机械原理大作业-牛头刨床运动分析(附图)
机械原理大作业——牛头刨床
机械原理大作业——牛头刨床大作业,一,平面连杆机构的运动分析题号: 6班级 : 姓名 : 学号 : 同组者 :成绩 :完成时间 :目录题目、原始数据及要求 ..................................................................... .......................1 一平面连杆机构运动分析方程 ..................................................................... . (1)1.1速度计算公式 ..................................................................... .. (2)1.2加速度计算公式 ..................................................................... ..............2 二程序 ..................................................................... (3)2.1计算程序框图 ..................................................................... (3)2.2计算源程序 ..................................................................... .........................4 三 3.1 (一组数据 Lab =200mm)计算结果 (9)3.2运动线图 ..................................................................... . (10)3.3 体会 ..................................................................... .................................... 12 四 4.1(第二组数据 Lab =150mm)计算结果 . (12)4.2 运动线图 ..................................................................... .. (13)4.3 体会 ..................................................................... .................................... 15 五 5.1(第三组数据 Lab =220mm)计算结果 . (16)5.2 运动线图 ..................................................................... (17)5.3 体会 ..................................................................... ...................................... 21 六参考资料 ..................................................................... (21)题目、原始数据及要求:图所示为一牛头刨床(?级机构)。
机械原理大作业1
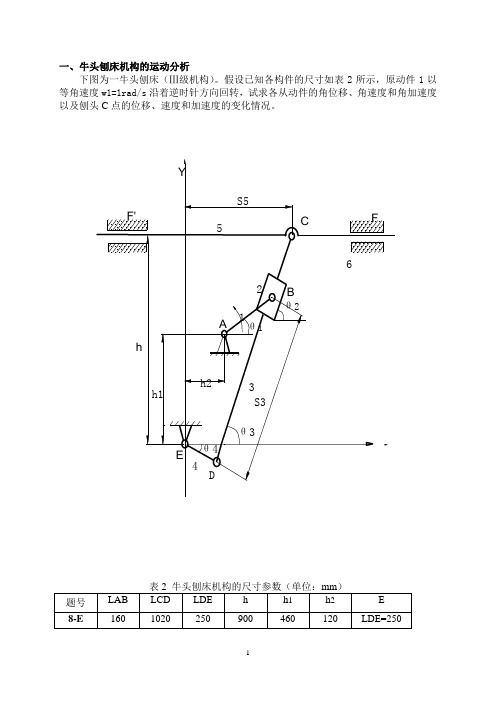
一、牛头刨床机构的运动分析下图为一牛头刨床(Ⅲ级机构)。
假设已知各构件的尺寸如表2所示,原动件1以等角速度w1=1rad/s沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C点的位移、速度和加速度的变化情况。
二、牛头刨床机构的运动分析方程 1)位置分析建立封闭矢量多边形建立一直角坐标系,并标出各杆矢量及其方位角,其中共有4个未知量3θ(θ2=3θ)、4θ、3S 、5S 。
利用两个封闭图形ABDEFA 和EDCGE ,建立两个封闭矢量方程,由此可得:3125DE AB DE CD l s h h l l l h s →→→→→→→→→⎧+=++⎪⎨⎪+=+⎩(1)把(1)写成投影方程得:433214331143543cos *cos *cos *sin *sin *sin *cos *cos 0*sin *sin DE AB DE AB DE CD DE CD l s h l l s h l l l s l l h θθθθθθθθθθ*+=+⎫⎪+=+⎪⎬+-=⎪⎪+=⎭(2) 由以上各式用型转化法可求得4335s s θθ、、、,滑块2的方位角23θθ=2111*cos *sin b AB b AB x h l y h l θθ=+⎧⎨=+⎩ 44*cos *sin d DE d DE x l y l θθ=⎧⎨=⎩3s =3)*sin *()/*cos *(/c d CD d CD b d c d CD d CD b d s x x l x l x x s y y l y l y y s αα=+=+-⎧⎪⎨=+=+-⎪⎩ 3tan c dc dy y x x θ-=- 5c s x =()ae AE =44()tan *cos d c DE y h y l θθ+-=高斯消去法求解 2)速度分析对(2)求一次导数得:44333331144333331144334433*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *0*cos **cos *0DE AB DE AB DE CD c DE CD l s l l s s l l l v l l θωθθωθωθωθθωθωθωθωθωθω-+-=-⎫⎪++=⎪⎬---=⎪⎪+=⎭(3)矩阵式:3334313334313443cos *sin *sin 0'*sin sin *cos *cos 0*cos 0*sin *sin 100*cos *cos 00DE AB DE AB CD DE CD DE c s l s l s l l l l l l v θθθθθθθθθθωθθ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥ω⎢⎥⎢⎥⎢⎥=ω1⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ (4)采用高斯消去法可求解(4)可解得角速度ω2,ω3; 3)加速度分析把(4)对时间求导数得:333433334334434cos *sin *sin 0''sin *cos *cos 00*sin *sin 10*cos *cos 0DE DE CD DE CD DE c s l s s l l l l l a θθθθθθθθαθθ--⎡⎤⎡⎤⎢⎥⎢⎥α⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎣⎦⎣⎦33333444433333343443334443344*sin '*sin **cos **cos 0'*cos '*cos **sin **sin 00**cos **cos 00**sin **sin 0DE DE CD DE CD DE c s s l s s s l l l l l v ωθθωθωθωθθωθωθωθωθωωθωθ----⎡⎤⎡⎤⎢⎥⎢⎥--ω⎢⎥⎢⎥=-⎢⎥⎢⎥--⎢⎥⎢⎥--⎣⎦⎣⎦1111**cos **sin 00AB AB l l ωθωθ-⎡⎤⎢⎥-⎢⎥+ω1⎢⎥⎢⎥⎣⎦(5)采用高斯消去法可求解(5)可解得角加速度α2,α3,α5,α6三、程序流程图四、计算源程序#include<stdio.h>#include<stdlib.h>#include<math.h>/* 定义变量*/const double PI = 3.14159265358979;const int N = 4;const double EPSILON = 0.0001;const int T = 1000;/* 代入已知量*/double Lab=160,Lcd=1020,Lde=250,h=900,h1=460,h2=120,Omega1=1;/* 声明子函数*/void AngleDisplacement(double[12],double);/* 角位移函数*/void AngleVelocity(double[N][N],double[N],double[12],double);/* 角速度函数*/void AngleAcceleration(double[N][N],double[N][N],double[N],double [12]);/* 角加速度函数*/void GaussE(double [N][N],double [N],double [N]);/* 高斯消去法函数*/void ModulusMatrixA(double [12],double [N][N]);/* 矩阵A函数*/void ModulusMatrixB(double [12],double ,double [N]);/* 矩阵B函数*/void MatrixDA(double [12],double [N][N]);/* 矩阵DA函数*/void MatrixDB(double [12],double ,double [N]);/* 矩阵DB函数*//* 主函数*/void main(){int i,j;FILE *fp;double data[36][12];double value[12],a[N][N],da[N][N],b[N],db[N],Phi1;char flag;/* 打开文件*/if((fp = fopen("Data","w")) == NULL){printf("文件打开错误!\n");exit(0);}fprintf(fp,"Lab =%lf \n",Lab);fprintf(fp,"s3\tPhi3\tPhi4\ts5\t");fprintf(fp,"s3'\tOmega3\tOmega4\ts5'\t");fprintf(fp,"s3''\tEpsilon3\tEpsilon4\ts5''");printf("\n\n 牛头刨床机构运动分析程序\n\n\n");printf("\n");printf(" 是否开始计算(Y/N):");scanf("%c",&flag);if(flag =='Y'){/*计算并写入文件*/value[0] = 480;value[1] = 65 * PI / 180;value[2] = 10 * PI / 180;value[3] = 500;for(i = 0;i < 36; i++){Phi1 = i * PI / 18;AngleDisplacement(value,Phi1);ModulusMatrixB(value,Phi1,b);ModulusMatrixA(value,a);AngleVelocity(a,b,value,Phi1);MatrixDA(value,da);MatrixDB(value,Phi1,db);AngleAcceleration(a,da,db,value);for(j = 1;j < 3; j++)value[j] = value[j] * 180 / PI;for(j = 0;j < 12; j++)data[i][j] = value[j];fprintf(fp,"\n");for(j = 0;j < 12; j++)fprintf(fp,"%12.3f\t",data[i][j]);}fclose(fp);/* 输出数据*/printf("\n\n\n计算结果如下:\n");for(i = 0;i < 36; i++){Phi1=i * PI / 18;printf("\n输出Phi1=%d时的求解\n",i*10);printf(" S3 Phi3 Phi5 S5\n");for(j = 0;j < 4; j++)printf("%lf\t",data[i][j]);printf("\n");printf(" S3' Omega3 Omega5S5'\n");for(j = 4;j < 8; j++)printf("%lf\t",data[i][j]);printf("\n");printf(" S3'' Epsilon3 Epsilon5 S5''\n");for(j = 8;j < 12; j++)printf("%lf\t",data[i][j]);printf("\n");}printf("\n程序运行结束,计算结果已写入Date文件中,请打开查看。
牛头刨床的连杆机构运动分析

牛头刨床的连杆机构运动分析0 前言机构运动分析的任务是对于结构型式及尺寸参数已定的具体机构,按主动件的位置、速度和加速度来确定从动件或从动件上指定点的位置、速度和加速度。
许多机械的运动学特性和运动参数直接关系到机械工艺动作的质量,运动参数又是机械动力学分析的依据,所以机构的运动分析是机械设计过程中必不可少的重要环节。
以计算机为手段的解析方法,由于解算速度快,精确度高,程序有一定的通用性,已成为机构运动分析的主要方法。
连杆机构作为在机械制造特别是在加工机械制造中主要用作传动的机构型式,同其他型式机构特别是凸轮机构相比具有很多优点。
连杆机构采用低副连接,结构简单,易于加工、安装并能保证精度要求。
连杆机构可以将主动件的运动通过连杆传递到与执行机构或辅助机构直接或间接相连的从动件,实现间歇运动,满足给定的运动要求,完成机器的工艺操作。
牛头刨床是一种利用工作台的横向运动和纵向往复运动来去除材料的一种切削加工机床。
工作台的纵向往复运动是机床的主运动,实现工件的切削。
工作台的横向运动即是进给运动,实现对切削精度的控制。
本文中只分析纵向运动的运动特性。
牛头刨床有很多机构组成,其中实现刨头切削运动的六连杆机构是一个关键机构。
刨床工作时,通过六杆机构驱动刨刀作往复移动。
刨刀右行时,当刨刀处于工作行程时;要求刨刀的速度较低且平稳,以减小原动机的容量和提高切削质量。
当刨刀处于返回行程时,刨刀不工作,称为空行程,此时要求刨刀的速度较高以提高生产率。
由此可见,牛头刨床的纵向运动特性对机床的性能有决定性的影响。
1 牛头刨床的六连杆机构牛头刨床有很多机构组成,其中实现刨头切削运动的六杆机构是一个关键机构。
图1所示的为一牛头刨床的六连杆机构。
杆1为原动件,刨刀装在C点上。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s沿着逆时针方向回转,要求分析各从动件的角位移、角速度和角加速度以及刨刀C点的位移、速度和加速度的变化情况。
牛头刨床机械原理分析
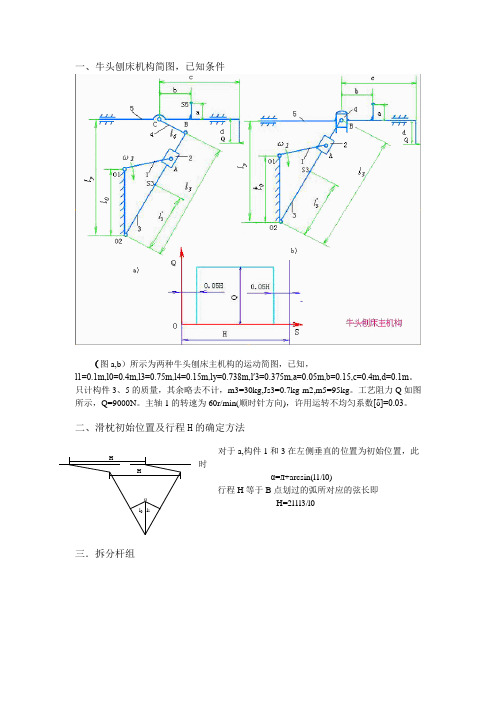
α l 1 l 0 H H 一、牛头刨床机构简图,已知条件(图a,b )所示为两种牛头刨床主机构的运动简图,已知,l1=0.1m,l0=0.4m,l3=0.75m,l4=0.15m,ly=0.738m,l′3=0.375m,a=0.05m,b=0.15,c=0.4m,d=0.1m 。
只计构件3、5的质量,其余略去不计,m3=30kg,Js3=0.7kg·m2,m5=95kg 。
工艺阻力Q 如图所示,Q=9000N 。
主轴1的转速为60r/min(顺时针方向),许用运转不均匀系数[δ]=0.03。
二、滑枕初始位置及行程H 的确定方法对于a,构件1和3在左侧垂直的位置为初始位置,此时 α=л+arcsin(l1/l0)行程H 等于B 点划过的弧所对应的弦长即H=2l1l3/l0三.拆分杆组四. 所调用的杆组子程序中虚参与实参对照表,源程序及运行结果4.1 a的运动分析。
源程序#include "graphics.h"/*图形库*/#include "subk.c"/*运动分析子程序*/#include "draw.c"/*绘图子程序*/main(){static double p[20][2],vp[20][2],ap[20][2],del;/*定义位置速度加速度数组和角度间隔*/ static double t[10],w[10],e[10],pdraw[370],vpdraw[370],apdraw[370];/*定义角度角速度角加速度数组和位置速度加速度方向*/static int ic;double r13,r24,r45,r27,r58;double r2,vr2,ar2;int i;double pi,dr;FILE*fp;char *m[]={"p","vp","ap"};/*定义指针*/r13=0.1;r24=0.75;r45=0.15;r27=0.375;r58=0.15;/*给长度付值*/del=15;/*给角度间隔付值*/t[6]=0.0;w[6]=0.0;e[6]=0.0;/*确定初始点*/pi=4.0*atan(1.0); /*求л*/dr=pi/180.0; /*求弧度*/w[1]=-2*pi;e[1]=0.0;p[1][1]=0.0;p[1][2]=0.0;p[2][1]=0.0;p[2][2]=-0.4;p[6][1]=0.0;p[6][2]=0.338; /*赋定铰链值*/printf(" \n The Kinematic Parameters of Point 6\n");printf("No THETA1 S6 V6 A6\n");printf(" deg m m/s m/s/s\n");/*在屏幕上写表头*/if((fp=fopen("zouye's k result","w"))==NULL){printf(" Can't open this file.\n");exit(0);}/*建立并打开文件zouye's k result*/ fprintf(fp," \n The Kinematic Parameters of Point 6\n");fprintf(fp,"No THETA1 S6 V6 A6\n"); fprintf(fp," deg m m/s m/s/s");/*在文件zouye's k result中写表头*/ ic=(int)(360.0/del);for(i=0;i<=ic;i++) /*建立循环,调用运动分析子程序*/ { t[1]=(i)*del*dr-asin(0.25);bark(1,3,0,1,r13,0.0,0.0,t,w,e,p,vp,ap);rprk(1,2,3,3,2,0.0,&r2, &vr2, &ar2, t,w,e,p,vp,ap);bark(2,4,0,3,r24,0.0, 0.0,t,w,e,p,vp,ap);rrpk(0,4,6,5,4,5,6,r45 ,&r2,&vr2,&ar2,t,w,e,p,vp,ap);/*r2,vr2,ar2在子程序中已定义为指针变量,所以其前面要加&符号*/ printf("\n%2d %12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,p[5][1],vp[5][1],ap[5][1]);/*把运算结果写屏幕上*/fprintf(fp,"\n%2d %12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,p[5][1],vp[5][1],ap[5][1]);/*把运算结果写在文件中*/pdraw[i]=p[5][1];vpdraw[i]=vp[5][1];apdraw[i]=ap[5][1];/*将运算结果传给pdraw[i] 、vpdraw[i] 、apdraw[i]以备绘图使用*/ if((i%16)==0){getch();} /*屏幕满16行停顿*/}fclose(fp); /*关闭文件zouye's k result*/getch();draw1(del,pdraw,vpdraw,apdraw,ic); /*调用绘图程序*/}运行结果The Kinematic Parameters of Point 6No. THETA1 S6 V6 A6deg m m/s m/s/s1 -14.478 0.038 0.000 -7.5532 0.522 0.032 0.282 -6.0023 15.522 0.015 0.502 -4.5794 30.522 -0.009 0.667 -3.3965 45.522 -0.040 0.788 -2.4336 60.522 -0.074 0.872 -1.6147 75.522 -0.112 0.923 -0.8498 90.522 -0.151 0.943 -0.0679 105.522 -0.190 0.928 0.77610 120.522 -0.228 0.877 1.68911 135.522 -0.263 0.787 2.66212 150.522 -0.293 0.654 3.68413 165.522 -0.316 0.479 4.76714 180.522 -0.332 0.256 5.96715 195.522 -0.337 -0.021 7.35416 210.522 -0.329 -0.359 8.84517 225.522 -0.306 -0.752 9.85018 240.522 -0.266 -1.155 9.06619 255.522 -0.211 -1.466 5.34720 270.522 -0.147 -1.570 -0.47421 285.522 -0.084 -1.434 -5.76222 300.522 -0.030 -1.123 -8.77723 315.522 0.009 -0.734 -9.57724 330.522 0.031 -0.345 -8.92425 345.522 0.038 -0.000 -7.5534.2 a的动态静力学分析源程序#include"graphics.h" /*图形库*/#include"subk.c" /*运动分析子程序*/#include"subf.c" /*动态静力分析子程序*/#include"draw.c" /*绘图子程序*/main(){static double p[20][2],vp[20][2],ap[20][2],del;static double t[10],w[10],e[10],tbdraw[370],tb1draw[370];static double fr[20][2],fe[20][2],fk[20][2],pk[20][2];static int ic;double sita1[370],fr1draw[370],sita2[370],fr2draw[370],sita3[370],fr3draw[370];double r13,r24,r29,r45,r49,r57,r58,r411;double r2,vr2,ar2,tb,we4;int i;double pi,dr,gam7,gam8,fr1,bt1,fr2,bt2,fr3,bt3,we1,we2,we3,we5,tb1;FILE *fp;sm[1]=0.0;sm[2]=0.0;sm[3]=30.0;sm[4]=0.0;sm[5]=95.0;sj[1]=0.0;sj[2]=0.0;sj[3]=0.7;sj[4]=0.0;sj[5]=0.0;r13=0.1;r24=0.75;r45=0.15;r29=0.375,r57=0.158;r58=0.412,r49=r45/2;gam7=0.24;gam8=-0.32;w[1]=-6.3;e[1]=0.0;del=15.0;t[5]=0.0; /*赋值*/pi=4.0*atan(1.0); /*求л*/dr=pi/180.0; /*求弧度*/t[5]=t[5]*dr; /*变角度为弧度*/p[2][1]=0.00;p[2][2]=-0.40;p[8][1]=0.0;p[8][2]=0.338; /*赋定铰链值*/printf("\n The Kineto-static Analysis of a Six-bar Linkase\n");printf("NO THETA1 FR1 BT1 FR2 BT2 TB TB1\n");printf(" (deg.) (N) (deg.) (N) (deg.) (N.M) (N.M)\n");/*在屏幕上写表头*/if((fp=fopen("zouye's f result","w"))==NULL){printf("Can't open this file.\n");exit(0);} /*建立并打开文件zouye's f result*/ fprintf(fp,"\n The Kineto-static Analysis of a Six-bar Linkase\n");fprintf(fp,"NO THETA1 FR1 BT1 FR2 BT2 TB TB1\n");fprintf(fp," (deg.) (N) (deg.) (N) (deg.) (N.M) (N.M)\n");/*在文件中写表头*/ic=(int)(360.0/del);for(i=0;i<=ic;i++) /*建立循环,调用运动分析子程序*/{t[1]=(double)(i)*del*dr+3.4;bark(1,3,0,1,r13,0.0,0.0,t,w,e,p,vp,ap);rprk(1,2,3,3,2,0.0,&r2,&vr2,&ar2,t,w,e,p,vp,ap);bark(3,0,3,3,0.0,0.0,0.0,t,w,e,p,vp,ap);bark(2,0,4,2,0.0,r24,0.0,t,w,e,p,vp,ap);bark(2,0,9,2,0.0,r29,0.0,t,w,e,p,vp,ap);rrpk(1,4,6,5,4,5,6,r45,&r2,&vr2,&ar2,t,w,e,p,vp,ap);bark(4,0,11,4,0.0,r411,0.0,t,w,e,p,vp,ap);bark(5,0,7,5,0.0,r57,gam7,t,w,e,p,vp,ap);bark(4,0,5,4,0.0,r45,0.0,t,w,e,p,vp,ap);bark(5,0,8,5,0.0,r58,gam8,t,w,e,p,vp,ap);rrpf(4,6,5,11,7,0,8,8,4,5,p,vp,ap,t,w,e,fr,fk,pk);rprf(2,3,9,3,4,0,0,2,3,p,vp,ap,t,w,e,fr,fk,pk);barf(1,1,3,1,p,ap,e,fr,&tb);/*r2,vr2,ar2,tb在子程序中已定义为指针变量,所以前面要加&符号*/ fr1=sqrt(fr[1][1]*fr[1][1]+fr[1][2]*fr[1][2]);bt1=atan2(fr[1][2],fr[1][1]);fr2=sqrt(fr[2][1]*fr[2][1]+fr[2][2]*fr[2][2]);bt2=atan2(fr[2][2],fr[2][1]);fr3=sqrt(fr[3][1]*fr[3][1]+fr[3][2]*fr[3][2]);bt3=atan2(fr[3][2],fr[3][1]);/*求合力的大小和方向*/we1=-(ap[1][1]*vp[1][1]+(ap[1][2]+9.81)*vp[1][2])*sm[1]-e[1]*w[1]*sj[1];we2=-ap[9][1]*vp[9][1]*sm[2]+fe[9][1]*vp[9][1];we3=-(ap[3][1]*vp[3][1]+(ap[3][2]+9.81)*vp[3][2])*sm[3]-e[3]*w[3]*sj[3];we4=-(ap[11][1]*vp[11][1]+(ap[11][2]+9.81)*vp[11][2])*sm[4]-e[4]*w[4]*sj[4];extf(p,vp,ap,t,w,e,8,fe);we5=-ap[7][1]*vp[7][1]*sm[5]+fe[8][1]*vp[7][1];tb1=-(we1+we2+we3+we4+we5)/w[1];/*用简易方法求平衡力偶*/printf("%3d%6.0f%11.3f%11.3f%11.3f%11.3f%11.3f%11.3f\n",i,t[1]/dr,fr1,bt1/dr,fr2,bt2/dr,tb,tb1 );/*把运动结果写屏幕上*/fprintf(fp,"%3d%6.0f%11.3f%11.3f%11.3f%11.3f%11.3f%11.3f\n",i,t[1]/dr,fr1,bt1/dr,fr2,bt2/dr,tb ,tb1); /*把运动结果写入文件中*/tbdraw[i]=tb;tb1draw[i]=tb1;fr1draw[i]=fr1;fr2draw[i]=fr2;fr3draw[i]=fr3;sita1[i]=bt1;sita2[i]=bt2;sita3[i]=bt3;/*把运算结果传给tbdraw[i] tb1draw[i] fr1draw[i] fr2draw[i] fr3draw[i]以备绘图使用*/ if(i%16==0)getch(); /*屏幕满16行停顿*/}fclose(fp); /*关闭文件zouye's f result*/getch();draw2(del,tbdraw,tb1draw,ic);draw3(del,sita1,fr1draw,sita2,fr2draw,sita3,fr3draw,ic);}extf(p,vp,ap,t,w,e,nexf,fe)double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[10][2];int nexf;{fe[nexf][2]=0.0;if(vp[nexf][1]>0){if(p[nexf][1]<0.72&&p[nexf][1]>0.38)fe[nexf][1]=-9000.0;else fe[nexf][1]=0.0;}else{fe[nexf][1]=0.0;}}The Kineto-static Analysis of a Six-bar LinkaseNO THETA1 FR1 BT1 FR2 BT2 TB TB1 (deg.) (N) (deg.) (N) (deg.) (N.M) (N.M)0 195 355.282 67.989 18.632 -165.523 -28.442 -28.4421 210 1923.754 23.436 924.150 -152.846 21.344 21.3442 225 2166.498 21.500 1124.030 -155.945 85.714 85.7143 240 2104.241 19.591 1153.267 -160.299 135.860 135.8604 255 1493.323 20.672 830.703 -166.272 121.017 121.0175 270 438.405 70.608 87.693 -173.789 14.416 14.4166 285 1392.150 158.254 760.026 -2.611 -111.834 -111.8347 300 2237.518 161.116 1214.604 -11.494 -147.706 -147.7068 315 2306.569 159.114 1189.988 -19.540 -94.948 -94.9489 330 1972.225 156.805 947.071 -25.768 -24.032 -24.03210 345 1580.374 155.081 693.725 -29.381 26.695 26.69511 360 1250.442 154.093 493.780 -29.921 54.252 54.25212 375 14248.360 -11.867 6232.520 152.281 -639.605 -639.60513 390 13939.753 -10.053 5580.259 158.149 -893.387 -893.38714 405 13734.891 -7.761 5076.677 166.790 -1090.629 -1090.62915 420 13601.753 -5.127 4765.469 177.276 -1232.061 -1232.06116 435 13529.369 -2.270 4660.370 -171.892 -1318.662 -1318.66217 450 13527.866 0.703 4734.618 -162.283 -1352.621 -1352.62118 465 13625.388 3.691 4942.696 -154.888 -1336.983 -1336.98319 480 13862.436 6.591 5254.181 -149.980 -1274.005 -1274.00520 495 14284.767 9.293 5671.992 -147.349 -1162.759 -1162.75921 510 14935.884 11.674 6229.899 -146.549 -996.859 -996.85922 525 931.348 27.133 330.571 -147.622 -62.714 -62.71423 540 1223.460 26.116 483.274 -148.826 -54.228 -54.22824 555 1570.895 24.954 687.806 -150.565 -27.678 -27.678五、飞轮转动惯量计算1、飞轮转动惯量的计算方法1)计算等效驱动力矩Td;2)计算间隔i-1,i内的盈亏功;3)计算个离散点处的盈亏功Ei;4)挑选处Emax和Emin,最大盈亏功为Emax-Emin;5)计算飞轮转动惯量Jf。
牛头刨床工作原理

1.棘轮机构的工作原理:
当主动摆杆逆时针摆动时,摆杆上铰接的主动棘 爪插入棘轮的齿槽中,推动棘轮同向转动一定角 度,制动在棘轮的背上滑过。当摇杆逆时针方向 转动,棘轮在齿背上滑过,止回棘爪阻止棘轮反 向转动,此时主动棘爪在棘轮的齿背上滑回原位, 棘轮静止不动。此机构将主动件的往复摆动转换 为从动棘轮的单向间歇转动。
连杆机构的急回特性
1.凸轮机构特点及运用:
优点:简单紧凑,易于设计,只要适当的设计凸
轮轮廓,就可以实现复杂或特殊的运动;
缺点:凸轮轮廓曲线加工比较复杂,易磨损,不
便润滑,故传力不大。
应用:自动机 半自动机。
2.凸轮机构的分类:
1.按凸轮形状分类: 盘形凸轮 移动凸轮 圆 柱凸轮;
2.按从动件的形式分 类 :尖顶从动件 滚 子从动件 平底从动件 球面底从动件。
牛头刨床机械系统及工 作原理
牛头刨床外形图及基本参数
牛头刨床主要由床身、滑枕、 刀架、工作台、横梁等组成, 如图所示。因其滑枕和刀架形 似牛头而得名。
牛头刨床外形图 1-工作台2-刀架3-滑枕4-床身5-变速手柄 6-滑枕行程调节柄7-横向进给手柄8-横梁
牛头刨床解析
牛头刨床工作时,装有刀架的滑枕3由床身内部的摆杆 带动,沿床身顶部的导轨作直线往复运动,使刀具实现 切削过程的主运动,通过调整变速手柄5可以改变滑枕 的运动速度,行程长度则可通过滑枕行程调节柄6调节。 刀具安装在刀架2前端的抬刀板上,转动刀架上方的手 轮,可使刀架沿滑枕前端的垂直导轨上下移动。刀架还 可沿水平轴偏转,用以刨削侧面和斜面。滑枕回程时, 抬刀板可将刨刀朝前上方抬起,以免刀具擦伤已加工表 面。夹具或工件则安装在工作台1上,并可沿横梁8上的 导轨作间歇的横向移动,实现切削过程的进给运动。横 梁8还可沿床身的竖直导轨上、下移动,以调整工件与 刨刀的相对位置。
牛头刨床机构运动分析

高等机构学题目: 牛头刨床机构运动分析院系名称:机械与动力学院专业班级:机械工程学生姓名:学号:学生姓名:学号:学生姓名:学号:指导教师:2015年12 月17日目录一问题描述................................................................................................................................ - 1 -二运动分析................................................................................................................................ - 1 -2.1矢量法构建机构独立位置方程 ............................................................................. - 1 -2.2机构速度分析 ............................................................................................................. - 2 -2.3机构加速度分析......................................................................................................... - 2 -2.4机构运动线图绘制.................................................................................................... - 3 -三总结......................................................................................................................................... - 4 -附录一:Matlab程序............................................................................................................... - 4 -牛头刨床机构运动分析一 问题描述如图1-1所示的牛头刨床机构中,800h mm =,1360h mm =,2120h mm =,200AB l mm =,960CD l mm =,160DE l mm =。
机械课程设计--牛头刨床导杆机构的运动分析、动态静力分析
青岛理工大学琴岛学院课程设计说明书课题名称:机械原理课程设计学院:机电工程系专业班级:机械设计制造及其自动化11-21班学号:学生:指导老师:2011年12月16日《机械原理课程设计》评阅书题目牛头刨床导杆机构的运动分析、动态静力分析学生姓名学号20110271023 指导教师评语及成绩指导教师签名:年月日答辩评语及成绩答辩教师签名:年月日教研室意见总成绩:室主任签名:年月日摘 要选取方案一,利用图解法对6点状态时牛头刨床导杆机构进行运动分析、动态静力分析,并汇总本方案所得各位置点的速度、加速度、机构受力数据绘制θθθθ----b M a v s ,,,曲线图。
进行方案比较,确定最佳方案。
将一个班级分为 3 组,每组12人左右,一组选择一个备选方案进行如下分析工作: 课程设计内容:牛头刨床导杆机构的运动分析、动态静力分析; (1)绘制机构运动简图(两个位置); (2)速度分析、加速度分析;(3)机构受力分析(求平衡力矩b M ); (4)绘制运动线图t M t a t v t s b ----,,,。
(上述四项作在一张0号图纸上目录青岛理工大学琴岛学院 (1)课程设计说明书 (1)摘要 (3)1设计任务 (5)2 导杆机构的运动分析 (6)3导杆机构的动态静力分析 (9)5总结 (12)6参考文献 (13)1设计任务一、课程设计的性质、目的和任务1.课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。
其意义和目的在于:以机械系统运动方案设计为结合点,把机械原理课程设计的各章理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识;培养学生独立解决有关本课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个较完整的概念,具备计算、制图和使用技术资料的能力。
2.课程设计的任务:机械原理课程设计的任务是对机器的主题机构进行运动分析。
机械原理大作业——牛头刨床
机械原理大作业——牛头刨床牛头刨床是一种常见的机械设备,广泛应用于木工加工行业。
它主要用于对木材进行刨削,以获得平整的表面和精确的尺寸。
本文将详细介绍牛头刨床的工作原理、结构组成、操作步骤以及相关注意事项。
一、工作原理牛头刨床的工作原理基于刨床刀具的旋转和木材的挪移。
刨床刀具通常由多个刀片组成,固定在刨床刀轴上。
当刨床启动时,刀轴开始旋转,刀片切入木材表面,并将其刨削。
同时,木材被放置在刨床工作台上,工作台会通过传动装置使木材沿水平方向挪移,从而实现对木材的刨削。
二、结构组成牛头刨床主要由以下几个部份组成:1. 床身:刨床的主体部份,通常由铸铁或者钢板制成,具有足够的强度和刚性。
2. 工作台:用于放置木材的平台,通常由铸铁制成,具有平整的表面和可调节的高度。
3. 刀轴:刨床刀具的旋转轴,通常由钢材制成,固定在床身上,并通过机电带动旋转。
4. 刀座:用于固定刨床刀具的部件,通常由铸铁制成,固定在刀轴上。
5. 传动装置:用于驱动工作台沿水平方向挪移的装置,通常由机电和传动皮带组成。
三、操作步骤1. 准备工作:确保牛头刨床的工作环境干净整洁,刨床刀具安装完好,工作台调整到适当的高度。
2. 放置木材:将待刨削的木材放置在工作台上,并确保其与刨床刀具没有干涉。
3. 启动刨床:按下启动按钮,刨床开始运转。
此时,刨床刀具开始旋转,木材开始被刨削。
4. 调整刨削深度:根据需要,通过旋转调节手柄或者调节杆,调整刨床刀具的刨削深度。
刨削深度的调整应逐渐进行,以避免过度刨削。
5. 挪移木材:通过操作传动装置,使工作台沿水平方向挪移,从而使木材被刨削的表面逐渐变化。
6. 检查刨削效果:定期住手刨床,检查刨削的木材表面,确保其平整度和尺寸精确度符合要求。
7. 完成工作:刨削完成后,关闭刨床,并将刨床刀具进行清洁和保养。
四、注意事项1. 操作人员应穿戴好防护设备,如安全眼镜和手套,以避免意外伤害。
2. 在操作过程中,应保持专注,避免分散注意力,以防止意外发生。
牛头刨床导杆机构的运动分析、动态静力分析
摘要——牛头刨床运动和动力分析一、机构简介与设计数据1、机构简介牛头刨床是一种用于平面切削加工的机床,如图1-1a。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2 –3 –4 –5 –6 带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生常率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1 – 9 – 10 – 11 与棘轮带动螺旋机构(图中未画),使工作台连同工件做一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,图1-1b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量a b图目录摘要 (III)1设计任务 (1)2 导杆机构的运动分析 (2)导杆机构的动态静力分析 (4)3.1运动副反作用力分析 (4)3.2力矩分析 (6)4方案比较 (7)5总结 (10)6参考文献 (10)《机械原理课程设计》说明书1设计任务机械原理课程设计的任务是对机器的主题机构进行运动分析。
动态静力分析,确定曲柄平衡力矩,并对不同法案进行比较,以确定最优方案。
要求根据设计任务,绘制必要的图纸和编写说明书等。
2 导杆机构的运动分析2.1 速度分析取曲柄位置1’对其进行速度分析,因为2和3在以转动副相连,所以V A2=V A3,其大小等于ω2l02A,指向于ω2相同。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得υA4 = υA3 + υA4A3大小 ? √ ?方向⊥O4A ⊥O2A ∥O4B选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νA4=0.088m/sνA3=0.816m/s取5构件作为研究对象,列速度矢量方程,得υC5 = υB5 + υC5B5大小 ? √ ?方向∥XX ⊥O4B ⊥BC取速度极点p,选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νC5=0.16m/sνC5B5=0.044m/s2.2 加速度分析取曲柄位置“1”进行加速度分析。
牛头刨床
牛头刨床的组成
原动部分:电动机; 传动部分:带轮机构,齿轮机构,曲轴连杆机构, 棘轮机构,螺旋机构; 执行部分:滑枕 ,工作台; 控制部分:离合手柄,变速控制手柄。
牛头刨床外形图及基本参数
牛头刨床主要由床身、滑枕、 刀架、工作台、横梁等组成, 如图所示。因其滑枕和刀架形 似牛头而得名。
牛头刨床外形图 1-工作台2-刀架3-滑枕4-床身5-变速手柄 6-滑枕行程调节柄7-横向进给手柄8-横梁
牛头刨床运动动图
牛头刨床运动简图
依靠四杆机构的连续往复运动来驱动棘爪, 从而实现棘轮的单向间歇运动。实现工作台H
计算
谢谢!
2016年1月11日
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理大作业——10A班级:姓名:学号:位置方程利用两个封闭图形ABDEA和EDCGE,建立两个封闭矢量方程,由此可得:⎭⎬⎫+=++=+' s l l s l l l l56431643 (1) 把(1)式分别向x 轴、y 轴投影得:⎪⎪⎭⎪⎪⎬⎫=+=++=++=+ h l l s l l l h s l l h s l 33445334411133441123344sin sin cos cos sin sin sin cos cos cos θθθθθθθθθθ(2) 在(2)式中包含3s 、5s 、3θ、4θ四个未知数,消去其中三个可得到只含4θ一个未知数 方程:[][]{}[][]sin sin sin 2sin cos cos sin sin 244111234424224244112244111=-+--+-++-+θθθθθθθθl l h l hl h l l l h l l h(3)当1θ取不同值时,用牛顿迭代法解(3)式,可以求出每个4θ的值,再根据方程组(2)可以求出其他杆件的位置参数3s 、5s 、3θ的值:⎪⎪⎭⎪⎪⎬⎫-+=+=-= 3441113334453443sin sin sin cos cos )sin arcsin(θθθθθθθl l h s l l s l l h (4)速度方程对(2)式对时间求一次导数并把结果写成矩阵的形式得:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----00cos sin 0cos cos 01sin sin 00cos cos sin 0sin sin cos 1111143443344334433344333θθωωωθθθθθθθθθθl l v v l l l l l s l s C e B (5)其中C v 为刨刀的水平速度,v eB 为滑块2相对于杆3的速度。
由于每个1θ对应的3s 、3θ、4θ已求出,方程组式(5)的系数矩阵均为常数,采用按列选主元的高斯消去法可求解(式5)可解得角速度ω3、ω4、eB v 、C v加速度方程把(5)对时间求导得矩阵式:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡----------=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----00sin cos 0sin sin 00cos cos 00sin sin cos cos 0cos cos sin sin 0cos cos 01sin sin 00cos cos sin 0sin sin cos 11111114344433344433344433333344433333343443344334433344333θωθωωωωθωθωθωθωθωθωθθωθωθωθθωααl l v v l l l l l s v l s v a a θl θl θl θl θl θs θθl θs θC eBe B eBC e B(6)同样采用按列选主元的高斯消去法可求解(6)可得角加速度3α、4α、eB a 、C a %主程序开始clear;clc;l1=180; %L1=lab l3=960; %l3=lCD l4=160; %l4=lED h=900; h1=460; h2=110; du=180/pi; omega1=1; alpha1=0;theta1=linspace(0,35*pi/18,36);%定义常量和已知参数,l1代表杆1的长度,l3代表杆3的长度,l4代表杆4的长度,h 表示EG 的长度,h1表示AE 的竖直距离,h2表示AE 的水平距离,theta1表示角θ1的不同值。
theta3=zeros(1,36);theta4=zeros(1,36);s3=zeros(1,36);s5=zeros(1,36);test=zeros(1,36);vBe=zeros(1,36);vc=zeros(1,36);omega1=ones(1,36);omega3=zeros(1,36);omega4=zeros(1,36);aBe=zeros(1,36);ac=zeros(1,36);alpha1=zeros(1,36);alpha3=zeros(1,36);alpha4=zeros(1,36);A=zeros(4,4); dA=zeros(4,1);%定义最终的结果数据,当θ1取不同值时,theta3表示θ3的值,theta4表示θ4的值,s3表示BD 的长度,s5表示GC 的长度,vBe 表示B 点在杆3上运动的速度,vc 表示杆5的运动速度,即牛头刨刀的速度,omega3表示杆3的转动角速度,omega4表示杆4的转动角速度,aBe 表示B 点在杆3上运动的角加速度,ac 表示杆5的加速度,即牛头刨刀的加速度,alpha3表示杆3的角加速度,alpha4表示杆4的角加速度,矩阵A,dA 表示线性方程组的系数矩阵i=0; %i 为循环变量,在循环结构中使用 syms THETA1 THETA4 %定义符号变量,为以下计算做准备 fun1=((h1+l1*sin(THETA1)-l4*sin(THETA4))^2+(h2+l1*cos(THETA1)-l4*cos(THETA4))^2)*(l4^2*sin(THETA4)^2+h^2-2*h*l4*sin(THETA4))-l3^2*(h1+l1*sin(THETA1)-l4*sin(THETA4))^2; %定义迭代法中要求解的关于THETA4的方程。
x0=0; %定义在牛顿迭代法中的变量THEA4的初值。
for i=1:36 %用循环结构求当theta1取不同值时,theta3值。
fun2=subs(fun1,THETA1,theta1(i));%把不同的THETA1的值代入要求解的方程[theta4(i),EA,it]=NEWTON(fun2,'THETA4',x0,0.0001,1000);%用牛顿迭代法求得THEATA4,并赋值到theta4的数组中x0=theta4(i); %把这次计算的解作为下一次计算的初值。
endfor i=1:36%用循环结构求当theta1的值取不同值时,theta3、s3、s5的取值。
因为theta3的值可能的取值范围为[0,π],对theta3求解时应分以下两种情况讨论if sign(h2+l1*cos(theta1(i))-l4*cos(theta4(i)))>0 %theta3<π/2theta3(i)=asin((h-l4*sin(theta4(i)))/l3);else theta3(i)=pi-asin((h-l4*sin(theta4(i)))/l3); %theta3>π/2endtest(i)=h1+l1*sin(theta1(i))-l4*sin(theta4(i));s5(i)=l4*cos(theta4(i))+l3*cos(theta3(i));s3(i)=(h1+l1*sin(theta1(i))-l4*sin(theta4(i)))/sin(theta3(i));endfor i=1:36%用循环结构求当theta1的值取不同值时vBe、omega3、omega4、vc的值。
A(1,1)=cos(theta3(i));A(1,2)=-s3(i)*sin(theta3(i));A(1,3)=-l4*sin(theta4(i));A(2,1)=sin(theta3(i));A(2,2)=s3(i)*cos(theta3(i));A(2,3)=l4*cos(theta4(i));A(3,2)=-l3*sin(theta3(i));A(3,3)=-l4*sin(theta4(i));A(3,4)=-1;A(4,2)=l3*cos(theta3(i));A(4,3)=l4*cos(theta4(i));dA(1,1)=-omega1(1,1)*l1*sin(theta1(i));dA(2,1)=omega1(1,2)*l1*cos(theta1(i));x=gauss(A,dA); %用按列选主元的高斯消去法求解vBe(i)=x(1);omega3(i)=x(2);omega4(i)=x(3);vc(i)=x(4);%把求得的结构赋值给各物理量endfor i=1:36 %用循环结构求当theta1的值取不同值时aBe、alpha3、alpha4、vc的值。
A(1,1)=cos(theta3(i));A(1,2)=-s3(i)*sin(theta3(i));A(1,3)=-l4*sin(theta4(i));A(2,1)=sin(theta3(i));A(2,2)=s3(i)*cos(theta3(i));A(2,3)=l4*cos(theta4(i));A(3,2)=-l3*sin(theta3(i));A(3,3)=-l4*sin(theta4(i));A(3,4)=-1;A(4,2)=l3*cos(theta3(i));A(4,3)=l4*cos(theta4(i));dA(1,1)=-omega3(i)*sin(theta3(i))*vBe(i)*2-s3(i)*omega3(i)^2*cos(theta3(i))-l4*omega4(i)^ 2*cos(theta4(i))-l1*cos(theta1(i));dA(2,1)=omega3(i)*cos(theta3(i))*vBe(i)*2-s3(i)*omega3(i)^2*sin(theta3(i))-l4*omega4(i)^2*sin( theta4(i))-l1*sin(theta1(i));dA(3,1)=-l3*omega3(i)^2*cos(theta3(i))-l4*omega4(i)^2*cos(theta4(i));dA(4,1)=-l3*omega3(i)^2*sin(theta3(i))-l4*omega4(i)^2*sin(theta4(i));%构造速度方程的系数矩阵x=gauss(A,dA); %用按列选主元的高斯消去法求解aBe(i)=x(1);alpha3(i)=x(2);alpha4(i)=x(3);ac(i)=x(4);%把求得的结构赋值给各物理量end%主程序结束%出图程序figure(1);i=1:10:360;%l3角位移图subplot(2,2,1);plot(i,theta3*du,'r');title('角位移图');xlabel('曲柄转角\theta_1/\circ'); ylabel('角位移/\circ');grid on;hold on;text(200,110,'\theta3');%l4角位移图subplot(2,2,2);plot(i,theta4*du,'r');title('角位移图');xlabel('曲柄转角\theta_1/\circ'); ylabel('角位移/\circ');grid on;hold on;text(150,10,'\theta4');%滑块2位移subplot(2,2,3);plot(i,s3,'r');title('位置');xlabel('滑块位置\s3/\circ');ylabel('毫米/\circ');grid on;hold on;text(150,500,'s3');%c点位移subplot(2,2,4);plot(i,s5,'r');title('位置');xlabel('滑块位置\s3/\circ');ylabel('毫米/\circ');grid on;hold on;text(150,0,'s5');figure(2);%l3角速度subplot(2,2,1);plot(i,omega3,'r');title('角速度图');xlabel('曲柄转角\theta_1/\circ') ylabel('角速度/rad\cdots^{-1}') grid on;hold on;text(150,0,'\omega_3');%l4角速度subplot(2,2,2);plot(i,omega4,'r');title('角速度图');xlabel('曲柄转角\theta_1/\circ') ylabel('角速度/rad\cdots^{-1}') grid on;hold on;text(150,0.2,'\omega_4');%c点速度subplot(2,2,3);plot(i,vc,'r');title('速度图');xlabel('曲柄转角\theta_1/\circ'); ylabel('速度mm/s');grid on;hold on;text(200,0,'Vc');%l4的速度subplot(2,2,4);plot(i,vBe,'r');title('速度图');xlabel('曲柄转角\theta_1/\circ'); ylabel('速度mm/s');grid on;hold on;text(200,-100,'Vbe');figure(3);%l3 角加速度图subplot(2,2,1);plot(i,alpha3,'r');title('角加速度图');xlabel('曲柄转角\theta_1/\circ') ylabel('角加速度/rad\cdots^{-2}')grid on;hold on;text(200,-0.1,'\alpha_3');%l4 角加速度图subplot(2,2,2);plot(i,alpha4,'r');title('角加速度图');xlabel('曲柄转角\theta_1/\circ')ylabel('角加速度/rad\cdots^{-2}')grid on;hold on;text(200,-0.5,'\alpha_4');%c点加速度图subplot(2,2,3);plot(i,ac,'r');title('加速度图');xlabel('曲柄转角\theta_1/\circ')ylabel('加速度/m\cdots^{-2}')grid on;hold on;text(200,150,'ac');%c点加速度图subplot(2,2,4);plot(i,aBe,'r');title('加速度图');xlabel('曲柄转角\theta_1/\circ')ylabel('加速度/m\cdots^{-2}')grid on;hold on;text(200,100,'Abe');%牛顿迭代法的函数定义function [r,ea,iter]=NEWTON(fun,x,x0,es,maxit)%定义函数名和输入输出的参数。