坐标方位角连续计算 fx-5800计算器编程
5800计算器全线坐标计算放样程序

5800计算器全线坐标计算放样程序(修改第三版)“XLZBJSCX”◢LB1 0 ↙CLS : FIX 4 : 30→DIM Z ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视方位角)LB1 1 ↙“K=”?K ◢(计算里程)IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O (注:左偏曲线输入-1→O,右偏曲线输入1→O): 偏角→A:半径→R : 第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点 X→B :交点 Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : GOTO 2 : IFEND↙…………(曲线段分段输入)补充直线段输入如下IF K<本段直线终点里程 AND K≥本段直线起点里程:THEN 1→O:本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E:GOTO 4:IFENDLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→S ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙ (切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙ (切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]-S→Z[3] ↙ (ZH点里程)Z[3]+ Z[6]→Z[4] ↙ (HY点里程)Z[1]- Z[7]→Z[5] ↙ (YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →X : 0→Y : E→T : PROG“TYZBCX”:GOTO 1 ↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →X ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Y ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙PROG“TYZBCX”:GOTO 1 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→X ↙R*(1-COS T)+ Z[10]→Y ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙PROG“TYZBCX”:GOTO 1 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*SIN A→X ↙Z[13]*SIN A-U*SIN A+V*COS A→Y ↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙PROG“TYZBCX”:GOTO 1 ↙子程序:“TYZBCX”↙(统一坐标计算)IF O<0 : THEN -Y→Y : IFEND ↙“QXJ=” :T◢(计算里程点切线方位角,可以不显示)Z[16]+X*COS E-Y*SIN E→Z[18] ↙Z[17]+X*SIN E+Y*COS E→Z[19] ↙“XI=” : Z[18] ◢(中线X)“YI=” : Z[19] ◢(中线Y)Pol(Z[18]-M,Z[19]-N):"DI=":I(中桩放样距)◢J<0=>J+360→J:"FI=":J→DMS◢(中桩放样方位角)“PJ=”?P◢ (输入边桩与线路夹角,左-右+)“PD=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SIN(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"DP=":I◢(边桩放样距)J<0=>J+360→J:"FP=":J→DMS◢(边桩放样方位角)RETURN↙------------------------------------------卡西欧5800计算器道路程序精简版(坐标正反算,程序模块化设计,可自行升级,扩展功能)建议录入程序次序KEYLOCK 锁键程序可独立测试能正常运行 1DISPLAYXYZ 主程序可独立测试能正常运行 2READDAT 要素数据库文件(请改为自已路线的要素) 3ZBJS 坐标计算程序 4INZHANDZBJS 桩号、横距输入程序 5TURNZH 坐标反算 6INNEZ 实测坐标输入程序7如正确输入以上程序,运行DISPLAYXYZ,按“0”进行坐标反算,按“.”进行坐标正算。
卡西欧FX5800程序
FX-5800计算器公路测量常用程序本程序由6个主程序、5个次子程序及5个参数子程序组成。
主要用于公路测量中坐标正反算,设计任意点高程及横坡计算,桥涵放样,路基开挖口及填方坡脚线放样。
程序坐标计算适应于任何线型.二、源程序1.主程序1:一般放样反算程序(①正算坐标、放样点至置仪点方位角及距离;②反算桩号及距中距离)程序名:1ZD-XYLb1 0:Norm 2F=1:(正反算判别,F=1正算,F=2反算,也可以改F前加?,改F为变量)Z[1]=90(与路线右边夹角)Prog"THB":F=1=>Goto 1:F=2=>Goto 2Lb1 1:Fix 3:"X=":Locate 6,4,X◢"Y=":Locate 6,4,Y◢Prog"3JS”:Goto 0:Lb1 2:Fix 3:"KM=":Locate 6,4,Z◢"D=":Locate 6,4,D◢Goto 02.主程序2:高程序横坡程序(设计任意点高程及横坡)程序名:2GCLbI 0:Norm 2“KM”?Z:?D:Prog”H”:Fix 3:”H=”:Locate 6,4,H◢“I=”: Locate 6,4,I◢Goto 03.主程序3:极坐放样计算程序(计算放样点至置仪点方位角及距离)程序名:3JSX:Y:1268.123→K(置仪点X坐标)2243.545→L(置仪点Y坐标,都是手工输入,也可以建导线点数据库子程序,个人认为太麻烦)Y-L→E:X-K→F:Pol(F,E):IF J<0:Then J+360→J:Int(J)+0.01Int(60Frac(J))+0.006Frac(60Frac(J)) →J:(不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢来直接显示) Fix 4:” FWJ=”: Locate 6,4,J◢(不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢来直接显示)Fix 3:”S=”:Locate 6,4,I◢4.主程序4:涵洞放样程序(由涵中心桩号计算出各涵角坐标、在主程序3中输入置仪点坐标后计算放样点至置仪点方位角及距离)程序名:4JH-XYLbI 0:Norm 290→Z[1](涵洞中心桩与右边夹角,手工输入,也可以修改成前面加?后变为变量)1→F:Prog”THB”:?L:Z[2]-Z[1] →E:X+Lcos(E) →X:Y+Lsin(E) →Y:Fix 3: "X=":Locate 6,4,X◢"Y=":Locate 6,4,Y◢Prog"3JS”:Goto 0:5.主程序5:路基开挖边线及填方坡脚线放样程序(输入大概桩号及测量坐标、地面标高计算出偏移距离、桩号、距中距离、填挖高度)程序名:5FBXLbI 0:Norm 2: 18→DimZ:2→F:90→Z[1]:Prog “THB”:Z:D:”M0”?M:M→Z[4]:D→Z[3]:Prog”6GD”:L→Z[6]:If D<0:Then 0.75-L→D:Goto H:Else L-0.75→D:Goto H:IfEndLbI H:Prog”H”:H-0.03-Z[4] →Z[5]:Z[6] →L:If Z[5]<0:Then –z[5] →G:Goto W:Else Z[5] →G:Goto T:LbI W:Prog “W0”:Z[10]+Z[11] →A: If G>A:Then Goto 1:Else If G>Z[10]:Then Goto 2:Else Goto 3:IfEnd:LbI 1:L+Z[12]+Z[13]+Z[14]+(G-A)×Z[9]+Z[11]×Z[8]+Z[10]×Z[7]:Goto Z:LbI 2:L+Z[12]+Z[13]+(G-Z[10])×Z[8]+Z[10]×Z[7]:Goto Z:LbI 3:L+Z[12]+G×Z[7]:Goto z:LbI T:L+0.5→N:If G>Z[17]:Then (N+Z[18]+(G-Z[17])×Z[16]+Z[17]×Z[15])→S:Goto Z:Else (N+G×Z[15])→S:Goto z:LbI Z:Z[3]→D:Fix 2:Abs(D)-S→T:”L0=”:L Locate 6,4,T◢"KM=":Locate 6,4,Z◢"D=":Locate 6,4,D◢“TW=”: Locate 6,4,Z[5]◢Goto 06.主程序6:路基标准半幅宽度计算程序(对于设计有加宽渐变的有用,如路基宽度无变化,则把此程序直接输入半幅宽度值至L)程序名:6GDProg “G0”Z-C→E:(B-A)×E/S+A→L:L:7.坐标计算次程序(THB)程序名:THB18→DimZ:"KM"?Z:Prog "X0"1÷P→C:(P-R)÷(2HPR) →S:180÷π→E:F=1=>Goto 1:F=2=>Goto 2←┘Lbl 1:?D:Abs(Z-O) →W:Prog "A":X:Y:Goto 3LbI 2:X:Y:X→I:Y→J:Prog "B":O+W→Z:D→D:Goto 3LbI 3:IF F=1Then X:Y:Else Z:D8. 正算子程序(A)程序名:A0.1184634425→A:0.2393143352→B:0.2844444444→N 0.046910077→K:0.2307653449→L:0.5→M:U+W(Acos(G+QEKW(C+KWS))+Bcos(G+QELW(C+LW S))+Ncos(G+QEMW(C+MW S))+Bcos(G+QE(1-L)W(C+(1-L)WS))+Acos(G+QE(1-K)W(C+(1-K)WS))) →X:V+W(Asin(G+QEKW(C+KWS))+Bsin(G+QELW(C+LW S))+Nsin(G+QEMW(C+MWS))+Bsin(G+QE(1-L)W(C+(1-L)WS))+Asin(G+QE(1-K)W(C+(1-K)WS))) →Y:G+QEW(C+WS)+Z[1]→Z[2]:X+Dcos(Z[2])→X:Y+Dsin(Z[2])→Y9. 反算子程序(B)程序名:BG-90→T:Abs((Y-V)cos(T)-(X-U)sin(T)) →W:0→D:Lbl 0:Prog "A":T+QEW(C+W S) →L:(J-Y)cos(L)-(I-X)sin(L)→D:IF Abs(D)<0.01:Then Goto1:Else W+D→W:Goto 0←┘Lbl 1:0→D:Prog "A":(J-Y)÷sin(Z[2]) →D:10.高程计算子程序(H)程序名:HProg “S0”:R:T:C:G:I:C-T→F:Z-F→L:C+T→E:G-TI→Q:If T=O:Then Q+LI→H:Goto 0:Else If Z<F:Then Q+LI→H:Goto 0:Else If Z≤E:Then Q+LI+L2÷2÷R→H:Goto 0:LbI 0:H:If D=0:Then Goto I:Else Prog “I”:H+V→H:Goto I:LbI I:H:I:11.高程超高计算程序(I)程序名:IProg”I0”:W=1=> Goto 0:W=2=>Goto 1:LbI 0:If L=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×((N-M)×(Z-C)÷L+M)→V:Goto 2:IfEnd: LbI 1:If L=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×(((3((Z-C)÷L)2-2((Z-C)÷L)∧(3))×(N-M))+M)→V:Goto 2:IfEnd:LbI 2:Abs(D)→E:V÷E→I:I(E-K)→V:12.数据子程序(附后示例)①程序名:X0(坐标计算要素程序)If Z≥25900 And Z≤26615.555:Then 25900→O:11587.421→U:1847.983→V:101。
卡西欧5800计算器编程入门程序集
fx-5800P易学易用程序集卡西欧(中国)贸易有限公司版程序列表备注;;用户对用本书疑问,请发邮件到:gongchengji@ 。
欢迎交流!卡西欧的客服热线:400-700-6655。
联系:gongchengji@ 。
G1G2G3G4G5G6G7G8G9G10G111-1G12G12-10-10-2fx-5800P G2011-9-30...常用测量程序1极坐标放样程序(已知坐标计算边长、方位角计算程序),程序名5 J<0J+360→J把小于6 7 "FWJ=":J DMS ◢显示方位角2已知边长方位角计算坐标程序,程序名3建筑轴线偏移程序(或扩大基础程序)。
程序名()()4测角前方交会坐标计算,程序名5测角后方交会坐标计算,程序名3 Pol((C –A),(D –B)) : J<0J+360→J : J →Z[4] 计算点()的方位角4 Pol((E –A),(F –B)) : J<0J+360→J : J →Z[5]计算点()的方位角5 6 Z[1]<0Z[1]+360→Z[1]计算点()的顶角并存贮到变量 7 Pol((E –C),(F –D)): J<0J+360→J : J →Z[4] 计算点()的方位角 8 Pol((A –C),(B –D)): J<0J+360→J : J →Z[5] 计算点()的方位角9Z[4]-Z[5]→Z[2]方位角计算顶角10 Z[2]<0Z[2]+360→Z[2]计算点()的顶角并存贮到变量 11 Pol((A –E),(B –F)) : J<0J+360→J :J →Z[4] 计算点()的方位角 12 Pol((C –E),(D –F)) : J<0J+360→J : J →Z[5]计算点()的方位角13 14 Z[3]<0Z[3]+360→Z[3]计算点()的顶角并存贮到变量 15 tan(Z[1]) tan(G) ÷(tan(Z[1])- tan(G))→Z[7] 计算点()的参数 计算点()的参数 计算点()的参数()()()6坐标转换计算程序,程序名-D ()()()7直线中边桩坐标计算程序,程序名8圆曲线中边桩坐标计算程序,程序名9完整缓和曲线中边桩坐标计算程序,程序名fx-5800P 程序使用流程:本程序数据和主程序是分开的,编程时将不同的工程数据存放到不同的数据文件里,如A匝道,文件名为A ,将匝道A 所有的曲线线元参数输入A文件里。
卡西欧5800计算器坐标正反算程序
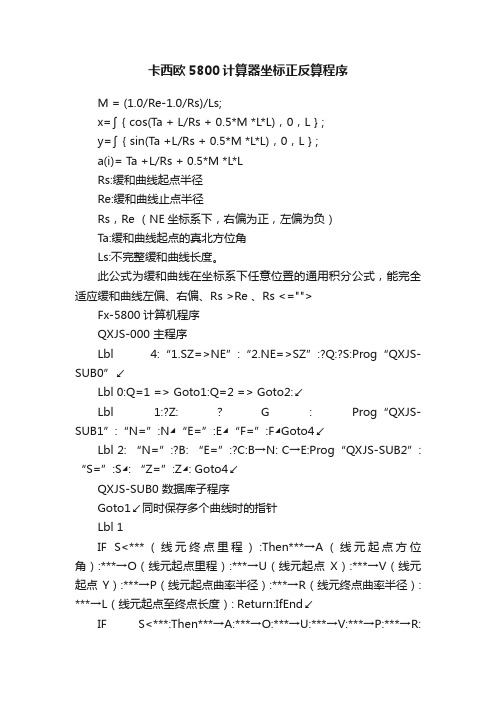
卡西欧5800计算器坐标正反算程序M = (1.0/Re-1.0/Rs)/Ls;x=∫{cos(Ta + L/Rs + 0.5*M *L*L),0,L};y=∫{sin(Ta +L/Rs + 0.5*M *L*L),0,L};a(i)= Ta +L/Rs + 0.5*M *L*LRs:缓和曲线起点半径Re:缓和曲线止点半径Rs,Re (NE坐标系下,右偏为正,左偏为负)Ta:缓和曲线起点的真北方位角Ls:不完整缓和曲线长度。
此公式为缓和曲线在坐标系下任意位置的通用积分公式,能完全适应缓和曲线左偏、右偏、Rs >Re 、Rs <="">Fx-5800计算机程序QXJS-000 主程序Lbl 4:“1.SZ=>NE”:“2.NE=>SZ”:?Q:?S:Prog“QXJS-SUB0”↙Lbl 0:Q=1 => Goto1:Q=2 => Goto2:↙Lbl 1:?Z:?G:Prog“QXJS-SUB1”:“N=”:N◢“E=”:E◢“F=”:F◢Goto4↙Lbl 2: “N=”:?B: “E=”:?C:B→N: C→E:Prog“QXJS-SUB2”: “S=”:S◢: “Z=”:Z◢: Goto4↙QXJS-SUB0 数据库子程序Goto1↙同时保存多个曲线时的指针Lbl 1IF S<***(线元终点里程):Then***→A(线元起点方位角):***→O(线元起点里程):***→U(线元起点X):***→V(线元起点Y):***→P(线元起点曲率半径):***→R(线元终点曲率半径): ***→L(线元起点至终点长度): Return:IfEnd↙IF S<***:Then***→A:***→O:***→U:***→V:***→P:***→R:***→L: Return:IfEnd↙………………………..为了便于解读,每增加一个线元增加一行语句,每增加一条曲线增加一个Lbl,每增加一个工程增加一个文件。
CASIO fx-5800计算器测量坐标程序
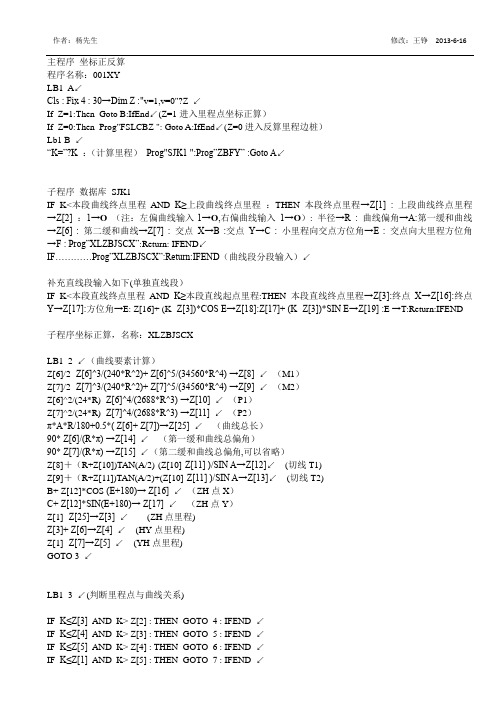
主程序坐标正反算程序名称:001XYLB1 A↙Cls : Fix 4 : 30→Dim Z :"v=1,v=0"?Z ↙If Z=1:Then Goto B:IfEnd↙(Z=1进入里程点坐标正算)If Z=0:Then Prog"FSLCBZ ": Goto A:IfEnd↙(Z=0进入反算里程边桩)Lb1 B ↙“K=”?K :(计算里程)Prog"SJK1 ":Prog”ZBFY” :Goto A↙子程序数据库 SJK1IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O(注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R : 曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Prog”XLZBJSCX”:Return: IFEND↙IF…………Prog”XLZBJSCX”:Return:IFEND(曲线段分段输入)↙补充直线段输入如下(单独直线段)IF K<本段直线终点里程AND K≥本段直线起点里程:THEN 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z[3])*COS E→Z[18]:Z[17]+ (K- Z[3])*SIN E→Z[19] :E →T:Return:IFEND子程序坐标正算,名称:XLZBJSCXLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙(切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙(切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]- Z[25]→Z[3] ↙(ZH点里程)Z[3]+ Z[6]→Z[4] ↙(HY点里程)Z[1]- Z[7]→Z[5] ↙(YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : GOTO 8↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23]↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→Z[23] ↙R*(1-COS T)+ Z[10]→Z[24] ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*S IN A→Z[23] ↙Z[13]*SIN A-U*SIN A+V*COS A→Z[24]↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙GOTO 8 ↙LLb1 8IF O<0 : THEN - Z[24]→Z[24] : IFEND ↙Z[16]+Z[23]*COS E-Z[24]*SIN E→Z[18] ↙Z[17]+Z[23]*SIN E+Z[24]*COS E→Z[19] ↙ReTurn↙子程序反算里程边桩,名称:FSLCBZLb1 1↙"POINT=X"?X:" POINT=Y"?Y↙(输入任意测点的XY坐标):“K=”?K (试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)↙Lb1 2↙Prog"SJK1 ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"SJK1":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else IF Q<S: THEN K+Q→K: Goto 2 :Else IF Q>S :THEN K-Q→K:Goto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"W(-Z,Y+)=":I◢(偏距)(由于该程序不能准确判断边桩左右方向,暂作修改,取消左右边判定)"K=":K+S→K◢(里程)Return↙子程序坐标放样:ZBFYLB1 0 ↙"P(N)="?M:"P(E)="?N ↙“a=”?P◢(输入边桩与线路夹角,左-右+)“W=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SIN(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"HD=":I◢(边桩放样距)J<0=>J+360→J:"HAR=":J→DMS◢(边桩放样方位角)Return↙直线短链要将该直线分成二条直线来对待编制数据库文件即可,曲线长链要单独建判定语句子程序并然后编制二个数据库(按来向里程和去向里程分别推出曲线起终点里程,以此编制曲线段的数据库)。
FX5800(正反算、可现场输入要素,可预先建好数据库)计算坐标

平曲线程序运行提示符CASIO fx—5800P1、该程序可以计算任意线形(直线、圆曲线、缓和曲线、不完整曲线)自然段任意桩号的坐标(正算,输入1),也可根据坐标计算该点到线路的距离及垂足桩号(反算,输入2);2、(NEW=0,Z1 =1)?如果要计算的点为数据库线路中的点,则输入数据库编号(以整数1、2、3…代替输入);如果在数据库中没有要计算线路的数据,则输入曲线要素;3、正算显示坐标及切线方位角及和设站点的距离角度;用坐标放样的可删除这个显示。
反算输入线路的任意桩号(此桩号越接近真实值计算速度越快)、待求点坐标,显示待求点桩号及偏中距离;4、正算子程序为积分公式编写而成;反算子程序为角度趋近的方法编写,计算速度有点慢。
5、此程序显示较直观,结果在同一屏幕显示。
注* :程序中乘号用*标示,其余为X。
欢迎加入QQ群42284044 66262135 一起学习分享资料有51的朋友可以加入51群/ziyoushezhanFX5800(正反算、可现场输入要素,可预先建好数据库)计算中边桩坐标Z 主程序“NEW=0,Z1 =1”?ZIf Z=0:Then “X0=”?A: “Y0=”?B:“C0=”?C:“1/R0=”?D:“1/RI=”?E:“DKA=”?F:“DK B=”?G:Ifend:"1.ZS,2.FS" ?→Q输入1正算,输入2反算Q=2=>Goto 2Lbl 1 :“DK?=,<0 Stop”?H:H<0=>Stop:“PJ=”?O:“P L=”?LLbl Z:Z=1=>Prog“01”Z=2=>Prog“02”(不想用数据库的可不写入。
选择数据库文件,可增加,)H- F→X:0.5(E-D)÷(G-F)→NC+(XD+NX2)*180÷π→P:P<0=>P+360→P:P>360=>P-360→PA+∫(cos(C+(XD+NX2)*180÷π),0,X)+Lcos(P+O)→UB+∫(sin(C+(XD+NX2)*180÷π),0,X)+Lsin(P+O)→VQ=2=>Goto 4:Cls:Fix 3"Xn=":Locate 4,1,U:"Yn=": Locate 4,2,V:Norm 2:Cls:Goto 1Lbl 2:“XD=,<0,STOP”?R:R<0=>Stop:“YD=”?S“D K=”?H :90→O:0→L:Goto Z (H线路范围内的大约里程)Lbl 4:Pol(R-U,S-V):J<0 => J+360→JWhile abs(Icos(J-P))≤0.001:P-J>180=> J+360→J:P-J<-180=> P+360→P:IF P-J> 0:then -I→L:else I→L ifendGoto 3: Whileend:H+Icos(J-P)→H:Goto ZLbl 3:Cls:Fix 3“KM=”: Locate 4,1,H:“PY=”: Locate 4,2,L◢Norm 2:Cls:Goto 2Z1(数据库子程序)If H<=第一曲线终点桩号:then 第一曲线起点X→A:第一曲线起点Y→B:第一曲线起点方位角→C:起点曲率→D:终点曲率→E:起点桩号→F:终点桩号→G:return:ifend……………。
5800计算器全线坐标计算放样正反算程序
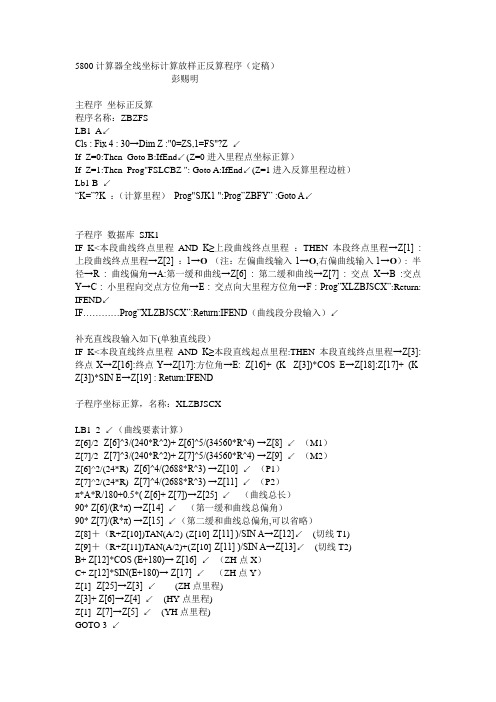
5800计算器全线坐标计算放样正反算程序(定稿)彭赐明主程序坐标正反算程序名称:ZBZFSLB1 A↙Cls : Fix 4 : 30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙(Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCBZ ": Goto A:IfEnd↙(Z=1进入反算里程边桩)Lb1 B ↙“K=”?K :(计算里程)Prog"SJK1 ":Prog”ZBFY” :Goto A↙子程序数据库 SJK1IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O(注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R : 曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Prog”XLZBJSCX”:Return: IFEND↙IF…………Prog”XLZBJSCX”:Return:IFEND(曲线段分段输入)↙补充直线段输入如下(单独直线段)IF K<本段直线终点里程AND K≥本段直线起点里程:THEN 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z[3])*COS E→Z[18]:Z[17]+ (K- Z[3])*SIN E→Z[19] : Return:IFEND子程序坐标正算,名称:XLZBJSCXLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙(切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙(切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]- Z[25]→Z[3] ↙(ZH点里程)Z[3]+ Z[6]→Z[4] ↙(HY点里程)Z[1]- Z[7]→Z[5] ↙(YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : GOTO 8↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→Z[23] ↙R*(1-COS T)+ Z[10]→Z[24] ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*S IN A→Z[23] ↙Z[13]*SIN A-U*SIN A+V*COS A→Z[24]↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙GOTO 8 ↙LLb1 8IF O<0 : THEN - Z[24]→Z[24] : IFEND ↙Z[16]+Z[23]*COS E-Z[24]*SIN E→Z[18] ↙Z[17]+Z[23]*SIN E+Z[24]*COS E→Z[19] ↙ReTurn↙子程序反算里程边桩,名称:FSLCBZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的XY坐标):“K=”?K (试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)↙Lb1 2↙Prog"SJK1 ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"S JK1":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else IF Q<S: THEN K+Q→K: Goto 2 :Else IF Q>S :THEN K-Q→K:G oto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)(由于该程序不能准确判断边桩左右方向,暂作修改,取消左右边判定)"K=":K+S→K◢(里程)Return↙子程序坐标放样:ZBFYLB1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视方位角) “QXJ=” :T◢(计算里程点切线方位角,可以不显示)“XI=” : Z[18] ◢(中线X)“YI=” : Z[19] ◢(中线Y)Pol(Z[18]-M,Z[19]-N):"DI=":I(中桩放样距)◢J<0=>J+360→J:"FI=":J→DMS◢(中桩放样方位角)“PJ=”?P◢(输入边桩与线路夹角,左-右+)“PD=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SI N(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"DP=":I◢(边桩放样距)J<0=>J+360→J:"FP=":J→DMS◢(边桩放样方位角)Return↙。
f5800计算器线路整套使用程序(升级版)【坐标、高程、超高、通用程序】
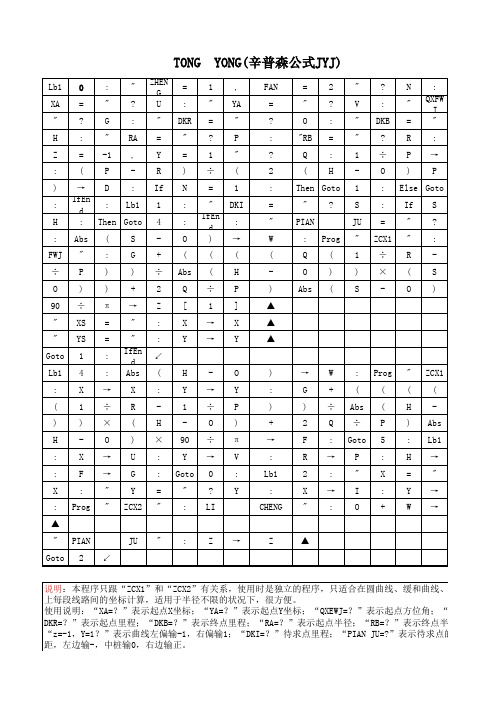
YONG(辛普森公式JYJ)
, YA " P " ( 1 DKI : → ( H P ] X Y FAN = ? : ? 2 : = " W ( ) ▲ ▲ ▲ = " O "RB Q ( 2 ? : = : H " V " " 1 1 S JU Prog ( ) ( " 1 ) S ? : DKB ? ÷ O : : = ZCX1 ÷ × N " = R P ) : QXFWJ " : → P
O Y P ) π V : Y
) : ) + → : Lb1 : CHENG
→ G ) 2 F R 2 X "
W + ÷ Q : → : → :
: ( Abs ÷ Goto P " I O
Prog ( ( P 5 : X : +
" ( H ) : H = Y W
ZCX1 ( Abs Lb1 → " → →
DKR=?”表示起点里程;“DKB=?”表示终点里程;“RA=?”表示起点半径;“RB=?”表示终点半径; “z=-1,Y=1?”表示曲线左偏输-1,右偏输1;“DKI=?”待求点里程;“PIAN JU=?”表示待求点的边 距,左边输-,中桩输0,右边输正。
" = ? " C R 2 > Z " 1 ×
TONG
Lb1 XA " H Z : ) : H : FWJ ÷ O 90 " " Goto Lb1 : ( ) H : : X : ▲ " Goto PIAN 2 ↙ JU " : Z 0 = ? : = ( → IfEnd : Abs " P ) ÷ XS YS 1 4 X 1 ) X F : Prog : " G " -1 P D : " ? : RA , : Lb1 ZHENG U " = Y R If 1 4 + ÷ 2 Z : : ↙ ( : H × : : = = : DKR " = ) N : : O ( Abs Q [ X Y 1 " = ? 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标方位角连续计算fx-5800计算器编程
摘要:利用fx-5800计算器可编程的特点,编写坐标方位角连续计算程序,使计
算方位角的工作变得简单易行,并且工作量大幅度降低。
关键词:方位角;左侧转角;导线
Abstract: using fx-5800 calculator programmable characteristics, write coordinates continuous calculation program azimuth, make millions
Calculate azimuth of work has become simple and feasible, and greatly reduce the workload.
Keywords: azimuth; The left corner; wire
一、基本原理
如上图,沿A B1 2 3 4 5方向测得左侧转角分别为、、、、
;AB方向的坐标方位角为。
则:B1方向坐标方位角为
①当时,
②当时,
③当时,
12方向坐标方位角为
①当时,
②当时,
③当时,
2 3方向坐标方位角为
①当时,
②当时,
③当时,
3 4方向坐标方位角为
①当时,
②当时,
③当时,
4 5方向坐标方位角为
①当时,
②当时,
③当时,
二、源程序
FWJJS 程序名
0J:0 B:”N=“?J
Lbl1
“ =“?B
J+B J
IfJ<1800:Then J+1800J:N=J: “N=“:J►DMS◢
Goto 1
Else If J≥5400:Then J-5400 J:N=J: “N=“:J►DMS◢
Else J-1800 J:N=J:”N=“:J►DMS◢
IfEnd:Goto 1
三、程序运行
【例】已知AB边的坐标方位角,由B点起始向前分别实测了1、2、3、4导线点,已知数据如下,计算B1、12、23、34边的坐标方位角。
已知边实测水平角
NAB=
操作步骤
按MODE 5 2 按▲▼键,当文件名为TLX—FWJJS高亮度显示时,按EXE 。
此时屏幕显示N=?,此时输入AB边坐标方位角,显示?,输入B点实测水平角,显示,即为B1边的坐标方位角。
再按EXE 显示?,输入1号点实测水平角,显示,即为12边的坐标方位角。
再按EXE 显示?,输入2号点实测水平角,显示,即为23边的坐标方位角。
再按EXE 显示?,输入3号点实测水平角,显示,即为34边的坐标方位角。
注:1、运算时注意导线前进方向要统一;
2、水平角要用导线前进方向的左角;
3、计算后的方位角是各边前进方向的坐标方位角;
四、各种字符录入方法
:FUNCTION 3 2
: EXE
?: FUNCTION 3 1
If: FUNCTION 3 3
Then : FUNCTION 3 4
Else : FUNCTION 3 5
IfEnd: FUNCTION 3 6
Lb1: FUNCTION 3 7
Goto : FUNCTION 3 8
≥ : FUNCTION 3▼5
<: FUNCTION 3▼4
: FUNCTION 3▼ ▼3
For : FUNCTION 3▼ ▼▼ 1
To: FUNCTION 3▼ ▼ ▼ 2
Next: FUNCTION 3▼ ▼ ▼ 2
[]:ALPHA ln ALPHA X■
List:FUNCTION 7 1 1
: :ALPHA■
Freg:FUNCTION 7 1 2
结语:煤矿井下导线测量是煤炭生产中经常性工作,频率较高。
本程序使计算方位角的
工作量大幅降低,具有广泛的应用性。
【参考文献】
[1]覃辉,段长.fx-9860G SD矩阵串列编程计算器实用测量程序.华南理工大学出版社,出版时间:2006.10.1.
[2]覃辉,覃楠.CASIO fx-5800编程计算器基于数据库子程序的测量程序与案例. 同济大学出版社,2010.6.1.
[3]葛永慧.测量平差.中国矿业大学出版社,2005.2
注:文章内所有公式及图表请用PDF形式查看。