小型整秆式甘蔗收割机切割系统的改进与试验
甘蔗联合收割机技术难题分析与改进
甘蔗联合收割机技术难题分析与改进摘要:目前我国甘蔗生产机械化水平很低,主要是由于甘蔗联合收割机的研发技术水平较低,无法解决实际生产中遇到的技术难题,限制了甘蔗生产的发展,本文分析了现有甘蔗联合收割机存在的技术问题,提出了新的设计思路和技术措施。
关键词:甘蔗;联合收割机;技术;难题;改进引言由于生产条件恶劣,作业条件复杂,难以实现甘蔗生产的机械化和自动化,尤其是收割作业,目前还仅处于人工作业阶段,极大地限制了甘蔗生产效率的提高。
甘蔗收割技术已成为甘蔗生产机械化过程中最棘手的技术难题。
目前甘蔗的栽培和收获主要依靠人力,从播种到收获基本依靠人力。
它不紧,劳动强度高,生产效率低,也制约着整个经济产业链生产的发展。
由于我国甘蔗主产区在南方,地形以山地和狭窄为主,甘蔗长度不规则,弯直、大小高、高低不平,增加了机械收割的难度。
通过长期的调查研究,笔者认为甘蔗机械收获急需解决的6个技术问题。
1如何实现甘蔗破头率低的技术要求由于甘蔗是一次采收三年的作物,如果机械采收时甘蔗根部的扦插口不均匀,会损伤根部的甘蔗苗,影响第二年甘蔗的发芽率,降低采收率,一般要求将破头率控制在5%的范围内。
据调查,目前甘蔗收割机的收割和切割方式大多是通过水平移动多个高速旋转的刀片来切割甘蔗茎秆。
这种切割方法的缺点是:①刀刃不能做得太锋利,否则就是高速在旋转的情况下,地里的石头会很快被磨边,所以刀片只能做成钝刀片,不利于切割甘蔗茎时获得平整的切口;②由于刀片高速旋转,慢速平移,同一根部切口容易被多刀切割,造成切口不均匀。
因此,传统的切割方式破头率较高,不能满足实际生产要求。
为了降低甘蔗收割过程中的破头率,获得平整的根茎切割口,切割刀必须锋利,每次切割必须一刀。
因此,可以考虑采用往复循环、向前缓慢运动的切割方式,刀片可以做成镹刀样,切口锋利,一刀就能顺利切割甘蔗根茎。
其原理是模仿人工一刀切根的方式。
这种方法的缺点是切割机构复杂,收割过程中甘蔗机械的移动速度略有降低,但基本可以解决破头率的技术问题。
甘蔗榨汁机械:切蔗机的产品改进和技术创新
甘蔗榨汁机械:切蔗机的产品改进和技术创新甘蔗榨汁机械是现代餐饮和食品加工行业中常见的设备之一。
切蔗机作为甘蔗榨汁机械中的一个重要组成部分,在提高甘蔗榨汁效率和品质方面发挥了关键作用。
随着科技的不断进步和市场需求的变化,切蔗机的产品改进和技术创新变得尤为重要。
本文将从产品改进和技术创新两个方面探讨甘蔗榨汁机械中切蔗机的最新发展。
一、产品改进1. 提高切蔗机的切割效率切割效率是切蔗机的核心指标之一。
为了提高生产效率,厂商们逐步将传统的手动操作改造为电动操作,并采取了更加高效的切割机构设计。
例如,采用多刀片组合的切割结构,使得一次能够切割更多的蔗段,在同样的时间内提高切割效率。
2. 优化切蔗机的切割质量切割质量是评价切蔗机性能的重要指标之一。
在产品改进中,我们可以使用更优质的刀片材料,提高切割刃的硬度和锋利度,从而保证切割蔗茎时的切割质量。
另外,切割过程中还可以增加槽设计,以便更好地控制蔗茎的切割形状和尺寸。
3. 提升切蔗机的稳定性和耐用性为了提高切蔗机的稳定性和耐用性,厂商们不断进行产品改进。
采用更稳定的结构设计和材料,增加切蔗机的整体强度;加强对关键部件的结构设计和加工工艺,增强其耐用性;并引入智能化控制系统,实时监测设备状态,及时进行维护和保养,以确保切蔗机的正常运行。
二、技术创新1. 引入先进的传感器技术随着传感器技术的发展,我们可以将更多的传感器应用于切蔗机中,实现对切割过程的精确控制和监测。
例如,通过安装压力传感器,可以实时监测切割蔗茎的压力大小,以便调整刀片的切割力度,从而提高切割质量。
还可以通过温度传感器检测切割过程中的温度变化,防止因过热而对设备造成损坏。
2. 应用自动化技术自动化技术的应用可以进一步提高切蔗机的效率和生产力。
通过引入自动化控制系统,我们可以实现切蔗机的自动启动、停止、调速和切割参数的调整。
此外,可以采用机械臂和输送带等自动化装置,自动将甘蔗送入切蔗机并将切割好的甘蔗薄片送出,减少了人工操作和生产环节,提高了生产效率。
小型甘蔗收割机切割台架试验台的设计与实验研究

收割机整机的制造提供依据 。
关键词 :小型甘蔗收获机 ;切割 台架 ;设 计制造 中图分类号 :¥2 . 3 2 55 文献标识码 :A 文章编号 :10 —38 (0 1 2—04- 0 1 8 1 2 1 )2 0 4
De i n a pe i nt lAn l ss f r t nc p r m e t l sg nd Ex r me a a y i o he Be h Ex e i n a
21 0 1年 1 1月
机床与液压
MACHI NE TO0L & HYDRAUL CS I
NO . 0l V2 1 Vo . 9 No 2 I3 . 2
第3 9卷 第 2 2期
D :1 . 9 9 jis. 0 1—3 8 . 0 2 . 0 OI 0 3 6 /.sn 10 8 12 1.2 0 2 1
切 割台架 部分是 甘蔗收割机的重要组成部分 ,包
括砍蔗 、扶蔗滚 、压 蔗输送 辊和提 升装置 。台架部分
文 中的台架试验机构需要满足甘蔗切割刀盘的旋 转 、台架 的提升 和甘蔗 与切割刀盘相对进给 3 个运 动 动作 。设计 中首先确定 了机构 的空 间位置并在三维建
模软件 U G中建立模 型 ,如 图 1 示。
小型甘蔗收割机切割台架试验台的设计与实验研究
薛斌
(.广西 大学机械 工程 学院 ,广 西南 宁 500 1 304;2 .金 华职 业技 术 学 院 ,浙 江金 华 3 10 ) 207
摘要 :针对甘 蔗收割机 台架 部分 的研 发需 要 ,开发模块化的模拟试验 台。设计 台架液压 系统并制造 出液压泵站 ,通过 试验进行液压提升缸同步情况的测试 、甘蔗切割质量 、刀盘轴 向振动分析 和液 压执行元件 的参数特性分 析 ,为下一步 甘蔗
基于动态性能的小型甘蔗收割机砍蔗刀盘结构优化
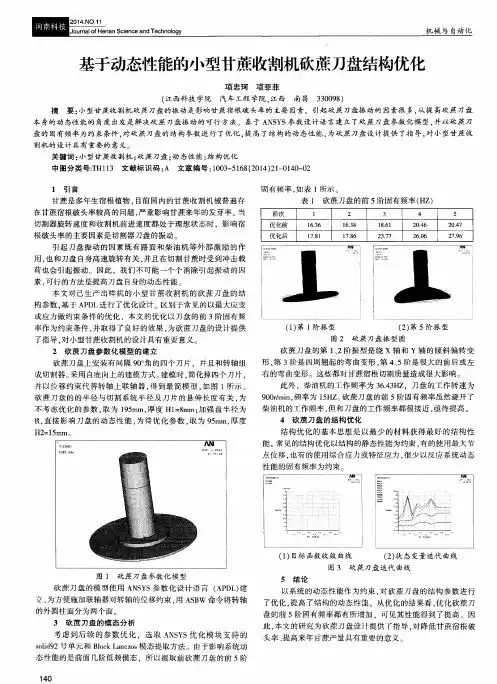
考虑 到后 续 的参数 优化 ,选 取 A N S Y S优化 模 块支 持 的
s o l i d 9 2号 单 元 和 B l o c k L a n c z o s 模 态 提 取 方 法 。 由于 影 响 系统 动 态 性 能 的 是前 面几 阶低 频模 态 ,所 以 提取 前 砍 蔗 刀 盘 的前 5阶
结 构 优 化 的 基 本 思 想 是 以最 少 的材 料 获 得 最 好 的结 构 性
能。 常见 的结构优化 以结构的静态性能 为约束 , 有 的使用最大节
点位移 , 也 有 的使 用 综 合 应 力 或特 征应 力 , 很 少 以反 应 系统 动 态
( 2 ) 状 态 变量 迭 代 曲 线
以系统的动态 性能作为约束 , 对 砍蔗刀盘的结构参数 进行 了优化 , 提高 了结构 的动态性能 。从优化 的结果看 , 优化砍蔗刀 盘的前 5阶固有频率都有所增加 ,可见其性能得到了提高 。因 此, 本文 的研究为砍蔗刀盘设计提供 了指导 , 对降低甘蔗宿根破
头率 、 提 高 来 年 甘 蔗 产量 具有 重 要 的意 义
2 0 . 4 7
2 7 . 9 6
用, 也和刀盘 自身高速旋转有关 , 并且在切割甘蔗 时受 到冲击载 荷也会引起振动 。因此 ,我们不可 能一个个 消除引起振动 的因
素, 可 行 的方 法 是 提 高 刀盘 自身 的动 态 性 能 。 本 文 对 已 生 产 出样 机 的 小 型 甘 蔗 收 割 机 的 砍 蔗 刀 盘 的结
9 0 0 r / mi n , 频率为 1 5 H Z 。 砍 蔗 刀 盘 的 前 5阶 固有 频 率 虽 然 避 开 了
柴油机的工作频率 , 但 和刀盘 的工作频率都很 接近 , 亟待提高 。
整杆式高效智能甘蔗收割机的研究与应用
整杆式高效智能甘蔗收割机的研究与应用摘要:本文依据当前甘蔗收割设备应用中存在的问题,研究整杆式高效智能甘蔗收割机,通过设置自动化控制关键模块,研发和完善在线自动扶蔗、导入、夹固、切根(刀盘自动升降)、断尾、传送、剥叶(自动调整)、甘蔗收集、暂存等功能,有效提高收割效率。
关键词:甘蔗收割机;整杆式;高效智能我国甘蔗主要分布在北纬24°以南的地区,其中以广东、广西、海南、云南等省区种植面积最大,大部分地区甘蔗收割以传统人工收割为主,劳动强度大,效率低。
甘蔗收割机械化滞后已成为我国甘蔗产业化发展的瓶颈问题,加快甘蔗生产的机械化程度发展已十分迫切。
近年来我国先后引进了数十台国外大型和中型切段式甘蔗联合收割机,使用中存在机器系统配套不合理、农机与农艺技术不匹配等问题。
在国家的支持下,自主研发机型开始已取得较大发展,但甘蔗收割机大体还存在一些关键技术问题没有解决。
针对上述问题,急需针对符合我国农艺要求的甘蔗联合收割机的研究。
1、甘蔗收割机种类目前主要甘蔗收获机应分为切断式甘蔗联合收割机和整杆式甘蔗联合收割机两类。
切段式甘蔗收割机在收割的同时完成切段工作,甘蔗从甘蔗机出来时是成段的,可直接用于榨糖。
切段式甘蔗收割机主要完成以下工序:扶蔗、切梢、收割、切段、清选、装载、蔗叶切碎还田等工序。
此类切段式甘蔗收割机适应坡度小于15°的地块,突出优点就是高效便捷、配套动力大、实现的功能多、基本可以实现生产的自动化以及全面机械化。
弊端有:宿根破头率大、含杂率高,工作可靠性低、甘蔗损耗率高,刀具维护差等问题。
且甘蔗收获必须在12小时内送到糖厂加工,否则将发生糖的损失和变质。
切断式甘蔗收获机受到糖厂加工设备、加工工艺等因素的制约。
整杆式甘蔗收割机生产出的甘蔗则是整根的,收割完成后可以直接进糖厂榨糖加工。
整杆式甘蔗收割机主要完成以下工序:在线自动扶蔗、导入、夹固、切根(刀盘自动升降)、断尾、传送、剥叶(自动调整)、甘蔗收集、暂存等功能,有效提高收割效率。
整秆式甘蔗收割机收割效果研究
整秆式甘蔗收割机收割效果研究张华伟;吴建明;张胜忠;赖振光;范业赓;李燕娇;周忠凤;陈荣发;吴宗猛;吴延勇;邓宇驰【期刊名称】《广西糖业》【年(卷),期】2024(44)2【摘要】广西蔗区生产上普遍使用中大型切断式收割机收割甘蔗,存在含杂率和损失率高、影响宿根蔗的生长和产量等问题,导致蔗区机械收割水平低,机收推进缓慢。
本研究利用中小型整秆式收割机开展甘蔗收割试验,分析其收割效果及对甘蔗品质和翌年宿根蔗生长的影响,结果发现,中小型整秆式收割机的甘蔗收割效率较高,单位时间内的收割效果相当于40个工人的砍收量,含杂率仅2.71%,损失率仅2.98%,留茬高度和破蔸率总体上优于人工砍收,未对甘蔗糖分、宿根蔗发株和生长造成不利影响,有较好的应用前景。
建议进一步加大中小型整秆式收割机研发和推广应用的支持力度,加强对收割效率、机械运行稳定性、倒伏甘蔗的收割、适合机收甘蔗品种和农机农艺融合技术等研究,并开展机械收割标准化基地建设与示范,多途径促进蔗区机收水平提升,为甘蔗生产上进一步优化升级和推广应用中小型整秆式收割机提供参考依据。
【总页数】4页(P93-96)【作者】张华伟;吴建明;张胜忠;赖振光;范业赓;李燕娇;周忠凤;陈荣发;吴宗猛;吴延勇;邓宇驰【作者单位】广西科创农业科技集团有限责任公司;广西农业科学院甘蔗研究所/广西甘蔗遗传改良重点实验室/农业农村部广西甘蔗生物技术与遗传改良重点实验室【正文语种】中文【中图分类】S225.53【相关文献】1.提高整秆式甘蔗收割机喂入速度的仿真试验及改进效果2.整秆式甘蔗收割机集堆装置重力自卸机构设计与仿真3.小型整秆式甘蔗收割机改进设计与试验4.小型整秆式甘蔗收割机切割系统的改进与试验5.整秆式甘蔗收割机剥叶过程仿真分析与试验因版权原因,仅展示原文概要,查看原文内容请购买。
小型甘蔗收获机切割系统的设计与试验
要 :切 割 系统 是 甘蔗 收 获 机 的 关 键 部 分 , 直 接 关 系 到 甘 蔗 的 切 割 质 量 以 及 砍 倒 后 甘 蔗 的 输 送 。根 据 “ 压
倒 一 切割 一 提 升输 送 ” 收 割模 式 的理 念 , 确 定切 割 系 统 整 体性 能 要 求 , 并在此 基础上确定 _ r切 割 系统 主要 部 件 : 压 蔗辊 、 切 割器 、 输送辊 、 夹 紧装 置 , 以及合 理 的整 体 布 局 和垂 直 提 升 方 案 。 在 切 割 系 统 试 验 平 台上 进 行 了 正 交
的作 用 , 切 断后 的甘 蔗 在螺 旋 提 升 装 置 和 压 蔗 辊 的共 同作 用 下 , 向后 输 送 至 物 流 通 道 人 口 , 由物 流 输 送 辊
夹 持 进入 物 流 系统 。 该 切 割 系统 主要 包 括 : 压蔗辊 、 切割器 、 螺 旋 杆 和 台架 ( 图 中未 画 出 , 用 于支 撑 切割 系统 各 部件 ) , 如 1
农 机 化 研 究
第 3期
小 型 甘 蔗 收 获 机 切 割 系 统 的 设 计 与 试 验
麻 芳 兰 ,杨 冰 心 ,刘 智 彪 ,王莉 莉 ,高建 立 ,李 尚平
( 1 .广 西 大学 机 械 工程 学 院 ,南 宁 摘 5 3 0 0 0 4;2 .钦 州 学 院 ,广 西 钦州 5 3 5 0 0 0)
1 小型甘 蔗收获机切 割系统整体方 案设计
“ 倒一 切 割一 提 升 输 送 ” 模 式 的 切 割 系 统 功 能 要求 : 将 所 有 甘 蔗 压倒 倾 至 一 定 角 度 后 , 切 割 器 进 行 切割 , 再 利用刀盘上 的螺旋提升装 置, 提 升 砍 断 的 蔗
甘蔗收获机的控制系统设计与优化
甘蔗收获机的控制系统设计与优化甘蔗是一种重要的经济作物,其收获过程一直以来都是人工操作。
然而,随着科技的进步和农业现代化的推进,甘蔗收获机的使用已经成为越来越普遍的选择。
甘蔗收获机的控制系统设计与优化是实现高效、精确收获的关键。
首先,甘蔗收获机的控制系统需要具备精确的定位功能。
在甘蔗田中,植株的分布密度不一,而且作物之间的干扰也较为复杂。
因此,控制系统应该能够通过传感器对甘蔗植株进行识别和定位,以确保机械手臂准确地收割甘蔗。
该系统可以使用计算机视觉技术,通过图像处理与分析,识别甘蔗的生长状态和位置,进而控制机械手臂的运动。
其次,甘蔗收获机的控制系统还需要实现对机械手臂的精细控制。
由于甘蔗的高度不一,机械手臂的伸缩和转动需要根据甘蔗的实际情况进行调整。
为此,控制系统中需要包含传感器来测量甘蔗植株的高度,并通过计算和控制器的反馈来调整机械手臂的运动。
同时,控制系统还可以优化机械手臂的设计,使其能够适应不同高度范围的甘蔗,提高机械手臂的灵活性和效率。
另外,甘蔗收获机的控制系统还需要考虑甘蔗的收割方式。
传统的收获方式是采用旋转刀片将甘蔗切割下来,但这种方式可能会造成甘蔗的损伤和浪费。
因此,控制系统可以引入激光或超声波传感器,精确地测量甘蔗的高度,然后控制机械手臂的动作,使刀片直接切割到甘蔗的基部,减少浪费和损伤。
此外,甘蔗收获机的控制系统还需要考虑安全性和稳定性。
机械手臂在操作过程中可能会遇到各种障碍物,如石头、树枝等,因此控制系统需要通过传感器来检测障碍物的存在,并及时采取避让措施。
此外,控制系统还应具备自我诊断和故障排查的功能,以确保甘蔗收获机的稳定运行,并及时修复任何可能出现的问题。
最后,甘蔗收获机的控制系统还应该具备数据记录和分析的功能。
通过记录甘蔗的生长情况、收获数据和机械手臂的运动路径等信息,可以为甘蔗的管理和优化提供参考。
利用数据分析技术,可以进一步优化机械手臂的运动路径和收割方式,提高甘蔗的收获效率和质量。
甘蔗收获机的结构优化及轻量化设计研究
甘蔗收获机的结构优化及轻量化设计研究甘蔗是世界上最重要的经济作物之一,主要用于生产糖、酒精和生物燃料。
甘蔗的收获是一个关键的环节,传统的人工收获方式效率低下且劳动强度大。
因此,甘蔗收获机的结构优化和轻量化设计对于提高甘蔗的收获效率和降低人力成本具有重要意义。
结构优化是指通过改变甘蔗收获机的零部件结构和配置,提高机械的稳定性、可操作性和可维修性,从而提高机械的工作效率和使用寿命。
首先,需要对甘蔗收获机的各个部件进行分析和优化设计。
例如,利用有限元分析方法对关键轴承和传动装置进行强度计算和优化设计,确保其能够在高负荷条件下正常工作。
其次,采用先进的材料和加工工艺,提高各个部件的耐磨性和抗腐蚀性,延长机械的使用寿命。
此外,还可以通过智能化控制系统的引入,提高甘蔗收获机的自动化程度,减少操作人员的劳动强度。
轻量化设计是指通过减少甘蔗收获机的整体重量,提高机械在甘蔗田间作业时的机动性和灵活性。
首先,需要对机械结构进行材料优化和加工工艺改进,利用高强度材料替代传统材料,同时通过优化零部件的结构设计,减少机械的自重。
其次,可以借鉴其他行业的轻量化设计经验,如航空航天、汽车工业等,将先进的轻量化技术和材料应用于甘蔗收获机的设计中。
此外,还可以结合电力推进技术,引入电动或混合动力的概念,减少机械的燃油消耗和排放。
甘蔗收获机的结构优化和轻量化设计研究不仅能提高甘蔗的收获效率和质量,还能降低劳动强度和能源消耗,具有重要的农业和环境意义。
然而,要实现这一目标,还需要充分考虑甘蔗种植的地理和气候条件,以及机械的实际作业环境。
同时,还需要与相关领域的专家进行合作,利用先进的计算机辅助设计和仿真技术,在不断优化和验证的基础上,实现甘蔗收获机的结构优化和轻量化设计。
总之,甘蔗收获机的结构优化和轻量化设计是提高甘蔗收获效率和降低人力成本的关键。
通过改进机械的零部件结构和配置,提高机械的稳定性和可操作性;引入先进的材料和加工工艺,增加机械的使用寿命;采用智能化控制系统,减少操作人员的劳动强度;以及通过轻量化设计,提高机械的机动性和灵活性。
整杆式甘蔗联合收割机应用示范工作方案
整杆式甘蔗联合收割机应用示范工作方案目前,我区各级农机部门在甘蔗主产区已推广10台整杆式甘蔗联合收割机,部分机具将于今年3月份开始投入生产应用示范。
为确保整杆式甘蔗联合收割机应用示范顺利进行,制定本方案。
一、指导思想以“三个代表”重要思想为指导,贯彻落实科学发展观,以促进农业增效、农民增收、减轻农民劳动强度为目标,通过开展整杆式甘蔗联合收割机应用示范,向广大蔗农和制糖企业宣传甘蔗收获机械,促进机具应用及改进、完善,加快突破甘蔗收获机械化“瓶颈”步伐。
二、工作目标(一)每台甘蔗收割机应用示范面积200亩以上。
(二)收集、掌握机具应用中存在的主要问题,为企业改进机具提出建议。
(三)与制糖企业、蔗农商讨推进甘蔗收获机械应用的合理化建议,为下一步机具推广应用打下基础。
三、工作内容(一)南宁、柳州、崇左、来宾、贵港、北海、防城港市和扶绥、武鸣、上思、柳城县农机部门组织购置整杆式甘蔗联合收割机的单位开展机具应用示范或召开现场演示会,多渠道多形式进行宣传,营造良好的氛围。
(二)与制糖企业沟通,积极争取制糖企业实行合理扣杂标准和机收甘蔗优先入厂政策。
(三)做好机具作业情况、发生故障等有关数据记录,向生产企业提出改进建议。
(四)建立示范基地,在新植蔗种植季节,引导农民按1.2米行距规范化、规模化种植,为机具在2009/2010年榨季投入应用提供良好作业条件。
四、工作进度安排(一)2009年2月,开展整杆式甘蔗联合收割机操作人员培训班;开展调查摸底,确定机具应用示范地块,为机具作业做好相关准备工作;与当地糖厂沟通,争取实行机收甘蔗合理扣杂标准和优先入厂政策。
(二)2009年3月至4月,开展甘蔗机收示范,通过多种形式大力宣传和示范。
(三)2009年5月,榨季结束后,总结工作,重点分析机具应用中存在的主要问题,向企业提出机具改进建议,推广收割机的合理化建议。
五、工作措施与要求(一)加强联系沟通,争取糖厂支持当地制糖企业的支持配合,是整杆式甘蔗联合机应用示范顺利进行的重要保证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表 1 2 种不同安装方式结果分析
Table 1 Result analysis of two different installation methods
固有参数 Inherent parameter
静变形量 Static deflection /mm
自然频率 Natural frequency /Hz
甘蔗的同时能避免较多重叠甘蔗引起堵塞。如图 2 所示为改进后的切割输送装置。 1.2 切割系统布局的改进
切割器刀盘的振幅对破头率有显著影响,振动 越小,破头率越低[16]。原样机切割系统前置,切割 器悬挂在车架上方的 2 个油缸上,来自发动机及剥 叶系统等振源的激励传递到切割器后,由于局部质 量较小,所以被激起的振幅较大,加剧宿根的破头 率。汽车结构有限元分析表明,汽车整机的振动在 前后轮间最小[17];Gupta C P 等[18]通过中置切割器 来改善其动态刚性。据此,改进后的切割系统布置 在收割机的前后轮之间。提升架上有 2 个铰链,前 面铰链与一端固定在机体上的提升缸连接,后面铰 链和车架铰接。
1.调节孔 2.提升缸 3.喂入辊 4.侧板 5.提升架 6.浮动辊 7.浮动 槽 8.连接板 1. Adjustment holes 2.Lifting cylinder 3.Feeding roller 4.Side plate 5.Lifting frame 6.Floating roller 7.Floating tank 8.Connecting plate
低为 4.7%,蔗茎合格率由原来的 51.0%提高到 82.5%,喂入量由原来 1.129 kg/s 提高到 1.894 kg/s。该文可为整秆
式小型甘蔗收获机的机械设计提供参考。
关键词:甘蔗;收割机;试验;切割系统;破头率
doi:10.3969/j.issn.1002-6819.2014.15.003
切割装置直接影响收割机的生产率、宿根破头 率、含杂率等主要性能指标和整机的可靠性[12-14]。 原样机采用双圆盘切割器,切断的甘蔗易堆积在喂 入口而不能顺利进入后续的物流通道。改进后(见 图 2)将切割器安装在提升架 5 的前端,在刀盘上 增加用橡胶包裹的螺旋提升秆以实现甘蔗的提升 和向后输送,还可防止高速旋转的螺旋秆对甘蔗的 损伤。另外,在螺旋上方和齿轮箱下方之间的刀轴 上增加橡胶拨片,限制甘蔗从两侧穿出。切割器刀 盘与蔗垄面的角度对割茬损失有较大影响[15]。原样 机刀盘角度是固定的,改进后在切割器两侧连接 2 块侧板,通过侧板上的调节孔可以方便的调整割刀 的角度。通过试验得到,当调节刀盘与蔗垄面成 10° 时切割质量最好。
响,设计切割器应该考虑减振措施。这些研究均取 得了很大进展,为甘蔗收获机的设计提供了依据。
本文从降低甘蔗收割机的破头率及提高甘蔗 的通过率出发,对原样机切割系统的切割输送装 置、布局和提升方式等进行改进,并在改进样机上 增加一个辅助喂入辊。通过振动测试系统对改进样 机刀盘的振动进行测试,并进行田间对比试验验证 该改进的合理性,以期为小型整秆式甘蔗收割机的 设计提供理论依据与技术支持。
第 15 期
麻芳兰等:小型整秆式甘蔗收割机切割系统的改进与试验
19
一对输送辊 6、7 及提升缸 2 组成。切割器前置, 通过提升机构悬挂在车架前方。收割机工作时,割 台上的压蔗秆 1 将前方甘蔗压至一定角度后,由双 圆盘切割器切断根部,在机器前进和刀盘高速旋转 的作用下及固定在车架上的喂入输送辊的夹持输 送下将蔗秆传送到通道内。提升缸 2 固定在割台导 轨上,用于提升切割器来适应不同的垄高作业。田 间试验发现,该样机存在割台可调性差、喂入量低 和破头率高等缺陷[11]。本文针对所述问题对原样机 切割系统进行局部改进和优化,并增加辅助喂入装 置,使其在收获作业中满足机械化收获的要求。 1.1 切割和输送装置的改进
图 2 改进后的切割系统 Fig.2 Cutting system after improvement
输送装置由一对喂入辊和一对输送辊组成。原 样机上下 2 对辊间的间隙是固定的,不利于较粗直 径或重叠甘蔗的输送。改进后喂入输送辊总成装配 到侧板 4 上,侧板上有支座,通过螺栓把喂入输送 辊总成固定在提升架 5 上。第二对辊的上辊 6 采用 浮动设计,通过连接板 8 可绕喂入辊 3 中心沿浮动 槽 7 浮动,从而可以增大上下辊间隙,在夹持输送
悬壁梁式的安装方式下,悬伸端 A 点在切割器 重力作用下的静变形为:
δst = mgC3 / 3EI 系统的自然频率为:
(1)
ωn = 3EI / mC3 悬伸端点处的刚度为:
(2)
20
农业工程学报
2014 年
K = 3EI / C3
(3)
式中:m 为切割器的质量,kg;C 为悬臂的长度,m;
E 为梁的弹性模量,GPa;I 为抗弯截面惯性矩,N/m。
从表 1 中可以看出,在相同条件下 A 点的变形 量大于 B 点,简支梁安装方式的自然频率和刚度均 高于悬臂梁的安装方式。改进后的布局提高了切割 器的动态刚性,降低刀盘振幅,有利于降低宿根破 头率。同时,切割系统中置使物流系统的高度不受 前桥的限制,既降低整机重心保持机器的平稳性, 又有利于物流的输送。 1.3 切割系统提升方式的改进
图 3 改进前后切割器的安装方式
Fig.3 Installation of cutter before and after improvement
改进前后 2 种布局方式可简化为如图 3 所示。 前后轮胎相当于 2 个支撑点,前者可视为悬壁梁式 的安装方式,后者可视为简支梁式的安装方式,根 据材料力学梁的弯曲与刚度理论[19]和机械振动理 论[20]分析可知:
注:a、b 分别为切割器安装位置距前后轮的距离,m;A、B 点为切割 器与车架作用点。 Note: a、b is respectively distance between the cutter position to the front and back of the tire, m; A、B are the point of action between cutter and frame.
1 切割系统的技术改进
广西大学研制的小型整秆式甘蔗收割机如图 1 所示,其切割系统由切割器 3、一对喂入辊 4、5 和
收稿日期:2013-11-16 修订日期:2014-07-01 基金项目:广西工信委项目(桂工信投资[2013]258 号);广西制造系统 与先进制造技术重点实验室科研项目(13-051-09S02)。 作者简介:麻芳兰(1976-),女,副教授,主要从事先进制造技术、 CAD/CAE 研究。南宁 广西大学机械工程学院,530004。 Email: 247987750@
第 30 卷 第 15 期
农业工程学报
18 2014 年 8 月
Transactions of the Chinese Society of Agricultural Engineering
Vol.30 No.15 Aug. 2014
小型整秆式甘蔗收割机切割系统的改进与试验
麻芳兰,韦荣发,范志达,赵 静
中图分类号:S225.5+3
文献标志码:A
文章编号:1002-6819(2014)-15-0018-07
麻芳兰,韦荣发,范志达,等. 小型整秆式甘蔗收割机切割系统的改进与试验[J]. 农业工程学报,2014,30(15): 18-24.
Ma Fanglan, Wei Rongfa, Fan Zhida, et al. Improvement and experiment on cutting system of small whole-stalk sugarcane harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(15): 18-24. (in Chinese with English abstract)
简支梁式的安装方式下,B 点在切割器重力作
用下的静变形为:
δst = mga2b2 / 3EIL 系统的自然频率为:
(4)
ωn = 3EIL / ma2b2 简支梁 B 点处的刚度为:
(5)
K = 3EIL / a2b2
(6)
式中:L 为前后轮的轮距,m。
将刀盘的安装尺寸代入以上公式,2 种不同安
装方式的结果对比如表 1 所示。
1.压蔗秆 2.提升缸 3.切割器 4、5.喂入辊 6、7.输送辊 1.Knock-down bar 2. Lifting cylinder 3. Cutter 4、5. Feeding roller 7. Conveyor roller
图 1 原样机简图 Fig.1 Schematic diagram of original prototype
4.9 ×10−9 EI
送速度,在割台前方增加一个辅助喂入辊。辊 1 的 圆周上等角度排列 8 组 V 形齿的喂入元件 2,喂入 元件通过螺栓固定在喂入辊上。辊筒圆周上喂入元 件间不规则的焊接分流片 3,当甘蔗根数较多或甘 蔗间相互缠绕严重时起到分流作用,整体结构如图 4 所示。喂入元件由橡胶制成,耐磨性好,增大了 与甘蔗间摩擦力的同时又避免损伤甘蔗。甘蔗直径 均值为 26.88 mm[22],以此为参考设计截面尺寸。V 形截面齿保证了甘蔗和的齿间的对中性,不同直径 的甘蔗都能经齿间 V 形口的夹持往后输送。当切断 的甘蔗与主动喂入辊接触时,喂入辊产生的切向力 会促使甘蔗加快向后输送,有利于物流通道的顺 畅。通过试验得到,当辅助喂入辊转速为 550 r/min 时输送效果最好。