西门子SimoDrive伺服驱动模块的维修
西门子伺服驱动器常见故障维护方法
西门子伺服驱动器常见故障维护方法
伺服驱动器是用于控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流电机,属于伺服系统的一部分,主要应用于高精度定位系统。
一般通过位置、速度和扭矩三种方式控制伺服电机,实现高精度传动系统定位,目前是传动技术的高精尖产品。
笔者总结多年检修维护经验,列举伺服驱动器常见故障及处理方法如下:
1、当示波器检测驱动器的电流监控输出端时,发现它全是噪声,无法读取。
故障原因:电流监视输出端与交流电源没有隔离(变压器)。
处理方法:可用直流电压表检测观察。
2、电机在一个方向上跑得比另一个方向快。
1)故障原因:无刷电机相位错误。
处理方法:检测或检测正确的相位。
2)故障原因:在不用于测试的情况下,测试/偏差开关到测试位置。
处理方法:将测试/偏差开关打入偏差位置。
3)故障原因:偏差电位器位置不正确。
处理方法:重新设定。
3、马达失速。
1)故障原因:速度反馈的极性错误。
处理方法:
a.如果可能,将位置反馈极性开关打到另一个位置。
(有些驱动器可以)
b.使用速度计时,将驱动器的TACH+和TACH-对调访问。
c.使用编码器时,将驱动器上的ENCA和ENCB对调访问。
d.在HALL速度模型下,将驱动器上的HALL-1与HALL-3对称,将Motor-A与Motor-B对称。
2)故障原因:编码速度反馈时,编码电源失电。
处理方法:检查连接5V编码器的电源。
确保该电源能够提供足够的电流。
使用外部电源时,确保该电压对驱动信号地。
西门子伺服电机抖动发热维护和修理 伺服电机维护和修理保养

西门子伺服电机抖动发热维护和修理伺服电机维护和修理保养西门子伺服电机抖动发热维护和修理,西门子伺服电机线圈烧维护和修理,西门子伺服电机无力维护和修理,西门子伺服电机西门子伺服电机网口坏维护和修理编码器接口坏维护和修理,西门子伺服电机网口撞坏维护和修理当天修好,西门子系统伺服电机网口坏维护和修理西门子伺服电机不转维护和修理,西门子伺服电机报编码器故障维护和修理,西门子伺服电机坏维护和修理,机床伺服电机故障,西门子伺服电机网口坏运行异响故障维护和修理,西门子伺服电机网口坏维护和修理,西门子主轴电机,异步电机,同步电机,数控电机,水冷电机,风冷电机网口坏,编码器接口坏维护和修理,西门子数控系统,加工中心,磨床,冲床,钻床,镗床,铣床,立式车床,卧床/电机网口坏,编码器接口坏维护和修理,西门子伺服电机十年维护和修理技术,配件齐全,全套测试平台,各种故障快速修复。
西门子伺服电机网口坏维护和修理,为什么选择我们:从业至今十一年维护和修理阅历,与国内外多家科研机构均有深度技术合作,自主研发多种高精密测试仪器,维护和修理过的西门子不少于150种,维护和修理过的西门子不同型号不少于8万种,保障修复率总体保持在95%以上,占具国内西门子同行业水平。
修好的设备客户收到后无需再调试,装机即可使用。
正常使用可达到和新设备一样的性能和使用年限。
现在维护和修理的西门子设备,不限任何型号,不限任何生产年份的机器。
只要是西门子机床的故障我们就可以维护和修理。
维护和修理所需更换的配件,均为原装进口。
西门子伺服电机网口坏维护和修理,编码器接口坏维护和修理,所以电动机产生的转矩为恒功率特性,充电电流减小至 0,通常,大孔隙的比例随总孔隙量的加添而加添.与总孔隙量的分析结果所示的情况相比,那些有启发性的引起孔隙形成因素将对焊接接头的牢靠性产生更大的影响,掌控孔隙形成的方法包括: 1,改进元件/衫底的可焊性; 2,接受具有较高助焊活性的焊剂; 3,削减焊料粉状氧化物;4,接受惰性加热气氛. 5,减缓软熔前的预热过程.与上述情况相比,在BGA 装配中孔隙的形成遵奉一个略有不同的模式(14).一般说来.在接受锡63 焊料块的BGA 装配中孔隙紧要是在板级装配阶段生成的.在预镀锡的印刷电路板上。
SIEMENS SIMODRIVE 611 伺服驱动系统故障诊断说明1
SIEMENS SIMODRIVE 611 伺服驱动系统故障诊断说明1★下列故障与警告的说明对于“SIMODRIVE 611 universal”的所有软件版本都有效。
001 驱动器没有操作系统原因:存储模块内没有驱动器操作系统排除:-通过SimoCom U加载器操作系统-插装带有驱动器操作系统的存储模块确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)002 计时溢出,:\%X原因:驱动处理器的时间计算不能再充分满足选用功能规定的循环时间。
补充信息:仅限于西门子系统内部错误的诊断。
排除:不使用如下大量费时的功能:-可变通讯功能(P1620)-追踪功能-以FFT方式启动或分析步进响应-速度前馈控制(P0203)-最小/最大存储(P1650.0)-DAC 输出(最多1个频道)增加循环时间:-电流控制器循环(P1000)-速度控制器循环(P1001)—位置控制器循环(P1009)-嵌入循环(P1010)确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)003 NMI预期监控,Suppl. info:\%X原因:控制模块上的监控计时器已经期满,其原因是控制模块在时间基准方面的硬件错误所导致。
补充信息:仅限于西门子系统内部错误的诊断。
排除:更换闭环控制模块。
确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)004 堆栈溢出。
:\%X原因:违反了内部处理器硬件堆栈的限制或数据存储在软件堆栈的限制,其原因很可能是控制模块的硬件错误所导致。
补充信息:仅限于西门子系统内部错误的诊断。
排除:—驱动模块断电后通电—更换控制模块。
确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)005 非法操作程序编码、非法扫描,SWI,NMI(DSP)。
:\%X原因:处理器在程序存储器中发现非法命令。
补充信息:仅限于西门子系统内部错误的诊断。
数控设备调试与维修6-实验五 SIMODRIVE 611U伺服驱动的配置
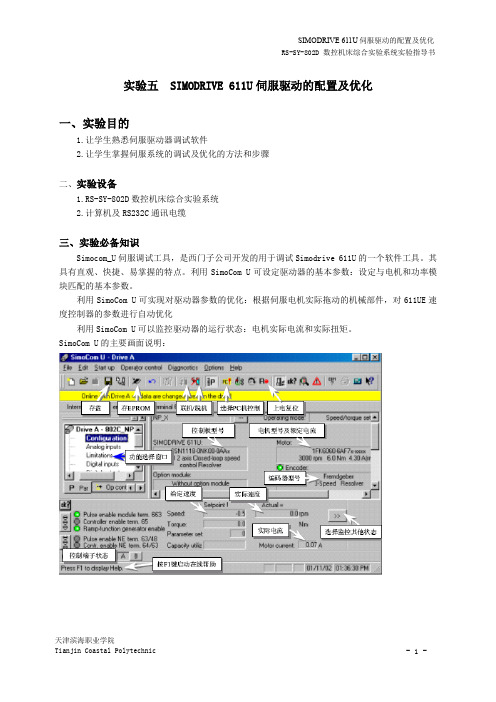
实验五 SIMODRIVE 611U伺服驱动的配置及优化一、实验目的1.让学生熟悉伺服驱动器调试软件2.让学生掌握伺服系统的调试及优化的方法和步骤二、实验设备1.RS-SY-802D数控机床综合实验系统2.计算机及RS232C通讯电缆三、实验必备知识Simocom_U伺服调试工具,是西门子公司开发的用于调试Simodrive 611U的一个软件工具。
其具有直观、快捷、易掌握的特点。
利用SimoCom U可设定驱动器的基本参数:设定与电机和功率模块匹配的基本参数。
利用SimoCom U可实现对驱动器参数的优化:根据伺服电机实际拖动的机械部件,对611UE速度控制器的参数进行自动优化利用SimoCom U可以监控驱动器的运行状态:电机实际电流和实际扭矩。
SimoCom U的主要画面说明:四、实验内容1.驱动器的调试2.驱动器的优化五、实验步骤1.驱动器的调试步骤一在断电的情况下(台式电脑要拔下电源插头!),用RS232电缆连接PC的COM口与611U 上的X471端口。
步骤二驱动器上电,在611UE的液晶窗口显示:“A1106”表示驱动器没有数据;R/F红灯亮;总线接口模块上的红灯亮步骤三从WINDOWS的“开始”中找到驱动器调试工具SimoCom U,并启动;步骤四选择连机方式步骤五进入连接画面后,自动进入参数设定画面:在软件的提示下进行参数的设定:1)定义驱动器的名称,通常可以用轴的名称来定义,如该驱动器用于X轴我们可以添入XK7124_X2)输入PROFIBUS总线地址:3)设定电机型号:4) 选择编码器,选择标准编码器( 2048 P sin/con信号,1Vpp) 如为其他编码器请选择Enter Data 并如实输入编码器数据。
5)选择运行模式6)直接测量系统的设定7)直接测量系统参数8)存储参数9)配置完成611UE的R/F红灯灭,液晶窗口显示“A0831”—表示总线数据通讯;总线接口模块上的红灯亮若PLC控制电源模块的端子48、63、64分别与端子9接通,电源模块的黄灯亮,表示电源模块已使能;坐标轴配置的不正确可导致驱动及电机出现故障,如数据未存储也会在伺服单元掉电后,在伺服驱动器上出现1106号报警。
SIEMENS 伺服驱动系统故障维修讲解

SIEMENS 伺服驱动系统故障维修讲解例1.故障现象:某配套SIEMENS PRIMOS系统、6RA26**系列直流伺服驱动系统的数控滚齿机,开机后发生“ERR21,Y轴测量系统错误”报警。
分析与处理过程:数控系统发生测量系统报警的原因一般有如下几种:1)数控装置的位置反馈信号接口电路不良。
2)数控装置与位置检测元器件的连接电缆不良。
3)位置测量系统本身不良。
由于本机床伺服驱动系统采用的是全闭环结构,检测系统使用的是HEIDENHAIN公司的光栅。
为了判定故障部位,维修时首先将数控装置输出的X、Y轴速度给定,将驱动使能以及X、Y轴的位置反馈进行了对调,使数控的X轴输出控制Y轴,Y轴输出控制X轴。
经对调后,操作数控系统,手动移动Y轴,机床X轴产生运动,且工作正常,证明数控装置的位置反馈信号接口电路无故障。
但操作数控系统,手动移动X轴,机床Y轴不运动,同时数控显示“ERR21,X轴测量系统错误”报警。
由此确认,报警是由位置测量系统不良引起的,与数控装置的接口电路无关。
检查测量系统电缆连接正确、可靠,排除了电缆连接的问题。
利用示波器检查位置测量系统的前置放大器EXE601/5-F的Ual和Ua2、*Ua1和Ua2输出波形,发现Ua1相无输出。
进一步检查光栅输出(前置放大器EXE601/5-F的输入)信号波形,发现Ie1无信号输入。
检查本机床光栅安装正确,确认故障是由于光栅不良引起的:更换光栅LS903后,机床恢复正常工作。
例2.故障现象:某配套SIEMENS PRIMOS系统、6RA26**系列直流伺服驱动系统的数控滚齿机,开机后发生“ERR21,X轴测量系统错误”报警。
分析与处理过程:故障分析过程同前例,但在本例中,利用示波器检查位置测量系统的前置放大器EXE601/5-F的Ual和Ua2、*Ual和*Ua2输出波形,发现同样Ual无输出。
进一步检查光栅输出(前置放大器EXE601/5-F的输入)信号波形,发现Ie1,信号输入正确,确认故障是由于前置放大器EXE601/5-F不良引起的。
SimoDrive611Ue伺服模块驱动的使用资料课件
1
Siemens伺服驱动简介
● Siemens SimoDrive 611伺服驱动器根据控制 信号的不同,包括模拟伺服611 A 、数字伺服 611D 和通用型伺服611U。
● 611 系列都属于模块化结构,由电源模块、控 制模块和功率模块等模块组成。
2
电源模块 功率模块 控制模块
3
611系列的三个模块
240V3AC±10% 220V3AC±10% 变压器 200 V3 AC±10%
DC 680 V DC 625 V DC 600 V
DC 490 V
6
驱动器的结构及工作原理
控制模块用于单或双轴功率模块 伺服坐标轴、伺服主轴或普通感应电 机主轴 主轴和进给轴可以在同一个控制模块 上 附加的 TTL 编码器用于主轴 可为外部主轴驱动器提供+/-10V 接口 利用现场总线进行运动控制 驱动器的调试借助于 SimoComU 非常 容易
A2
U2 V2 W2
M 3-
驱动器 A ( 电 机 1 )
M 3-
驱动器B (电机2)
电源馈入模块各使能接口说明
12t或超温报警信号
驱动就绪信号
接 PLC 输 入
5.3
5.2
5.1
外部24VDC 空
外部24VDC
74 73.2
73.1
72
伺服驱动器简易维修方法

伺服驱动器简易维修方法一、伺服驱动器无法正常启动1.检查电源:检查电源线是否接触良好,是否有电流输出。
如果没有电源输出,可以尝试更换电源或检修电源线路。
2.检查控制信号:检查控制信号线路是否连接正确,信号是否正常输入。
如果出现异常,可以检查控制器或相关传感器的工作状态,并进行相应的维修或更换。
3.检查输入电源电压:检查输入电源电压是否在伺服驱动器的额定范围内。
如果电压偏高或偏低,需要调整电源电压或更换电源。
4.检查保险丝和熔断器:检查伺服驱动器内部的保险丝和熔断器是否烧断,如有需要,更换相应的保险丝或熔断器。
二、伺服驱动器速度不稳定或无法控制1.检查反馈信号:检查反馈传感器的工作状态,确保其信号正常输出。
如果反馈信号异常,可以检查传感器本身或连接线路,并进行维修或更换。
2.检查电机:检查伺服驱动器驱动的电机是否损坏或老化,如有需要,可以更换电机。
3.检查控制器:检查控制器是否工作正常,如果控制器出现故障,可以尝试重新设置参数或更换控制器。
三、伺服驱动器过热保护1.检查散热器:检查伺服驱动器上的散热器是否堵塞或散热不良。
如果散热器堵塞,可以清理散热器上的灰尘或杂物;如果散热不良,可以增加散热器的散热面积或更换更高效的散热器。
2.检查工作环境:检查伺服驱动器的工作环境,确保通风良好,温度适宜。
如果工作环境温度过高,可以增加通风设备或进行空调降温。
四、其他常见故障及处理方法1.异常噪声:检查伺服驱动器安装是否牢固,接线是否正确,地线是否接好。
如果有故障部件,可以更换或维修。
2.无法保持位置:检查伺服驱动器的位置控制参数是否设置正确,如果参数设置不当,可以重新调整。
3.通信故障:检查通信线路是否连接正确,是否有干扰或断开。
如有干扰,可以检查线路是否靠近干扰源,如有断开,可以重新连接线路或更换通信线缆。
SIEMSIMODRIVE 611 伺服驱动系统故障诊断说明(2)
SIEMENS SIMODRIVE 611 伺服驱动系统故障诊断说明(160-505) 2012-02-04 13:21:56楼主160 基准轨迹未能实现原因:在开始寻基准点后,坐标轴在P0170运动过程中未能发现基准轨迹。
排除:—检查“基准轨迹”信号—检查P0170—如果坐标轴没有基准轨迹,则设置P0173至1确认:故障存储器重新置位。
反应:停止、STOP Ⅴ161 基准轨迹太短原因:当坐标轴向基准轨迹运动而且没有达到轨迹的停滞点时,错误被提示,i.e.基准轨迹太短。
排除:—设置P0163(寻基准点的速度)至较低值—增加P0104(最大制动值)—使用更长的基准轨迹确认:故障存储器重新置位。
反应:停止、STOP Ⅴ162 无零基准脉冲原因:当脱开基准轨迹后,坐标轴在P0171(基准轨迹与零脉冲之间的最大距离)运动过程中未能发现零脉冲。
排除:—检查带以零标记为基准的编码器—设置P0171至较高值确认:故障存储器重新置位。
反应:停止、STOP Ⅴ163 无编码运行和运行模式不匹配原因:无编码运行被参数化(P1006)并且“定位”或“位置基准值”运行模式设置。
排除:设置运行模式“速度/转矩设置”(P0700=1)确认:接通电源反应:停止、STOP Ⅴ165 绝对定位块不合理原因:带绝对定位数据的往复运动块在坐标轴连接运动时未被允许。
排除:修正往复运动块确认:故障存储器重新置位。
反应:停止、STOP Ⅳ166 连接不成功原因:在实际运行状态中,连接未能建立。
排除:—设置角度编码器界面(P0890,P0891)—检查连接结构(P0410)确认:故障存储器重新置位。
反应:停止、STOP Ⅵ167 启动连接信号原因:“启动连接”输入信号有效,输入信号对于启动连接是必要的。
排除:重置“启动连接”输入信号,确认故障,再设置输入信号并用开关接通连接。
确认:故障存储器重新置位。
反应:停止、STOP Ⅱ168 过流,缓冲存储原因:带有排队功能的连接发生,最大16个位置被保存在P0425∶16。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
近年来 西 门子公 司 Sinumerik数 控 系 统 在 制 造业 各种加 工设 备 中的应 用越 来 越 广泛 。SimoDrive61 1变 频系统 是 Sinumerik数控 系统 中最重 要 的组 成部 分 ,但 是 611系统对 使用 环境 的要求 相对较 高 ,电网质 量 、环 境温 湿度及 灰尘 等 因素都对 系统 的稳定运 行造 成很大 影 响 ,特别 是伺服 驱 动模 块 和 电源 模 块 的故 障率 比较 高 ,大功率 IGBT元件 很容 易损坏 。
· 126 ·
改装与维修 R ngand nfenance
C01~C06可 以减 小这 种过 高 的 电压增 长率 ;同时 ,IG— BT管 由截 止到导 通 的瞬 间 ,C01~C06所 充 的 电压 将 对 V1~V6放 电 ,此 放 电 电流 的初 值 很 大 ,R01~R06 可 以限制 C01~C06的瞬 间放 电 电流 ,防止 IGBT管损 坏 。
关键 词 :西 门子 数控 驱动模 块 IGBT 维修
Maintenance of Siem ens Sim oDrive Servo Drive Module WANG Anjun,WU Junning,LIU Wei
(Che ̄"Automobile Co.,Ltd.,Wuhu 241009,CHN)
Edition 03, Printed in Germany,2003.
第一作 者 :朱奎 阳 ,男,1984年 生 ,硕 士 生 ,主要研 究 方 向 为数 控 技 术 与 设 备 。
(编 辑 李 静 )
(收稿 日期 :2009—10—10)
文章编号 :10644 如果您想发表对本文的看法.请将文章编号填入读者意见调查表中的相应位置。
1 驱 动 模 块 的 基 本 电路 结 构
驱动模 块 的结 构 较 为 简单 ,分 为 控 制模 块 和 功率
模 块 两部分 ,控制 模块 接 收 CPU 的控 制指 令及 外部反 馈 信号 ,产生 PWM 波 ,实 际 应 用 中故 障率 很 低 ,在此 不 做介 绍 。功率模块 接 收 PWM 波 经 门极 驱 动 电路放 大后 触发 IGBT元件 ,将 600 V直 流 电逆变生成 三相交 流 电驱 动伺 服 电动机 。功 率模 块 的故 障率 较 高 ,驱 动 模 块故 障 的 90% 均为功 率模块 故 障 ,驱动 模 块 的维修 重 点就是 功率模 块 的维修 。图 1为驱动模 块 的电路示 意图 。
Italy, 2005.
[2] Bosch Rexroth AG,Rexroth IndraMotion MTX Programming Manual 『M].R911316992,Edition 01.Printed in Germany,2005.
[3]Bosch Rexroth AG,Rexroth IndraDrive Drive System ,R91 1309636 ,
笔者公 司 目前 拥 有 西 门子 各 类 数控 系统 近百 台 、 套 ,因此对伺 服 电源模 块 和 驱 动模 块 的 维修 就 显 得特 别重要 。本 文结合 自身 的维 修 经 验 ,主要 介 绍 西 门子 6SN1 123驱动模 块 的一般 维修方 法 。因为 6SN1 145电 源模块 与驱 动模块 的 电路结 构 基 本 相 同 ,电源 模 块实 现整 流 ,驱 动模 块 实 现逆 变 ,其 大 功率 IGBT及其 驱 动 电路完 全一 样 ,因此具 有 同样 的借 鉴意 义 。
友好 开放 的应用界 面 ,我 们 才 在较 短 的工 期 内解 决 了 众多 的问题 ,成功 的对 该磨 床 进 行 了改造 。该 磨 床 改 造后使 用 4个月来 工作 稳定 ,产 品合 格率 达到要 求 。
参 考 文 献
[1]Marposs S.P.A.Installation Manual[M].D291 MOOOUB,Printed in
由图 1可知 ,C1、C2和 R1、R2组 成 滤 波 电路 ;V1 ~ V6六只 IGBT管组 成 了三相 桥 式 逆 变 电路 ,它 是驱 动模块 的核 心 电路 之一 ,有 规 律 地控 制 IGBT的 导通 与关 断 ,就可 以得 到任意频 率 的三相交 流输 出。
IGBT管在 导通 和关 断的瞬 间 ,其 电压 和 电流 的变 化 率非 常大 ,可能使 IGBT管 受 到损 害 ,因此 ,每 个 IG— BT管 旁边接 人 由 C01~C06和 R01~R06组 成 的保 护 电路 。IGBT管每次 由导通 到截 止的 瞬间 ,集 电极和 发 射极 间的 电压将迅 速 由 0 V上 升为直 流母线 电压 Ud,
A bstract:This article describes basic structure and common faults repair m ethod of Siemens Sim oDrive6 1 1 drive module, and has some referential significances to the users who want to carry out the maintenance of Si— emens servo drive module and power module by themselves.
改装与维修 ngandMainfe栅ce
西 门子 Si moDrive伺 服驱 动模 块 的维修
王安军 吴俊 宁 刘伟
(奇 瑞汽 车股份 有 限公 司 ,安 徽 芜 湖 241009)
摘 要 :以西 门子 SimoDrive611系列的驱 动模块 为例 ,阐 述 了其基 本 结构 、常见 故 障的维 修 方法 ,对 用户 自 主开展 西 门子伺服 驱动模 块及 电源模 块的 维修具 有一定借 鉴 意义 。