基于MATLAB的曲柄滑块机构仿真研究
基于matlab的曲柄滑块机构设计与运动分析_陈长秀
变,从第 i+1 个功能块开始逐位交换。
(3)变异运算的改进
由于在每个功能块中,“1”的数目即是该题型试题的数目, 因此在变异过程中应保证整个种群所有功能块中“1”的数目不 变。可执行如下过程,首先,由变异概率决定某位取反;然后,检 查、修正字符串中“1”的数目,保证不发生变化。
(4)用全局最优解替换本次迭代的最差解 为保证好的字符串不至于流失,每次遗传操作前记录本次 迭代的最优解,若该解优于全局最优解则替换全局最优解,否 则全局最优解保持不变。此次遗传操作后,用全局最优解换本 代的最差解。
(上接第 29 页)
图 1 所示的偏置曲柄滑块机构。设 l1=50mm,l2=100mm, e=20mm,w1=2rad/s,设 φ1 的初始值为 0 , 则 φ1 变化时,杆 2 的角位移、角速度和角加速度以及滑块 3 的位移、速度和加速
>> plot(t,xc,t,vc,t,ac);
度的变化值可计算求得,曲柄转角 φ1 在 0- 360°之间变化时, 在 matlab 的计算窗口输入算式后,滑块 3 的位移、速度和加速
2012 年 1 月 第 1 期(总第 158 期)
轻工科技
LIGHT INDUSTRY SCIENCE AND TECHNOLOGY
机械与电气
基于 m a tla b 的曲柄滑块机构设计与运动分析
陈长秀
(陕西国防工业职业技术学院,陕西 西安 71 0302)
【摘 要】 建立了曲柄滑块机构的计算模型,并使用 matlab 对曲柄滑块机构进行了运动分析,提高了设计效率和设计精度。
图 1 偏置曲柄滑块机构 建立坐标系如图 1 所示,由曲柄滑快机构的矢量封闭图[1] 可得:
φl1 cosφ1+l2 cosφ2=xc
matlab机电系统仿真大作业
一曲柄滑块机构运动学仿真1、设计任务描述通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。
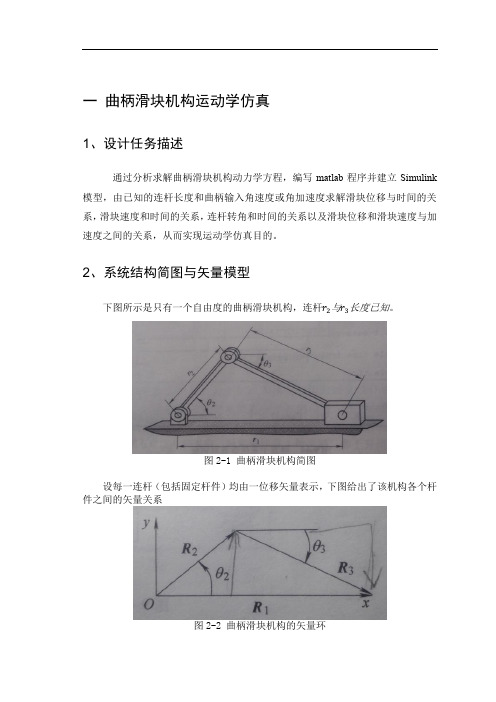
2、系统结构简图与矢量模型下图所示是只有一个自由度的曲柄滑块机构,连杆r2与r3长度已知。
图2-1 曲柄滑块机构简图设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系图2-2 曲柄滑块机构的矢量环3.匀角速度输入时系统仿真3.1 系统动力学方程系统为匀角速度输入的时候,其输入为ω2=θ2,输出为ω3=θ3,θ3;v 1=r 1,r 1。
(1) 曲柄滑块机构闭环位移矢量方程为:R 2+R 3=R 1(2) 曲柄滑块机构的位置方程{r 2cos θ2+r 3cos θ3=r 1r 2sin θ2+r 3sin θ3=0(3) 曲柄滑块机构的运动学方程通过对位置方程进行求导,可得{−r 2ω2sin θ2−r 3ω3sin θ3=r 1r 2ω2cos θ2+r 3ω3cos θ3=0由于系统的输出是ω3与v 1,为了便于建立A*x=B 形式的矩阵,使x=[ω3v 1],将运动学方程两边进行整理,得到{v 1+r 3ω3sin θ3=−r 2ω2sin θ2−r 3ω3cos θ3=r 2ω2cos θ2将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式(r 3sin θ31−r 3cos θ30)(ω3v 1)=(−r 2ω2sin θ2r 2ω2cos θ2) 3.2 M 函数编写与Simulink 仿真模型建立3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况仿真的基本思路:已知输入w2与θ2,由运动学方程求出w3和v1,再通过积分,即可求出θ3与r1。
基于MATLAB曲柄滑块机构运动仿真
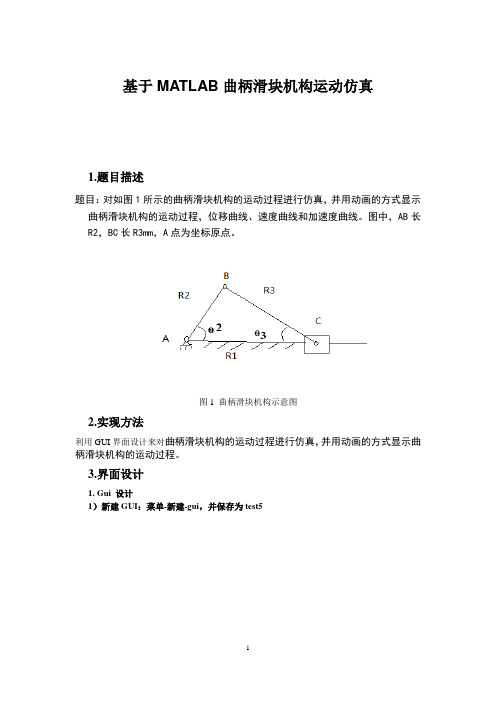
基于MATLAB曲柄滑块机构运动仿真1.题目描述题目:对如图1所示的曲柄滑块机构的运动过程进行仿真,并用动画的方式显示曲柄滑块机构的运动过程,位移曲线、速度曲线和加速度曲线。
图中,AB长R2,BC长R3mm,A点为坐标原点。
图1 曲柄滑块机构示意图2.实现方法利用GUI界面设计来对曲柄滑块机构的运动过程进行仿真,并用动画的方式显示曲柄滑块机构的运动过程。
3.界面设计1. Gui 设计1)新建GUI:菜单-新建-gui,并保存为test52)界面设计:拖拽左侧图标到绘图区,创建GUI界面拖拽左侧图标值绘图区设置如下的按钮最终的仿真界面如图所示3)代码添加:进入代码界面4.代码编程%模型求解a1=str2double(get(handles.edit1,'String'));a2=str2double(get(handles.edit2,'String'));a3=str2double(get(handles.edit3,'String'));a4=str2double(get(handles.edit4,'String'));a5=str2double(get(handles.edit5,'String'));a=a1*((1-cos(a4*a5))+0.25*(a1/a2)*(1-cos(2*a4*a5))); set(handles.edit6,'String',a);a0=(a4*a1)*(sin(a4*a5)+0.5*(a1/a2)*sin(2*a4*a5));set(handles.edit7,'String',a0);a6=(a4*a4*a1)*(cos(a4*a5)+(a1/a2)*cos(a4*a5));set(handles.edit8,'String',a6);%绘制位移、速度、加速度曲线axes(handles.axes3);r1=str2double(get(handles.edit1,'String'));r2=str2double(get(handles.edit2,'String'));omiga1=str2double(get(handles.edit4,'String'));x11=1:720;for i=1:720x1(i)=i*pi/180;%sin(x2(i)=r1/r2*sin(x1(i));x2(i)=asin(-r1/r2*sin(x1(i)));x22(i)=x2(i)*180/pi;r3(i)=r1*cos(x1(i))+r2*cos(x2(i));B=[-r1*omiga1*sin(x1(i));r1*omiga1*cos(x1(i))];A=[r2*sin(x2(i)) 1;-r2*cos(x2(i)) 0];X=inv(A)*B;omiga2(i)=X(1,1);v3(i)=X(2,1);endplot(x11/60,0.5*r1*sin(x1));xlabel('ʱ¼äÖá t/sec')ylabel('Á¬¸ËÖÊÐÄÔÚYÖáÉϵÄλÖÃ/mm')figure(2)plot(x11/60,r3);title('λÒÆÏßͼ')grid onhold off;xlabel('ʱ¼ät/sec')ylabel('»¬¿éλÒÆ r3/mm')figure(3)plot(x11/60,omiga2);title('Á¬¸Ë½ÇËÙ¶È')grid onhold off;xlabel('ʱ¼ä t/sec')ylabel('Á¬¸Ë½ÇËÙ¶È omiga2/rad/sec') figure(4)plot(x11/60,v3*pi/180);title('»¬¿éËÙ¶È')grid onhold off;xlabel('ʱ¼ä t/sec')ylabel('»¬¿éËÙ¶È v3/mm/sec')%绘制表格axes(handles.axes3);grid onaxes(handles.axes1);grid on%制作动画axes(handles.axes1);hf=figure('name','Çú±ú»¬¿é»ú¹¹'); set(hf,'color','r');hold onaxis([-6,6,-4,4]);grid onaxis('off');xa0=-5;%»îÈû×󶥵ã×ø±êxa1=-2.5;%»îÈûÓÒ¶¥µã×ø±êxb0=-2.5;%Á¬¸Ë×󶥵ã×ø±êxb1=2.2;%Á¬¸ËÓÒ¶¥µã×ø±êx3=3.5;%תÂÖ×ø±êy3=0;%תÂÖ×ø±êx4=xb1;%ÉèÖÃÁ¬¸ËÍ·µÄ³õʼλÖúá×ø±êy4=0;%ÉèÖÃÁ¬¸ËÍ·µÄ³õʼλÖÃ×Ý×ø±êx5=xa1;y5=0;x6=x3;%ÉèÖÃÁ¬Öá³õʼºá×ø±êy6=0;%ÉèÖÃÁ¬Öá³õʼ×Ý×ø±êa=0.7;b=0.7c=0.7a1=line([xa0;xa1],[0;0],'color','b','linestyle','-','linewidth',40); %ÉèÖûîÈûa3=line(x3,y3,'color',[0.5 0.60.3],'linestyle','.','markersize',300);%ÉèÖÃתÂÖa2=line([xb0;xb1],[0;0],'color','black','linewidth',10);%ÉèÖÃÁ¬¸Ëa5=line(x5,y5,'color','black','linestyle','.','markersize',40);%ÉèÖÃÁ¬¸Ë»îÈûÁ¬½ÓÍ·a4=line(x4,y4,'color','black','linestyle','.','markersize',50);%ÉèÖÃÁ¬¸ËÁ¬½ÓÍ·a6=line([xb1;x3],[0;0],'color','black','linestyle','-','linewidth',10 );a7=line(x3,0,'color','black','linestyle','.','markersize',50);%ÉèÖÃÔ˶¯ÖÐÐÄa8=line([-5.1;-0.2],[0.7;0.7],'color','y','linestyle','-','linewidth' ,5);%ÉèÖÃÆû¸×±Úa9=line([-5.1;-0.2],[-0.72;-0.72],'color','y','linestyle','-','linewi dth',5);%ÉèÖÃÆû¸×±Úa10=line([-5.1;-5.1],[-0.8;0.75],'color','y','linestyle','-','linewid th',5);%ÉèÖÃÆû¸×±Úa11=fill([-5,-5,-5,-5],[0.61,0.61,-0.61,-0.61],[a,b,c]);%ÉèÖÃÆû¸×ÆøÌålen1=4.8;%Á¬¸Ë³¤len2=2.5;%»îÈû³¤r=1.3;%Ô˶¯°ë¾¶dt=0.015*pi;t=0;while 1t=t+dt;if t>2*pit=0;endlena1=sqrt((len1)^2-(r*sin(t))^2);%Á¬¸ËÔÚÔ˶¯¹ý³ÌÖкáÖáÉϵÄÓÐЧ³¤¶Èrr1=r*cos(t);%°ë¾¶ÔÚÔ˶¯¹ý³ÌÖкáÖáÉϵÄÓÐЧ³¤¶Èxaa1=x3-sqrt(len1^2-(sin(t)*r)^2)-(r*cos(t));%»îÈûÔÚÔ˶¯¹ý³ÌÖеÄÓÒ¶¥µã×ø±êλÖÃxaa0=xaa1-2.5;%%»îÈûÔÚÔ˶¯¹ý³ÌÖеÄ×󶥵ã×ø±êλÖÃx55=x3-cos(t)*r;%Á¬¸ËÔÚÔ˶¯¹ý³ÌÖкá×ø±êλÖÃy55=y3-sin(t)*r;%Á¬¸ËÔÚÔ˶¯¹ý³ÌÖÐ×Ý×ø±êλÖÃset(a4,'xdata',x55,'ydata',y55);%ÉèÖÃÁ¬¸Ë¶¥µãÔ˶¯set(a1,'xdata',[xaa1-2.5;xaa1],'ydata',[0;0]);%ÉèÖûîÈûÔ˶¯set(a2,'xdata',[xaa1;x55],'ydata',[0;y55]);set(a5,'xdata',xaa1);%ÉèÖûîÈûÓëÁ¬¸ËÁ¬½ÓÍ·µÄÔ˶¯set(a6,'xdata',[x55;x3],'ydata',[y55;0]);set(a11,'xdata',[-5,xaa0,xaa0,-5]);%ÉèÖÃÆøÌåµÄÌî³äset(gcf,'doublebuffer','on');%Ïû³ýÕð¶¯drawnow;end5.结果(1)对它的结构参数进行设置,如下图所示。
基于某MATLAB曲柄滑块机构运动仿真报告材料
************************计算机仿真技术matlab报告************************曲柄滑块机构目录一、基于GUI的曲柄滑块机构运动仿真二、基于simulink的曲柄滑块机构运动仿真曲柄滑块机构1.题目描述题目:对如图1所示的曲柄滑块机构的运动过程进行仿真,并用动画的方式显示曲柄滑块机构的运动过程,位移曲线、速度曲线和加速度曲线。
图中,AB长R2,BC长R3mm,A点为坐标原点。
图1 曲柄滑块机构示意图2.实现方法利用GUI界面设计来对曲柄滑块机构的运动过程进行仿真,并用动画的方式显示曲柄滑块机构的运动过程。
3.界面设计1. Gui 设计1)新建GUI:菜单-新建-gui,并保存为test52)界面设计:拖拽左侧图标到绘图区,创建GUI界面拖拽左侧图标值绘图区设置如下的按钮最终的仿真界面如图所示3)代码添加:进入代码界面4.代码编程%模型求解a1=str2double(get(handles.edit1,'String'));a2=str2double(get(handles.edit2,'String'));a3=str2double(get(handles.edit3,'String'));a4=str2double(get(handles.edit4,'String'));a5=str2double(get(handles.edit5,'String'));a=a1*((1-cos(a4*a5))+0.25*(a1/a2)*(1-cos(2*a4*a5))); set(handles.edit6,'String',a);a0=(a4*a1)*(sin(a4*a5)+0.5*(a1/a2)*sin(2*a4*a5));set(handles.edit7,'String',a0);a6=(a4*a4*a1)*(cos(a4*a5)+(a1/a2)*cos(a4*a5));set(handles.edit8,'String',a6);%绘制位移、速度、加速度曲线axes(handles.axes3);r1=str2double(get(handles.edit1,'String'));r2=str2double(get(handles.edit2,'String'));omiga1=str2double(get(handles.edit4,'String'));x11=1:720;for i=1:720x1(i)=i*pi/180;%sin(x2(i)=r1/r2*sin(x1(i));x2(i)=asin(-r1/r2*sin(x1(i)));x22(i)=x2(i)*180/pi;r3(i)=r1*cos(x1(i))+r2*cos(x2(i));B=[-r1*omiga1*sin(x1(i));r1*omiga1*cos(x1(i))]; A=[r2*sin(x2(i)) 1;-r2*cos(x2(i)) 0];X=inv(A)*B;omiga2(i)=X(1,1);v3(i)=X(2,1);endplot(x11/60,0.5*r1*sin(x1));xlabel('ʱ¼äÖá t/sec')ylabel('Á¬¸ËÖÊÐÄÔÚYÖáÉϵÄλÖÃ/mm') figure(2)plot(x11/60,r3);title('λÒÆÏßͼ')grid onhold off;xlabel('ʱ¼ät/sec')ylabel('»¬¿éλÒÆ r3/mm')figure(3)plot(x11/60,omiga2);title('Á¬¸Ë½ÇËÙ¶È')grid onhold off;xlabel('ʱ¼ä t/sec')ylabel('Á¬¸Ë½ÇËÙ¶È omiga2/rad/sec') figure(4)plot(x11/60,v3*pi/180);title('»¬¿éËÙ¶È')grid onhold off;xlabel('ʱ¼ä t/sec')ylabel('»¬¿éËÙ¶È v3/mm/sec')%绘制表格axes(handles.axes3);grid onaxes(handles.axes1);grid on%制作动画axes(handles.axes1);hf=figure('name','Çú±ú»¬¿é»ú¹¹');set(hf,'color','r');hold onaxis([-6,6,-4,4]);grid onaxis('off');xa0=-5;%»îÈû×󶥵ã×ø±êxa1=-2.5;%»îÈûÓÒ¶¥µã×ø±êxb0=-2.5;%Á¬¸Ë×󶥵ã×ø±êxb1=2.2;%Á¬¸ËÓÒ¶¥µã×ø±êx3=3.5;%תÂÖ×ø±êy3=0;%תÂÖ×ø±êx4=xb1;%ÉèÖÃÁ¬¸ËÍ·µÄ³õʼλÖúá×ø±êy4=0;%ÉèÖÃÁ¬¸ËÍ·µÄ³õʼλÖÃ×Ý×ø±êx5=xa1;y5=0;x6=x3;%ÉèÖÃÁ¬Öá³õʼºá×ø±êy6=0;%ÉèÖÃÁ¬Öá³õʼ×Ý×ø±êa=0.7;b=0.7c=0.7a1=line([xa0;xa1],[0;0],'color','b','linestyle','-','linewidth',40); %ÉèÖûîÈûa3=line(x3,y3,'color',[0.5 0.6 0.3],'linestyle','.','markersize',300);%ÉèÖÃתÂÖa2=line([xb0;xb1],[0;0],'color','black','linewidth',10);%ÉèÖÃÁ¬¸Ëa5=line(x5,y5,'color','black','linestyle','.','markersize',40);%ÉèÖÃÁ¬¸Ë»îÈûÁ¬½ÓÍ·a4=line(x4,y4,'color','black','linestyle','.','markersize',50);%ÉèÖÃÁ¬¸ËÁ¬½ÓÍ·a6=line([xb1;x3],[0;0],'color','black','linestyle','-','linewidth',10);a7=line(x3,0,'color','black','linestyle','.','markersize',50);%ÉèÖÃÔ˶¯ÖÐÐÄa8=line([-5.1;-0.2],[0.7;0.7],'color','y','linestyle','-','linewidth',5);%ÉèÖÃÆû¸×±Úa9=line([-5.1;-0.2],[-0.72;-0.72],'color','y','linestyle','-','linewidth',5);%ÉèÖÃÆû¸×±Úa10=line([-5.1;-5.1],[-0.8;0.75],'color','y','linestyle','-','linewidth',5);%ÉèÖÃÆû¸×±Úa11=fill([-5,-5,-5,-5],[0.61,0.61,-0.61,-0.61],[a,b,c]);%ÉèÖÃÆû¸×ÆøÌålen1=4.8;%Á¬¸Ë³¤len2=2.5;%»îÈû³¤r=1.3;%Ô˶¯°ë¾¶dt=0.015*pi;t=0;while 1t=t+dt;if t>2*pit=0;endlena1=sqrt((len1)^2-(r*sin(t))^2);%Á¬¸ËÔÚÔ˶¯¹ý³ÌÖкáÖáÉϵÄÓÐЧ³¤¶Èrr1=r*cos(t);%°ë¾¶ÔÚÔ˶¯¹ý³ÌÖкáÖáÉϵÄÓÐЧ³¤¶È xaa1=x3-sqrt(len1^2-(sin(t)*r)^2)-(r*cos(t));%»îÈûÔÚÔ˶¯¹ý³ÌÖеÄÓÒ¶¥µã×ø±êλÖÃxaa0=xaa1-2.5;%%»îÈûÔÚÔ˶¯¹ý³ÌÖеÄ×󶥵ã×ø±êλÖà x55=x3-cos(t)*r;%Á¬¸ËÔÚÔ˶¯¹ý³ÌÖкá×ø±êλÖÃy55=y3-sin(t)*r;%Á¬¸ËÔÚÔ˶¯¹ý³ÌÖÐ×Ý×ø±êλÖÃset(a4,'xdata',x55,'ydata',y55);%ÉèÖÃÁ¬¸Ë¶¥µãÔ˶¯set(a1,'xdata',[xaa1-2.5;xaa1],'ydata',[0;0]);%ÉèÖûîÈûÔ˶¯set(a2,'xdata',[xaa1;x55],'ydata',[0;y55]);set(a5,'xdata',xaa1);%ÉèÖûîÈûÓëÁ¬¸ËÁ¬½ÓÍ·µÄÔ˶¯set(a6,'xdata',[x55;x3],'ydata',[y55;0]);set(a11,'xdata',[-5,xaa0,xaa0,-5]);%ÉèÖÃÆøÌåµÄÌî³äset(gcf,'doublebuffer','on');%Ïû³ýÕð¶¯drawnow;end5.结果(1)对它的结构参数进行设置,如下图所示点击计算按钮动画,结果如下图所示点击表格对图形进行画表格处理点击绘图,即可得到位移、速度、加速度曲线,如下图所示二、基于simulink 的曲柄滑块机构运动仿真(1)运用矢量求解法求解(2)绘制速度接线图,如下图所示:运动仿真结果如下图:(3)绘制加速度接线图,如下图所示:运行结果如图所示:。
基于MATLAB的曲柄滑块机构运动仿真
AbstractSlider-crank mechanism plays a significant role in the mechanical manufacturing areas. The slider crank mechanism is a particular four-bar mechanism that exhibits both linear and rotational motion simultaneously. It is also called four-bar linkage configurations and the analysis of four bar linkage configuration is very important. In this paper four configurations are taken into account to synthesis, simulate and analyse the offset slider crank mechanism. Mathematical formulae are derived for determining the lengths of the crank and connecting rod; the kinematic and dynamic analyses of the positions, velocities and accelerations of the links of the offset slider crank and the forces acting on them leading to sparse matrix equation to be solved using MATLAB m-function derived from the analysis; the simulation of the model in Simulink and finally, the simulation results analysis. This program solves for all the unknown parameters and displays those results in graphical forms.曲柄滑块机构在机械制造领域发挥着重要的作用。
曲柄滑块机构的优化设计及运动仿真学位论文
曲柄滑块机构的优化设计及运动仿真学位论文曲柄滑块机构的优化设计及运动仿真目录目录...............................................................1 摘要............................................................... 第1章绪论........................................................ 选题的目的及意义............................................. 优化设计方法的概述........................................... 国内外的研究现状............................................ 主要研究内容............................................ 第2章曲柄滑块机构的受力分析......................................曲柄滑块机构的分类...........................................曲柄滑块机构的动力学特性.....................................曲柄滑块机构中运动学特性..................................... 第3章偏置式曲柄滑块机构的优化设计................................ 优化软件的介绍.............................................. MATLAB的发展历程和影响...................................MATLAB 在机构设计中的应用................................. 机构优化设计实例分析........................................ 设计目标的建立...........................................根据设计要求,确定约束条件................................利用MATLAB进行优化设计.................................... 编制优化程序.............................................. 程序运行结果及处理........................................ 对优化结果进行验证和分析................................. 第4章偏置曲柄滑块机构的运动学建模与仿真.......................... 偏置曲柄滑块机构运动特性建模................................ 仿真环境简介............................................. 机构的运动学建模........................................ 运动学仿真的实现.......................................... 函数的编制及初始参数的设定............................... 构建Simulink仿真框图.................................... 对仿真结果进行分析...................................... 总结...............................................................〔Toolboxs〕组成虽然该软件的初衷并不是为控制系统设计的,但它提供了强大的矩阵处理和绘图功能,可靠灵活且方便,非常适合现代控制理论的计算机辅助设计。
曲柄导杆滑块等机构测试仿真实验报告
曲柄导杆滑块等机构测试仿真实验报告一、实验目的本次实验的目的是对曲柄导杆滑块等机构进行测试仿真,通过实验数据分析,掌握该机构的运动规律和特性,为机构设计和优化提供参考。
二、实验原理曲柄导杆滑块等机构是一种常见的机械传动装置,其主要由曲柄、连杆、导杆和滑块等部件组成。
在运动过程中,曲柄带动连杆运动,使导杆产生往复直线运动,从而驱动滑块完成工作。
三、实验器材本次实验所使用的器材包括:计算机、SolidWorks软件、Matlab软件。
四、实验步骤1.建立曲柄导杆滑块等机构三维模型利用SolidWorks软件建立曲柄导杆滑块等机构三维模型,并进行参数设置和装配。
2.进行运动分析利用SolidWorks Motion模块对该机构进行运动分析,并得出相关数据。
3.进行力学分析利用Matlab软件对该机构进行力学分析,并得出相关数据。
4.比较分析结果将两种分析方法得到的数据进行比较和分析,掌握该机构的运动规律和特性。
五、实验结果1.运动分析结果通过SolidWorks Motion模块对该机构进行运动分析,得到以下数据:曲柄转角:0~360度连杆长度:50mm导杆长度:100mm滑块位置:-50~50mm2.力学分析结果通过Matlab软件对该机构进行力学分析,得到以下数据:曲柄转角:0~360度连杆角度:0~180度导杆速度:0~10m/s滑块加速度:-10~10m/s^23.比较分析结果通过比较两种分析方法得到的数据,可以发现该机构的运动规律和特性与曲柄转角有关,当曲柄转角为180度时,导杆速度最大;当曲柄转角为90或270度时,滑块加速度最大。
此外,连杆角度与导杆速度呈正比关系。
六、实验结论通过本次实验可以得出以下结论:1.曲柄导杆滑块等机构的运动规律和特性与曲柄转角、连杆角度等参数有关。
2.该机构在不同工况下具有不同的性能表现,需要根据具体情况进行优化设计。
3.利用SolidWorks Motion模块和Matlab软件可以对该机构进行运动分析和力学分析,为机构设计和优化提供参考。
基于MATLAB的曲柄滑块机构运动的仿真
基于MATLAB 的曲柄滑块机构运动的仿真摘要:本文在曲柄滑块机构运动简图的基础上,对其数学运动模型进行分析,用解析法计算曲柄的转角和角速度,及滑块的位移和速度,并用MATLAB软件进行仿真。
1引言在机械传动系统中,曲柄滑块机构是一种常用的机械机构,它将曲柄的转动转化为滑块在直线上的往复运动,是压气机、冲床、活塞式水泵等机械的主机构。
这里用解析法,并用MATLAB对其进行仿真。
2曲柄滑块机构的解析法求解曲柄滑块机构的运动简图如图1所示,在图1中,L i、L2和e分别为曲柄滑块的曲柄、连杆和偏差,‘、2分别为曲柄和连杆的转角,「:、「:分别为曲柄和连杆的角速度,S为滑块的位移。
(1)块的位移S 和速度S2.1位移分析按图1中四边形ABCD 的矢量方向有:AB =CD将上式转化成幅值乘以角度的形式,得到如下等式:L :e 闻十=S + ie分别取上式的虚部和实部,并在 e 前面乘N , N 取值1或—1,用以表示滑 块在x 轴的上方或者下方,得到下面两式:,以及滑L cos 1 L 2cos 2 = S (2) L sin 1 L 2sin 2 = Nb(3)整理上面两个公式得到S 和:2的计算公式:S 二 L i cos 1 L 2 cos 22.2速度分析将(1)式两边对时间求导得(6)式L i -'i ie i 1- L 2 \ ie i 2= S(6)取(6)式的实部和虚部,整理得 S 和:2的计算公式:■L 1 ;*1cos12 ■L 2 COS ®2根据(7)式和(8)式即可得到滑块的速度及连杆的角速度。
2.3实例分析及其MATLAB 仿真 2.3.1实例分析下面对图2所示的曲柄滑块机构做具体分析。
图2曲柄滑块机构简图*二 arcs inNe - L 1 sin 打L2(5)S 「:L i sin (—2)cos :2yx例中:几=36mm,r2=140mm,^60d /sec,求'2,2,S 和S。
曲柄滑块机构的MATLAB仿真_陈德为
;
om ega1
-
ω 1
;
om ega_2
-
ω 2
;
the ta1
- θ1 ;
the ta2
-
θ 2
;
以下同 ) 。
图 2 曲柄匀角速运动时 S im ulink仿真模型
F ig. 2 S im ulink sim ula tion m odel of the brace
hom ogeneous angle speed sport
- l1α1 sinθ1 - l1ω21 co θs 1 - l2α2 sinθ2 + - l2ω22 co θs 2 = l0
(6) l1α1 co sθ1 - l1ω21 sinθ1 + l2α2 co sθ2 + - l2ω22 sinθ2 = 0
(7)
写成如下矩阵形式得 :
l2 sinθ2
1
角速度
ω 2
的仿真曲线如图
5 ( a)
所示 。滑块
m
的位移仿真曲线如图 5 ( b) 所示 ,加速度仿真曲线如
图 5 ( c) 所示 。
从仿 真 曲 线 可 以 看 出 ,
当曲柄以
α 1
=8
rad / s2 (仿真初 始条 件 :θ1
=
θ 2
= 0 rad、l0
= 150
mm、ω1 =ω2 = 0 rad / s、l0 = 0 mm / s。) 作匀角加速
2曲柄滑块机构的匀角速度运动学仿211匀角速度输入时曲柄滑块机构的simulink仿真模型曲柄连杆机构曲柄以速度运动这是除草机单缸发动机的正常工作速主要研究在这一输入作用下的曲柄连杆机构连杆的运动角速度变化规律以及滑块的位移速度的变化规律
MATLAB的曲柄滑块和四杆机构的综合设计说明
《计算机仿真技术》课程设计报告姓名:叶 / 浦合昀学号: 4/ 7专业班级:机械卓越141 指导教师:孝保2015年 6月目录1.仿真问题描述.........................................................................2.仿真问题数学模型.....................................................................3.Matlab实现方法 ......................................................................4.Matlab代码 ..........................................................................5.仿真结论.............................................................................6.遇到的问题和解决的方式...............................................................7.课程学习意见与建议...................................................................1.仿真问题描述已知机架AD 长为L1,曲柄AB 长为L2,连杆BC 长L3,另一机架长CD 长为L4,与AB 杆相连的是一滑块E 。
BE 杆长为L5,设计一个四杆加滑块的机构,其中L1-L5杆长可变。
并且可以通过输入的杆长,来判别,该机构到底可不可行。
L3L4 L2 L5L12.仿真问题数学模型(1)四杆机构的设计:在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于 MATLAB 的曲柄滑块机构仿真研究
陈杰平, 姚智华
(安徽科技学院 摘 工学院, 安徽 凤阳 233100)
要 : 曲柄滑块机构是各种机器装置中一种常用的传动机构。 然而 , 机构的运动学性能分析比较困难 ,
参考文献 : [ 1] 郑文纬 , 吴克坚 . 机械原理 [M ]. 北京 : 高等教育出版社 , 2004 . 33- 103. [ 2] [ 美 ] 约翰 . F. 加得纳 . 机构动态 仿真 2002. [ 3] [ 美 ] Edward B. M ag rab 等 . M ATLA B 原理与工程应用 [ M ]. 高会生 , 等译 . 北京 : 电子工业出版社 , 2002 . 125- 139. [ 4] 张森、 张正亮 . M ATLAB 仿真技术与 实例应用教程 [M ]. 北京 : 机械工业出 版社 , 2004 . [ 5] 张葛祥、 李娜 . M ATLAB 仿真技术与 应用 [M ]. 北京 : 清华大学出版社 , 2003 . 55- 83 . ( 责任编辑 : 李 孟良 ) 使用 M ATLA B 和 SI M UL I NK [M ]. 周进 雄 , 等译 . 西安 : 西 安交通 大学 出版社 ,
难以在机构设计完成之后准确判定其性能 。借助于功能强大的分析仿真软件 MATLAB, 可以方便的实现 机构性能分析和动态仿真 , 降低分析的难度, 有效提高设计工作效率、 产品开发质量, 降低开发成本。 关键词 : 曲柄滑块机构 ; 仿真 ; MATLAB 中图分类号 : TP 311 . 25 文献标识码: A 文章编号 : 1672- 3589( 2005) 04- 0031- 04
cos 2 - r2
sin 2 + r3
sin 3 - r3
sin 3 = 0
当确定曲柄 2 为主动件、 滑块为工作输出部件后, 对上式移项整理可以得到其数学模型的矩阵方程: r3 sin
3
1 0
3
- r3 cos 3
= r1
- ( r2 r2
2
2
sin 2 + r2
2
2 2
cos 2 + r3
2 3
w 2 = 11 . 8707( rad / s) ; a= 181 . 8755( m / s ) ; v = 5 . 0402( m / s) ; 同样的方法 , 我们也可以按照曲柄匀速稳定运转的情况设定各参数进行仿真。
2
3 结论
MATLAB 软件具有很强的运算仿真功能 , 是目前国际工程界广泛采用的系统分析与仿真软件已经渗 透到各个行业, 成为现代工程技术人员必须掌握的工具。借助于该软件可以极大地降低对系统性能分析 的难度 , 轻松完成机构、 性能分析和动态仿真等工作。可以提高新产品设计水平, 降低成本。本文对曲柄 滑块机构的运动性能分析方法 , 对进行其它机构的仿真、 分析也具有一定的参考应用价值。
34
安徽技 术师范学院学报
2005 年
图 4 滑块加速度仿真曲线 F ig . 4 Si m u la tion curve of slider s ' acce leration
图 5 滑块速度和连杆角速度仿 真曲线 F ig . 5 Si m ulation curve o f slider s ' veloc ity & link s ' ang le ve loc ity
2 2 1
恒为零 ) : ( 2) ( 3) = 0 时, r1 = r2 + r3,
3
=0。 ( 4) ( 5)
将式 ( 2) 和 ( 3) 对时间进行一、 二次求导 , 可以得到其运动方程为 :
2
sin 2 - r2
2 2
2 2
cos 2 - r3
3
3
sin 3 - r3
2 3
2 3
cos 3 = r1
第 19 卷第 4 期
陈杰平 , 等
基于 MAT LAB 的曲柄滑块机构仿真研究
33
图 2 仿真框图 F ig . 2 T he diag ram o f si m ulation
然后根据仿真要求设定各环节的初始参数 , 即可以对机构进行运动学仿真分析。 其中 Scope 可以显示所有运动参数变化曲线, 直接观察。也可以将其仿真结果以数据文件的形式存 放在工作台 , 然后利用 MAT LAB 的 plot命令根据需要绘制曲线。下面以实例来说明仿真的过程和步骤。 2 . 3 仿真的实现 初始参数值的设定需要根据具体的要求进行。例如 , 已知曲柄 r2= 100mm, 连杆 r3= 400mm; 初始位 2 置为曲柄和两杆展开共线 ; 曲柄由静止开始作匀加速转动 , 2 = 10rad / s 。可以设定初始条件为: constan = 10 ,
2 2
+ cos 2 + r3
3 2
2 3 3
cos 3 )
cos 2 - r2
cos 2 - r2
sin 2 - r3
sin
( 6)
2 编程与仿真
[2 、 3 、 4 、 5]
利用 MATLAB 进行仿真分析 , 主要包括两个步骤 : 首先编制计算所需的函数模块, 然后利用其仿真工 具箱 S i m u link 建立仿真系统框图, 设定初始参数进行仿真分析。 2 . 1 计算函数编制 进行仿真分析, 第一步工作就是根据建立的数学模型, 进行功能运算函数的编制。编制计算函数 ac ccalcu late . m 如下 : function [ x ] = acccalcu late( u) % u( 1) = 2, 即曲柄的角加速度 % u( 2) = % u( 3) = % u( 4) =
32
安徽技 术师范学院学报
2005 年
图 1 数学模型 F ig. 1 M athema ticsM odel
可以建立其矢量方程表达式为: R 2 + R3 = R1 ( 1) 建立如图所示的笛卡儿平面坐标系。规定如图所示的角度为正值。从而可以得到矢量方程的两个分 量表达式 (坐标系与 R1 重合 , 故 r2 cos 2 + r3 cos 3 = r1 r2 sin 2 + r3 sin 3 = 0 当机构确定后其曲柄和连杆的长度已经确定。满足当 - r2 r2
图 3 示波器显示仿真曲线 F ig. 3 The cu rve of si m u lation in the scope
同样可以键入连杆角速度和滑块速度曲线 : p lot( tou, t si m out( : , 2) , tou, t si m out( : , 5) ) 绘制仿真曲线如图 5所示 ( 波动大者为连杆加速度曲线 ) 。 利用仿真得到各变量的响应曲线 , 就可以对机构作出大概的评价。但是为了更加准确评价机构的运 动学特性, 我们常常更加关心各变量的极值大小, 可以使用 MATLAB 的 m ax 命令求出。 在命令行键入: w 2= m ax( si m ou t( : , 2) ) ; a= m ax ( si m out(: , 4) ), v= m ax( si m out( : , 5) ) 即可得到 :
2 3
, 即曲柄 2的角速度
, 即连杆 3的角速度 2, u( 5) = 3 % 给定曲柄和连杆长度, 以 mm 为单位
r2= 100 ; r3= 400 ;
% 以下为根据数学模型列写的计算公式 a= [ r3 * sin ( u( 5) ) 1 ; - r3 * cos( u( 5) ) 0] ; b= [ - ( r2 * u( 1)* sin( u( 4) ) + r2 * u( 2) ^2* cos( u( 4) ) + r3 * u( 3) ^2 * cos( u( 5) ) ); r2 * u( 1)* cos( u( 4) ) - r2 * u( 2) ^2 * sin ( u( 4) ) - r3 * u( 3) ^2 * sin ( u( 5) ) ]; x= inv( a) * b; % 矩阵计算 2 . 2 系统仿真框图 进入 MATLAB, 在命令栏中键入 Si m u link 进入仿真界面 , 建立仿真系统框图如图 2 所示。
1 系统模型建立
[1 、 2]
为 了对机构进行运动仿真分析 , 首先必须建立机构的数学模型 MATLAB 仿真分析工具箱 S i m ulink 对其进行仿真分析。 对于任何的曲柄滑块机构都可以建立模型如图 1所示。
收稿日期 : 2005- 02- 28
即位置方程 , 然后利用强大的
作者简介 : 陈杰平 ( 1963- ) , 男 , 河南省巩义市人, 硕士 , 讲师 , 主要从事机械 CA D /CAM 和控制方向的教学与研究。
2
= 0 ,
3
= 0 ,
2
= 0 ,
3
= 0 , r1 = 500mm, = 0 。仿真时间 t设定为 5秒。
运行仿真后双击 Scope 图标可以观察仿真结果 , 如图 3所示。 可以看出, 由于各参数的数量级差别很大 , 难以同时观察。为了全面分析曲线 , 可以采用两种方法观察 : 1) 调整示波器的坐标 2)利用 MATLAB 的 p lot绘图命令, 将相关的曲线单独绘制出来。 例如, 为了观察滑块的加速度变化曲线, 我们在 MATLAB 命令行键入 : plot( tou, t si m out( : , 4) ) , 绘制 出其加速度变化曲线如图 4 所示。
Study on the Si m ulation of Slider- C rank M echanis m s Based onMATLAB