂本系统基于Q T 平台在界面开发时的以上优势,采用该平台完成用户界面的设计㊂本系统界面设计结构主要包括如图1所示的部分,主页面下包括测试模式和实验模式2种模式,测试模式主要包括用于显示数字信号输入输出状态的点灯模块,曲线绘制模块主要显示如电流㊁电压㊁速度等实时连续变化的变量用以记录,而串口㊁C A N 通信模块则用于与外部元件实时通信,获取对方状态并下达相应指令㊂实验模式下参数调整模块用于改变用户的自定义参数,并通过指令下达模块下达相应的指令㊂图1 界面整体构造图2 界面显示设计2.1 信号与槽机制信号与槽机制作为Q T 平台的核心机制,它的本质是一种用于对象之间通信的机制,当对象改变其状态时,信号就由该对象发射出去,槽用于接收信号,并在收到信号后立即执行相应的成员函数,信号与槽取代了函数指针,使得通信程序的编写变得更加简洁明了㊂其中,信号与槽之间的关系可以描述为:多个信号可以连接到1个槽,1个信号可以连接到多个槽,图2展示了信号与槽之间的关系㊂Q T 中标准的信号与槽格式为:c o n n e c t (O b j e c t 1,S i g n a l 1,O b j e c t 2,S l o t 1);2.2 点灯模块本文设计了点灯模块用于直观地显示如速度到达等数字变量,如条件满足,则显示为绿色,如条件图2 信号与槽关系模型不满足显示为红色,或其他的一些警告性情况,呈红黄色交替显示㊂Q T 平台常采用Q pu s h B u t t o n 类按钮用于变量状态显示,Q p u s h B u t t o n 本身为矩形,本文需要将其变为圆形且显示为特定的图片,这里采用改变样式表的方法,将需要显示的图片样式添加到B u t t o n 的样式表中,并采用s e t S t yl e S h e e t 函数进行设定,例如s e t S t y l e S h e e t ( Q p u s h B u t t o n {b o r d e r -i m a g e :u r l (:/n e w /p r e f i x 1/g r e e n .i c o );} );即将B u t t o n 设置为绿色圆形按钮图片㊂为实现数字变量改变时按钮显示状态随之改变的功能,本文采用了c h a n ge B u t -t o n i c o()函数,代码如下:v o i d B u t t o n ::c h a n ge B u t t o n i c o (){i f (s pe e d I s O K )u i->b u t t o n _s p e e d ->s e t S t yl e S h e e t ( Q p u s h B u t t o n {b o r d e r -i m a g e :u r l (:/n e w /p r e f i x 1/gr e e n .i c o );} );e l s eu i->b u t t o n _s p e e d ->s e t S t y l e S h e e t ( Q p u s h B u t t o n {b o r d e r -i m a g e :u r l (:/n e w /p r e f i x 1/r e d .i c o);} );为实现警告性情况按钮状态呈红黄交替显示,速度到达模块报警,本文采用了Q T i m e r 类t i m e o u t 函数,通过信号与槽机制将Q T i m e r 计时器与用于图片交替显示的i c o C h a n g e ()函数相连,实现代码如下:c o n n e c t (m _t i m e r ,S I G N A L (t i m e o u t ()),t h i s ,S L O T (i c o C h a n ge ());m _t i m e r =n e w Q T i m e r (t h i s );m _t i m e r ->s t a r t (10);在i c o C h a n ge ()函数中,采用了i n t m _c o u n t 101第2期宣翔等:基于Q T 平台的雷达伺服调试系统变量:m _c o u n t +=1;i f (m _c o u n t %2)u i->b u t t o n _s p e e d ->s e t S t yl e S h e e t ( Q p u s h B u t t o n {b o r d e r -i m a g e :u r l (:/n e w /p r e f i x 1/r e d .i c o);} );e l s eu i->b u t t o n _s p e e d ->s e t S t y l e S h e e t ( Q p u s h B u t t o n {b o r d e r -i m a g e :u r l (:/n e w /pr e f i x 1/ye l l o w.i c o );} );if (m _c o u n t ==100)m _c o u n t =0;通过整型变量随时间计数器自加,并向2取余,实现交替改变,当m _c o u n t 到达既定数值时需要置位0,函数循环调用,从而实现状态的循环显示㊂2.3 双缓冲机制Q T 中采用Q P a i n t e r 类绘制图形,当控件重绘频繁时,例如实时采集到变量数值变化并绘制成曲线图时,由于屏幕高频率刷新,从而引起屏幕闪烁,重回频率越高,闪烁越明显[1]㊂双缓冲机制的原理是绘制控件时,首先将要绘制的内容绘制在1个图片中,再将图片一次性绘制到控件上,通过这种方式,可以使图片的擦写过程在幕后进行,避免闪烁的效果,原理如图3所示㊂本文数据采集后绘制的曲线图使得屏幕刷新频率较高,因此需要采用双缓冲机制绘制图形㊂图3 双缓冲机制原理图代码的实现主要通过r e f r e s h P i x m a p()函数,首先将当前的p i x 图像赋值给一个临时的t m pP i x 图像,然后采用Q P a i n t e r 类将采集到的图像信息以及固有的一些属性如坐标轴㊁刻度等在该临时图像上进行绘制,随后通过d r a w P i x m a p ()函数将临时图像绘制到p a i n t e r 上,再通过事件e v e n t 调用p a i n t -e r ,从而实现了实时绘制曲线图,擦写过程均在幕后完成㊂v o i d C u r v e ::r e f r e s h P i x m a p(){Q P a i n t e r p a i n t e r (t h i s);t m pP i x =p i x ;Q P a i n t e r p p (&t m pP i x );Q P e n p e n;Q C o l o r c o l o r (Q t ::w h i t e);pe n .s e t C o l o r (c o l o r )pe n .s e t W i d t h (2);p p .s e t P e n (pe n );p p .s e n R e n d e r H i n t (Q P a i n t e r ::A n t i a l i a s i n g,t r u e);i n t p o i n t x=45,p o i n t y =620;//确认坐标轴起点i n t w i d t h =930-p o i n t x ,h e i gh t =580;p p.d r a w R e c t (5,5,950-10,650-10);p p .d r a w L i n e (p o i n t x ,p o i n t y,w i d t h+p o i n t x ,p o i n t y);p p .d r a w L i n e (p o i n t x ,p o i n t y -h e i g h t ,p o i n t x ,p o i n t y);Q P e n p e n D e gr e e ;p a i n t e r .d r a w P i x m a p (900,700,t m pP i x );}2.4 工具栏设计伺服调试过程中通常需要实时记录实验数据,如曲线图㊁仪表值等等,为满足调试过程的需求,本系统添加了工具栏,列出了如文件保存㊁图片打印㊁文本打印以及放大㊁旋转等常用工具,如图4所示㊂图4 工具栏界面图例如图像打印只需要调用Q P r i n t e r 以及Q P r i n t D i a l o g 2个类即可调用打印机及其属性,并将图像打印到文件中㊂3 通信接口的实现3.1 串口调试模块串口通信的概念是按位发送和接收字节,其重要参数分为:波特率㊁数据位㊁奇偶校验位㊁停止位㊂串口调试模块需要利用到计算机串口驱动,通过设置串口参数实现与外部端口的通信㊂Q T 平台提供了第三方串口库,只需要在Q T p r o 添加Q T +=s e r i a l po r t 代码即可在相应的子程序引用<Q S e r i a l -P o r t >库,使得代码编写过程更为便捷[2]㊂在程序中实现自动寻找可用的端口号用到以下代码:201舰船电子对抗第44卷f o r e a c h(c o n s t Q S e r i a l P o r t I n f o::a v a i l a b l e P o r t s()) {Q S e r i a l P o r t s e r i a l;s e r i a l.s e t P o r t(i n f o);i f(s e r i a l.o p e n(Q I O D e v i c e::R e a d W r i t e)){u i->p o r t N a m e B o x->a d d I t e m(s e r i a l. P o r t N a m e());s e r i a l.c l o s e();}}U I界面设计中,调用Q p u s h B u t t o n以及Q T e x t E d i t类,可以绘制文本输入和接收框以及相应的按钮㊂按钮是否可用通过s e t E n a b e l(b o o l)函数进行设置,例如发送数据按钮与其他设置参数按钮不能同时操作,因此应设置相应的逻辑关系,按钮通过a d d I t e m()函数即可增加选项用于选择,完成后的串口界面如图5所示㊂图5串口调试模块界面图3.2 C A N通信模块设计C A N通信模块是基于C A N总线协议设计的, C A N总线的概念是控制器局域网,其特点主要包括节点不分主从,通过报文I D进行过滤,速度较快且具备错误检测功能㊂C A N通信模块通过Q L i n e E i d t类进行设计,由于该类采用的数据是Q S t r i n g类型,而Q S t r i n g类型数据为了清晰展示,通常采用空格符对数据进行分割,从而增加了数据的长度㊂本文为避免数据传输过程冗长,采用了将Q S t r i n g类转换为c h a r型数据进行传输,从而减少串口传输的数据量㊂通过分析雷达伺服调试过程中可能要采集的数据以及需要下达的指令数据,系统需要的有效数据可能多达10个字节,包括电流㊁速度㊁电压数值等等㊂因此,数据包结构设计如表1所示㊂表1数据包结构表数据包头数据数据校验数据包尾(1字节)(10字节)(1字节)(1字节)为保证数据完整性,C A N通信模块通常采用一种算法对原始数据计算出1个校验值,并将校验值一同发出,接收方用相同的方法计算出校验值进行数据校验,本文采用了目前行业内比较常用的C R C 循环校验法,该方法具有侦错能力强㊁系统消耗小等优点,适用于本系统,主要实现代码如下:v o i d C A N_c o m::C R C_c h e c k(){i f(e n a b l e==1){f o r(i n t i=0;i<c h e c k_s u m-1;i++){c r c=d a t a[i]^c r c;f o r(i n t j=0;j<7;j++){t m p1=c r c&&0X0001;i f(t m p1=0X0001)c r c=c r c“1^0X A001;e l s ec r c=c r c“1;}}}}3.3参数调整和指令下达模块参数调整和指令下达模块即变量输入输出模块,根据雷达伺服系统常用的参数,参数调整和指令下达模块通常包括速度设定,电流门限㊁电压门限㊁使能㊁比例㊁积分㊁微分(P I D)参数调整等㊂本系统通过在界面上提供输入框改变变量值,并通过串口或C A N通信方式送达可编程逻辑控制器(P L C)或其他被控元件,实现参数变更和指令下达的功能[3]㊂4应用实例在某项目中,采用本系统进行雷达伺服系统调试,通过串口通信建立雷达伺服系统和本软件调试系统的连接,计算机端采用U S B转串口模块,P L C(下转第120页)301第2期宣翔等:基于Q T平台的雷达伺服调试系统[2]胡茂海,蒋鸿宇,严俊,等.基于A D9910的多通道信号发生器[J].信息与电子工程,2012,10(1):7781.[3]刘韬.基于D D S的频率源设计与实现[J].电子科技,2013,26(1):5658.[4]张萧.微波D D S频率源技术研究[D].成都:电子科技大学,2013.[5]孟秉林,侯文,刘杏娟.D D S仿真模型的建立[J].山西电子技术,2013(4):5270.[6]任艳玲.基于A D9850的多功能信号源设计[J].电子科技,2015,28(6):179183.[7]陈翘.宽带频率源的研制[D].南京:东南大学,2015.[8] A n a l o g D e v i c e I n c.A D9910d a t a s h e e t[M].N o r w o o d:A n a l o g D e v i c e I n c,2012.[9]喻峰.基于F P G A的低相噪D D S的设计与实现[D].哈尔滨:哈尔滨工业大学,2007.[10]刘韬.基于D D S的频率源设计与实现[J].电子科技,2013,26(1):5658.(上接第103页)通过I O量与多种被控元件如接近开关㊁水平传感器等建立连接,通过C A N总线建立与伺服电机的连接从而接收伺服电机各项反馈量并向其下达控制指令,各被控元件及伺服电机结合传动结构件集成为雷达伺服系统,系统组成图如图6所示㊂图6系统组成图系统上电后,打开串口界面,搜索串口端口号,建立串口连接㊂通过数据采集,接收到伺服电机电压为380V,通过加载使能,给定相应速度,收集并绘制伺服系统某关节部分位置曲线,曲线显示其完成循环往复运动,与实际运动状态拟合㊂同时,调试系统采集到各被控元件的状态信息,并通过伺服调试系统界面的各点灯模块加以显示㊂经分析,本系统实时采集了被控元件的状态信息,并绘制了相应变量的状态曲线,通过参数调整和指令下达模块可以实时改变输出变量的状态从而实现控制被控元件的功能㊂系统简单明了,操作简易,适合伺服调试人员现场调试㊂系统调试界面如图7所示㊂通过实际应用可以发现,本系统信息显示和人工操作完全可以满足雷达伺服系统调试的需要㊂图7雷达伺服调试系统界面5结束语本文通过Q T平台设计了一款用于雷达伺服系统调试的系统,该系统包含了伺服系统常用的参数设定㊁通信方式和状态显示,极大简化了伺服调试人员调试过程㊂此外,该系统性能稳定且价格低廉,具有一定的发展前景㊂参考文献[1]汪洋,李垚,黄鲁.基于Q T和O p e n C V的无线视频监控系统[J].微型机与应用,2015,34(10):6769.[2]吴俊杰,谭勇.基于A R M l i n u x平台的Q t/e自定义键盘实现[J].中国水运,2011(2):7072. [3]杨柳,庞和明,姜琳颖.嵌入L i n u x及S Q L i t e数据库在智能监控中的应用研究[J].微计算机信息,2010,26(24):65-67.021舰船电子对抗第44卷。