哈工大机械振动基础大作业
哈工大机械制造技术基础大作业

哈工大机械制造技术基础大作业一、零件加工图样在CA6140机床中,拨叉在变速箱中起到控制齿轮组的移动,改变啮合齿轮对,从而改变传动比实现变速功能。
零件材料采用200HT 灰铸铁,生产工艺简单、可铸性高,但材料脆性大不易磨削。
需要加工的部分及加工要求如下:1、0.0210Φ22+孔,还有与其相连的8M 螺纹孔和Φ8锥销孔;2、小孔的上端面,大孔的上下两端面;3、大头的半圆孔0.40Φ55+;4、Φ40上端面,表面粗5、糙度为 3.2Ra ,该面和Φ20孔中心线垂直度误差为0.05mm ;5、0.50Φ73+半圆形上下端面与Φ22孔中心线垂直度误差为0.07mm 。
二、零件加工工艺设计(一)确定毛坯的制造形式零件材料为HT200。
考虑到零件在机床运行时过程中所受冲击不大,零件结构又比较简单,生产类型为大批生产,故选择铸件毛坯。
选用铸件尺寸公差等级CT9级。
(二)工艺初步安排零件的加工批量以大批量为主,用通用机床加工,工序适当集中,减少工件装夹次数以缩短生产周期、保证其位置精度。
(三)选择基准基准的选择是工艺规程设计中的重要工作之一。
基准选择得正确合理,可以使加工质量得到保证,生产效率得以提高。
(1)粗基准的选择:以零件的底面为主要的定位粗基准,以两个小头孔外圆表面为辅助粗基准。
这样就能限制工件的五个自由度,再加上垂直的一个机械加紧,就可达到完全定位。
(2)精基准的选择:考虑到要保证零件的加工精度和装夹准确方便,依据“基准重合”原则和“基准统一”原则,以粗加工后的底面为主要定位基准,以两个小孔头内圆柱表面为辅助的定位精基准。
(四)制定工艺路线1.工艺方案分析此零件加工工艺大致可分为两个:方案一是先加工完与Φ22mm 的孔有垂直度要求的面再加工孔。
而方案二恰恰相反,先加工Φ22mm的孔,再以孔的中心线来定位加工完与之有垂直度要求的三个面。
方案一装夹次数较少,但在加工Φ22mm的时候最多只能保证一个面与定位面之间的垂直度要求。
哈工大机械制造基础大作业二

题目及要求(1) 机械加工工艺路线(工序安排)① 工艺方案分析 加工重点、难点② 工序编排 加工顺序、内容③ 加工设备和工艺装备(2) 关键问题分析① 加工工艺问题② 装夹问题③ 生产率问题④ 新技术(3) 解决关键问题的工艺措施(参阅资料)一、零 件 的 分 析零件的工艺分析:零件的材料为HT200,灰铸铁生产工艺简单,铸造性能优良,但塑性较差、脆性高,不适合磨削,为此以下是拨叉需要加工的表面以及加工表面之间的位置要求需要加工的表面:1。
小孔的上端面、大孔的上下端面;2。
小头孔0.021022+-Φmm 以及与此孔相通的8Φmm 的锥孔、8M 螺纹孔;mm;3。
大头半圆孔55位置要求:小头孔上端面与小头孔中心线的垂直度误差为0.05mm、大孔的上下端面与小头孔中心线的垂直度误差为0。
07mm.由上面分析可知,可以粗加工拨叉底面,然后以此作为粗基准采用专用夹具进行加工,并且保证位置精度要求。
再根据各加工方法的经济精度及机床所能达到的位置精度,并且此拨叉零件没有复杂的加工曲面,所以根据上述技术要求采用常规的加工工艺均可保证.二、零件加工工艺设计(一)确定毛坯的制造形式零件材料为HT200.考虑到零件在机床运行过程中所受冲击不大,零件结构又比较简单,生产类型为大批生产,故选择铸件毛坯。
选用铸件尺寸公差等级CT9级,该拨叉生产类型为大批生产,所以初步确定工艺安排为:工序适当分散;广泛采用专用设备,大量采用专用工装。
(二)基面的选择基面的选择是工艺规程设计中的重要工作之一。
基面选择得正确与合理,可以使加工质量得到保证,生产效率得以提高。
(1) 粗基准的选择:以零件的底面为主要的定位粗基准,以两个小头孔外圆表面为辅助粗基准。
这样就可以达到限制五个自由度,再加上垂直的一个机械加紧,就可以达到完全定位。
(2)精基准的选择:考虑要保证零件的加工精度和装夹准确方便,依据“基准重合"原则和“基准统一”原则,以粗加工后的底面为主要的定位精基准,以两个小头孔内圆柱表面为辅助的定位精基准。
机械振动大作业
《机械振动基础》大作业(2015年春季学期)题目基于MATLAB求系统特性姓名学号班级专业机械设计制造及其自动化报告提交日期2015年5月7哈尔滨工业大学报告要求1.请根据课堂布置的2道大作业题,任选其一,拒绝雷同和抄袭;2.报告最好包含自己的心得、体会或意见、建议等;3.报告统一用该模板撰写,字数不少于3000字,上限不限;4.正文格式:小四号字体,行距为1.25倍行距;5.用A4纸单面打印;左侧装订,1枚钉;6.课程报告需同时提交打印稿和电子文档予以存档,电子文档由班长收齐,统一发送至:liuyingxiang868@。
7.此页不得删除。
评语:成绩(15分):教师签名:年月日求解多自由度矩阵的认识体会。
二、MATLAB程序图clearclose%--定义质量阵和刚度阵m1 = 2;m2 = 3;m3 = 5;m4 = 8;m5 = 4;m6 = 7;m7 = 7;m8 = 11;k1 = 25;k2 = 30;k3 = 45;k4 = 60;k5 = 70;k6 = 90;k7 = 100;k8 = 110; {}{u+u Km = [m1 0 0 0 0 0 0 0;0 m2 0 0 0 0 0 0;0 0 m30 0 0 0 0;...0 0 0 m4 0 0 0 0;0 0 0 0 m5 0 0 0;0 0 00 0 m6 0 0;...0 0 0 0 0 0 m7 0;0 0 0 0 0 0 0 m8];k = [k1+k2,-k2,0,0,0,0,0,0;-k2,k2+k3,-k3,0,0,0,0,0;...0,-k3,k3+k4,-k4,0,0,0,0;0,0,-k4,k4+k5,-k5,0,0,0;...0,0,0,-k5,k5+k6,-k6,0,0;0,0,0,0,-k6,k6+k7,-k7,0;...0,0,0,0,0,-k7,k7+k8,-k8;0,0,0,0,0,0,-k8,k8];[V,D]=eig(k,m); %%--特征频率DD和振型VVfor j=1:1:8w(j)=sqrt(D(j,j)); %---特征频率fprintf('wn%d = %6.4f\n',j,w(j)); %--从小到大依次输出8个固有频率值for i=1:1:8absV(i,j)=abs(V(i,j));endendmax=max(absV); %--为了归一化取振幅最大值for j=1:1:8for i=1:1:8V(i,j)= V(i,j)/max(j); %--振幅归一化endendfigurex=1:8;for a=1:8subplot(2,4,a),plot(x,V(x,a)); %分为2*4的子图;并画出图形hold on;grid on;title('振型图');end三、MATLAB结果输入输出wn1 = 0.4332wn2 = 1.7823wn3 = 3.2255wn4 = 4.1038wn5 = 5.2021wn6 = 6.2638wn7 = 6.5306wn8 = 7.5722四、心得体会1)学习机械振动课程的体会振动的强弱用振动量来衡量,振动量可以是振动体的位移、速度或加速度。
哈工大机械工程测试技术基础大作业一——信号的分析与系统特性
Harbin Institute of Technology课程大作业说明书课程名称:机械工程测试技术基础设计题目:信号的分析与系统特性院系:机电学院班级:0908107设计者:学号:10908107XX指导教师:王慧峰设计时间:2012/XXXX哈尔滨工业大学题目一信号的分析与系统特性题目:写出下列信号中的一种信号的数学表达通式,求取其信号的幅频谱图(单边谱和双边谱)和相频谱图,若将此信号输入给特性为传递函数为)H的系统,试讨论信号(s参数的取值,使得输出信号的失真小。
作业要求(1)要求学生利用第1章所学知识,求解信号的幅频谱和相频谱,并画图表示出来。
T及幅值A,每个学生的(2)分析其频率成分分布情况。
教师可以设定信号周期取值不同,避免重复。
(3)利用第2章所学内容,画出表中所给出的系统)H的伯德图,教师设定时间(sω的取值,每个同学取值不同,避免重复。
常数τ或阻尼比ζ和固有频率n(4)对比2、3图分析将2所分析的信号作为输入)x,输入给3所分析的系统)(tH,(s求解其输出)(t y 的表达式,并且讨论信号的失真情况(幅值失真与相位失真)若想减小失真,应如何调整系统)(s H 的参数。
解题矩形波的0=2T τ ,不妨设T 0=2s ,A=1。
2.幅频谱和相频谱将其分解为三角函数表示形式的傅里叶级数,002200-200211=(t)=+-=0TT T T T a w dt Adt Adt T T ⎛⎫ ⎪⎝⎭⎰⎰⎰00220000-200222()cos()cos()-cos()0TTT T T n a w t nw t dt A nw t dt A nw t dt T T ⎛⎫==+= ⎪⎝⎭⎰⎰⎰00220000-20020000000022()sin()sin()-sin()2 =cos()-cos()2024 =0 n TT T T T n b w t nw t dt A nw t dt A nw t dt T T T T A A nw t nw t T T nw nw An nπ⎛⎫==+ ⎪⎝⎭⎛⎫ ⎪⎪ ⎪⎝⎭⎧⎪⎨⎪⎩⎰⎰⎰为奇数为偶数式中002=w T π。
《机械振动基础》期末复习试题5套含答案.doc

中南大学考试试卷2005 - 2006学年上学期时间门o分钟《机械振动基础》课程32学时1.5学分考试形式:闭卷专业年级:机械03级总分100分,占总评成绩70 %注:此页不作答题纸,请将答案写在答题纸上一、填空题(本题15分,每空1分)1>不同情况进行分类,振动(系统)大致可分成,()和非线性振动;确定振动和();()和强迫振动;周期振动和();()和离散系统。
2、在离散系统屮,弹性元件储存(),惯性元件储存(),()元件耗散能量。
3、周期运动的最简单形式是(),它是时间的单一()或()函数。
4、叠加原理是分析()的振动性质的基础。
5、系统的固有频率是系统()的频率,它只与系统的()和()有关,与系统受到的激励无关。
二、简答题(本题40分,每小题10分)1、简述机械振动的定义和系统发生振动的原因。
(10分)2、简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。
(10分)3、共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?(20分)4、多自由系统振动的振型指的是什么?(10分)三、计算题(本题30分)图1 2、图2所示为3自由度无阻尼振动系统。
(1)列写系统自由振动微分方程式(含质量矩阵、刚度矩阵)(10分);(2)设k t[=k t2=k t3=k t4=k9 /, =/2/5 = /3 = 7,求系统固有频率(10 分)。
13 Kt3四、证明题(本题15分)对振动系统的任一位移{兀},证明Rayleigh商R(x)=⑷严⑷满足材 < 尺⑴ < 忒。
{x}\M\{x}这里,[K]和[M]分别是系统的刚度矩阵和质量矩阵,®和①,分别是系统的最低和最高固有频率。
(提示:用展开定理{x} = y{M} + y2{u2}+……+ y n{u n})3 •简述无阻尼单自由度系统共振的能量集聚过程。
(10 分) 4.简述线性多自由度系统动力响应分析方法。
(10 分)中南大学考试试卷2006 - 2007学年 上 学期 时间120分钟机械振动 课程 32 学时 2 学分 考试形式:闭卷专业年级: 机械04级 总分100分,占总评成绩 70%注:此页不作答题纸,请将答案写在答题纸上一、填空(15分,每空1分)1. 叠加原理在(A )中成立;在一定的条件下,可以用线性关系近似(B ) o2. 在振动系统中,弹性元件储存(C ),惯性元件储存(D ) , (E )元件耗散 能量。
哈工大机械振动作业

1.一个有阻尼的弹簧质量系统,已知m=196kg,k=19600N/m,c=2940Ns/m,作用在质量块上的激振力为F(t)=160sin(19t)N,试求忽略阻尼及考虑阻尼的两种情况中,系统的振幅放大因子及位移。
解:1110 ns ω--===191.910nrωω===忽略阻尼时:ζ=0,振幅放大因子为0.3831β===位移为31600.383110 3.12819600FX mm mmkβ==⨯⨯=考虑阻尼时:0.75ς===振幅放大因子为0.2588β===位移为31600.258810 2.11219600FX mm mmkβ==⨯⨯=2.计算单自由度无阻尼系统对如图所示矩形激励力作用下的响应。
解:设()01 ()cos sin 2n n n a F t a n t b n t ωω∞==++∑则2T πω=002()0Ta F t dt T ==⎰ 00223()cos (sin sin )22T n F n n a F t n tdt T n ππωπ==-⎰ 02()sin 0Tn b F t n tdt T ω==⎰22cos()n n n x x x a n t ζωωω++=由于无阻尼,故上式方程变为:2cos()n n x x a n t ωω+=(0)0,(0)0x x ==222()(cos t cos )ncn n n a x t n t n ωωωω∴=--222()(cos t cos )ncn n n a x t n t n ωωωω=--0()0,()0sn x t x t ==故单自由度无阻尼系统的响应为222123()(sin sin )(cos t cos )()22n n n F n n x t n t n n ππωωπωω∞==---∑3.计算单自由度系统的响应:0024()(4), 1 mm, 1 mm/s x x x t t x x δδ++=--==-(2rad/s, =0.5, n d ωζω= 解:由于冲量的存在,0010v x =+=当0<t<4时,()sin())n t t d x t Ae t Ae ζωωϕϕ--=+=+A ===000tan tan 3d n x arc arc v x ωπϕςω⎛⎫===⎪+⎝⎭⎝⎭故系统的响应为:())3t x t π-=+ 当t>4时,''441,0v x ==假设原系统静止,根据叠加原理有A ==='(4)()4)),t 4t x t t --=->故该单自由度系统的总响应为:(4))043())4))t 43t t t t x t t ππ----+<<=+-->。
哈工大机械设计基础大作业一

大作业计算说明书题目:平面连杆机构设计学院:英才学院班号:1236405班学号:**********姓名:***日期:2014年9月27日哈尔滨工业大学大作业任务书题目:平面连杆机构设计设计原始数据及要求:l为70mm,摆角ψ为35°,摇杆行程速比系设计一曲柄摇杆机构。
已知摇杆长度3∠,值数K为1.2,摇杆CD靠近曲柄回转中心A一侧的极限位置与机架间的夹角为CDA为50°,试用图解法设计其余三杆的长度,并检验(测量或计算)机构的最小传动角γ。
目录1.设计原始数据及要求 (1)2.设计过程 (1)2.1计算极位夹角θ2.2绘制机架位置线及摇杆的两个极限位置2.3确定曲柄回转中心2.4确定各赶长度2.5验算最小传动角γ3.参考文献 (2)1. 设计原始数据及要求设计一曲柄摇杆机构。
已知摇杆长度3l 为70mm ,摆角ψ 为35°,摇杆行程速比系数K 为1.2,摇杆CD 靠近曲柄回转中心A 一侧的极限位置与机架间的夹角为CDA ∠ ,值为50°,试用图解法[1]设计其余三杆的长度,并检验(测量或计算)机构的最小传动角γ 。
2.设计过程2.1计算极位夹角θ 1 1.2118018016.361 1.21K K θ--=︒=︒⨯=︒++ 式中,θ ——极位夹角;K ——摇杆行程速比系数。
2.2绘制机架位置线及摇杆的两个极限位置平面上任取一点D ,作一水平线AD 作为机架位置线,由∠CDA=50°和50ψ=︒ 确定CD 杆的两个极限位置。
并作CD=70mm 。
如图1所示:2.3确定曲柄回转中心曲柄的回转中心必在A ,C1,C2所在的圆上,只要确定该圆即可作出A 的位置。
由16.36θ=︒ 得出12C C 所对圆心角为∠C 1OC 2=32.72°,则∠OC 1C2=∠OC 2C 1=73.64°,作出该两角,即可确定圆心O 的位置。
作出圆O ,与机架位置线的左侧交点即为A 。
哈工大机械原理大作业1
420.636249
198
-25.780027
-7.408008
448.711622
19
17.496096
11.511568
389.280068
199
-27.066134
-7.329197
454.399338
20
19.511173
11.576658
356.588380
200
-28.338399
-6.837081
484.309157
26
31.792111
11.837106
133.586249
206
-35.672384
-6.752179
488.602299
27
33.860111
11.856813
92.240035
207
-36.843419
-6.666544
492.701606
28
35.930920
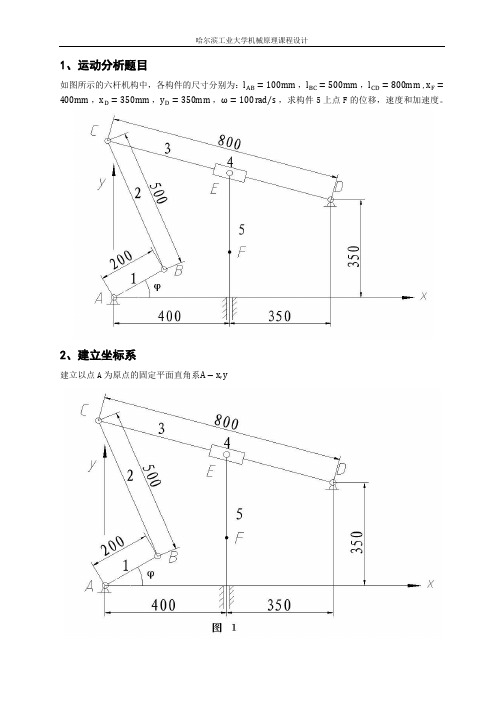
(4)利用导数的定义与其物理意义
利用上述公式,选取适当的步长h,利用F点位移就可以得出速度与加速度
5、用VC编程
#include <stdio.h>
#include <math.h>
#define pi 3.14159265358979323846
//定义全局变量
double Lab,Lbc,Lcd,Xf,Xd,Yd;//定义已知位置量
11.079883
-670.906136
223
-53.471235
-5.223053
533.839546
44
68.312705
10.958430
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械振动基础》大作业(2015年春季学期)题目基于MATLAB求系统特性姓名学号班级专业机械设计制造及其自动化报告提交日期哈尔滨工业大学报告要求1.请根据课堂布置的2道大作业题,任选其一,拒绝雷同和抄袭;2.报告最好包含自己的心得、体会或意见、建议等;3.报告统一用该模板撰写,字数不少于3000字,上限不限;4.正文格式:小四号字体,行距为倍行距;5.用A4纸单面打印;左侧装订,1枚钉;6.课程报告需同时提交打印稿和电子文档予以存档,电子文档由班长收齐,统一发送至:。
7.此页不得删除。
评语:成绩(15分):教师签名:年月日解多自由度矩阵的认识体会。
二、MATLAB程序图:>> m=[];k1=[];k=[];c=[];c1=[];for i=1:9a=input('输入质量矩阵m:');m(i,i)=a;end ;for j=1:9b=input('输入刚度系数k:');k1(1,j)=b;endfor l=1:8k(l,l)=k1(l)+k1(l+1);k(9,9)=k1(9);k(l+1,l)=-k1(l+1);k(l,l+1)=-k1(l+1);k(9,8)=-k1(9);k(8,9)=-k1(9);end ;syms w;B=k-w^2*m %系统的特征矩阵BY=det(B); %展开行列式W=solve(Y); %求解whlW=length(W);[V,D]=eig(k,m);for I=1:9for J=1:9V(J,I)=V(J,I)/V(5,I);endendVW三 MATLAB结果输入输出:程序输入内容:输入质量矩阵m:1输入质量矩阵m:2输入质量矩阵m:3输入质量矩阵m:4输入质量矩阵m:5输入质量矩阵m:6输入质量矩阵m:7输入质量矩阵m:8输入质量矩阵m:9输入刚度系数k:10输入刚度系数k:11输入刚度系数k:12输入刚度系数k:13输入刚度系数k:14输入刚度系数k:15输入刚度系数k:16输入刚度系数k:17输入刚度系数k:18Matlab 输出界面截图:输出结果:B =[ 21-w^2, -11, 0, 0, 0, 0, 0, 0, 0][ -11, 23-2*w^2, -12, 0, 0, 0, 0, 0, 0][ 0, -12, 25-3*w^2, -13, 0, 0,0, 0, 0][ 0, 0, -13, 27-4*w^2, -14, 0, 0, 0, 0][ 0, 0, 0, -14, 29-5*w^2, -15, 0, 0, 0][ 0, 0, 0, 0, -15, 31-6*w^2, -16, 0, 0][ 0, 0, 0, 0, 0, -16,33-7*w^2, -17, 0][ 0, 0, 0, 0, 0, 0, -17, 35-8*w^2, -18][ 0, 0, 0, 0, 0, 0, 0, -18, 18-9*w^2]V =W =.224079.403四. 心得体会:(一)利用Matlab 进行多自由度振动分析的体会:MATLAB是一种高性能软件平台,是一种面向科学与工程的高级语言,它集数值分析、矩阵运算、信号处理和图形显示于一体,构成了一个功能强大、方便、界面友好的用户环境。
运用MATLAB提供的强大的数值分析功能进行微分方程数值求解,在机械振动系统仿真分析中有着很大的优越性。
MATLAB仿真方便高效,功能强大,可方便地定义仿真参数和选择积分方法,用户只需在文件编辑器中列出描述振动系统的数学模型———状态方程表达式,组成M文件,然后调用相应的微分方程解题器(Solver),其结果便可以用数值或图形方式显示出来。
这些功能在MATLAB控制系统工具箱中,是以高度集成的一两条函数命令来实现的。
对于线性振动系统,则可以直接应用MATLAB控制系统工具箱函数进行时频域仿真分析。
本题目Matlab的解法便根植于此,在局部上进行了一定的简化。
MATLAB的数值仿真方法MATLAB仿真就是运用它所提供的强大的数值分析功能对微分方程组的数值积分。
它提供有多种积分方法,各有着不同的功能和适用范围以供选择。
对于常微分方程(ODE)的解题器,可以在给定的初始时间和条件下,通过数值方法计算每个程序步骤的解,并验证该解是否满足给定的容许误差,如果满足,该解就是一个正确的解;否则就再试一次,直到求出解为止。
(以下内容本题的解法中未设计,作为附加只是给出说明)如果必要的话,还可以进行时域仿真,并由数值结果以绘图命令plot绘出状态变量随时间的变化曲线和相平面上的相轨迹。
对状态空间表达式取拉氏变换,可定义输出响应与输入激励之比为多自由度线性振动系统的传递函数矩阵。
其表征了整个多自由度振动系统本身的固有特性,它的各组成元素为其对应的单输入与单输出间的传递函数。
个人最直观的感受是,Matlab功能可靠,而且操作相对简单,能调用的函数库较多,可以有效规避许多复杂的编程步骤,实现简便的计算。
但客观的来讲,这种编程对我而言还有很多难点,在设计程序的过程中,进行了一定的借鉴。
但是,最终,我较好地完成了任务,实现了9自由度无阻尼振动系统Matlab分析的预期功能。
(二)学习机械振动课程整体的认识和体会:机械振动在我们的日常生活中扮演着非常重要的角色。
它可能给人们的生活带来烦恼,也可能对生活带来方便。
只要我们扬长避短,就能很好的利用它。
学习机械振动基础这门课程的目的,正在于此。
这对我们今后的机械设计生涯,是很有指导意义的,对我们能设计出合格的产品,是很有帮助的。
在这里,我想简要地总结下课上学习的内容:机械振动的定义就是某一个物理量在它的平衡点的附近来回的运动或者就是物体经过它的平衡位置所做的一种往复的运动。
也可以说成是物体的一部分或者是全部沿着直线或者是曲线往返的颤动,有一定的规律和周期。
有时为了简便人们也把它简称为振动。
振动是一个比较重要的研究课题。
机械振动基础课程的主要内容总结来讲,分为以下几个部分:1.简谐振动:简谐振动是振动的一种形式。
自变量为时间的正弦函数或者是余弦函数的一种振动。
在我们的生活中是比较常见的。
也是一种最简单的振动。
简谐振动的特点主要有往复性,周期性,对称性。
弹簧拉一个小球左右或者是上下的摆动就是简谐振动。
还有单摆的运动也是简谐振动的例子。
2.共振:振动频率,加速度和振幅可以是影响振动的主要因素古希腊的阿基米德曾经说过“给我一个支点,我会撬起整个地球。
”而现代的美国的发明家特土拉也说过,只要是给他一个共振器,他就能把地球一分为二。
但是当共振的波达到一定的强度时,就会产生我们所不想看到的危害。
振动也会对人的身体造成危害。
振动的频率在人的发病过程中有重要的作用。
人们对振动的接触的时间越长,就会越容易因为振动发病。
而且长期与振动工具接触很有可能产生振动病。
在机械设计过程中,一定要注意这点,合理减小振动,可以最大限度的减小其对操作人员的伤害。
3. 单自由度系统:确定一个机械系统的所需的独立坐标数,称为系统的。
分析一个实际机械结构的振动特性时需要忽略某些次要因素,把它简化为,同时确定它的自由度数。
简化的程度取决于系统本身的主要特性和所要求分析计算结果的准确程度,最后再经过实测来检验简化结果是否正确。
最简单的弹簧质量系统是单自由度系统,它是由一个弹簧和一个质量组成的系统,只用一个独立坐标就能确定其运动状态。
根据具体情况,可以选取线位移作为独立坐标,也可以选取角位移作为独立坐标。
以线位移为独立坐标的系统的振动,称为直线振动。
以扭转角位移为独立坐标的系统的振动,称为扭转振动。
4. 多自由度系统:不少实际工程振动问题,往往需要把它简化成两个或两个以上自由度的多自由度系统。
例如,只研究汽车垂直方向的上下振动时,可简化为以线位移描述其运动的单自由度系统。
而当研究汽车上下振动和前后摆动时,则应简化为以线位移和角位移同时描述其运动的2自由度系统。
2自由度系统一般具有两个不同数值的固有频率。
当系统按其中任一固有频率自由振动时,称为主振动。
系统作主振动时,整个系统具有确定的振动形态,称为主振型。
主振型和固有频率一样,只决定于系统本身的物理性质,与初始条件无关。
多自由度系统具有多个固有频率,最低的固有频率称为第一阶固有频率,简称基频。
研究梁的横向振动时,就要用梁上无限多个横截面在每个瞬时的运动状态来描述梁的运动规律。
因此,一根梁就是一个无限多个自由度的系统,也称。
弦、杆、膜、板、壳的质量和刚度与梁相同,具有分布的性质。
因此,它们都是具有无限多个自由度的连续系统,也称分布系统。
5 .机械振动有不同的分类方法:按产生振动的原因可分为、受迫振动和;按振动的规律可分为简谐振动、非谐周期振动和随机振动;按振动系统结构参数的特性可分为线性振动和非线性振动;按振动位移的特征可分为扭转振动和。
(1)自由振动:去掉或约束之后,所出现的振动。
振动只靠其弹性恢复力来维持,当有时振动便逐渐衰减。
自由振动的频率只决定于系统本身的物理性质,称为系统的固有频率。
(2)受迫振动:机械系统受外界持续激励所产生的振动。
简谐激励是最简单的持续激励。
受迫振动包含和稳态振动。
在振动开始一段时间内所出现的随时间变化的振动,称为瞬态振动。
经过短暂时间后,瞬态振动即消失。
系统从外界不断地获得能量来补偿阻尼所耗散的能量,因而能够作持续的等幅振动,这种振动的频率与相同,称为稳态振动。
系统受外力或其他输入作用时,其相应的输出量称为。
当外部激励的频率接近系统的固有频率时,系统的将急剧增加。
激励频率等于系统的时则产生共振。
在设计和使用机械时必须防止共振。
(3)自激振动:在非线性振动中,系统只受其本身产生的激励所维持的振动。
自激振动系统本身除具有振动元件外,还具有非振荡性的能源、调节环节和反馈环节。
因此,哈工大机械振动基础大作业不存在外界激励时它也能产生一种稳定的周期振动,维持自激振动的交变力是由运动本身产生的且由反馈和调节环节所控制。
振动一停止,此交变力也随之消失。
自激振动与无关,其频率等于或接近于系统的固有频率。
如飞机飞行过程中机翼的颤振、工作台在滑动导轨上低速移动时的、摆的摆动和琴弦的振动都属于自激振动。
6. 振动的应用:下面,我想选取一个巧妙运用机械振动的机械,来进行进一步的说明:分选及混合振动机:由于振动筛分在筛分过程中各个物料颗粒均处于运动状态,且在筛面上作抛掷运动,因而筛分效率高,故在砂处理系统中基本上都采用振动筛。
但目前所用的振动筛基本上只有直线振动筛和单轴圆振动两种机型,这两种筛子适用于新砂和水分不高的旧砂筛分。
振动筛是一种多行业、用途广泛的筛分设备,在一定的条件下它在砂处理中的应用更显示出其优越性。
目前国内砂处理线上应用的多是中小型振动筛,国外已有每小时处理旧砂能力达700吨的直线振动筛。