线一级倒立摆的LQR稳摆控制(Simulink仿真)
自动化实验-倒立摆实验-附仿真结果图
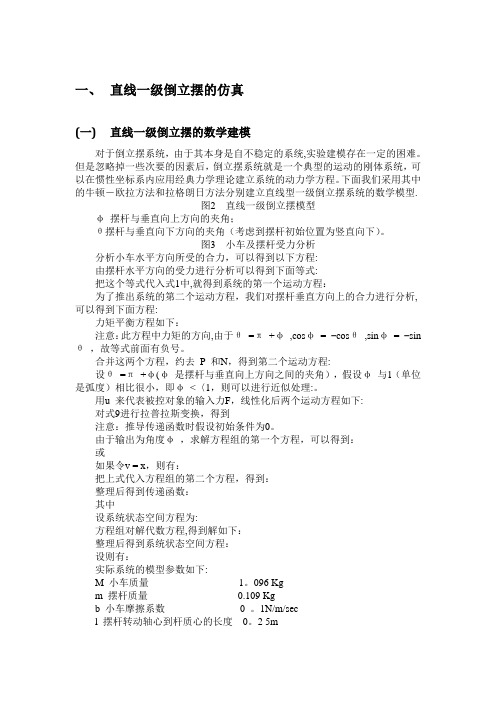
一、直线一级倒立摆的仿真(一)直线一级倒立摆的数学建模对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难。
但是忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。
下面我们采用其中的牛顿-欧拉方法和拉格朗日方法分别建立直线型一级倒立摆系统的数学模型.图2 直线一级倒立摆模型φ摆杆与垂直向上方向的夹角;θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)。
图3 小车及摆杆受力分析分析小车水平方向所受的合力,可以得到以下方程:由摆杆水平方向的受力进行分析可以得到下面等式:把这个等式代入式1中,就得到系统的第一个运动方程:为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:力矩平衡方程如下:注意:此方程中力矩的方向,由于θ=π+φ,cosφ= −cosθ,sinφ= −sin θ,故等式前面有负号。
合并这两个方程,约去P 和N,得到第二个运动方程:设θ=π+φ(φ是摆杆与垂直向上方向之间的夹角),假设φ与1(单位是弧度)相比很小,即φ<〈1,则可以进行近似处理:。
用u 来代表被控对象的输入力F,线性化后两个运动方程如下:对式9进行拉普拉斯变换,得到注意:推导传递函数时假设初始条件为0。
由于输出为角度φ,求解方程组的第一个方程,可以得到:或如果令v = x,则有:把上式代入方程组的第二个方程,得到:整理后得到传递函数:其中设系统状态空间方程为:方程组对解代数方程,得到解如下:整理后得到系统状态空间方程:设则有:实际系统的模型参数如下:M 小车质量1。
096 Kgm 摆杆质量0.109 Kgb 小车摩擦系数0 。
1N/m/secl 摆杆转动轴心到杆质心的长度0。
2 5mI 摆杆惯量0。
0034 kg*m*m把上述参数代入,可以得到系统的实际模型。
摆杆角度和小车位移的传递函数:摆杆角度和小车加速度之间的传递函数为:摆杆角度和小车所受外界作用力的传递函数:以外界作用力作为输入的系统状态方程:(二)倒立摆的PID调节:经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型。
直线一级倒立摆的自动起摆与稳摆控制

直线一级倒立摆的自动起摆与稳摆控制(Simulink仿真)通过对倒立摆系统的力学及运动学分析,建立系统的非线性数学模型为可见,直线一级倒立摆为单输入双输出系统,利用Simulink可建立上式的框图模型,如图1所示。
图1 直线一级倒立摆系统的非线性Simulink模型倒立摆的起摆问题,是控制理论中的一个经典实验,其实质是倒立摆系统从一个稳定的平衡状态(垂直向下)在外力的作用下自动转移到另一个平衡状态(垂直向上)。
在这个过程中,要求起摆快速,但又不能过于超调。
由于输入、输出之间的非线性,许多常用的线性控制理论都不适用。
基于非线性理论,目前常用的几种起摆方法为:Bang-Bang控制、能量控制、仿人智能控制等。
这里采用Bang-Bang控制作为起摆方法,LQR控制作为稳摆方法,Simulink框图如图2所示。
图2 倒立摆自动起摆控制Simulink框图(Bang-Bang + LQR)图2中,子系统“Inverted Pendulum”是直线一级倒立摆的非线性模型,如图1所示;S函数“ang_proc”模块用于摆杆角度的处理,即将任意角度信号转换为“ -π ~ π”之间的对应值;子系统“Bang-Bang Controller”为Bang-Bang控制器;子系统“LQR Controller”为LQR 控制器。
双击“Bang-Bang Controller”模块可打开Bang-Bang控制器框图如下:图3 Bang-Bang控制器框图图3中,bang_controller是为实现Bang-Bang控制算法而编写的S函数,信号Ang_s是Bang-Bang控制切换角,F_bang是Bang-Bang控制作用力。
双击“LQR Controller”子系统,打开LQR控制器框图如下:图4 LQR控制器框图运行图2中的仿真框图,则基于Bang-Bang控制和LQR控制算法的直线一级倒立摆自动起摆控制效果如图5所示。
单级倒立摆的LQR控制和DMC控制Matlab仿真比较

,一 舶 ~。Q l
、 ● ●
~、
本 文 以 一 阶 直 线 倒 立 摆 实 验 对 象 , 首 先 在 Malb 的 t a
Smui i lk环 境 下 , 计 L n 设 QR控 制 器 , 真 所 建 立 的 倒 立 摆 模 型 , 仿
并 对 实 验 结 果 进 行 分 析 ,发 现 L QR控 制加 权 阵 Q 和 R很 难 确
J y :( - (- + y XAUT U △
J
i
f厂一 ~ \
/ ,
/
I I ]' ti ,i j
穗
用Y 替 , 令 代 并
d △ U
一 = 求得 : o,
)其 中 C [ , = 1 0… 0 ]
aU C ( + 1 = A A X) ( A
/
角 懂
√ ∑[ 』 )T H ] ∑ A ( 一) 的最小值来确 : ( 一( ) + ([ u H 7 ( 叫 k ) k ]
i= I i; I
/
.
定的 , 以使 系统 在 未 来 某 个 时 刻 的 输 出 值尽 可能 接 近 期 望 值 。
指标函数也可简记为 :
c ntol d si d o rl er e gn an DMC co tol r esgn n A丁L n r l d i i M e AB/ M U J e i nmen sn e nv re pen lm sat sp e SI LNK nvr o ton a igl i e td duu t e— ac
( 误 差校 正 3)
由 于 对象 及环 境 的不 确 定 性 , k时 刻 实 施 控 制 作 用 后 , 在 在 k +l时刻 的 实 际输 出 y k 1 与 预 测 输 出y )Y (+ )a △u (+ ) (+1= o 7+ , () 一 定相 等 , 此 构 造 预 测误 差 不 因
(完整word版)一级倒立摆的Simulink仿真

单级倒立摆稳定控制直线-级倒立摆系统在忽略了空'(阻力及各种摩擦Z后,町抽象成小车和匀质摆杆组成的系统,如图1所示。
图2控制系统结构假设小车质量M=0.5kg,匀质摆朴质量m=0.2kg,摆朴长度21 =0.6m, x(t)为小车的水半位移,〃为摆杆的角位移,g = 9.8m/s2o控制的目标是通过外力u⑴使得摆直立向上(即&(t) = 0) o该系统的非线性模型为:(J +inl‘)典(nilcos^)&= niglsin^ (ml cos。
)翼(M其中J二一ml+ m)&= (mlsin0)6^ + u一、非线性模型线性化及建立状态空间模型因为在工作点附近(& = 0.必0)对系统进行线竹:•化,所以可以做如下线性化处理: 03 Q1sin0« 0 --------- 、COS&Q 1-----------------3! 2!当e很小时,由COS0V sine的幕级数展开式可知,忽略高次项后, 可得cos0~l, sin0=0, 0Z 2=0:因此模型线性化后如下:(J+nil A2)0r z +mlx z z =mgl0 (a)取系统的状态变量为% = x,x2 =仪X3 = x4=灰输出y = [x OF包扌舌小车位移和摆杆的角位移.由线性化后运动方程组得故空间状态方程如下:■010 0 ■「xT■ ■x2*00-2.6727 0x21 1.8182 x3f =000 1x3+0_x4J|_x40031.1818 0-4.5455uml0f r + (M+m) x''二u (b) 其中J = -ml3■ ■ xl ■ ■Xx2x1 x30 x4&Y=xlx3X1/二x'=x2—沁—册4(M + m) 一3m44(M + m) - 3m u3(M +m)g4(M + m)l 一3ni-34(M + m)l 一311119 1 00 ''xlM00 -3mg0am xl x2‘ _4(M + m) 一3m x2 x3* ~00 01x3x4J00 3(M + m)g0[_x44(M + m)l - 3ml 044(M + m) - 3m 0一34(M + m)l - 3nil二. 通过Matlab 仿真判断系统的可控与可观性,并说明其物理意义。
直线一级倒立摆的PID和LQR控制及其仿真

KEY WORDS: Linear inverted pendulum, Control, PID, LQR, simulation
BY NB GONG
II
华北电力大学毕业设计(论文)
目
录
摘 要 ........................................................................................................................................... I ABSTRACT ..................................................................................................................................... II 第 1 章:绪论 .................................................................................................................................. 1 1.1 倒立摆简介......................................................................................................................... 1 1.1.1 倒立摆分类.............................................................................................................. 2 1.1.2 倒立摆的特性......................................................................................................... 2 1.1.3 倒立摆的控制目标................................................................................................. 3 1.1.4 倒立摆的控制方式................................................................................................. 3 1.2 倒立摆控制研究的发展及其现状.................................................................................... 4 1.3 本文的主要内容................................................................................................................ 7 第 2 章:直线一级倒立摆系统数学模型....................................................................................... 8 2.1 直线一级倒立摆系统的物理模型.................................................................................... 8 2.2 直线一级倒立摆系统的数学模型.................................................................................... 9 2.3 直线一级倒立摆系统的系统分析.................................................................................. 12 2.3.1 直线一级倒立摆系统的系统稳定性分析 ........................................................... 12 2.3.2 直线一级倒立摆系统的系统能控性、能观性分析 ........................................... 14 第 3 章:直线一级倒立摆系统的 PID 控制及仿真..................................................................... 16 3.1 PID 控制概述 .................................................................................................................... 16 3.2 PID 的控制规律、原理 .................................................................................................... 17 3.3 PID 参数整定 .................................................................................................................... 17 3.4 直线一级倒立摆双闭环 PID 控制算法 ........................................................................... 18 第 4 章:直线一级倒立摆系统的线性二次最优控制及仿真..................................................... 24 4.1 线性二次最优控制简介.................................................................................................. 24 4.2 直线一级倒立摆 LQR 控制算法及仿真 ......................................................................... 26 结 论 ........................................................................................................................................ 35 参考文献 .......................................................... 36 致 谢 ........................................................................................................................................ 38
倒立摆控制系统的Simulink仿真
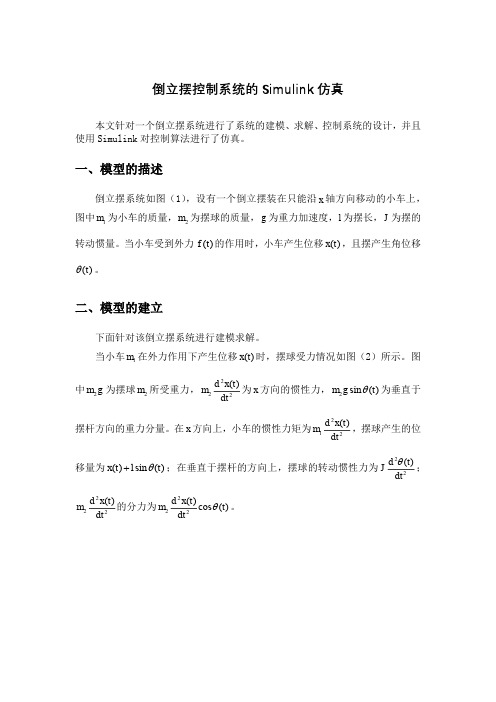
倒立摆控制系统的Simulink 仿真本文针对一个倒立摆系统进行了系统的建模、求解、控制系统的设计,并且使用Simulink 对控制算法进行了仿真。
一、模型的描述倒立摆系统如图(1),设有一个倒立摆装在只能沿x 轴方向移动的小车上,图中1m 为小车的质量,2m 为摆球的质量,g 为重力加速度,l 为摆长,J 为摆的转动惯量。
当小车受到外力()f t 的作用时,小车产生位移()x t ,且摆产生角位移()t θ。
二、模型的建立下面针对该倒立摆系统进行建模求解。
当小车1m 在外力作用下产生位移()x t 时,摆球受力情况如图(2)所示。
图中2m g 为摆球2m 所受重力,222()d x t m dt 为x 方向的惯性力,2sin ()m g t θ为垂直于摆杆方向的重力分量。
在x 方向上,小车的惯性力矩为212()d x t m dt ,摆球产生的位移量为()sin ()x t l t θ+;在垂直于摆杆的方向上,摆球的转动惯性力为22()d t J dt θ;222()d x t m dt的分力为222()cos ()d x t m t dt θ。
图(1)装有倒立摆的小车 图(2)倒立摆受力图根据牛顿运动定律,按照力的平衡原理,可以分别列出该系统在x 方向上和垂直于摆杆方向上的的运动方程222122222()()[sin ()]()d x t d x t d l t m m m f t dt dt dt θ++=(1) 222222()()cos ()sin ()d t d x t J m l t m lg t dt dtθθθ+= (2) 三、模型的求解3.1微分方程组的求解联立式(1)、(2),经过方程组的恒等变形得2222222122222()()2[()cos ()]sin 2()2sin ()()2()d x t d t m m J m l t m l g t Jm l t dt dtJf t θθθθ+-=-++ (3) 2222222212221222()()[cos ()()]sin ()cos ()()()sin ()()d t d t m l t m m J m l t t dt dtm m m lg t m lf t θθθθθθ-+=-++ (4) 由式(3)、(4)令''121343()(),(),()(),()()x t t x x t x t x t x t x t θ====,可建立如下的微分方程组进行求解'12'2222221222222122'34'222422222122()()1()()(sin ()cos ()()()sin ()cos ()()())()()1()()(sin 2()2sin ()()2())2[()cos ()]x t x t d t x t x m l t t m m m lg t m l t m m J dt m lf t x t x t d t x t m l g t Jm l t Jf t m m J m l t dt θθθθθθθθθ⎧=⎪⎪=-+⎪-+⎪+⎨==-+++-⎪⎪⎪⎪⎩3.2控制系统的分析与设计在该模型中,对该倒立摆系统实施角度环、速度换的控制,并假设小车在运行过程中受到空气阻力,阻力大小与小车的速度成正比。
基于LQR理论的直线单级倒立摆PID控制仿真.doc
宁波理工学院哲尊方话衣投副案彼仿E题目基于LQR理论的直线单级倒立摆PID控制仿真项目成员 _____________ 蒋嘉楠、钱品武、刘元晟 __________ 专业班级 ________________ 自动化091 ___________________ 指导教师 ___________________ 垫I ______________________ 分院 _____________________ 信息分院___________________ 完成日期 ________________ 12年5月____________________*项目组成员 (2)1课程设计目的 (2)2课程设计题目描述和要求 (2)3课程设计报告内容 (2)3. 1、线性二次最优控制LQR基本理论 (2)3.2、系统状态方程 (3)3.3、程序代码 (4)3.4、系统调试和结果分析 (5)4 .总结 (7)5.参考书目 (7)项目组成员基于LQR理论的直线单级倒立摆控制仿真1. 课程设计目的设计倒立摆二次型最优控制器,通过MATLAB仿真和实际系统实验,实现对倒立摆的稳定控制。
建立模型,确定参数,进行控制算法设计、系统调试和分析等步骤实现。
2. 课程设计题目描述和要求仿真要求:对论文中的LQR理论进行验证,同时•通过控制变量对离散系统进行优化。
3. 课程设计报告内容3. 1、线性二次最优控制LQR基本理论LQR控制器是应用线性二次型最优控制原理设计的控制器。
它的任务在于,当系统状态由于任何原因偏离了平衡状态时,能在不消耗过多能量的情况下,保持系统状态各分量仍接近于平衡状态。
线性二次型最优控制研究的系统是线性的或可线性化的,并且性能指标是状态变量和控制变量的二次型函数的积分。
线性二次最优控制LQR基本原理为,由系统方程:X=AX+Bu 确定下列最佳控制向量的短阵K:u(t) = -K^X(t)使得性能指标达到最小值:J = [(X r QX +u r Ru)dt式中:Q-一正定(或正半定)厄米特或实对称阵;R-一为正定厄米特或实对称阵。
直线一级倒立摆MATLAB仿真报告
1便携式倒立摆实验简介倒立摆装置被公认为是自动控制理论中的典型试验设备,是控制理论教学和科研中不可多得的典型物理模型。
本实验基于便携式直线一级倒立摆试验系统研究其稳摆控制原理。
1.1主要实验设备及仪器便携式直线一级倒立摆实验箱一套控制计算机一台便携式直线一级倒立摆实验软件一套1.2便携式倒立摆系统结构及工作原理便携式直线一级倒立摆试验系统总体结构如图1所示:图1 便携式一级倒立摆试验系统总体结构图主体结构包括摆杆、小车、便携支架、导轨、直流伺服电机等。
主体、驱动器、电源和数据采集卡都置于实验箱内,实验箱通过一条USB数据线与上位机进行数据交换,另有一条线接220v交流电源。
便携式直线一级倒立摆的工作原理如图2所示:图2 便携式一级倒立摆工作原理图数据采集卡采集到旋转编码器数据和电机尾部编码器数据,旋转编码器与摆杆同轴,电机与小车通过皮带连接,所以通过计算就可以得到摆杆的角位移以及小车位移,角位移差分得角速度,位移差分可得速度,然后根据自动控制中的各种理论转化的算法计算出控制量。
控制量由计算机通过USB数据线下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成闭环,从而可以实现摆杆直立不倒以及自摆起。
2便携式倒立摆控制原理方框图便携式倒立摆是具有反馈功能的闭环系统,其控制目标是实现在静态和动态下的稳摆。
当输入量为理想摆角,即∅∅=0时,偏差为0,控制器不工作;当输入量不为理想摆角时,偏差存在,控制器做出决策,驱动电机,使小车摆杆系统发生相应位移,输出的摆角通过角位移传感器作用于输出量,达到减小偏差的目的。
根据控制原理绘制出控制方框图如图3所示:图3 便携式一级倒立摆控制原理方框图3建立小车-摆杆数学模型便携式倒立摆系统主要由小车、摆杆等组成,它们之间自由连接。
小车可以在导轨上自由移动,摆杆可以在铅垂的平面内自由地摆动。
在忽略了空气阻力和各种摩擦之后,可将便携式倒立摆系统抽象成小车和匀质杆组成的刚体系统,在惯性坐标内应用经典力学理论建立系统的动力学方程,采用力学分析方法建立小车-摆杆的数学模型。
LQR直线一级倒立摆控制
摘要:在倒立摆系统的数学模型基础上,对系统进行了性能分析。
采用LQR对一级倒立摆进行了最优控制器的设计,并将其应用于倒立摆实际控制中,实时控制效果良好。
关键词:LQR倒立摆,实时控制An Lin ear In verted Pen dulum Con trol Based on LQRXie Lirong ,Wang Zhiyong ,Wang Li b5E2RGbCAPAbstract:In this paper,on the base of the model of the sin gle in verted pen dulum,an alysy the capability of the system.An LQR -based on optimal con trol system is desig ned used to the actual control of an in verted pen dulum and acquire a good effect.p1EanqFDPwKeywords:LQRInverted Pendulum,Real Control0引言倒立摆系统是非线性、强藕合、多变量和自然不稳定的系统。
线性二次型最优控制<Linear Quadratic Regulator —LQR问题在现代控制理论中占有非常重要的位置。
由于线性二次型<LQ)性能指标易于分析、处理和计算,而且通过线性二次型最优设计方法得到的控制系统具有较好的鲁棒性与动态特性等优点,线性二次型在控制界得到普遍重视。
运用LQR对倒立摆进行最优控制系统,并从实时控制效果出发,DXDiTa9E3d1倒立摆系统分析深圳固高公司研制开发的一级直线倒立摆GIP-100-L ,它是一个单输入多输出的四阶控制系统,结构组成如图1所示。
RTCrpUDGiT图1 倒立摆系统构成1.1 倒立摆系统模型对倒立摆系统进行受力分析 [1]可以得到系统的状态空间表达式为:XB-0 1 0(T XVX0 0 0 0 1XL'亦0 0 0 1o' H!■0 29A 03)—-J_1 0 0 o -XVr0 1 0_ 01.2 倒立摆系统稳定性分析对式<1)所描述的倒立摆系统进行阶跃响应分析 [2]。
直线倒立摆系统的LQR控制器设计及仿真_毕业设计精品
直线倒立摆系统的LQR控制器设计及仿真_毕业设计精品1.引言直线倒立摆系统主要由一个质量块和一个固定的轨道组成,质量块可以在轨道上自由运动。
该系统的目标是在面对各种扰动时保持质量块的平衡。
LQR控制器是一种优化控制方法,可以通过调整控制器的参数来实现系统动态响应的优化。
2.直线倒立摆系统建模m*x''+b*v+m*g=f-u在LQR控制器设计过程中,需要将系统的动力学方程转化为状态空间模型。
定义状态变量为x1=x,x2=x',那么系统的状态空间模型可以表示为:x1'=x2x2'=(1/m)*(f-u-b*x2-m*g)3.LQR控制器设计LQR控制器设计的目标是通过调整控制器的参数来最小化系统的性能指标J。
在直线倒立摆系统中,我们可以选择以能耗作为性能指标,即J = ∫(u(t)^2)dt。
那么LQR控制器设计的目标是最小化能耗。
LQR控制器设计方法的关键是设计系统的状态反馈增益矩阵K。
具体的设计步骤如下:1)将系统的状态空间模型表示为矩阵形式:x'=Ax+Buy=Cx+Du其中,A为状态转移矩阵,B为输入矩阵,C是输出矩阵,D为直接递增矩阵。
2) 根据系统的状态空间模型计算系统的LQR控制器增益矩阵K。
增益矩阵K可以通过解代数矩阵Riccati方程得到:K=(R+B'*S*B)^(-1)*B'*S*A其中,S为Riccati方程的解。
3) 计算系统的控制器增益矩阵L。
增益矩阵L可以通过解代数矩阵Riccati方程得到:L=(R+B'*S*B)^(-1)*B'*S*C4.LQR控制器仿真在设计完成LQR控制器之后,可以进行仿真实验来验证控制器的效果。
可以使用MATLAB或Simulink来进行仿真。
在仿真实验中,需要设置各个参数的初始值,并且加入一些扰动以测试控制器的稳定性。
通过观察系统的状态变量和控制力的响应曲线,可以评估控制器的性能。