基于线性ccd的自主行驶小车系统的设计 大学本科学位论文
基于线性CCD循迹的智能车系统设计
2
心距变化 率+ KA× 二 _, 其 中v为小车当前速度,
尺
参考文献
[ 1 】 邹淑彩 . 刷卡 式无人车在物料搬运 系统 中
的应用 … .航 空精密制造技术 , 2 0 1 4 . [ 2 ]郭佳 ,刘晓玉 ,昊冰 ,付 晓薇 .一种光 照
KI = 0 . 0 9 5 。 占空 比在 2 O % 的 情 况 下 , 智 能 车 能 以 2米 / 秒 的速 度 完 成 赛 道 。
移量转换成脉冲 或数 字量进 行输出,编码器 每 确的将 1 2 8个线性点 中间部分存在障碍物 的部
当赛道左 右边沿都 出现在线性 CC D采集 的图像中 ,即智能车行驶在直道上 ,直接通过 计算得到左右边沿 中间点作为赛道 中心线 。当 赛道左边 沿或右边 沿未能 出现在线性 CC D采 集的图像 中,即智能车处于弯道上 ,使用设置 好的赛道值分别对左、右边沿做加 、减运算得 到赛道中心线。当赛道左边沿和右边沿都未能
死。 确 定 要 给 的 转 角 公 式 为 G i v i n g a n g l e
=
减 速依赖于速度 闭环返 回的速度脉冲值的可靠 在 的少 数高电平置换成为低 电平,保证智能车 度和精确 度,因此为 了提高检测精 度选用精度 准确地扫 描到正确的图像。之后找出灰度值与
较 高的欧姆龙 5 0 0线光 电编码器。编码器安装
面 ,采用 s i m u l i n k 建模 ,这样 的仿真模 型可以
找到 P I D参数 K P、 K I 、 KD 的变 化 ,避 免 了 “ 黑
箱 ”调试参数的弊端 ,方便地 实现 、验证 和改 舵机控制采用 P D控制 ,增加 响应的快速 性及稳定 性,舵机 P WM 输 出占空 比= KP x偏 心距 + K Dx偏心距变化率 。通过对智能车系统 进行建模 ,将向心加速度的影响分量加入 ,最
基于线性CCD的智能小车控制系统设计

度 ;电路 板检测 并根 据 电位器判 断舵 机转 动角度 ,然 后控 制
舵机 转动到 目标角度或 保持在 目标角度 。 l - 4 速度测 量模块 。采 用欧姆 龙 编码器 ,其输 出轴 的齿
轮 同小车 的 电机齿 轮连在 一起 ,也就是 编码 器 的转速 同小 车
环境下较快 地行驶 。
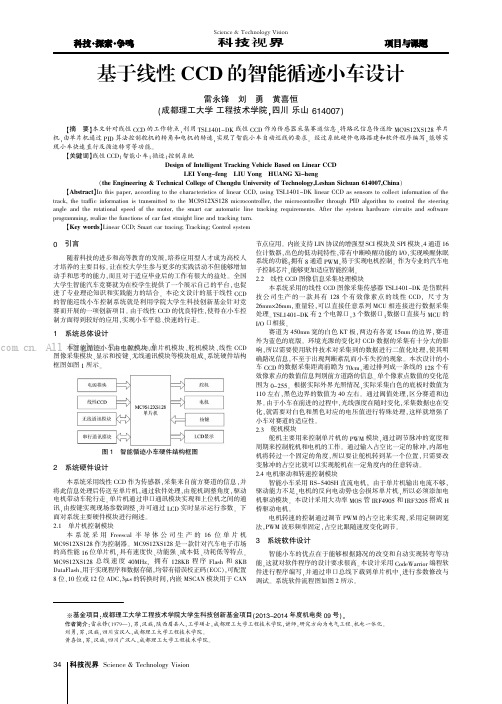
1 . 5 电机驱动模 块 。采 用 MO S 管 双 电机 驱动 ,增 加总线 驱 动芯 片 7 4 L V C 2 4 5 ,提 高信号 驱动 能力 ,同时隔离 MO S 管 和 单 片机 ,保 护 单 片机 芯 片 ,防止 M O S 损 坏 后将 电池 电 压 直 接输入 到单 片机 ,进 而烧 坏单 片机 控制 引脚 。通 过单 片 机 输 出 的 四组 P WM控制 信 号 ,便 可 实现 对直 流 电动 机 的正 反
S YS P R A CTI CE
◆唐
摘 要 :系 ̄ v X MC9 S 1 2 XS 1 2 8 单 片机 为控 制核 心 ,通过 线性 CC D采集路 面信 息。利 用 固定 阈值 的 思想 以及 跟踪 引线的 黑线边缘提 取 法处理 图像 ,结合 非线性 的位置 式P D算 法、增量 式的P I D算法 实现 对方 向和速度 的控制 。经 实验验证 ,该 系统能够排 除干扰信 息 ,稳 定地 沿着黑 色引导线行驶 。 关 键词 :线 }  ̄ C C D;智能 车 ;单 片机 ;P I D 算 法
速 地行驶 ,成为软件 系统设 计的关键 。
{ I
『
n
单片机
U
电机驱动
n
f 舵机驱动
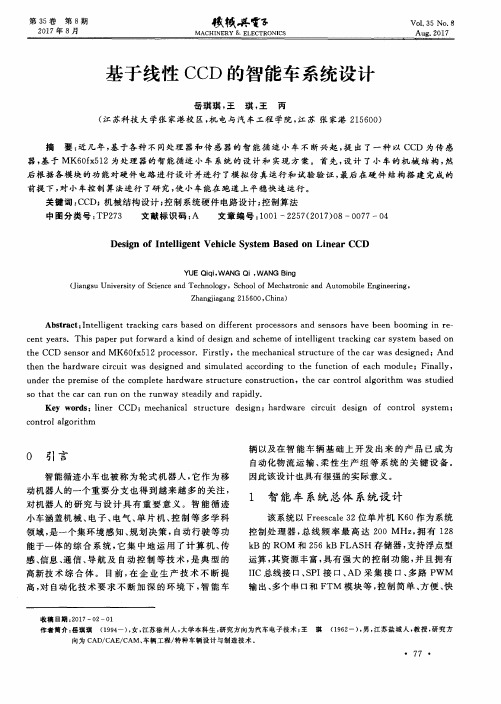
图1 硬 件 系 统 组 成
基于线性CCD的智能循迹小车设计
节点应用遥 内嵌支持 LIN 协议的增强型 SCI 模块及 SPI 模块袁4 通道 16 位计数器袁出色的低功耗特性袁带有中断唤醒功能的 I/O袁实现唤醒休眠 系统的功能曰拥有 8 通道 PWM袁易于实现电机控制遥 作为专业的汽车电 子控制芯片袁能够更加适应智能控制遥 2.2 线性 CCD 图像信息采集处理模块
咱责任编辑院庞修平暂
渊上接第 40 页冤表示所属袁如院廿剽劐卦 蒯匮蒯仨 剽匮劂劂剀匮刭仨赜匮刂劁.爸爸的朋友在 讲遥 第三格旧译予格袁基本用法是表示间接客体袁如院亓 剽匮劂劂剀匮刭仨赜匮刂仞 蒯匮蒯刂 赜劂刈. 我给爸爸讲述着所有的事遥 第四格旧译补格袁基本用法是直 接客体袁如院亓 剌仞匾剌仞 蒯匮蒯劐. 我爱爸爸遥 第五格旧译造格尧工具格袁基本 用法是表示工具尧方法袁也表被动句的行为主体遥 如院噩剡刳卦匮 亻刳劁匮刂劁劂伛 蒯匮蒯剜刿. 此书正被爸爸读着遥 第六格袁旧译前置格袁与 剜 等前置词连用袁 表言语思维的内容等义袁 如院亓 剽匮劂劂剀匮刭仨赜匮仞 匾剽匮劁劐 剜 蒯匮蒯刂. 我给弟弟 讲爸爸遥
SKP=1000;
KI=120;
KD=250;
}
else
//减速 PID 参数
{
SKP=800;
KI=100;
KD=200;
}
car_speed =25000+SKP*ek0+KI* (ek0-ek1) + KD * (ek0-2*ek1+
ek2);
if(car_speed > 25000)
car_speed=25000;
舵机主要用来控制单片机的 PWM 模块袁通过调节脉冲的宽度和 周期来控制舵机和电机的工作遥 通过输入占空比一定的脉冲袁内部电 机将转过一个固定的角度袁所以要让舵机转到某一个位置袁只需要改 变脉冲的占空比就可以实现舵机在一定角度内的任意转动遥 2.4 电机驱动和转速控制模块
基于线性CCD的智能车系统设计
中图分 类号 : TP 2 7 3 文献 标识码 : A 文章 编号 : 1 0 0 1 —2 2 5 7 ( 2 0 1 7 ) 0 8 —0 0 7 7 —0 4
De s i gn o f I n t e l l i g e nt Ve hi c l e S y s t e m Ba s e d o n Li ne a r CCD
后根 据各模 块 的功能 对硬件 电路进 行设 计并进 行 了模拟 仿 真 运行 和 试验 验证 , 最后 在硬 件 结 构搭 建 完成 的 前提 下 , 对 小 车控 制 算法进行 了研 究 , 使 小车能在跑 道上 平稳 快速 运行 。 关 键词 : C C D; 机 械结 构设计 ; 控制 系统 硬件 电路设 计 ; 控 制算 法
c e n t y e a r s . Th i s p a p e r p u t f o r wa r d a k i n d o f d e s i g n a n d s c h e me o f i n t e l l i g e n t t r a c k i n g c a r s y s t e m b a s e d o n t h e C CD s e n s o r a n d M K6 0 f x 5 1 2 p r o c e s s o r .Fi r s t l y ,t h e me c h a n i c a l s t r u c t u r e o f t h e c a r wa s d e s i g n e d ;An d
基于CCD的自动循迹小车的软件设计
国家自然科学基金资助项目(编号:60801056);上海教委科研创新重点基金资助项目(编号:11ZZ170);上海市青年科技启明星计划基金资助项目(编号:11QA1402800)。
修改稿收到日期:2011-01-17。
第一作者杨宁(1976-),男,2006年毕业于上海交通大学精密仪器及机械专业,获博士学位,副教授;主要从事运动物体定位、状态检测与信息融合方面的研究。
基于CCD 的自动循迹小车的软件设计Software Design of the Auto Tracking Car Based on CCD杨宁1石冰飞2朱平1周宏辉3(上海电力学院电力与自动化工程学院1,上海200090;国核自仪系统工程有限公司2,上海200233;宁波市电业局3,浙江宁波315010)摘要:为实现小车的自动循迹功能,分别采用飞思卡尔16位单片机MC9S12XS128以及CMOS 面阵图像传感器HQ7620模块作为主控制器和导向传感器,并结合一定的处理算法进行路径信息识别。
单片机对摄像头采集到的路径图像信息进行存储、滤波、道路识别和最优路线计算后,发出控制信号以驱动小车的舵机和电机。
在控制策略方面主要采用变参数、带死区的增量式数字PID 控制器,使小车在行驶时的整体速度得以提高,系统性能更加稳定,灵敏度和鲁棒性也得到一定的改善。
关键词:CCD图像处理路径识别PID单片机中图分类号:TP391文献标志码:AAbstract :To realize the auto tracking function for the car ,Freescale 16-bit single chip computer MC9S12XS128is adopted as the main controller and CMOS camera HQ7620is used as the guiding sensor ,and appropriate processing algorithm is combined for path information recognition.The image information of the path collected by the camera are stored ,filtered ,identified ,and calculated for optimal route by the single chip computer ,then the control signals are issued to drive the motor and steering engine.The control strategy mainly adopts the incremental digital PID controller with variable parameter and dead band to enhance the speed of car ,and improve the stability ,sensitivity ,and robustness of the system.Keywords :Charge coupled device (CCD )Image processingPath recognitionProportional integral differential (PID )Microcontroller0引言自动循迹小车作为一种移动机器人,主要应用于机场、仓库以及其他需要搬运设备的工况中。
基于线性CCD追逐智能车系统的硬件设计
1 引言智能循迹小车涵盖机械、电子、电气、单片机、控制等多学科领域,是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统,是高新技术的综合体。
目前,企业生产技术不断提高,对自动化技术要求不断提高,智能车以及在智能车基础上开发出来的产品成为自动化物流运输设备的关键,因此智能车的设计具有很强的实际意义。
本文以“恩智浦”杯智能车竞赛为背景,重点介绍线性CCD 追逐智能车系统的机械结构和硬件设计,结合相应的程序算法,经过不断改进、调试与优化,追逐智能车的行驶速度和稳定性得到明显的提高。
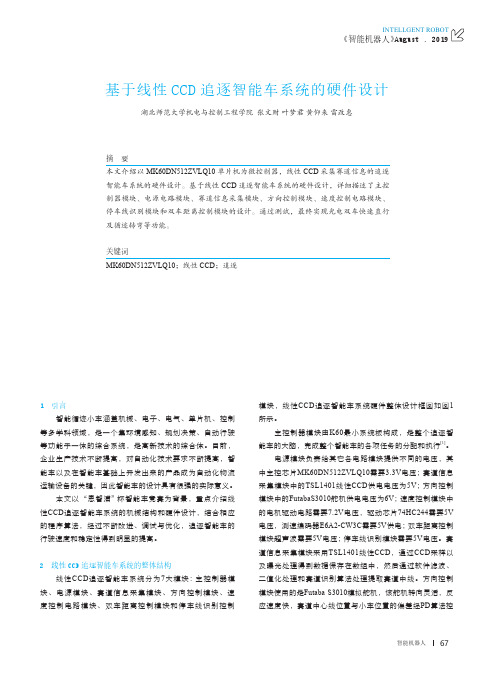
2 线性CCD 追逐智能车系统的整体结构线性CCD 追逐智能车系统分为7大模块:主控制器模块、电源模块、赛道信息采集模块、方向控制模块、速度控制电路模块、双车距离控制模块和停车线识别控制基于线性CCD 追逐智能车系统的硬件设计湖北师范大学机电与控制工程学院 张文财 叶梦君 黄仰来 雷改惠摘 要本文介绍以MK60DN512ZVLQ10单片机为微控制器,线性CCD 采集赛道信息的追逐智能车系统的硬件设计。
基于线性CCD 追逐智能车系统的硬件设计,详细描述了主控制器模块、电源电路模块、赛道信息采集模块、方向控制模块、速度控制电路模块、停车线识别模块和双车距离控制模块的设计。
通过测试,最终实现光电双车快速直行及循迹转弯等功能。
关键词MK60DN512ZVLQ10;线性CCD ;追逐模块,线性CCD 追逐智能车系统硬件整体设计框图如图1所示。
主控制器模块由K60最小系统板构成,是整个追逐智能车的大脑,完成整个智能车的各项任务的分配和执行[1]。
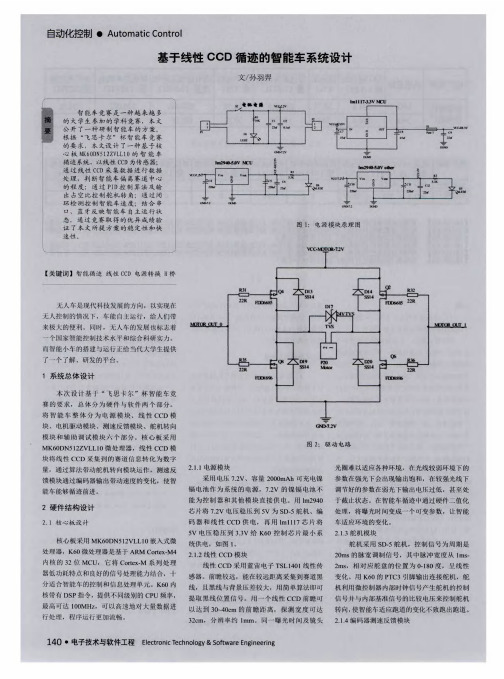
电源模块负责给其它各电路模块提供不同的电压,其中主控芯片MK60DN512ZVLQ10需要3.3V 电压;赛道信息采集模块中的TSL1401线性CCD 供电电压为5V ;方向控制模块中的FutabaS3010舵机供电电压为6V ;速度控制模块中的电机驱动电路需要7.2V 电压,驱动芯片74HC244需要5V 电压,测速编码器E6A2-CW3C 需要5V 供电;双车距离控制模块超声波需要5V 电压;停车线识别模块需要5V 电压。
本科毕业设计论文--基于plc行车控制设计
1前言1.1选题的必要性随着当今工业的发展,我们越来越依赖于流水线作业。
对于像我国这样的“世界工厂”而言那就更应该实现生产的流水线自动化作业。
在我国工业生产中,轻工业的流水线作业地发展是非常迅速的。
但对于重工业而言,却不是如此。
要实现重工业的流水线作业,首先要解决的一个问题,便是工件在生产过程中拖动问题。
对与轻工业而言,我们可以用传送带来完成。
但对于重工业而言,用传送带传送工件,则不太实用。
首先找重工业中所加工的产品,都是一些大型的工件,所以传送带的拖动力达到。
其次,传送带传送大型工件,需要占据较大的地面操作空间。
最后,大型工件在地面移动过程中,对生产工人的安全,也构成了一定的威胁。
鉴于此,我们在生产车间中,广泛采用行车起吊装置,即节省了地面操作空间,有提高了安全性。
但是,我们现在的许多起吊行车都是有人工控制。
这仍然达不到自动化生产的要求。
所以,本课题的研究着重于解决这一个问题,并将对现有行车的改造作为重点。
以求向自动化的生产迈进一步。
从而提高生产率、提高生产效益、改善生产环镜等。
1.2选题的依据本课题的选择来源于生产。
我之所以选择本课题的原因有四点:第一点,我曾于2009年暑假期间,在自贡川润股份有限责任公司实习过起重工这个职业。
所以我对起重行车的一些控制过程比较熟悉,同时发现现在人工控制的行车也确实存在着许多缺陷,特别是越来越不能满足当今自动化生产作业的要求。
第二点是,我对于自己本专业的学习。
其中很重要的一门专业课便是《电气控制与PLC的应用》,它为我在控制系统的选择与设计方面奠定了坚实的基础。
在诸多的专业课程中还有《电子电工基础》、《传感器原理及应用》、《维修电工实训》《CAD制图》等课程,都为我在线路设计、控制柜设计、行程开关的选择以及图纸的制作上奠定里基础。
第三点,是有王赛老师的鼎力支持。
对我所欠缺的许多东西(思维方式、论文格式等),他都给予了极大的支持。
第四点,学院图书馆的藏书,它为我的设计提供了极大的资料查阅支持。
基于线性CCD传感器检测的智能车控制系统
前言随着现代社会的高速发展,无论在生活应用还是在工业应用中,智能化的概念越来越多的出现在我们的身边。
尤其是自上世纪80年代以来,汽车技术以突飞猛进的速度在发展,汽车从原来的纯机械结构构成的代步工具逐渐演变成一个集各种高科技技术为一体的智能化的新时代产物。
因此,智能车的概念也就越来越凸显出来,智能汽车,顾名思义,就是在现代网络技术支撑下,利用电子信息通信技术,智能微控制器,环境监测控制技术,GPS导航技术等等组成的一个新意义的高新技术复合载体。
它能够实现自动的环境监测,规划处理,自动行驶还有人工辅助驾驶等功能。
现在汽车行业对智能汽车的研究主要在提高汽车的安全性和汽车的驾驶辅助上,在汽车自动驾驶方面的发展还没有质的飞跃,近年对于车辆自动驾驶,智能导航的研发正大力进行。
智能车辆的研究成果现在已经体现着一个研究团体乃至整个国家科研实力水平。
所以无论是中国还是国外很多国家已经把智能汽车确定为重点发展的项目。
21 智能车控制系统概况1.1 系统开发背景智能化,是现今社会前进的一个目标。
对于汽车来说智能化也会是未来发展的方向。
对于国家来说,大学生质量的好坏是这个国家的发展动力的重要指标之一。
大力发展国内大学生的科技实践能力一直是我国的一大政策。
其中为促进大学生的科研创新能力,一直在举办着各种各样的科技竞赛。
智能汽车方面,在中国的各种智能车机械车等的竞赛有很多,其中飞思卡尔杯全国大学生智能汽车竞赛在中国已经举办了九届。
这项赛事主要探索的就是智能汽车,用智能汽车模型作为研究对象,让学生们充分发挥学校中所学习科学文化知识,对智能小车加以设计并改装,完成一个能自动识别比赛赛道路况并能够进行判断并进行相应控制的小车。
最终完成大赛的比赛要求。
这项大赛其中包括了智能控制、环境监测、传感器技术等主要学科知识,还涉及到电子、电气、计算机、机械等多个基础学科。
赛事用比赛的方式,大大提高了大学生参与者的积极性,锻炼了大学生的实际操作能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本文主要设计制作一辆基于线性CCD自主循迹行驶的智能车,采用飞思卡尔半导体公司生产的32位单片机MK60DN512VLQ10作为核心处理器,主要通过TSL1401线性CCD采集赛道的一维图像信息,反馈给单片机控制舵机转向,电机调速,使小车按照事先架设好的跑道自主行驶,并且能通过ST188红外对管识别出终点(跟边线垂直的黑线段)自动停车。
硬件系统由单片机模块,TSL1401线性CCD模块、电源管理模块、电机驱动模块、OLED人机交互模块、光电对管模块以及电机、舵机和编码器组成。
软件系统主要由IAR进行开发,控制算法主要采用PID控制。
关键词智能车;线性CCD;PIDAbstractThis paper mainly introduces the design about a smart car with automatic tracking function based on linear CCD.The control system uses the Freescale Semiconductor's 32-bit microcontroller MK60DN512VLQ10 as the core processor.The TSL1401 linear CCD acquires one-dimensional image information, which is feedbacked to The MCU.Then the MCU controls servo’s direction, motor’s speed, so the car can automatically drive in accordance with beforehand track,identify the end(the black line vertical with sideline) and stop automatically by the ST188. The hardware system includes a microcontroller module,a TSL1401 linear CCD module,a power management module, a motor drive module, two OLED modules, four photoelectric tube modules,a motor, a servo and a encoder. The software system is developed by IAR and the control algorithm mainly uses PID control.Key wordsSmart Car; Liner CCD; PID1.引言汽车行业的发展已经超过了100多年,自1980年以来,智能理论控制技术在交通运输工程中已经被越来越广泛的运用,智能汽车的概念在这一背景下也就相应产生和发展[1]。
随着科学技术与现代汽车工业的结合发展,两者的产物“智能汽车”能像机器人一样,可以自动地进行环境的感知,规划和决策的运行控制[2]。
智能车系统是一个综合多技术领域系统,其包含了自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多个学科专业[3]。
因此,对智能车技术的研究能够促进计算机技术、车辆控制理论、摄像头[4]等多传感器信息融合技术等技术的快速发展;可以提高车辆的控制能力和辅助驾驶水平,对优化交通设施,缓解和改善交通问题具有积极的意义;改善工业人员工作环境,提高安全系数,同时还可以提高工业的智能化水平,提高产量。
为人类的生产生活带来越来越多的便利,使人类的生活质量越来越高。
智能车最大的要求就是能够自动循迹,像全国“飞思卡尔”杯智能车比赛、瑞萨杯智能车比赛等比赛都是要求智能车能够自动循迹。
而光电传感器的选用在自动循迹智能车系统中更是一个关键的问题。
传统的红外对管,激光管在前瞻和稳定性方面都存在一定的缺陷[5],线性CCD是新兴的光电传感器,第八届全国飞思卡尔杯智能车比赛中就对TSL1401线性CCD传感器进行了第一次使用,与传统的红外对管,激光等光电传感器相比,线性CCD具有很多优点,尤其是在线性度和图像均匀性等方面,采集到的数据便于单片机处理。
实验表明,线性CCD的前瞻比较远,能达到1.2米左右。
随着对智能车辆速度增加的要求,需要跟踪处理越来越多路况,如路口,避障等。
对于以上的情况,线性CCD能够利用其本身的特点有效的予以解决,尤其是在对于智能车辆的提速问题上。
随着线性CCD技术的不断提高与发展,线性程度自然会持续提高,提取的图像信息会变得更加的稳定有效,前瞻会变得更宽更远,因此必定会加快推进智能车速度提高的进步[6]。
本智能车系统就是基于线性CCD为基础而设计的。
2. 设计方案思路2.1 单片机的选择方案一:采用传统的8位40引脚单片机STC89C52作为主控芯片,该MCU是台湾宏晶公司的产品,具有低功耗,高性能,编程简单等特点,应用在很多领域。
方案二:使用飞思卡尔半导体公司的32位144引脚单片机MK60DN512VLQ10作为主控芯片,该MCU外设资源多,运算速度快,精度高。
考虑到本次智能车系统设计有一定的复杂性,要求主控芯片带有AD,PWM,正交解码等功能,并且要用到的引脚数目比较多,因此本次设计选用了K60作为主控芯片。
2.2 电机驱动的选择方案一:使用2片BTN7971半桥芯片搭成一个全桥驱动电机,电路搭建简单,理论驱动电流达到50A,但是芯片容易发烫。
方案二:用4个MOS管LR7843构成H桥和一个MOS驱动芯片IRF2184驱动电机运转,虽然电路组建有点复杂,但是理论驱动电流能达到160A并且电路稳定不会发烫。
方案三:采用LN298电机驱动模块,电路简单,但是驱动电流只能达到2A,达不到理想驱动效果。
考虑到系统电路的稳定性,本次设计选用了方案二。
2.3 显示模块的选择方案一:使用常用的LCD1602作为液晶显示器,显示字母和数字比较方便,控制简单,成本低,整屏能显示16*2个字符,与单片机并口连接,接线引脚多。
方案二:使用LCD12864作为液晶显示器,自带中文字库,分辨率为128*64,与单片机并口连接,但是价格昂贵。
方案三:采用0.96寸OLED12864显示器,采用4线同步串行SPI接线方式,接线简单,高分辨率,为128*64,显示效果远远超过LCD[7]。
考虑到成本,电路接线,显示效果等因素,本次设计选用了方案三。
3.总体设计3.1系统设计要求本课题要求设计制作一套基于线性CCD的自主行驶小车系统。
本系统场地是在一个白色地面上用黑色绝缘胶带布置两根边线,两根边线内是小车要行驶的道路,小车能通过线性CCD识别出该道路,并能自主沿着道路前进,到达终点时会自动停止,终点为跟边线垂直的黑线段(黑色绝缘胶带)。
在道路中间含十字路口,要求能识别出该十字路口,并正确通过该十字路口。
3.2系统总体设计方案本系统的最小控制核心MCU为MK60DN512VLQ10;线性CCD用支架固定在小车中心离地30cm处,前瞻60cm(能准确提取边线且不失真),使用4个MOS管搭成H桥作为电机驱动模块[8],大大增加电机驱动能力;光电传感器模块由四个ST188光电对管构成,在车身底部“一”字排开,用以检测终点。
电源模块采用飞思卡尔的7.2V电池给电机供电,同时经TPS7350芯片输出5V稳压给CCD模块、编码器供电;经TL1963芯片输出6V稳压给舵机供电;经TPS7333芯片输出3.3V稳压给单片机、OLED模块供电。
TSL1401线性CCD采回的图像数据传递给单片机处理,单片机利用PID算法控制舵机转变方向,调节电机速度,从而完成小车智能循迹[9]。
系统由K60为最小控制核心模块、TSL1401线性CCD模块、电源管理模块、电机驱动模块、OLED12864液晶人机交互模块、ST188光电对管模块以及电机、舵机和编码器组成。
系统框图如图3-1所示。
图3-1系统框图系统各个模块功能设计如下:1、通过TSL1401线性CCD获取道路的一维图像信息(128个像素点的电压),然后给单片机进行数据处理;2、采用MK60DN512VLQ10单片机为主控芯片对外围电路进行实时控制;3、光电对管用以检测起跑线,到达终点后,控制停车;4、伺服舵机带动小车两前轮控制小车转向;5、电机驱动电路驱动直流电机带动小车两后轮运转;6、采用两片OLED12864显示屏,一片显示CCD采回的图像波形,另一片结合五向按键做人机交互界面,调节PID参数,节省多次下载程序的时间,大大提高调车效率;7、采用500线欧姆龙编码器反馈电机转速,精确控制小车速度,有效提高系统的稳定性。
4.硬件设计4.1飞思卡尔32位单片机MK60DN512VLQ10介绍及其最小系统本设计使用的MCU是飞思卡尔半导体公司生产的32位MK60DN512VLQ10单片机,是飞思卡尔公司推荐的K60系列的32位增强型单片机。
该芯片以飞思卡尔最新的闪存技术,并且具有功耗低,性能高,精度高等特点,特别是多路快速的16位模数转换(ADC)、数模转换(DAC)和可编程增益运放(PGA)等功能强大、高效率的信号转换,调节和控制模块。
K60还具有以太网,全功能USB、硬件加密和篡改检测功能,具有丰富的模拟通信,定时和控制外设,还包括单精度浮点型运算单元,NAND闪存控制器和DRAM控制器[10]。
本设计的MK60DN512VLQ10单片机的最小系统如图4-1所示。
图4-1 K60单片机最小系统4.2电源模块的设计本智能小车采用飞思卡尔公司的7.2V电池给RS540直流电机供电,除此之外,系统还需要6V、5V、3.3V、12V给系统其他模块供电。
4.2.16V稳压电源设计由于舵机需要用到6V电源给其供电,本次设计选用了德州仪器生产的TL1963A 电源管理芯片,可调输出电压范围为1.21V~20V,输出电流能达1.5A,驱动舵机的效果比较明显,其电路原理图如图4-2所示。
图4-2 6V 稳压电源原理图通过查询芯片的Datasheet 可知,TL1963A 的输出电压计算公式为⎪⎭⎫ ⎝⎛+=12121.1R R V V out ,因此电阻R1配1K ,R2配3.9K ,经计算V OUT =1.21*(1+3.9/1)=5.929V ≈6V 。
4.2.2 5V 稳压电源设计为了提高电池的使用时间,通常需要调节压差(输入输出电压差小),使用功耗小(静态电流小),还有就是能够有欠压信号使单片机复位,德州仪器生产的TPS73XX 系列就符合这一功能的低压差稳压器。