MM440变频器如何实现带反馈的矢量控制
变频器矢量控制原理
变频器矢量控制原理
变频器矢量控制原理是一种用于控制三相异步电动机的方法。
它基于矢量算法,通过测量和处理电机的电流和转速信号,并将其转化为电机控制信号,实现对电机的精确控制。
变频器矢量控制的核心原理是将电机的转子电流和转速向量解耦,分别控制它们的大小和相位。
在传统的矢量控制算法中,主要包括转速闭环控制和电流闭环控制两个环节。
转速闭环控制主要通过测量电机的转速,并将其与期望转速进行比较,得到转速误差信号。
然后根据这个误差信号,通过PID控制算法计算得到控制电机转速的控制信号。
这个控制信号经过逆正切运算,转化为电机的转子电流矢量。
电流闭环控制主要通过测量电机相电流和直流母线电压,得到电流误差信号。
然后根据这个误差信号,通过PID控制算法计算得到控制电机电流的控制信号。
这个控制信号经过逆正切运算,转化为电机的转子电流矢量。
通过对转速和电流闭环控制的协调控制,变频器可以实现对电机的精确控制。
在变频器矢量控制中,可以通过改变电机转子电流矢量大小和相位角来改变电机的转矩和转速。
这样,可以实现电机的平滑启动、调速和制动等控制功能。
总之,变频器矢量控制是一种高级的电机控制方法,可以实现对电机的精确控制,提高电机的响应速度和控制精度。
它在工业生产和各种机械设备中得到广泛应用。
MM440变频器4-20mA模拟量输入调试经验分享
把频率设定值P1000 设置为2,端子控制
三、速度控制
如何把4-20mA转化成 0-50Hz?
在坐标中,两点可以固定一条直线。 (
x1,y1) (x2,y2)
..
如何把4-20mA转化成 0-50Hz?
两点与参数对应关系(x1=P0757,y1=P0758) (x2=P0759,y2=P0760)
三、速度控制
如何把4-20mA转化成 0-50Hz? ----参数设置
P2000=50(Hz)基准频率 y2=100%的值
P0756=2 (0-20mA的电流输入选择)
六、其他特色参数
停机时出现了问题: 停机30Min了风机仍然转动,变频器显示运转 5.xxHz 40—70A,同时显示A0911(直流母线超 压VDC Max)。
六、其他特色参数
解决办法: 按停止按钮 然后优化参数,更有A1360特色。
1. 启动时间P1120=360S 2. 停止时间P1121=650S 以前360 3. 速度捕捉再起动P1200=4 4. 自动重启P1210=4 5. 启动力矩提升P1310=50 默认50,P1311=10%
NSA A1360变频器调试经验分享
Prepared by Vation Li
内容
一、简介,接线图 二、启动/停止控制 三、速度控制 四、电流反馈 五、故障反馈 六、其他特色参数 七、参数表
简介
A1360是一台110KW的风机,之前用的是 Danfoss HVAC6000 变频器。2012年春节期间 故障,更换成Siemens MM440 90Kw变频器。
mm440使用
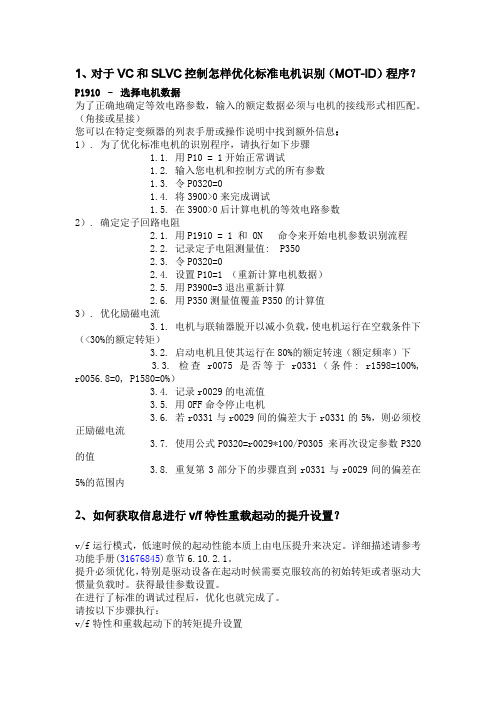
1、对于VC和SLVC控制怎样优化标准电机识别(MOT-ID)程序?P1910 –选择电机数据为了正确地确定等效电路参数,输入的额定数据必须与电机的接线形式相匹配。
(角接或星接)您可以在特定变频器的列表手册或操作说明中找到额外信息:1). 为了优化标准电机的识别程序,请执行如下步骤1.1. 用P10 = 1开始正常调试1.2. 输入您电机和控制方式的所有参数1.3. 令P0320=01.4. 将3900>0来完成调试1.5. 在3900>0后计算电机的等效电路参数2). 确定定子回路电阻2.1. 用P1910 = 1 和 ON 命令来开始电机参数识别流程2.2. 记录定子电阻测量值: P3502.3. 令P0320=02.4. 设置P10=1 (重新计算电机数据)2.5. 用P3900=3退出重新计算2.6. 用P350测量值覆盖P350的计算值3). 优化励磁电流3.1. 电机与联轴器脱开以减小负载,使电机运行在空载条件下(<30%的额定转矩)3.2. 启动电机且使其运行在80%的额定转速(额定频率)下3.3. 检查r0075是否等于r0331(条件: r1598=100%, r0056.8=0, P1580=0%)3.4. 记录r0029的电流值3.5. 用OFF命令停止电机3.6. 若r0331与r0029间的偏差大于r0331的5%,则必须校正励磁电流3.7. 使用公式P0320=r0029*100/P0305 来再次设定参数P320的值3.8. 重复第3部分下的步骤直到r0331与r0029间的偏差在5%的范围内2、如何获取信息进行v/f特性重载起动的提升设置?v/f运行模式,低速时候的起动性能本质上由电压提升来决定。
详细描述请参考功能手册(31676845)章节6.10.2.1。
提升必须优化,特别是驱动设备在起动时候需要克服较高的初始转矩或者驱动大惯量负载时。
获得最佳参数设置。
MM440变频器参数的设置

MM440变频器参数的设置1.主参数设置:a.输入电源参数:设置输入电压和频率,以匹配变频器与电源之间的电气特性。
b.输出电压参数:根据电机额定电压和性能要求,设置输出电压上、下限。
c.网络参数:设置网络供电的频率、最大输出频率以及过载保护等相关参数。
2.控制参数设置:a.控制模式:可以选择恒转矩控制、恒功率控制或速度调节等模式。
b.控制方式:可以选择V/F控制模式或矢量控制模式,根据实际需要进行设置。
c.加速、减速时间:根据实际工况和要求设置合适的加速、减速时间,以避免过大的冲击和损坏。
d.输出频率限制:根据电机特性和负载特性,设置合适的最大输出频率,以防止电机过速。
3.保护参数设置:a.电流保护:根据电机额定电流和负载特性,设置合适的过载保护参数,避免超额电流导致设备损坏。
b.温度保护:设置适当的温度保护参数,以避免设备过热导致损坏。
c.过压、欠压保护:设置合适的过压、欠压保护参数,保护电机和设备的安全运行。
d.故障保护:设置合适的故障保护参数,及时检测和应对设备出现的故障。
4.通信参数设置:a. 通信接口设置:根据实际应用需要,选择适当的通信接口,如RS485、Profibus、Modbus等。
b.通信参数:设置通信速率、奇偶校验等相关参数,以确保与其他设备的通信正常进行。
5.其他参数设置:b.参数备份:定期备份设备参数,以免设备故障时导致参数丢失。
总结:MM440变频器的参数设置直接关系到其在实际应用中的性能和稳定性。
正确设置相关参数可以保证设备的正常运行、提高生产效率和减少故障发生。
除了以上列举的参数设置外,还需根据实际应用情况进行适当的调整,以达到最佳的控制效果和电机保护。
建议在设备安装和调试过程中,根据西门子公司提供的详细操作手册进行操作,以确保正确设置参数。
变频器矢量控制优化步骤

变频器矢量控制优化步骤许多用户在用MM440变频器矢量控制模式时不知道如何正确设置与优化,导致许多问题出现如启动时电流大或不能启动,高速运行时出现F0022故障,低速运行出现反转或冲击现象等.以下列出目前用户做优化的几种不正确方法:
1.不设任何电机参数,仅修改P1300=20.
2.按照说明书的快速调试步骤设定马达的名牌参数,控制模式
P1300=0,快速调试后再修改P1300=20.
3.按照说明书的快速调试步骤设定马达的名牌参数,控制模式
P1300=20,当操作面板出现A541或几条横线,用户认为优化结束.
正确的优化步骤如下:
1.按照说明书的快速调试步骤设定马达的名牌参数.
2.在选择控制模式时设定P1300=20
3.依使用情况设定P1910=1/2/3/4
4.当操作面板出现A541时,用户必须给出启动命令,等待自动优化(优化时间与变频器功率大小有关)
5.在无传感器矢量控制模式运行,低频力矩不够,可考虑加提升(P1610,P1611)
6.如速度响应不够快,可进行速度控制器的优化(P1960)。
MM440变频器的使用

3MM440变频器的使用关于基本操作面板(BOP)的按钮说明,在MM440变频器的操作指南上有详细的介绍,此处不再做介绍。
以下就MM440操作模式以及调试和操作步骤两个方面做介绍。
3.1 MM440变频器的操作模式MM440变频器的操作有三种常用模式:(1)BOP面板操作。
设定P0010=0、P0700=1、P1000=1。
(2)外部信号控制。
设定P0010=0、P0700=2、P1000=2。
(3)Profibus总线控制。
设定P0010=0、P0700=6、P1000=6。
当根据需要设定好操作模式之后,可选择两种方式来启动:一是开启正转启动钮来启动;二是通过P0700(选择接通/ 断开/ 反转(on / off / reverse)命令源)参数值的不同来启动,比如总线命令或者面板等。
3.2 调试和操作步骤在调试时,可在基本操作面板(BOP)上进行。
通电后,BOP的液晶屏显示后,按下键,即可进行参数设置。
具体操作如下:在BOP操作面板上通过按键或,调出P0700,接着按键,显示出P0700的参数值,再按或键,修改P0700的参数值,若此时修改为1,即可启用BOP面板进行控制,最后再次按键,确认参数的设定。
访问标准级(P0003 =1)和扩展级(P0003=2)参数值的设定与修改方法同上述步骤,在此不再赘述。
用BOP操作面板控制需要设定P1000参数值为1。
要进入快速调试模式需要修改P0010,使其参数值为1。
设置电动机频率的最小值(0 Hz)、最大值(50Hz)可分别通过P1080和P1082进行设定。
这些参数值的设定无固定顺序,当以上参数都设置完毕后,再将外部信号控制参数P0010设置为0,即可进入运行准备状态。
在LCD显示状态下,按下启动按钮,即可启动变频器,通过键,设定变频器的工作频率在30~50Hz之间,同时继电器有动作。
此时若要控制一台电动鼓风机的运转速度,可把该设备的插线头接入。
按键,启动鼓风机,要改变鼓风机的转速,可通过BOP面板上的或键调整变频器频率;按键,可使鼓风机改变转动的方向,进行正转或反转的切换。
MM440变频器调试方法
MM440变频器调试方法1.基本连接首先,将MM440变频器与电源连接,确保电源电压和频率与变频器要求一致。
然后,将变频器与电机连接,确保接线正确可靠。
2.参数设置接下来,需要对MM440变频器进行参数设置。
将变频器连接到外部设备(如PC)上,打开调试软件(如Starter或DriveMonitor),通过串口或以太网与变频器进行通信。
然后,根据实际需要,设置变频器的基本参数,如电机额定功率、额定电压、额定转速等。
3.软件调试完成参数设置后,可以进行一些基本的软件调试操作。
首先,在调试软件中选择适当的控制模式(如V/F控制或矢量控制),并设置相应的参数。
然后,通过向变频器发送相应的命令或指令,可以实现变频器的启动、停止、加速、减速等基本功能。
需要注意的是,在调试过程中要根据实际情况调整相关参数,以达到最佳的性能。
4.性能调试一般情况下,调试变频器的目的是为了实现电机的调速控制。
在性能调试阶段,需要根据实际需求,通过调整变频器的各种参数,使电机能够以稳定、准确的速度工作。
可以根据实际情况设置变频器的速度设定、加速时间、减速时间等参数,以满足生产过程中的要求。
5.故障排除如果在调试过程中遇到故障或问题,需要进行故障排除。
首先,可以通过调试软件查看变频器的运行状态、报警信息等,以判断故障的类型和原因。
然后,可以根据故障代码或报警信息,对相应的电路、传感器、接线等进行检查和修复。
需要注意的是,在故障排除过程中要确保电源断开,以保证安全。
6.安全注意事项在使用MM440变频器进行调试时,需要注意以下几点:-在调试过程中要注意电源的接入和断开,避免触电和设备损坏等事故;-在变频器通电前要检查接线是否正确,避免短路和火灾等风险;-在执行操作前要仔细阅读设备的操作手册和安全说明书,了解相关的安全操作规程。
总结起来,MM440变频器调试的一般步骤包括基本连接、参数设置、软件调试、性能调试和故障排除等。
通过合理的参数设置和调试操作,可以使电机实现准确、稳定的调速控制,提高工业生产的效率和质量。
交直流调速系统西门子MM440变频器的操作与运行

第九章 西门子MM440变频器地操作与运行9.1西门子MM440变频器地接线图西门子MM440变频器地操作运行方式9.2变频器地功能参数设置与面板操作运行9.3教 学 内 容9.4变频器地外端子控制运行变频器地多段速控制运行9.5教 学 内 容学 习 目 标熟悉西门子MM440变频器地基本结构,端子接线图与运行方式。
能完成西门子MM440变频器地硬件接线,能进行面板操作与功能参数设置。
9.1西门子MM440变频器地接线图西门子变频器主要型号为:MICROMASTER410/420/430/440系列。
简称MM4X系列。
市场上主要流行地为MM430与MM440系列。
型号特点应用场合备注MM410紧凑型,迷你型三相电动机地调速200,LOGOMM420通用型,基本型调速,网络控制200/300/400MM430风机水泵专用型风机,水泵节能MM440矢量型,功能型高精度调速,力矩张力控制等MM410变频器该变频器为“廉价型”,功能较少,价格低。
主要应用于单相,三相电动机地变速驱动,如泵类,风机,广告牌,移动门以和自动化机械地驱动。
功能:线性U/f控制;多点设定地U/f控制;磁通电流控制。
功率范围:0.12~0.75kWMM420变频器该变频器为“通用型”主要应用于三相电动机地变速驱动。
可以用于传送带,材料运输机,泵类,风机与机床地驱动等。
功能:线性U/f控制;多点设定地U/f控制;磁通电流控制(U/f控制地一种),内置PI控制器。
功率范围:0.37~11kW。
MM430变频器该变频器为“风机泵类专用型”,主要应用于风机与水泵地变频调速。
功能:线性U/f控制;多点设定地U/f控制;磁通电流控制,内置PID控制器。
功率范围:7.5~250kW。
该变频器为西门子现行风机泵类主流专用变频器。
MM440变频器该变频器为“通用型”变频器,主要应用于三相电动机地变速驱动,也可以用于泵类,风机等节能负载。
是现行西门子“通用型”主流变频器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MM440变频器如何实现带反馈的矢量控制,它的参数如何设置?
速度矢量控制(MM440)
在矢量控制中,速度控制器影响系统的动态特性。特别是恒转矩负载,速度闭环控制有利于改善系统的运动精度和跟随性能。
在矢量控制过程中,速度控制器的配置是重要的环节。
根据速度控制器的反馈信号来源,可以将速度矢量控制分为带传感器的矢量控制(VC)与无传感器的矢量控制(SLVC)两种。
1.编码器的反馈信号(VC):P1300=20
2.观测器模型的反馈信号(SLVC):P1300=21
在快速调试和电机参数优化的过程中,变频器会根据负载参数自动辨识系统模型,建立模型观测器,在没有传感器的情况下,
系统也会根据输出电流来计算当前速度,作为速度反馈来构成速度闭环。
速度控制器的设定方式(P1460,P1462,P1470,P1472)
1.手动调节
可根据经验对速度控制器的比例与积分参数进行整定
2.PID自整定
设定参数:P1400
当P1400.0=1,使能速度控制器的增益自适应功能,即根据系统偏差的大小来自动调节比例增益系数Kp。在弱磁区,增益系数随
磁通的降低而减小。
当P1400.1=1,速度控制器的积分被冻结,只有比例增益,即对开环运行的电动机加上滑差补偿。
3.优化方式自整定
通过设置P1960=1,变频器会自动对速度控制器的各参数进行整定。
转矩控制(MM440)
矢量控制分为速度矢量控制与转矩矢量控制,转矩控制与速度矢量控制的主要区别是闭环调节是基于转矩物理量进行运算的。
在某些特殊的场合,系统对变频器输出转矩的要求比较严格。因此在MM440变频器中又实现了转矩设置功能。同速度矢量控制
一样,转矩控制也分为无传感器矢量控制和带传感器的矢量控制。
在无传感器的转矩控制过程中,系统根据观测器模型来计算当前频率,与加速度转矩控制输出频率进行预算后,反馈到调制器。
带传感器的转矩控制,将编码器测得的信号与观测器模型进行运算后直接反馈到调制器。
一 速度控制与转矩控制的切换
通过设置P1501=1,或者P1501=722.X来实现速度控制到转矩控制的切换。
二 转矩的设定
通过P1500来选择转矩设定源或者直接在P1503中设定相应转矩值。
三 附加转矩设定值
注:在速度控制与转矩控制中都可以选择转矩作为附加设定值。
为什么使用Drive ES SIMATIC功能块FB42对MM440变频器上载/下载参数时会报错 #1
使用Drive ES SIMATIC功能块FB42(PDAT_UD2)对MM440 FW2.1上载/下载参数到相应的数据块,如果
数据块由Starter中FW2.0x的MM440的参数转换而来,则会出现错误信息。 (button "Convert list to
S7 data block").
这一错误信息由三个参数引起:P1233 (直流制动持续时间), P2151 (CI: 速度设定值监控) and P2152 (CI:
实际速度监控).
MM440 FW2.0x到FW2.1x的参数转换时,这些参数会发生变化。
具体为:
- 参数P1233 的数据类型由无符号16位整数(U16)变为浮点数;
- MM440 FW2.1x中取消了参数 P2151 和 P2152 .
如果从Starter 中FW2.0x MM440 上载/下载完整参数表或用户定义参数表到数据块,或者用户定义参数
表含有上文提到的三个参数中的至少一个,那么FW2.0x的数据块结构不能匹配版本为FW2.1x 的MM440
的参数结构。当上载参数时,驱动数据被写入到错误的数据块存储单元中(如DWORD 写入到 WORD) ,
下载参数时,错误的数据从数据块中读出然后写入到驱动器中。所以使用FB42会报错。
可以通过参数来设置错误发生时FB42的响应,忽略错误信息继续下载操作。 "LOG_FCT“ 的输入设为
"1" ,下载操作启动,当报错时不会终止下载操作,而是记录错误信息、忽略参数P1233, P2151 和P2152
继续下载。DB号,参数号,索引号,故障代码都会记录在日志文件中。这样设置后,只有记录了20条错
误信息之后下载操作才会被中断。
进一步信息,请参考 DRVDPS7, FB42 PDAT_UD2 的S7帮助。
注意:
当带错下载完成后,驱动器需要进行以下设置:
P0010 = 0 // 准备
P0003 = 1/2/3 // 访问等级 1, 2 或 3
必要时,设置P0971 = 1进行从 RAM 到 EEPROM 的数据传输 .
注意:
建议在参数下载完成后,将驱动器中的参数与DB中的进行检查比较。
MM440 变频器矢量控制模式的正确设置与优化
许多用户在用MM440变频器矢量控制模式时不知道如何正确设置与优化,导致许多问题出现如启动时电流大或不能启动,高速
运行时出现F0022故障,低速运行出现反转或冲击现象等.以下列出目前用户做优化的几种不正确方法:
1. 不设任何电机参数,仅修改P1300=20.
2. 按照说明书的快速调试步骤设定马达的名牌参数,控制模式P1300=0, 快速调试后再修改P1300=20.
3. 按照说明书的快速调试步骤设定马达的名牌参数,控制模式P1300=20,当操作面板出现A541或几条横线,用户认为
优化结束.
正确的优化步骤如下:
1. 按照说明书的快速调试步骤设定马达的名牌参数.
2. 在选择控制模式时设定P1300=20
3. 依使用情况设定P1910=1/2/3/4
4. 当操作面板出现A541时,用户必须给出启动命令,等待自动优化(优化时间与变频器功率大小有关)
5. 在无传感器矢量控制模式运行,低频力矩不够,可考虑加提升(P1610,P1611)
6. 如速度响应不够快,可进行速度控制器的优化(P1960)