大型船舶锚系多接触碰撞动力学分析研究
多船会遇的船舶智能避碰专家系统研究与仿真

入癸智姥蠢人类对外界事物识剐釉理解的感知能力、进行推理、联想和 学习的思维能力以及做出决策朔采取行动的反应能力所组成。人之所以有这 垡管熊t莛因为人有鲡谖,麓谈是謦熊豹核心,是箍渤社会发展的动力。
collision avoidance expert system,the frame of Multi-ship Collision Avoidance
Expert Simulation System is built.Finally,at the foundafion Visual Basic 6.0
the project,the opportune moment,the extent ofveer and the reversion ofcourse,
complete氇e auto-simulation ofMulti—ship Collision Avoidance.
Several representative models of Multi-ship Collision Avoidance are simulated.The test indicates that it can reflect real situation perfectly and has a
good result
Key words:Multi-ship method
’Thispap#is suppoaed bytheNationalNatural ScienceFoundationofChinaunderGrantNo,19782.52
2
武汉理工大学硕士学位论文
大型船舶码头双船系泊水动力分析及系泊方案设计研究

大型船舶码头双船系泊水动力分析及系泊方案设计研究
庄晓贞
【期刊名称】《珠江水运》
【年(卷),期】2024()10
【摘要】本文以上海外高桥船厂的170,000t散装货船为研究对象,开展两船并排系泊系统研究,通过对港口及周边环境要素的研究,构建船舶的水动力计算与解析模型,开展相应的水动力学分析与计算,给出锚碇布置方式。
本项目首先基于船体舾装数量的计算,给出一个简易的设计方案;其次,依据港口与船的护舷、锚缆配置、两船间缆索配置、锚缆预拉力等多方面的参数,对其进行数值模拟与分析,进而对其进行逐级优化,最后综合各因子的最佳组合,形成港口内两船并行系泊与港口防台风锚泊的通用设计方法。
在寻求最优的锚泊设计方法时,归纳出一套适合两艘船舶并列式锚泊系统,可用于港口两艘船舶共同锚泊,具有较强的抗台风能力。
【总页数】4页(P148-151)
【作者】庄晓贞
【作者单位】广东省航运规划设计院有限公司
【正文语种】中文
【中图分类】U66
【相关文献】
1.不同系泊模式LNG旁靠超大型FSRU系泊系统设计及水动力性能分析
2.基于AQWA的大型游船码头系泊水动力性能分析
3.大型船舶码头并排系泊水动力特性
4.大型无动力船舶码头系泊防台风安全研究
5.码头内大型船舶双船系泊方案研究
因版权原因,仅展示原文概要,查看原文内容请购买。
锚链坠落及碰撞的数值模拟

锚链坠落及碰撞的数值模拟王浩;李廷秋;李继先【摘要】Accidents of anchor chain dropping into the sea occur from time to time ,and it has a practi‐cal significance to analyse the integrity of the chain for salvage work .Based on mass‐spring model , line clash model in OrcaFlex software ,this paper analyses the falling process with focuses on the colli‐sion between links .It turns out that there is a strong correlation between collision stress and initial configuration of the chain .The greater the angle between the chain and sea bed ,the greater probabili‐ty of dangerous collision between links ,and the lager stress ofcollision .Additionally ,FEM software is used to simulate collision between two links ,which is a simplification of entire chain .By comparing the stress of two lin ks’ collision with those of multi‐link collision ,the reliability of the results of multi‐link collision is verified .%锚链脱落坠入海底的事故时有发生,分析锚链坠落后的完整性对打捞工作有实际的工程意义。
Review of Ship Slamming Loads and Responses

Review of Ship Slamming Loads and Responses Shan Wang;C. Guedes Soares
【期刊名称】《船舶与海洋工程学报(英文版)》
【年(卷),期】2017(016)004
【摘要】本文概述了对船舶结构的撞击研究。
这项工作着重于船体砰击,这是在船舶设计过程和评估船舶安全性时要考虑的最重要的猛击问题之一。
与船体砰击现象有关的研究主要有三个方面,a)撞击事件发生的地点和频率,b)撞击载荷的预测,c)撞击载荷引起的结构响应。
对每个方面使用的方法进行了回顾和评论,并给出了一些典型结果。
讨论了将航海分析和撞击负荷预测相结合的方法,以对波浪中船舶的船体撞击进行全局分析。
还讨论了猛击事件中的一些物理现象。
提出了对未来研究和发展的建议。
【总页数】19页(P427-445)
【作者】Shan Wang;C. Guedes Soares
【作者单位】Centre for Marine Technology and Ocean Engineering (CENTEC), Instituto Superior Técnico, Universidade de Lisboa, Lisboa 1049-001, Portugal;Centre for Marine Technology and Ocean Engineering (CENTEC), Instituto Superior Técnico, Uni versidade de Lisboa, Lisboa 1049-001, Portugal
【正文语种】英文
因版权原因,仅展示原文概要,查看原文内容请购买。
船舶拉锚试验仿真系统研究

船舶拉锚试验仿真系统研究陈宁;吴尚华【摘要】Based on hawse pipe design in ship construction in physical state of tensile anchor under test ,by tak-ing a 49 000 DWT product carrier as the research object , the tensile anchor experiment simulation is carried out , the science and feasibility of the simulation system is verified .The Solid Works software is used in the simulation system to implement the general method from design , modeling to simulation of the ship anchor , anchor chain , and the other standard parts .We established a database model , imported the ship stem model , and then assem-bled, added constraints and force , and simulated the tensile anchor test .%针对船舶建造中的锚链筒设计物理状态下的拉锚试验,以某49000 DWT成品油轮为研究对象,对其进行拉锚试验仿真,验证仿真系统的科学性和可行性。
该仿真系统运用Solid Works软件实现从设计、建模到仿真的一般方法,对船舶锚以及锚链等标准件建立数据库模型,导入或者建立船艏模型,然后装配,添加约束力,进行拉锚试验仿真。
船舶动力学及系统建模研究
船舶动力学及系统建模研究船舶动力学是研究船舶在各种外界作用下的运动规律以及驱动力和阻力之间的关系。
在船舶动力学中,最基本的运动方程是牛顿第二定律,即物体受力等于质量乘以加速度。
对于船舶来说,其运动情况由位置、速度和加速度来描述。
船舶在水中运动时受到的作用力包括推进力、阻力、浮力和重力等。
而推进力和阻力则是船舶动力学研究的重点之一舵机系统是指舵机作为控制船舶转向的装置,其主要是通过舰艇自动控制系统的控制系统和元器件的相互作用来实现船体的方向操纵的。
现代化的舵机系统包括电控舵机系统和电液舵机系统等。
电控舵机系统通过电子设备来实现控制,具有响应速度快、控制精度高等特点。
而电液舵机系统则利用液压传动来实现船舶转向,其控制精度和可靠性都相对较好。
船舶的自动控制也是船舶动力学研究的重要内容。
船舶自动控制涉及到舵机系统、推进系统、舵轮位置等多个因素。
船舶自动控制的目的是提高船舶的操纵性能、降低人工操作的难度,使船舶能够更加安全、高效地运行。
船舶系统建模是为了深入了解船舶的运行机理和性能特点,进行仿真分析和控制系统设计。
船舶系统建模一般包括几个步骤:首先是对船舶的运动进行建模,得到运动方程;然后是对舵机系统、推进系统等进行建模,得到相应的数学模型;最后是将这些模型整合在一起,构建出描述整个船舶动力学行为的综合模型。
在船舶系统建模中,常用的方法包括基于物理原理的白化法、基于实验数据的灰化法、基于系统辨识的黑化法等。
这些方法都可以通过采集船舶运行数据、进行实验测试等手段,从不同的角度对船舶进行分析和建模。
总结起来,船舶动力学及系统建模涉及到船舶运动方程、舵机系统、推进系统、自动控制等多个方面的研究内容。
通过对船舶动力学和系统建模的研究,可以深入了解船舶运动规律和控制机理,为船舶的设计和运行优化提供理论支持。
船用锚机、绞缆机的运行特点及起锚过程受力分析

船用锚机、绞缆机的运行特点及起锚过程受力分析锚机、系缆机械是船舶必须配备的重要甲板机械,它们主要用来使船舶安全地停泊于锚地或系泊于码头及浮筒上。
锚机与绞缆机的形式根据船舶类型及布置有多种多样,如卧式锚机带系缆滚筒)立式锚机、立式绞机缆和卧式绞缆机等。
有些船舶锚机、绞缆机为电力拖动,称为电动锚机和电动绞缆机,而电动锚机和绞缆机又分为直流和交流拖动两种类型,其控制方式一般都与本船的电动起货机的控制方式基本相同。
目前,大多采用交流三速锚机和绞缆机,或者采用GM系统锚机和绞缆机,但两者拖动控制系统大体是相同的。
现代大型船舶及工程船舶由于其功率较大,因此,采用液压传动系统,即采用的是电动液压锚机和绞缆机。
一般船用锚机均采用锚链作为锚的系索但锚链非常笨重粗大,所以不可能将它缠绕在滚筒上,而是通过链轮的传动,用专门的锚链舱收放,此类称为航行锚机。
而用于某些工程船舶的锚机(如打捞船、救生船的定位锚机、海洋调查船的深水锚机),由于其锚链特别长,体积大而改用钢缆,故采用卧式绞缆起锚机。
一般的航行锚机均采用锚及锚链的重力进行自由落体抛锚,自动抛锚时,利用锚机上的手动带式制动器来控制抛锚的速度。
深水锚机由于钢缆不宜频繁承受手动制动力的冲击,而且深度大时速度快,手动控制器不易控制,所以采用电动抛锚,此时电动机是处于制动状态运行。
航行锚机起锚时,先是收起躺在海底的锚链和悬着的锚链,靠拉力(主要克服惯性力)使船舶移动,逐渐将锚链拉直,最后在船舶移动惯性力和电动机的最大力矩的作用下,使锚破土后把锚收进锚链孔,全部起锚过程见下图。
如果遇到仅依靠电动机拖动不能破土起锚时,也可开动主机,借助螺旋桨推力来破土起锚。
深水锚机的起锚过程与航行起锚过程基本相同。
当水深大于锚链长度时,其起锚状态称为应急起锚。
船舶对锚机有一定的技术要求,如抛两只锚情况,当起锚时要求在双锚依次破土后在一定深度(规范规定80m)处锚机应能同时收起双锚。
图中第I阶段为收起躺在海底的锚链阶段,锚链的拉力是不变的;第Ⅱ阶段随着悬链形状的改变,拉力变大,直到锚破土;第Ⅲ阶段为锚破土;第Ⅳ阶段为收锚出水,随着锚链长度减小,拉力成正比减小;图中第V阶段,称为收锚入孔,是将锚拉入并紧固于锚链孔中。
机械工程中的船舶动力学分析与设计

机械工程中的船舶动力学分析与设计船舶动力学是机械工程领域中一个重要的研究方向,它涉及到船舶的运动、推进力、阻力等各个方面。
在船舶设计和运营过程中,船舶动力学的分析与设计起着至关重要的作用。
本文将从船舶动力学的基本原理、分析方法以及设计应用等方面进行探讨。
首先,船舶动力学的基本原理是研究船舶在水中运动的力学规律。
船舶的运动受到多种力的作用,其中最重要的是推进力和阻力。
推进力是指船舶通过推进器产生的向前的力,而阻力则是船舶在水中运动时所受到的阻碍力。
推进力和阻力之间的平衡关系决定了船舶的速度和能耗。
通过对船舶动力学的研究,可以优化船舶的设计,提高船舶的运行效率。
其次,船舶动力学的分析方法主要包括实验研究和数值模拟两种。
实验研究是通过在实验室或者实际船舶上进行测试和观测,获取相关的数据和参数。
这些数据和参数可以用来验证数值模拟的结果,也可以用来进行船舶设计的参考。
数值模拟则是通过数学建模和计算机仿真来模拟船舶在水中的运动。
这种方法可以更加灵活地探索不同的设计方案,快速评估其性能和可行性。
在船舶动力学的设计应用方面,有许多重要的研究课题。
其中之一是船舶推进系统的设计。
船舶推进系统包括主机、推进器、传动系统等多个组成部分。
通过分析船舶的工况和运行要求,可以确定合适的主机功率、推进器类型和传动比例,从而实现船舶的高效推进。
另一个重要的课题是船舶阻力的降低。
船舶阻力是船舶在水中运动时所受到的阻碍力,它直接影响船舶的速度和能耗。
通过优化船体形状、减少阻力系数等手段,可以降低船舶的阻力,提高船舶的运行效率。
此外,船舶动力学还涉及到船舶的稳性和操纵性等问题。
船舶的稳性是指船舶在水中运动时的平衡性和稳定性。
通过分析船舶的稳性特性,可以确定合适的船舶结构和布局,确保船舶在复杂的海况下依然保持稳定。
船舶的操纵性是指船舶在水中进行转向和操纵的能力。
通过分析船舶的操纵性能,可以确定合适的舵型和操纵系统,提高船舶的操纵灵活性和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d g e F ·g +s t e p ( g , 0 , 0 , d , c ) · ( 1 ) n =k m a x m a x d t 式中: g 为两碰撞物体之间的初始距离和碰撞过程 d g 中实际距离的差值, 即压缩量; 为碰撞过程中两 d t 个物体之间的相对速度; e 为碰撞力指数; c m a x为最大 阻尼系数; d k 为刚 m a x 为阻尼达最大时的切入深度; 度系数. 1 2 模型求解参数的设置 为了得到较为精确的仿真效果, 在拉锚仿真中, 各部件之间的约束关系主要是以接触力来定义. 因 此能否准确定义接触力的各项参数将直接影响仿真 结果的可靠性. 除此以外, 求解器的设置以及仿真步 数和仿真时间等参数的设置对于求解精度、 稳定性
1 ) 接触力参数的定义 A D A M S 中I m p a c t 函数法描述的接触力模型是 一种非线性弹簧一阻尼模型. 由接触力模型分析可 知, 这种模型中接触力的定义涉及到几个基本参数: 刚度系数、 阻尼系数、 碰撞指数和阻尼系数达到最大 时的切入深度 d . 由于 A D A M S 中采用的接触判断准
A n a l y s i s a n ds t u d yo f mu l t i p l ec o n t a c t d y n a mi c s b a s e d o nl a r g es h i pa n c h o rs y s t e m
Wa n gL i h u i , L i Y i n g h a o ,L i uZ h i q i a n g
3 1 8
江苏科技大学学报( 自然科学版)
2 0 1 3年
连续变化过程. 后者是一种非线性弹簧—阻尼模型, 涉及参数较多, 在某种程度上能够较真实地模拟出 接触碰撞过程
[ 7 ]
0 0 0N s / m m . 切入深度可在 锚系 碰 撞 仿 真 中 取 1 0 0 0 1 ~ 0 1 m m之间取值, 越小越好, 但考虑到 A D A M S 数值收敛性, 一般取默认值 0 0 1 m m . 2 ) 求解器设置 求解器主要涉及到积分器、 积分格式和积分误 关于积分器、 积分格式、 积分误差的特性描述可 差. 参考文献[ 1 1 ] . 在拉锚碰撞仿真中, 积分器选择 A D A M S 默认的 G S T I F F积分器; 积分格式选择 S I 2 ; 积 分误差维持默认值 0 0 0 0 1 . 3 ) 仿真步数和仿真时间 适当增大仿真步数可以提高求解稳定性, 但同 时会增加仿真时间, 根据经验, 在锚系仿真中, 仿真 步数取 1 0 0 0 较为合适. 由于锚系部件之间添加的碰撞力较多, 碰撞复 杂, 根据不同的拉锚速度, 从锚系装配的初始位置到 锚爪成功贴合的仿真时间在 6 ~ 1 2 s 之间, 当仿真时 间较长时,将产生很多中间结果, 这些结果驻留在 计算机内存中, 引起刷新不正常, 导致接触判断的失
大型船舶锚系多接触碰撞动力学分析研究
王黎辉,李英豪,刘志强
( 江苏科技大学 机械工程学院, 江苏 镇江 2 1 2 0 0 3 ) 摘 要:采用虚拟样机技术, 利用多接触碰撞仿真分析方法代替传统木模试验对锚系运动设计进行验证. 通过对拉锚速度 进行多水平仿真实验, 并对试验结果进行分析计算, 得出了不同拉锚速度对锚系运动稳定性的影响关系, 可作为大型船舶 锚系设计的一个重要参考因素, 值得在船舶行业推广. 关键词:锚系;多接触碰撞仿真;拉锚速度 中图分类号: U 6 6 1 . 3 文献标志码:A 文章编号: 1 6 7 3- 4 8 0 7 ( 2 0 1 3 ) 0 4- 0 3 1 7- 0 5
数, 金属推荐值为 1 5 ; 最大阻尼系数表明碰撞中能 量损失情况, 其值通常为刚度系数的 0 1 %~ 1 %, 在
图1 基于 U G/ A D A MS的接触碰撞动力学分析流程 F i g . 1 A n a l y s i s f l o w c h a r t o f c o l l i s i o nd y n a mi c s b a s e do nt h e U G/ A D A MS
收稿日期: 2 0 1 2 - 1 1 - 0 6 作者简介:王黎辉( 1 9 6 9 —) , 男, 副教授, 研究方向为现代设计理论与方法. E m a i l : w a n g h @s i n a . c o m -l
建模和运动仿真分析方面, 由于技术保密, 国外研究
1 ] 资料较难看到, 在国内, 中国海洋大学[ 、 上海交通 2 ] 3 - 6 ] 大学[ 都有一定的研究, 尤以江苏科技大学[ 的
A b s t r a c t :I nt h i s p a p e r ,b y a d o p t i n g v i r t u a l p r o t o t y p e t e c h n o l o g y a n du s i n g a d y n a m i c c o n t a c t s i m u l a t i o na n a l y s i s m e t h o di n s t e a do f t h e t r a d i t i o n a l w o o d e nm o d e l ,t h e a n c h o r s y s t e mm o t i o nd e s i g ni s t e s t e d . T h r o u g hm u l t i l e v e l s i m u l a t i o ne x p e r i m e n t o f a n c h o r s p e e da n da n a l y s i so f t e s t r e s u l t s ,t h er e l a t i o n s h i pb e t w e e nd i f f e r e n t a n c h o r ,w h i c hc a nb e u s e dae r e n c e f a c t o r f o r l a r g e s c a l e s p e e da n da n c h o r m o t i o ns t a b i l i t y i s a b t a i n e d s h i pa n c h o r s y s t e md e s i g na n dw o r t h yo f p r o m o t i o ni nt h es h i p b u i l d i n gi n d u s t r y . K e yw o r d s :s h i pa n c h o r s y s t e m ;m u l t i p l ec o n t a c t a n dc o l l i s i o ns i m u l a t i o n ;a n c h o r s p e e d 锚系是船舶的重要部件之一. 锚系设计是船舶 设计的一项重要内容. 船舶在停泊或者启航时, 要有 抛锚和拉锚的动作, 抛锚或者拉锚不成功, 都会给船 舶安全航行造成影响. 长期以来, 船舶设计单位、 船 东和船厂都是通过基本型类推、 配合锚系木模试验 的方式验证设计锚系. 但是, 采用木模试验有以下弊 端: 木模只能按比例缩小, 使尺 ①由于实体船很大, 寸精度上不能准确反应出锚系布置实际状态, 导致 试验与实际情况有较大差距; ②木模的密度和质量 与实际偏差太大, 致使锚系相关结构特征不能很好 使设计周期 发挥性能; ③重复修改和反复木模试验, 较长、 造价增加, 也不能保证交船期. 因此, 急需借助 目前多体动力学辅助仿真技术, 在设计方案阶段及 详细设计阶段提前验证设计结果, 减少后期返工时 间和木模试验次数或取消木模设计. 在锚系参数化
1 0 ] 则和接触动力学模型特性[ , 刚度系数设置不易过
大, 一般可采用官方推荐值, 即软件默认值, 在A D
2 A M S / 2 0 0 5 版本中默认值是 1 0 0 0 0 0 N / m m ; 碰撞指
2 基于 U G/ A D A MS的拉锚接触碰撞 动力学分析流程
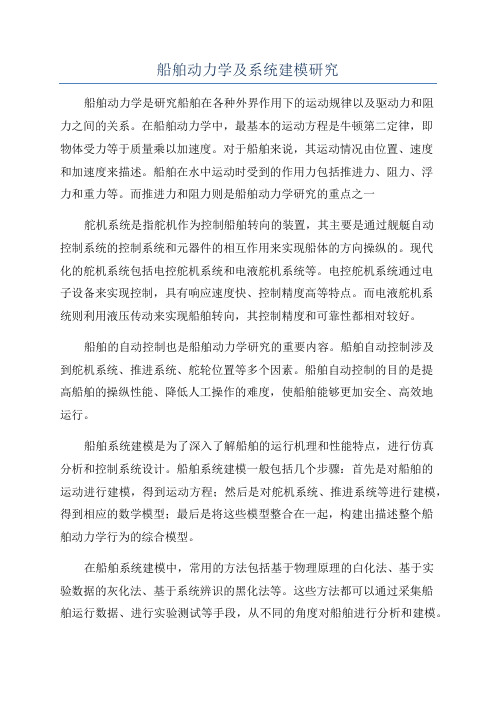
基于 U G / A D A M S的接触碰撞动力学分析流程 如图 1 .
第 4期 王黎辉, 等:大型船舶锚系多接触碰撞动力学分析研究 1 ) 锚系几何建模 根据仿真流程图, 首先建立锚系的三维几何模 型, 由于 A D A M S 本身几何建模能力较差, 锚系部件 形体参数又存在一定的复杂性, 本例采用了三维建 模软件 U G对锚系各部件进行几何建模和装配. 锚 系主要由拉锚机、 锚链、 锚链筒、 锚台、 锚、 锚唇等部 件组成( 图2 a ) ) . 为了提高仿真效率, 降低因机构复 杂而产生的累积计算误差, 在三维建模阶段对模型 进行了必要的简化处理, 装配好的三维模型如图 2 b ) . ) 锚系动力学建模 2 A D A M S 软件在动力学分析方面功能较为强大, 锚系三维模型建好后, 其几何模型文件需通过 U G
研究较为深入, 并且, 其研究成果已经在船舶行业进 行逐步推广. 在拉锚过程中, 组成锚系的各个部件多 是通过三维接触碰撞相互作用, 因此, 笔者在前人研 究基础上, 对拉锚速度及碰撞力进一步研究, 作为锚 系设计的参考.
1 接触碰撞动态力理论模型和求解参 数设置
1 1 接触力模型 A D A M S 中通常有两种接触力模型实现方法, 恢 复系数法( R e s t i t u t i o n ) 和冲击函数法( I m p a c t ) . 前者 处理碰撞行为比较简单, 难以计算出碰撞力和速度
9 ] 和效率都有较大影响[ .
触体穿透等意外情况. 为了防止这种情况的发生, 文 献[ 1 2 ] 采用了分段仿真的方法. 笔者则利用追加仿 真时间的方法, 也收到了明显的效果, 追加仿真时间 原理上类似于分段仿真, 也是把仿真时间分为几个 时间段, 在第一段时间仿真结束后, 通过修改追加仿 真时间, 可继续仿真. 经过笔者多次比较分析, 追加 仿真时间的方法与正常仿真相比既不产生误差也不 丢失数据. 并且能防止本应出现的仿真失败问题, 有 效提高了仿真的效率和成功率.