PELCO-D控制协议
PELCO-D控制协议
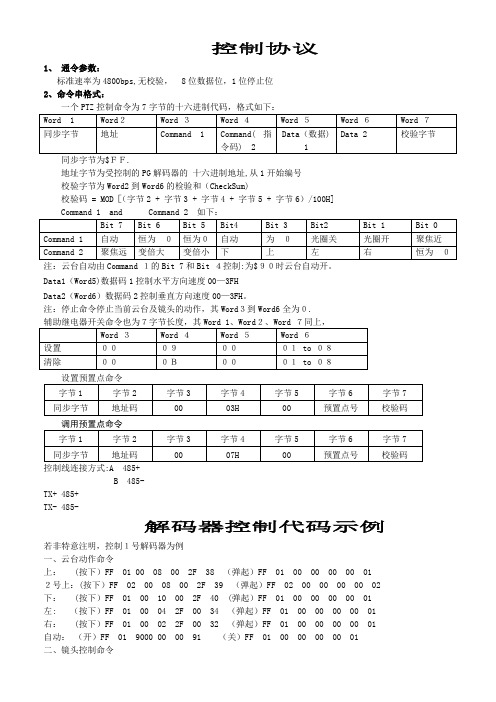
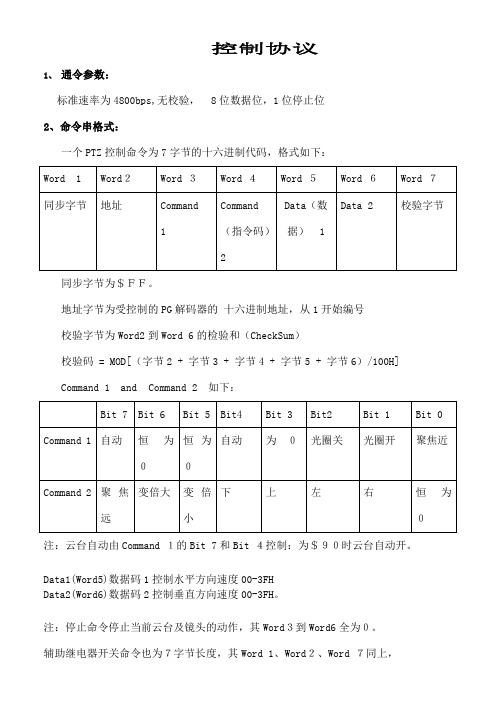
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF.地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]Command 1 and Command 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00—3FHData2(Word6)数据码2控制垂直方向速度00—3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0.B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上: (按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下: (按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左: (按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右: (按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 9000 00 00 91 (关)FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01 三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0BAU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令.2、要求软件可设置镜头及辅助继电器控制按钮的标题.3、辅助继电器的控制有两种方式,要求软件可由用户选择控制方式:按钮式:按钮按下时发出继电器闭合控制命令,反之弹起时发出继电器断开控制命令.开关式:按一下按钮发出继电器闭合控制命令,再按一下则发出断开命令。
pelco_d_protocol

PELCO产品协议解析
PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,
当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它
设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
诶
诺基数码科技有限公司的视频解码软件可完全兼容PELCO协议,可通过PC机控制PELCO的各种设备。
本文为你详细解析PELCO常用协议之一:PELCO-D协议
PELCO-D协议
PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:
Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCOD控制协议
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H] Command 1 and C ommand 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 012号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO-D与PELCO-P协议介绍
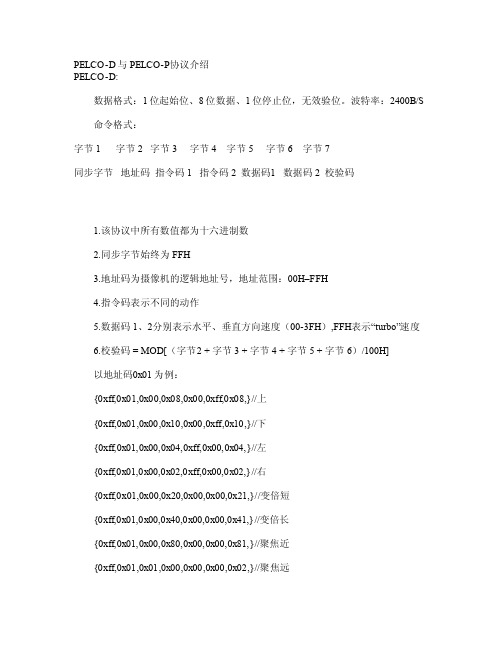
PELCO-D与PEL CO-P协议介绍P ELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7 同步字节地址码指令码1 指令码2数据码1数据码2 校验码 1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FF H 4.指令码表示不同的动作 5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“tur bo”速度6.校验码= MOD[(字节2 + 字节3 + 字节4 +字节5 +字节6)/100H] 以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0x ff,0x01,0x00,0x02,0x ff,0x00,0x02,}//右{0xf f,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0x ff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xf f,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0x ff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xf f,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0x ff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELC O-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验,8位数据位,1位停止位2、命令串格式:同步字节为。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(Checksum校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H]Comma nd 1 and Comma nd 2 女口下:注:云台自动由的和控制:为时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。
控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例、镜头控制命令 光圈:开(按下)FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下) FF 01 04 00 00 00 05(弹起) FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21(弹起) FF 01 00 00 00 00 01 大(按下) FF 01 00 40 00 00 41(弹起) FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02(弹起) FF 01 00 00 00 00 01 远(按下) FF 01 00 80 00 00 81(弹起) FF 01 00 00 00 00 01三、辅助继电器控制命令AU X 1 : (断开) FF 01 000B 00 010D (闭合) FF01 00 09 00 01 0BAU X 2: (断开) FF 01 00 0B 00 02 0E (闭合) FF 01 00 09 00 02 0CAU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0DAU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E说明:1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCOD协议
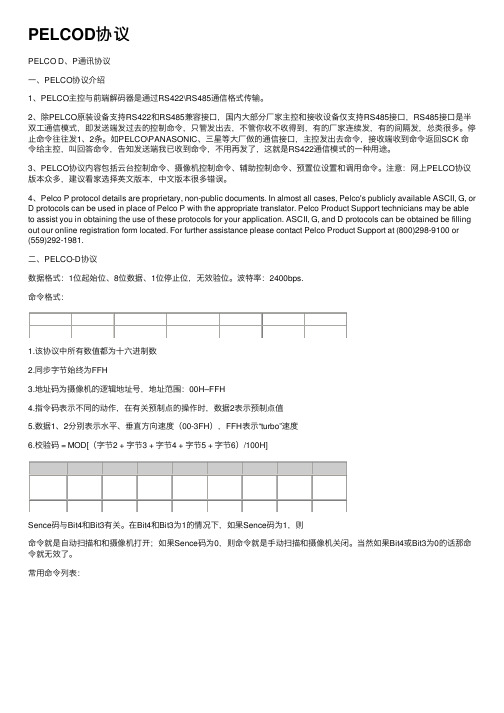
PELCOD协议PELCO D、P通讯协议⼀、PELCO协议介绍1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备⽀持RS422和RS485兼容接⼝,国内⼤部分⼚家主控和接收设备仅⽀持RS485接⼝,RS485接⼝是半双⼯通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的⼚家连续发,有的间隔发,总类很多。
停⽌命令往往发1、2条。
如PELCO\PANASONIC、三星等⼤⼚做的通信接⼝,主控发出去命令,接收端收到命令返回SCK 命令给主控,叫回答命令,告知发送端我已收到命令,不⽤再发了,这就是RS422通信模式的⼀种⽤途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调⽤命令。
注意:⽹上PELCO协议版本众多,建议看家选择英⽂版本,中⽂版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, orD protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981.⼆、PELCO-D协议数据格式:1位起始位、8位数据、1位停⽌位,⽆效验位。
pelco-p协议和pelco-d协议地址

编号:_______________本资料为word版本,可以直接编辑和打印,感谢您的下载pelco-p协议和pelco-d协议地址甲方:___________________乙方:___________________日期:___________________pelco-p协议和pelco-d 协议地址篇一:pelco-d 与pelco-p 协议区另Upelco-d 与pelco-p 协议区另U曼码协议是ad品牌的协议,通用性很好,派尔高p、d 协议是派而高自己的协议,所以用矩阵控制快球,要考虑协议的问题,大部分矩阵厂家都提供协议转换器,而且大多数快球厂家也把解码器内内置多种协议,基本没有匹配问题,都是485的控制协议。
pelco-d:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400b/s命令格式:1. 该协议中所有数值都为十六进制数2. 同步字节始终为FFh3. 地址码为摄像机的逻辑地址号,地址范围:00h - FFh4. 指令码表示不同的动作5. 数据码1、2分别表示水平、垂直方向速度(00-3Fh ) ,FFh 表示“turbo ”速度6. 校验码=mod[(字节2+字节3+字节4+字节5+字节6)/100h]以地址码0x01为例:(0xff,0x01,0x00,0x08,0x00,0xff,0x08,}// 上(0xff,0x01,0x00,0x10,0x00,0xff,0x10,}// 下(0xff,0x01,0x00,0x04,0xff,0x00,0x04,}// 左(0xff,0x01,0x00,0x02,0xff,0x00,0x02,}// 右(0xff,0x01,0x00,0x20,0x00,0x00,0x21,}// 变倍短(0xff,0x01,0x00,0x40,0x00,0x00,0x41,}// 变倍长(0xff,0x01,0x00,0x80,0x00,0x00,0x81,}// 聚焦近(0xff,0x01,0x01,0x00,0x00,0x00,0x02,}// 聚焦远(0xff,0x01,0x02,0x00,0x00,0x00,0x03,}// 光圈小(0xff,0x01,0x04,0x00,0x00,0x00,0x05,}// 光圈大(0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}// 灯光关(0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}// 灯光开(0xff,0x01,0x00,0x07,0x00,0x01,0x09,}// 转至预置点001(0xff,0x01,0x00,0x03,0x00,0x01,0x05,}// 设置预置点001(0xff,0x01,0x00,0x05,0x00,0x01,0x07,}// 删除预置点001以上对应的停命令均是:(0xff,0x01,0x00,0x00,0x00,0x00,0x01,}// 停命令pelco-p:数据格式:1位起始位、8位数据、1位停止位,无效验位。
pelco协议
pelco协议Pelco协议。
Pelco协议是一种用于视频监控系统的通讯协议,它定义了摄像机和控制设备之间的通讯方式,使得用户可以通过控制设备对摄像机进行控制和监控。
Pelco协议的应用范围非常广泛,几乎所有的视频监控设备都支持Pelco协议,因此了解Pelco协议的原理和应用对于视频监控系统的设计和维护具有重要意义。
首先,Pelco协议采用了串行通讯方式,通讯速率一般为2400、4800、9600、19200或者38400 bps。
这种通讯方式可以保证数据传输的稳定性和可靠性,适用于长距离的数据传输。
此外,Pelco协议采用了异步通讯方式,即数据的传输不需要时钟信号,这样可以减少通讯线路的复杂性,提高了系统的稳定性。
其次,Pelco协议定义了一套丰富的指令集,用于控制摄像机的各种功能。
这些指令包括云台的上下左右移动、变焦、聚焦、预置位设置等功能,用户可以通过控制设备发送这些指令来实现对摄像机的远程控制。
此外,Pelco协议还支持多种协议格式,包括Pelco-D、Pelco-P等,可以满足不同厂家、不同型号的设备之间的通讯需求。
另外,Pelco协议还具有较强的扩展性和灵活性。
用户可以根据自己的需求定制特定的控制指令,以满足特定的应用场景。
同时,Pelco协议还支持多种数据传输格式,包括ASCII码、二进制码等,这样可以适应不同的通讯环境和设备要求。
总的来说,Pelco协议作为视频监控系统中最重要的通讯协议之一,具有通讯速率快、稳定可靠、功能丰富、扩展性强等特点,为视频监控系统的设计和应用提供了重要的支持。
在实际应用中,用户需要根据自己的实际需求选择合适的通讯速率、协议格式和控制指令,以确保系统的稳定性和可靠性。
总之,了解Pelco协议的原理和应用对于视频监控系统的设计和维护具有重要意义。
希望本文的介绍能够帮助用户更加深入地了解Pelco协议,并能够在实际应用中发挥其最大的作用。
Pelco协议的不断发展和完善,必将为视频监控系统的发展带来更多的便利和可能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制协议
1、通令参数:
标准速率为4800bps,无校验,8位数据位,1位停止位
2、命令串格式:
同步字节为。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号
校验字节为Word2到Word 6的检验和(Checksum
校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H]
Comma nd 1 and Comma nd 2 女口下:
注:云台自动由Comma nd 的Bit 7 和Bit 控制:为时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FH
Data2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。
控制线连接方式:A 485+
B 485-
TX+ 485+
解码器控制代码示例
若非特意注明,控制1号解码器为例
、镜头控制命令 光圈:开(按下)
FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下)
FF 01 04 00 00 00 05 (弹起)
FF 01 00 00 00 00 01 变倍:小(按下)
FF 01 00 20 00 00 21 (弹起)
FF 01 00 00 00 00 01 大(按下)
FF 01 00 40 00 00 41 (弹起)
FF 01 00 00 00 00 01 聚焦:近(按下)
FF 01 01 00 00 00 02 (弹起)
FF 01 00 00 00 00 01 远(按下)
FF 01 00 80 00 00 81
(弹起)
FF 01 00 00 00 00 01
三、辅助继电器控制命令
AU X 1 : (断开) FF 01 00
0B 00 01 0D (闭合) FF 01 00 09 00 01 0B
AU X 2: (断开) FF 01 00
0B 00 02 0E (闭合) FF 01 00 09 00 02 0C
AU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0D AU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E
说明:
1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。
2、 要求软件可设置镜头及辅助继电器控制按钮的标题。
3、 辅助继电器的控制有两种方式,要求软件可由用户选择控制方式:
按钮式:按钮按下时发出继电器闭合控制命令
,反之弹起时发出继电器断开控制命令。
开关式:按一下按钮发出继电器闭合控制命令,再按一下则发出断开命令。
TX- 485-
上:
(按下)FF 2号上: (按下) F F 下: (按下) F F 左: (按下)
F
F 右: (按下) F
F
自动: (开) FF 0 01 00 08 00 2F 38
02 00 08 00 2F 39
01 00 10 00 2F 40 01 00 04 2F 00 34 01 00 02 2F 00 32
90 00 00 00 91
(弹起)FF 01 00 00 00 00 01 (弹起)FF 02 00 00 00 00 02 (弹起)FF 01 00 00 00 00 01 (弹起)FF 01 00 00 00 00 01 (弹起)FF 01 00 00 00 00 01 (关) FF 01 00 00 00 00 01 、云台动作命令。