基于定子电压矢量定向的转矩提升方法研究
基于定子电压空间矢量感应电动机的转速控制_冯惕

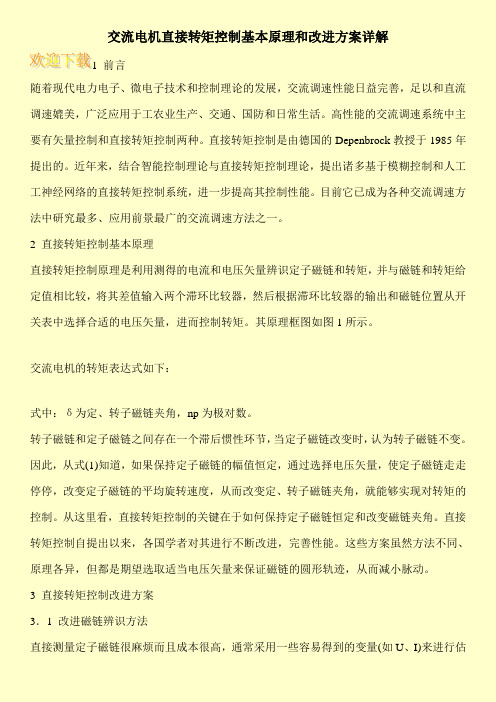
图1 Fig.1
定子电压矢量、电流矢量与转子磁链 矢量之间的关系
Relationship between stator voltage vector, current vector and rotor flux linkage vector
rM r e j0 ,s 为 r 的幅值,也是 rM 在 M 轴方向
的分量。 s 为 r 相对于静止坐标系的电角速度。 f 为转子磁链矢量 r 相对于转子的电角速度,也是转 子绕组中感应电动势和电流的角频率,即转差角频 率。s= r + f 。在以上两式各分量之间的关系分别为
—— 矢量 r 与 is 之间所夹的电角;
J—— 电力拖动系统折合到转子总的转动惯 量; TL—— 负载转矩。 将 L r 乘以式( 4 )减去 Lm 乘以式( 5)消去 ir , 解出 s 代入式( 2)得
us Rs is Ls pis Lm p r Lr
( 8)
2
控制原理
苏州 苏州
215104 215011)
为了简化控制算法,进一步提高感应电动机转速控制系统的性能,在空间矢量理论的
基础上,揭示了定子电压矢量对电动机转子磁场和电磁转矩的控制作用,提出以转差角频率调控 定子电压矢量,并通过三相定子电压的 SVPWM 实现,以形成对转子磁链和电磁转矩的控制,达 到快速控制电动机转速的原理、方法和系统。该方法避免了坐标变换,算法简单。通过仿真和实 验可看出,由此原理构建的电动机转速控制系统具有良好的起动性能、调速性能、抗负载扰动性 能及对电动机电阻值变化较好的鲁棒性。 关键词: 感应电动机 中图分类号: TM343 定子电压矢量 转差角频率 转速控制 鲁棒性
voltage vector controls rotor magnetic field and electromagnetic torque is revealed. The principle, method and system are presented in which slip angular frequency variable regulates the stator voltage vector that is implemented by three-phase SVPWM stator voltage, to form the regulation of rotor flux linkage and electromagnetic torque and achieve rapid control of motor speed. This method avoids the coordinate transformation and makes algorithm simple. Simulation and experiment results show that the motor speed control system which is built by this principle has good performance of starting, speed regulation, anti-load disturbance and better robustness to motor resistance variation. Keywords : Induction motor, stator voltage vector, slip angular frequency, speed control, robustness 外,矢量控制系统要得到快速、精准的转速响应依 赖于准确的电动机电感、电阻实际值。尽管电感值 可事先测量并根据电动机励磁水平大小予以调整; 但定、转子电阻由于受温度及集肤效应的影响,运 行时的实际值较难准确得到,由此产生的定向偏差 会造成励磁、转矩电流的互相耦合,使系统性能变 差。若要较好地解决此问题系统将更为复杂 [3] 。而 传统感应电动机转差频率控制的变频调速系统则是 主要根据定子电压频率、 基于电动机的稳态模型 [4] ,
定子电压矢量对定子磁链与电磁转矩的控制作用

定子电压矢量对定子磁链与电磁转矩的控制作用
定子电压矢量控制法是将三相交流电源输出的电压矢量旋转到任意方向,从而控制电
机的转子电磁转矩和转速。
这种控制方式可以通过调节定子电压矢量中的大小和方向,改
变定子磁通的分布,从而实现电机的转速和转矩控制。
当定子电压矢量方向与定子磁链方向相同时,定子磁链增强,电机转矩增大;当定子
电压矢量方向与定子磁链方向垂直时,定子磁链减小,电机转矩减小。
此外,定子电压矢
量大小的改变也能够影响电机的转速和转矩。
当定子电压矢量大小增加时,电机转速增加,转矩增加;当定子电压矢量大小减小时,电机转速减小,转矩减小。
通过对定子电压矢量的控制,可以实现精确的电机转速和转矩控制。
在矢量控制中,
采用了闭环控制方法,通过电流反馈控制定子磁通和转矩,从而实现了高精度控制。
此外,矢量控制还具有过载保护、失步保护等功能,可以提高电机的可靠性和稳定性。
总之,定子电压矢量控制法是一种高效、灵活的电机控制方法,具有精确的转速和转
矩控制能力,并能够提高电机的可靠性和稳定性。
在电机控制中,矢量控制已经成为了主
流的控制方法之一,未来也将继续发展和完善,为电机的应用创造更多的价值。
交流电机直接转矩控制基本原理和改进方案详解
交流电机直接转矩控制基本原理和改进方案详解1 前言随着现代电力电子、微电子技术和控制理论的发展,交流调速性能日益完善,足以和直流调速媲美,广泛应用于工农业生产、交通、国防和日常生活。
高性能的交流调速系统中主要有矢量控制和直接转矩控制两种。
直接转矩控制是由德国的Depenbrock教授于1985年提出的。
近年来,结合智能控制理论与直接转矩控制理论,提出诸多基于模糊控制和人工工神经网络的直接转矩控制系统,进一步提高其控制性能。
目前它已成为各种交流调速方法中研究最多、应用前景最广的交流调速方法之一。
2 直接转矩控制基本原理直接转矩控制原理是利用测得的电流和电压矢量辨识定子磁链和转矩,并与磁链和转矩给定值相比较,将其差值输入两个滞环比较器,然后根据滞环比较器的输出和磁链位置从开关表中选择合适的电压矢量,进而控制转矩。
其原理框图如图1所示。
交流电机的转矩表达式如下:式中:δ为定、转子磁链夹角,np为极对数。
转子磁链和定子磁链之间存在一个滞后惯性环节,当定子磁链改变时,认为转子磁链不变。
因此,从式(1)知道,如果保持定子磁链的幅值恒定,通过选择电压矢量,使定子磁链走走停停,改变定子磁链的平均旋转速度,从而改变定、转子磁链夹角,就能够实现对转矩的控制。
从这里看,直接转矩控制的关键在于如何保持定子磁链恒定和改变磁链夹角。
直接转矩控制自提出以来,各国学者对其进行不断改进,完善性能。
这些方案虽然方法不同、原理各异,但都是期望选取适当电压矢量来保证磁链的圆形轨迹,从而减小脉动。
3 直接转矩控制改进方案3.1 改进磁链辨识方法直接测量定子磁链很麻烦而且成本很高,通常采用一些容易得到的变量(如U、I)来进行估。
基于预期电压矢量的永磁同步电机直接转矩控制系统

构造出一种基于预期 电压矢量 的直接转矩控 制策略。通过与传统直接转矩控制策略 的对 比试验 , 表明提出的
直接转矩控制策略具有 电流谐波小 、 转矩和磁链 的脉动小 、 速度响应快 、 态误 差小 等特点。 稳
关 键 词 : 期 电压 ; 磁 同步 电机 ; 接 转 矩 控 制 ;空 间 矢 量 脉 宽 调 制 预 永 直 中 图 分 类 号 : M 3 1 文 献标 志 码 : 文章 编 号 :6 3 5 0 2 1 )20 2 -6 T 5 A 17 4 4 o s n vr r wthf q ec.C nie a saevc r us wd o u t n( V WM)cnpo i l,icnt tnet i eun y os rh t pc et l it m d l i S P p a i es c r d t op e h ao a r—
摘 要: 传统 的基 于开关表 的直 接转 矩控制存在着转矩和磁链脉动大 、 开关 频率不固定等 缺点。考虑到
空 间矢量脉宽调制技术在一个控制周期 内能 够产生 等效 的任 意相 位的 电压矢量 , 了改善直接 转矩控 制 的 为 控制效果 , 提出了一种预期电压矢量的确定方法 , 并用 P 控 制器代替 传统直接 转矩控 制系统 的滞环 比较器 , I
Die tTo qu nto fPe m a n a n tS n hr n us r c r e Co r lo r ne tM g e y c o o
矢量控制在电机转矩控制中的应用
矢量控制在电机转矩控制中的应用电机转矩控制是工业控制领域中常见的一种控制方式,矢量控制作为一种新的控制技术,为电机转矩控制带来了革命性的变化和提升。
本文将探讨矢量控制在电机转矩控制中的应用,并介绍其优势和局限性。
1. 矢量控制在电机转矩控制中的基本原理矢量控制是一种通过控制电机的电流和电压来实现对电机转矩的精确控制的方法。
其基本原理是借助于磁场定向和区分电机的转子磁场与定子磁场,从而实现对电机的转矩和速度的独立控制。
在矢量控制中,通过对电机的转子磁场进行矢量投影,可以将电机的转子磁场分解为直轴分量和交轴分量。
通过控制直轴分量和交轴分量的大小和方向,可以实现对电机转矩和速度的精确控制。
2. 矢量控制在电机转矩控制中的优势2.1 提高转矩响应速度:矢量控制在电机转矩控制中可以提高电机的转矩响应速度。
通过准确控制电机的电流和电压,可以实现对电机的实时调节,从而使电机能够快速响应外部转矩变化的要求。
2.2 增强低速转矩控制能力:相比传统的电机转矩控制方式,矢量控制在低速转矩控制方面具有明显的优势。
通过对电机电流和电压的精确控制,可以有效克服电机在低速运行时产生的转矩波动和不稳定性。
2.3 实现高精度控制:矢量控制在电机转矩控制中可以实现高精度的控制。
通过精确控制电机的电流和电压,可以精确控制电机的转矩和速度,从而实现对输出负载的精准控制。
3. 矢量控制在电机转矩控制中的局限性3.1 算法复杂度高:矢量控制在电机转矩控制中需要准确计算和控制电机的转子磁场和定子磁场,因此其算法复杂度相对较高。
这对硬件和软件的要求也更高,增加了实际应用的难度和成本。
3.2 对转子参数依赖较大:矢量控制在电机转矩控制中对电机的转子参数要求较高。
如果转子参数发生变化,可能会导致控制效果下降,需要重新调节和计算参数。
3.3 无法适用于所有类型的电机:矢量控制在电机转矩控制中无法适用于所有类型的电机。
例如,对于一些特殊结构的电机,如开关磁阻电机,由于其特殊的转子结构和控制特性,矢量控制可能无法有效应用。
基于定子参考电压矢量预测的SVPWM直接转矩控制研究

基于定子参考电压矢量预测的SVPWM 直接转矩控制研究王磊,王京,张勇军(北京科技大学高效轧制国家工程研究中心,北京100083)摘要:针对感应异步电动机直接转矩控制(direct to rque contr ol,DT C)系统存在转矩和磁链脉动的缺点,推导出一种新的减小脉动的控制策略。
通过对定子磁链的估算,获得下一周期的定子参考电压矢量,利用空间电压矢量脉宽调制(SV PW M )技术得到逆变器的开关控制信号。
通过M atlab/Simulink 仿真研究,验证了此算法的有效性。
关键词:直接转矩控制;空间电压矢量脉宽调制;参考电压矢量;异步电机中图分类号:T M 343 文献标识码:AResearch of Direct Torque Control Based on Forecast of Stator Reference VoltageVector and Space Vector Pulse Width ModulationW A NG Lei,W AN G Jing ,ZH A N G Y ong jun(N ational Engineering Research Center f or A dvanced Rolling Technology in UST B ,Beij ing 100083,China)Abstract:Consider ing the disadv antag es in flux and to rque r ipple o f dir ect t orque contr ol fo r asynchr onous mo tor ,a new co ntr ol strateg y t o r educe the pulse w as pro po sed.With estimating the stato r flux ,the stator reference v oltage v ecto r o f nex t sam ple period w as calculated.T he switching co nt rol signals of the inv erter ar e generated by space vecto r pulse w idth modulatio n (SVP WM )technolog y.T hr ough the simulation r esear ch,the effectiv eness of this contro l str ategy is prov ed.Key words:direct tor que co nt ro l;space vector pulse w idth modulatio n;refer ence vo ltag e vector ;asyn chro no us mot or基金项目:国家 211工程 资助项目(010301)作者简介:王磊(1983-),男,硕士研究生,Email:l_w an g624@hotm 本文针对异步电机,推导出了一种通过磁链估算对电压矢量进行预测的直接转矩控制策略,以减小转矩和磁链脉动,同时利用电压空间矢量脉宽调制的方式不仅可以提高系统稳态性能,同时也使逆变器的开关频率变为近似恒定。
基于定子电流矢量定向的异步电机转子磁链估计器及其应用研究
的性能。如果再加入适当的校正环节,则可以较好地抑 制这些干扰的影响。本文提出的基于定子电流矢量定向 的转子磁链估计器不包含定转子电阻参数,除了在
极少数奇异点之外,均可保持相当高的精度。无论是开 环运行还是闭环运行,当定转子电阻发生较大幅度变化 时,估计器性能几乎不受影响。与传统的磁链估计
器相比,新型磁链估计器在抗扰动方面具有明显的优势。 有了转子磁链的精确估计作为基础,异步电机矢量控制 的关键问题就得到了解决,各种控制策略就能够
20世纪70年代出现的矢量控制,使得异步电机的控制性 能大大提高。在间接磁场定向的矢量控制中,精确地估 计(或观测)转子磁链的幅值和角度是问题的
关键。传统的磁链估计器有电压型和电流型两种。电压 型磁链估计器依赖于定子电阻,而电流型磁链估计器依 赖于转子电阻。在电机运行过程中,定转子电阻会
随着温升的变化(以及导线的集肤效应等)而变化,对 估计精度影响很大。近年来,很多学者提出了降低定转 子电阻摄动对磁链估计影响的方法。例如,将两种
中基于定子电流矢量定向的转子磁链估计疹下文中称之 为新型磁链估计器“),其原理框图如所示。与传统的 电压型和电流型估计器不同,式(15)构成的新
型磁链估计器中引入了参数W1.W1是定子电流矢量的旋 转速度,稳态时,它与电源的角频率相等;动态过程中, W1的表达式为利用霍尔传感器可以得到精
度很高的定子电流值新型磁链估计器电流型估+器新型磁 链估计器从和可以看出,由于电流型磁链估计器依赖于 转子电阻,因此在电机转子电阻发生摄动时,其
估计器配合使用,或者改进电压型估计器的纯积分环节, 等等。然而,这些改进后的磁链估计器中,仍然包含定 转子电阻参数。本文提出了一种不包含定转子电
阻参数的转子磁链估计器,换言之,定转子电阻的摄动 对磁链估计器的精度影响甚微。本文从新坐标系下异步 电机的基本方程出发,导出了基于定子电流矢量定
基于定子参考电压矢量预测的SVPWM直接转矩控制研究

E E T C D V 2 1 V 1 0 No 3 L C RI RI E 0 0 o. 4 .
基 于定 子 参 考 电压 矢 量 预测 的 S W M 直接 转 矩控 制 研 究 VP
王 磊 , 京 , 勇 军 王 张
r f r n e v t geve t fne a pl e i d w a ac a e e e e c ola coro xts m e p ro sc lult d.T hes thi g c ntolsgn l ft n re r wic n o r i a so he ive t ra e
Absr c : ta t Con i rng t e dia v nt ge n fux a or ue rppl fd r c or e c nto o y hr no sde i h s d a a s i l nd t q i e o ie tt qu o r lf ras nc o us
( 京科技 大 学 高效轧 制 国家工程研 究 中心 , 北 北京 1 0 8 ) 0 0 3
摘 要 : 对 感 应 异 步 电动 机 直 接 转 矩 控制 (i c tru o t lD ) 针 dr t oq ecnr , TC 系统 存 在 转 矩 和 磁 链 脉 动 的 缺 点 , e o 推 导 出一 种 新 的 减 小 脉 动 的控 制 策 略 。通 过 对 定 子磁 链 的 估 算 , 得 下 一 周 期 的定 子 参 考 电压 矢 量 , 用 空 获 利
t e e fc i e e s o h s c n r l ta e y i p o e . h fe tv n s ft i o to r t g s r v d s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
采用 V / F (恒压频比 ) 控制的通用变频调速系 统应用时无需依赖电机参数 , 具有简单 、可靠以 及低成本等优点 , 在交流调速领域得到广泛的应 用 。但是 , 由于定子电阻压降的影响 , 传统的 V / F 控制系统低速时输出转矩下降 , 造成带载起动困 难 , 低频带载能力差 ( 3 Hz以下无法满载运行 ) 等 问题 , 必须加以改进
1 0 -
( 5)
ia ib ic
其中
=
2 3
1 2
3 2
( 6)
θ 为定子电压矢量旋转角度 , 可由当前运行频 率值直接计算得到 , 即 θ=2 π f1 d t
0
∫
( 7)
图 1 感应电机稳态等效电路和向量关系图
旋转坐标系的初始角度可为任意 , 不妨取 d 轴 和电压矢量角度一致 , 则电压矢量和电流矢量在空 间旋转坐标系中的关系如图 2 所示 , 经过同步旋转 坐标变换 , 可得到直轴分量 id 和交轴分量 iq 。其中
2
而 iq 与电压矢量垂直 , 即为电流的无功分量。因此 , 通过坐标变换 , 实现了有功电流与无功电流的解耦。
- ( Is R s ) ( sin < )
2
2
(4)
由式 ( 4 ) 可知 , 在高频段 , 感应电势 Em 比较 大 , 定子阻抗压降 Is R s 相对很小 , 可以忽略不计 ,
V s 和 Em 近似相等 , 可以用 V s / f1 来近似代替 Em / f1 ; 而在低频段 , 感应电势 Em 比较小 , 定子阻抗
[ 12 5]
矢量补偿是按照电机输入电压和电流之间的 三角关系来计算定子电压给定值的 , 从幅值和相 角两方面来修正定子电压
[ 22 5]
。该方法虽然准确 ,
但是定子电压矢量和电流矢量之间的夹角不易获 取 , 且计算复杂 , 实现困难 。 标量补偿只修正定子电压矢量的幅值
[ 62 7]
, 即
直接在定子反电动势的给定值的基础上添加一个 补偿量 。该方法比较容易实现 , 但工程实践表明 : 该方法容易导致气隙磁通饱和 , 造成过补偿 。 为解决上述问题 , 本文提出了一种基于定子 电压矢量定向的转矩提升方法 。通过定子电压矢 量定向 , 实现有功电流和无功电流的解耦 , 能够 方便地得到定子电阻压降补偿量 ; 同时通过对无 功电流的控制 , 使其保持恒定 , 可以进一步确保 低速时电机磁链的恒定 。最后 , 通过实验结果对 该方法的有效性进行了验证 。
压降 Is R s 相对较大 , 不能忽略 , 尤其在重载时 , V s 明显大于 Em , 当用 V s / f1 代替 Em / f1 时 , 会使磁通 <m 减小 , 从而造成电机输出转矩减小 , 带负载能 力变差 。 为了保证低频时依然能够获得额定磁通和相 应的输出转矩 , 在低频段应适当提高 V s , 以补偿 由定子电阻压降造成的影响 , 维持 <m 在额定值 。 但是 , 由于磁饱和现象的存在 , 如何精确补偿是 一个难点 。
<m = kEm / f1
2 转矩提升方案
211 定子电压矢量定向原理
式中 , f1 为感应电机当前运行频率 ; Em 为定子全 磁通在定子每相绕组中的感应电动势 ; 对于确定 的电机而言 , k 为常数 。 由式 ( 1 ) 可知 , 只要控制好 Em 和 f1 的量 , 就 可以达到控制磁通 <m 的目的 。但是在感应电机中 反电势 Em 的值无法直接获取 , 只能通过相电压 V s 来检测和控制 。而由图 1 所示向量关系图可知 2 2 2 (2) Em = V s + ( Is R s ) V s ( Is R s ) cos<
id 与定子电压矢量同相位 , 即为电流的有功分量 ;
设 V so为 Em 在额定频率 f0 时的值 , 则任意频 率 f1 时 , 为保持气隙磁通恒定 , 所需要的反电势 值为 :
Em = V so ( f1 / f0 )
(3)
将式 ( 3 )带入到式 ( 2 )中可得 :
V s = Is R s cos< + V so f1 f0
[8]
此外 , 当系统频率低于 10 Hz时 , 由于死区效 应等因素的影响 , 会出现无功不平衡引起的电流 振荡 , 这种振荡会在一定程度上影响定子电阻压 降补偿的效果 , 如何克服这种影响是另一个难点 。 本文提出的补偿方法能够有效地解决了这些 问题 , 极大地改善了控制系统的低速性能 。
。
(1)
当 f1 < 10 Hz时 , 由于无功的不平衡 , 会导致 电流的波动和系统振荡 , 致使补偿不准确 , 电机 输出转矩脉动 。为了抑制无功功率不平衡引起的 电流波动 , 必须保持无功电流 iqf大小恒定 。因此 , 在本方案 中 , 设 置了 一个 无功 电流 闭环调 节器 , 将定子电流中的无功分量与参考值 iq ref进行比较 ( iq ref由空载定子电流得到 , 约为 013 倍额定电流 ) , 并经过 P I调节后给出定子电压调节量 V sq , 该调节 量也将用于定子电压补偿 。 有功电流 idf是电流的转矩成分 , 无功电流 iqf 是电流的励磁成分 。因此 , 通过无功电流闭环控 制 , 能进一步确保定子磁链恒定 , 防止磁场饱和 。 从而可以得到定子电阻压降补偿量为
V b = V s + V sq - V s
3
(9)
为了防止高频噪声干扰 , 还必须对补偿量 V b 进行一阶低通滤波 , 才能得到最终的定子电阻压 降补偿值 V bf 。定子电阻压降补偿控制控制系统框 图如图 3 所示 。
图 3 定子电阻压降补偿控制系统框图
利用提升后的电压值 V sf和相位 θ进行空间矢 量脉宽调制 , 即能对定子电阻压降进行补偿 。
图 2 电流矢量坐标变换原理图
212 定子电阻压降补偿
对直轴分量和交轴分量进 行一 阶低 通滤 波 , 可得到有功分量 id f和无功分量 iqf , 即式 ( 4 ) 中的
Is cos< 和 Is sin < , 将 id f和 iqf带入式 ( 4 )中可得 V s = Id f R s + V so f1 f0
收稿日期 : ・2 6 ・
[3]
。
2009 204 2 10
基于定子电压矢量定向的转矩提升方法研究 于 泳, 等
1 定子电阻压降分析
由文献 [ 4 ]的分析可知 , 定子电阻压降补偿是 在保持定子磁链大小恒定 (等于其额定值 ) 的基础 上进行的 。由图 1 所示的感应电机稳态等效电路和 电机学的基本原理可知 , 三相异步电动机定子每 极磁通可由下式表达
。
已有众多学者对定子电阻压降进行了深入研 究 , 并提出了多种补偿方案 。比较传统的补偿方 法是手动补偿法 , 即人为地设定一个补偿量 , 该 方法偶然性比较大 , 容易导致过补偿和欠补偿
[2]
。
现在采用的方法大多是自动补偿方法 , 按照其补 偿方式的不同 , 大致可分为两类 : 矢量补偿方法 和标量补偿方法
本方案采用电流反馈控制模式 , 对采样得到 的定子电流进行基于定子电压矢量定向的旋转坐 标变换 , 可以得到同步旋转坐标系下 ( d - q 轴 ) 定 子电流的有功和无功分量 , 其坐标变换方程为
id iq i α i β
=
θ cos
1 2 3 2
θ sin
i α i β
θ cos θ - sin
图 6 为电机带额定负载运行在 1 Hz时的定子 相电流波形 , 电机运行稳定 , 波形平稳 。而补偿 前 , 电机在 3 Hz以下无法带满载运行 。可见 , 采 用本文定子电阻压降补偿方案后 , 系统的低频带 载性能得到较大提升 。
3 实验结果分析
图 4为具有转矩提升功能的感应电机 V / F 控制 系统框图 , 通过 715 kW 三相感应电机 V / F 控制系 统平台进行了验证 , 采用 T MS320F2812 DSP 芯片来 实现。三相感应电动机的额定参数为 Pn = 715 kW ,
微电机
2010 年第 43 卷第 1 期
基于定子电压矢量定向的转矩提升方法研究
于 泳 , 熊文凯 , 陈 伟 , 徐殿国
(哈尔滨工业大学 电气工程系 , 哈尔滨 150001 )
摘 要 : 感应电动机定子电阻压降导致 V / F控制系统低速时的输出转矩下降 , 严重影响了 V / F控制 系统的低速性能。在分析现有转矩提升方案的基础上 , 提出了一种新颖的转矩提升方法。通过基于定 子电压矢量定向的旋转坐标变换 , 可以实现定子电流的解耦 , 从而方便地得到定子电阻压降补偿量。 该方法只需知道定子电阻值 , 实现简单。实验结果表明 : 采用补偿方案后 , 电机起动性能良好 , 电机 能在 1 Hz满载平稳运行。实验结果验证了该转矩提升方案的有效性。 关键词 : 恒压频比控制 ; 转矩提升 ; 定子电压矢量定向 ; 定子电流解耦
2 2 - ( Iqf R s )
( 8)
根据压频比 V / f 和当前运行频率 f1 产生参考输 ・2 7 ・
微电机
3 出电压 V s , 将式 ( 11 ) 所得到 V s 值与参考电压值 3 Vs
2010 年第 43 卷第 1 期
相比较即可得到补偿电压量 (V s -
3 Vs
)。
段时间后 , 变频器出现过载保护 , 封锁 PWM 驱动 信号 。图 5 ( b )为补偿后的起动电流波形 , 起动过 程中没有产生大的电流冲击 , 电流幅值稳定 , 起 动性能良好 。
中图分类号 : T M30112 文献标志码 : A 文章编号 : 1001 26848 (2010) 01 20026 203
Research on Torque Boost M ethod Ba sed on Sta tor Voltage Vector O r ien ted Con trol YU Yong, X IONG W en 2kai, CHEN W ei, XU D ian 2guo (Depantm ent of Electrical Engineering, Harbin Institute of Technology, Harbin 150001, China ) Abstract: The low 2speed performance of V / F controlled induction motor drive system is significantly im 2 paired by the decline of the output torque induced by the stator voltage drop. B ased on analysis of the ex2 isting m ethods, a novel autom atic torque compensation strategy was p roposed. The stator current can be decoup led by the rotation coordinate transformation based on stator voltage vector oriented control, and then the stator voltage drop compensation component can be achieved easily . This method was easily im 2 p lem ented Since only stator resistance is needed. The experim ental results using the p roposed method show that the rotor speed can be controlled down to 1 Hz w ith full load, and the starting perfor mance is i m p roved greatly . The experi m ents verified the torque boost method work well . Key W ords: V / F control; Torque compensation; Stator voltage vector oriented; Stator current decoup le