角度传感器简单应用系统
rvdt角位移传感器原理

rvdt角位移传感器原理RVDT角位移传感器原理RVDT是一种基于电缆传感器技术的角度测量传感器,其全称为“旋转变压器角度传感器”(Rotary Variable Differential Transformer)。
它常常被应用在需要高质量和可靠的角度测量的场合,例如舰船舵角测量、汽车转向功能、太阳能电池板和人造卫星中的太阳面传感器等领域。
RVDT角位移传感器原理的工作基础是在永磁偏转稳定状态下的磁阻原理。
该传感器一般由三个彼此相互垂直的线圈组成,其中,一个作为中央传感线圈而另外两个则用作输入和输出线圈。
当外界的转动产生线圈之间的相对转动时,输出线圈所产生的电压信号将与输入线圈的信号相差一个相位。
RVDT角位移传感器不仅能够测量转角,而且在传输过程中能保证测量数据的准确性和稳定性。
因此,一般常常使用RVDT角位移传感器进行重载和长期测量,特别是在恒温环境和大气压力变化小的情况下,数据的稳定性和准确性表现非常明显。
接下来,我们将从RVDT角位移传感器构造和特点两个方面详细阐述其工作原理:一、RVDT角位移传感器构造1.中央传感线圈:该传感线圈是RVDT角位移传感器的核心,它位于输入和输出线圈的中央,并且与它们相互垂直。
中心传感线圈一般由一组由薄铜制成的长条线圈组成,这些线圈之间的间隔非常小,能够极大的减少由于温度变化引起的线圈扭曲和线圈彼此间的接触。
2.输入和输出线圈:输入和输出线圈是输入和输出信号的来源和收集器。
它们通常位于传感线圈的两侧,并且与中央传感线圈相互垂直。
输入和输出线圈之间的距离和箕斗形状取决于长度和直径比。
3.芯杆:芯杆是整个RVDT角位移传感器系统的基本支撑部分。
它是由一个甚至两个垂直方向的线杆组成的。
其中一个用于支撑传感器线圈,另一个则用于支撑传感器磁芯。
芯杆还起着保持线圈之间间隔恒定和承受机械负载的作用。
4.磁芯:磁芯是整个RVDT角位移传感器中最基本的部分。
它是由一个或两个固定的磁芯组成的,贯穿整个传感器的线圈。
GY-25倾斜角度传感器模块使用手册2
尺寸图: 图2
Pin1
VCC
Pin 2 RX
Pin 3 TX
Pin 4 GND
Pin 5 RST
Pin 6 B0
Pin 7 SCL
Pin 8 SDA
电源+ (3v-5v) 串口数据接收 串口数据发送 电源地 内部使用,不需要连接,悬空 内部使用,不需要连接,悬空 I2C 时钟 I2C 数据
参数 -180°~ 180°
0.01° 1° 1° 100 HZ(115200bps) 3~5 V 15mA -20°~ 85° -40°~ 125° 11.5mm×15.5mm
五、通信协议 串口: (1)、串口通信参数(默认波特率值 115200 bps,)
波特率:9600 bps 校验位:N 数据位:8 波特率:115200 bps 校验位:N 数据位:8
注意:波特率选择可通过 PCB 上焊接点选择(参考图 1)。
停止位:1 停止位:1
(2)、模块输出格式,每帧包含 8 个字节(十六进制):
①.Byte0: 0xAA
帧头标志
②.Byte1: 0x00~0xFF 航向角高 8 位
③.Byte2: 0x00~0xFF 航向角低 8 位
④.Byte3: 0x00~0xFF 俯仰角高 8 位
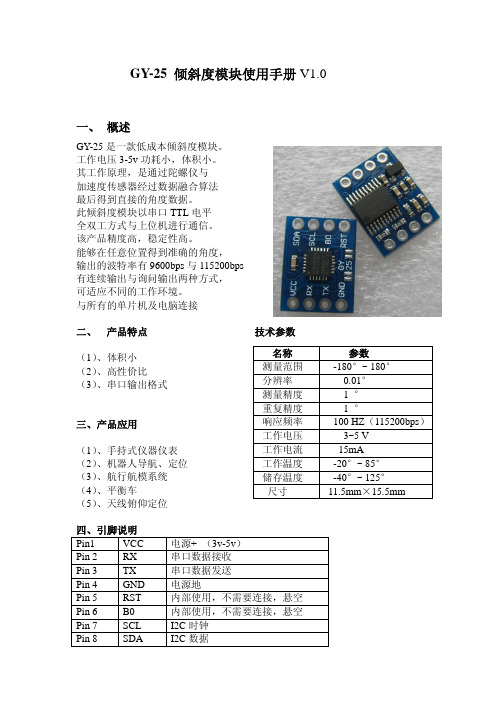
GY-25 倾斜度模块使用手册 V1.0
一、 概述
GY-25 是一款低成本倾斜度模块。 工作电压 3-5v 功耗小,体积小。 其工作原理,是通过陀螺仪与 加速度传感器经过数据融合算法 最后得到直接的角度数据。 此倾斜度模块以串口 TTL 电平 全双工方式与上位机进行通信。 该产品精度高,稳定性高。 能够在任意位置得到准确的角度, 输出的波特率有 9600bps 与 115200bps 有连续输出与询问输出两种方式, 可适应不同的工作环境。 与所有的单片机及电脑连接
Vert-X角度传感器
Vert-X角度传感器Vert-X角度传感器Vert-X角度传感器是一种用于测量物体角度的先进传感器。
它广泛应用于工业自动化、航天航空、机器人技术、汽车电子等领域。
Vert-X角度传感器以其高精度、高稳定性和多功能性而备受赞誉,成为现代科技领域不可或缺的重要组成部分。
Vert-X角度传感器采用了先进的磁致伸缩(MagPOT)技术。
该技术利用磁性传感器结构对磁场变化进行检测,从而精确测量物体的角度。
与传统的机械式角度传感器相比,Vert-X角度传感器具有更高的灵敏度和更长的使用寿命。
Vert-X角度传感器具有多种优点。
首先,它的测量精度非常高,可达到0.01度,能够满足各种高精度应用的需求。
其次,Vert-X角度传感器具有很高的重复性和稳定性,无论在恶劣的环境条件下还是长时间的使用中,都能保持良好的性能。
此外,该传感器还具有抗干扰能力强、反应速度快的特点,能够适应各种复杂的工作环境。
Vert-X角度传感器在工业自动化领域具有广泛的应用。
它可以用于测量机械臂的关节角度,实现精确控制和定位。
在机器人技术中,Vert-X角度传感器可以用于实现机器人的姿态控制和运动规划,提高机器人工作的精度和效率。
此外,在航天航空领域,该传感器可以用于飞行器的导航和姿态稳定控制。
在汽车电子领域,Vert-X角度传感器可以用于车辆悬挂系统、转向系统等部件的精确控制。
除了广泛应用于工业和科技领域外,Vert-X角度传感器还可以在日常生活中发挥重要作用。
例如,在智能家居系统中,可利用Vert-X角度传感器实现智能窗帘、智能灯光等设备的自动控制;在智能手机中,可利用该传感器实现自动调节屏幕亮度、旋转屏幕方向等功能。
此外,Vert-X角度传感器的简单使用和易于集成也是其受欢迎的原因之一。
该传感器采用数字通信接口,如I2C和SPI,与微控制器或计算机连接简单方便。
此外,Vert-X角度传感器还提供多种电源供电方式,包括直流供电和线性稳压供电,以适应不同应用的需求。
角度扭矩传感器标定与检测系统设计

现代电子技术Modern Electronics TechniqueNov. 2023Vol. 46 No. 222023年11月15日第46卷第22期0 引 言随着人们对车辆驾驶舒适性和安全性的考量增多,汽车电动助力系统等车辆辅助系统越来越重要。
汽车电动助力系统(EPS )[1]包括扭矩传感器、助力电机、EPSECU 、角度传感器、车速传感器和减速器等部件,其中扭矩传感器与角度传感器作为EPS 系统中检测驾驶员转向操作的传感器,是系统中关键部分,其性能将对车辆EPS 系统工作产生直接影响。
2003年,D. U. Howard 率先推出了利用巨磁阻效应的角度传感器[2];2014年,海拉推出了一款集成有扭矩检测输出和转角输出的TAS 传感器,在PCB 上设计发送DOI :10.16652/j.issn.1004⁃373x.2023.22.009引用格式:陈佳威,范伟军,潘银斌.角度扭矩传感器标定与检测系统设计[J].现代电子技术,2023,46(22):46⁃52.角度扭矩传感器标定与检测系统设计陈佳威1, 范伟军1, 潘银斌2(1.中国计量大学, 浙江 杭州 310000; 2.瑞立集团瑞安汽车零部件有限公司, 浙江 温州 325000)摘 要: 针对某企业角度扭矩传感器输出性能标定和检测的需求,设计一种角度扭矩传感器标定与检测系统。
该系统能够实现对角度扭矩传感器角度和扭矩信号的标定、自动检测。
采用基于工控机PCI 接口的数据采集控制系统,实现对标定和检测过程数据的实时采集以及对伺服电机的精确控制;采用基于双位置气缸的装载系统,实现对传感器标定对象的自动切换;使用LabVIEW 编程软件完成对传感器标定检测流程实时控制和显示等功能的设计。
在角度扭矩传感器的角度和扭矩完成灵敏度标定后,对其静态输出性能进行检测,得出角度扭矩传感器的非线性误差、迟滞误差等均在允许范围内。
大量重复性试验结果表明,角度的合成标准不确定度为0.072 0°,扭矩的合成标准不确定度为0.041 3 N·m ,说明所设计系统能够满足企业对于角度扭矩传感器性能标定和检测功能的测试要求。
汽车电子底盘控制-GMR角度传感器+TLE5012寄存器设置应用攻略
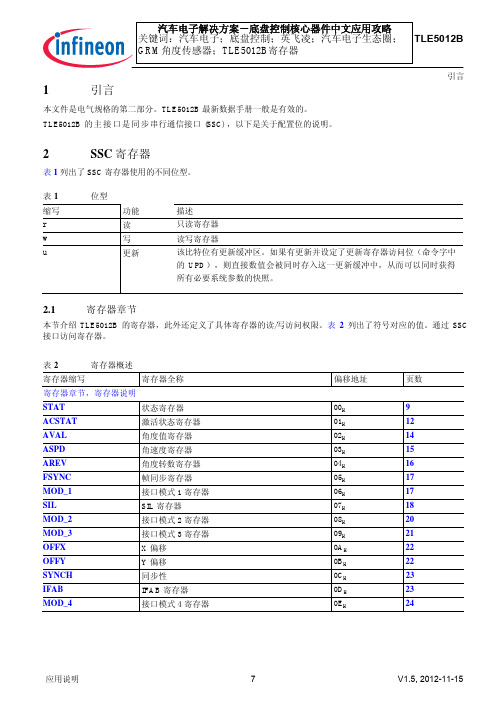
引言1 引言本文件是电气规格的第二部分。
TLE5012B 最新数据手册一般是有效的。
TLE5012B 的主接口是同步串行通信接口 (SSC) ,以下是关于配置位的说明。
2 SSC 寄存器表 1 列出了 SSC 寄存器使用的不同位型。
表 1 位型2.1 寄存器章节本节介绍TLE5012B 的寄存器,此外还定义了具体寄存器的读/写访问权限。
表2 列出了符号对应的值。
通过SSC 接口访问寄存器。
表 2 寄存器概述寄存器章节,寄存器说明表 2 寄存器概述(续)寄存器按字寻址。
配置寄存器校验和为监控传感器配置的完整性,TLE5012B 对 08H 至 0F H 地址范围内的配置寄存器进行循环冗余检查。
8 位 CRC 存储在寄存器 CRC_PAR(地址 0FH)中。
对这些寄存器中的一个或多个寄存器进行修改时,利用TLE5012B 数据手册提供的生成器多项式计算寄存器 08H 至0FH的新校验和,然后将其写入CRC_PAR 寄存器。
否则会发生 CRC 失败错误(状态位 S_FUSE = 1)。
将寄存器 AS_FUSE 设为 0 就可以禁用 CRC 检查。
启用自动校准后,CRC 检查自动禁用,因为自动校准会对数个配置寄存器进行周期性调节。
基于导数的复位:可以通过TLE5012B 所用导数(Exxxx 号)专用的激光引信,设置某些寄存器(例如接口设置)的复位。
本例中,寄存器表中的复位被标志为“基于导数”。
所有导数的具体复位列表参见第 3 章。
工厂校准的复位值:校准寄存器(例如偏移校准)的复位由传感器工厂校准阶段写入的激光引信来设置。
这些值是每个器件专有的。
本例中,寄存器表中的复位被标志为“基于导数”对这些寄存器中的一些进行修改时,应先读取寄存器内容,只修改相关的位,然后再将内容写回寄存器中,以避免意外改写校准值。
多功能寄存器:有些配置寄存器有不止一个任务,可以根据 IFA、IFB、IFC 引脚所选的接口(通过 IF_MD 寄存器,地址 0EH选择)更换不同的设置。
foc 霍尔计算角度

foc 霍尔计算角度摘要:一、背景介绍二、霍尔效应的原理三、霍尔计算角度的应用领域四、霍尔计算角度的优缺点五、结论正文:霍尔计算角度(FOC Hall Angle)是一种基于霍尔效应的磁场测量技术。
霍尔效应是指当电流通过一片半导体材料时,会在材料的一侧产生电势差的现象。
利用这一原理,我们可以通过测量电势差来计算磁场的大小和方向。
霍尔计算角度的原理是利用霍尔效应传感器测量磁场,然后通过计算得出磁场与传感器之间的夹角。
这种方法具有较高的测量精度和较快的响应速度,因此在许多领域都有广泛的应用。
首先,霍尔计算角度在汽车电子领域有广泛应用。
汽车的电动助力转向系统(EPS)需要实时监测方向盘的角度,以调整助力的大小。
霍尔计算角度传感器可以精确地测量方向盘的角度,提高驾驶的舒适性和安全性。
其次,霍尔计算角度在工业自动化领域也有广泛应用。
例如,在机器人手臂的控制系统中,需要实时监测关节的角度,以便精确控制机器人的运动。
霍尔计算角度传感器可以提供高精度的角度测量,提高工业机器人的性能。
此外,霍尔计算角度在航空航天、医疗设备、通信等领域也有广泛应用。
例如,在卫星天线控制系统、医疗成像设备、通信基站等场景中,都需要高精度的磁场测量技术。
霍尔计算角度虽然具有较高的测量精度和较快的响应速度,但同时也存在一定的局限性。
例如,它容易受到环境温度、电源电压等因素的影响,导致测量误差。
此外,霍尔计算角度传感器在某些特殊应用场景中可能不适用,需要结合具体需求进行选择。
总之,霍尔计算角度作为一种基于霍尔效应的磁场测量技术,具有广泛的应用领域和较高的测量精度。
位姿传感器的原理和应用
位姿传感器的原理和应用1. 介绍位姿传感器是一种用于测量物体的位置、方向和姿态的智能设备。
它们可以在不同的应用领域中使用,如工业自动化、航空航天、机器人和虚拟现实等。
位姿传感器通过感知物体的运动和角度变化,将这些信息转化为电子信号,以实现对物体的姿态进行精确测量。
本文将介绍位姿传感器的原理和应用。
2. 位姿传感器的原理位姿传感器使用多种传感器技术来测量物体的位置和角度。
以下是一些常见的位姿传感器原理:2.1 加速度计加速度计是一种可以测量物体线性加速度的传感器。
它通常由微机电系统(MEMS)加速度计构成,其原理基于弹性质量的惯性原理。
当物体发生加速度或减速度时,它会产生惯性力作用在加速度计的质量上。
通过测量该惯性力,加速度计可以计算物体的加速度,并进一步推导出物体的位移和速度。
2.2 陀螺仪陀螺仪是一种测量物体角速度的传感器。
它通常由MEMS陀螺仪构成,其原理基于角动量守恒定律。
当物体发生旋转时,它会产生角动量,陀螺仪可以测量并记录这个角动量,从而计算物体的角速度和角度。
陀螺仪广泛应用于导航系统和姿态控制等领域。
2.3 磁力计磁力计是一种测量物体磁场强度和方向的传感器。
它利用磁敏材料(如磁阻式或霍尔效应)来感知外部磁场,并将磁场信息转化为电信号。
磁力计可用于测量物体的方向和位置,尤其在导航和姿态控制中具有重要的应用。
2.4 视觉传感器视觉传感器是一种测量物体位置和姿态的传感器。
它使用相机和图像处理算法来捕获和分析物体的图像,并计算出物体的位置和方向。
视觉传感器通常具有高精度和高灵活性,广泛应用于机器人导航、虚拟现实和增强现实等领域。
3. 位姿传感器的应用位姿传感器在许多领域中都有广泛的应用。
以下是一些常见的应用示例:3.1 工业自动化位姿传感器可应用于工业自动化系统中,例如机器人装配线、自动化导航和机械臂等。
通过测量物体的姿态和位置,位姿传感器可以帮助实现精确的定位和姿态控制,从而提高生产效率和产品质量。
sca100t角度传感器在角度测量系统中的设计
周姣蒋求生
( 湘潭职业技术学院信息工程系,湖南湘潭41 1 102)
脯要]基于SCAl 00T的角度传感器具有长期稳定性好,温度特性优良,抗冲击能力强等特征,首先简要分析SCAl 00T的主要特点及
其结构,介绍一种用AT89S52开发的基于SCAI ( hOT的角度传感器的系统设计,紧接着详细阐述系统的软件设计思路。
Of f cor r =一Q0000006×T3+00001× r 一00039xT一 0.0522
式中。Of f cor r 为偏移量偏差,T为所测得的当前温度,单位摄氏
度。
计算 所得的Of fc or r 可用于SCAl OOT的偏移量校准,具体公式如
下
190
ቤተ መጻሕፍቲ ባይዱ
OFFSETcomp=Of f s et - Of f cor r 200 9年6 月I 上 }
法攫词】单片机;角度传感器 ;SCAl 00T
在很多情况下,人们想确定物体相对于重力场是处于垂直还是水 平位置。在很多国家,对起重机是有规定的,要求对其进行某种形式的 倾斜监控,特别是对于运输人的设备。离轨车辆需要倾斜度信息以避免 发生事故,或是某些重要部件保持一定的角度。一些车辆,如自倾斜火 车,利用倾斜来补偿离心加速度,倾角仪用来帮助使重力垂直于地面。 光学仪器,如平面激光仪,经常需要处于水平或垂直位置。在许多情况 下, 需要 测量 两个 相互 垂直 方向 的倾 斜度 。
懈si n( 娄s 掣i 生) benaur vr t y 式中:0f f set 为倾斜度为O度时设备的输出值,Sen si t i t i vi t y 是设 备的输 出灵敏 度,对于SCAl OOT—D01为70mV/c,SCAl OOT—D02 为35mV/c ,VD。是SCAl 00 T的测量输出。 1 22 数字输出至角度转换 加速度测量数据用”位数字宇节格式保存在RDAX和RDAY寄 存器中,数据范围为0—2 047 .在酽 ( 水平 放置) 时其额定的输出为
磁角度传感器的工作原理
磁角度传感器的工作原理1. 引言磁角度传感器是一种用于测量物体相对于参考方向的角度的设备。
它利用磁场的性质来确定物体的旋转角度。
本文将详细讨论磁角度传感器的工作原理。
2. 磁场感应原理磁场是由磁性物质产生的一种力场,它具有方向和大小。
根据法拉第电磁感应定律,当一个导体在磁场中运动时,会在导体两端产生感应电动势。
这个原理被广泛应用于磁角度传感器中。
3. 磁角度传感器的基本原理磁角度传感器通常由一个旋转部件和一个固定部件组成。
旋转部件上安装有一个或多个永久磁铁,固定部件上安装有一个或多个磁场传感器。
当旋转部件转动时,永久磁铁会改变其相对位置,从而改变固定部件上的磁场分布。
通过检测这种磁场分布的变化,可以确定旋转部件相对于固定部件的角度。
4. 磁角度传感器的工作原理磁角度传感器的工作原理可以分为以下几个步骤:步骤1:磁场分布建模在传感器的固定部件上,通过测量和建模永久磁铁在旋转部件不同位置时的磁场分布。
这可以通过实验或计算方法来完成。
建立一个数学模型,描述永久磁铁在不同位置时产生的磁场分布。
步骤2:检测磁场变化当旋转部件转动时,永久磁铁的位置相对于固定部件会发生变化。
这将导致固定部件上的磁场分布发生变化。
传感器将检测这种磁场变化,并将其转换为电信号。
步骤3:信号处理传感器输出的电信号需要进行进一步处理,以得到旋转部件相对于固定部件的角度信息。
这个过程通常包括放大、滤波和数字化等步骤。
步骤4:角度计算根据经过处理的电信号,通过一些算法计算出旋转部件相对于固定部件的角度。
根据具体的传感器设计和应用需求,可能会使用不同的算法,如三角函数、插值等。
步骤5:输出结果通过接口将计算得到的角度信息输出给用户。
这可以是模拟信号或数字信号,具体取决于传感器的设计和应用要求。
5. 磁角度传感器的应用磁角度传感器广泛应用于许多领域,包括汽车工业、航空航天、机械制造等。
它们被用于测量转向角度、发动机位置、舵机位置等。
6. 总结磁角度传感器利用磁场感应原理来测量物体相对于参考方向的角度。
角位移传感器的工作原理
角位移传感器的工作原理角位移传感器是一种广泛应用于工业控制和检测领域的传感器,它能够测量物体的角位移并把其转化为电信号输出。
本文将介绍角位移传感器的工作原理及其应用。
一、工作原理角位移传感器使用了多种不同的工作原理,常见的有电阻式、电容式、感应式等。
以下将分别介绍这些原理。
1. 电阻式角位移传感器电阻式角位移传感器的工作原理基于电阻的变化。
当物体发生角位移时,传感器中的电阻会随之发生变化。
一种常见的电阻式传感器是电阻刻度盘传感器,它由一个电阻刻度盘和一个接触式游标组成。
当物体发生角位移时,游标接触刻度盘,使电阻值随之改变。
通过测量电阻值的变化,可以确定角位移大小。
2. 电容式角位移传感器电容式角位移传感器的工作原理基于电容的变化。
当物体发生角位移时,传感器中的电容会发生变化。
电容式传感器通常由一对电极和介质组成,在角位移发生时,电极之间的介质会发生形变,从而改变电容。
通过测量电容的变化,可以确定角位移的大小。
3. 感应式角位移传感器感应式角位移传感器的工作原理是基于感应效应。
当物体发生角位移时,传感器中的线圈和磁场会发生相对运动,从而产生感应电动势。
通过测量感应电动势的变化,可以确定角位移的大小。
二、应用领域角位移传感器广泛应用于各个领域,以下列举几个常见的应用:1. 机械工业角位移传感器在机械工业中被用于测量机械装置的角位移,如机械臂的角度控制、机械转盘的角位移等。
通过监测角位移,可以实现对机械装置的精准控制和监测。
2. 汽车工业角位移传感器在汽车工业中被广泛应用于转向系统、悬挂系统等。
通过监测汽车零部件的角位移,可以实现对转向、悬挂等系统的控制和调整,提高汽车的操控性能和安全性能。
3. 航空航天角位移传感器在航空航天领域中具有重要应用价值。
在航空航天器的飞行控制系统中,角位移传感器被用于测量飞行器各部件的角位移,如舵面的角度、发动机喷口的方向等。
通过监测角位移,可以实现对飞行器的精准控制和姿态调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010年05
期(下
)
角度传感器简单应用系统
叶贞贞
(合肥学院电子信息与电气工程系安徽合肥230061)
【摘要】本设计以C8051F005单片机为控制核心,用单轴倾角传感器SCA60C检测平衡板倾斜角度,
通过对步进电机的
控制达到了控制平衡板旋转角度的目的
。
【关键词】角度传感器;C8051F005单片机;角度预置;步进电机;
显示联动
0.
引言
传感器在现代信息技术中有着举足轻重的地位,传感器
为系统提供进行处理和决策所必需的原始信息,很大程度上
影响和决定着系统的性能,本设计采用以单片机为控制单元
,
用单轴倾角传感器检测平衡板倾斜角度,采取步进电机控制
平衡板角度自动旋转目的
。
1.
硬件电路设计
角度传感器硬件连接图如图1所示,当步进电机带动平
衡板倾斜到使角度传感器SCA60C处于水平位置时,Vo端输
出+0.5V的模拟电压。传感器SCA60C仅可精确检测到
0~90
度的角度范围,当平衡板转到使角度传感器与水平面成90度
的角度时,此时Vo端输出+5V的模拟电压。在0~90度的倾角
范围内,Vo端输出的是正比于倾角大小的+0.5~+5V的模拟电
压信号,当平衡板转动到使角度传感器与水平面间的角度从
90度到180度的范围变化时,输出端Vo输出的是从+5V
依次
变化到+0.5V的模拟电压信号
[1][2]
,
因此通过测定传感器
SCA60C输出端Vo
电压的大小即可确定平衡板与水平面的夹
角
。
图1角度传感器硬件连接图
图2步进电机驱动电路原理图
步进电机驱动电路的设计本系统中,我们选择4相5线
步进电机,其驱动电路主要由L297+L298组成,该驱动电路集
驱动与保护于一体。L297是脉冲分配器,只要步进电机
A、B
、
C、D四项依次连接到J1的1、2、3、4
各点,且将剩下的一条线
接地,L297就会自动的将输入到端口CW/CCW的脉冲分配给
步进电机的各个相序,此时步进电机便可转动
[3][4]
。
控制电机时
只需单片机通过I/O口向L297的cw/ccw和clock端发送控制
信号即可控制它的转速和正反转。驱动电路原理如图
2
。
本系统主要由主控制器模块、角度检测模块、A/D转换模
块、键盘模块和显示器模块等部分组成,系统连接图如图3所
示
:
图3系统框图
图4程序流程图(下转第8页
)
作者简介:叶贞贞(1987.1—),女,汉族,安徽安庆人,就读于合肥学院06级电子信息与电气工程系电子信息工程专业
。
◇高教论述◇
48
2010年05
期(下
)
民和企业建设绿色农业生产基地,开拓绿色食品市场。3.2以实施农业标准化为重点,加大绿色农业标准化体系推广要依托各级农业技术推广部门,在优化生态环境的基础上,大力推广绿色农业生产新技术、新工艺、新品种,用绿色农业的生态意识保护农业生产环境,用绿色农业可持续发展的观点开发利用农业资源,用绿色农产品的生产标准生产现代农产品。农业部门要充分发挥技术优势,结合农业信息网络、农技电波入户、跨世纪青年农民培训“、绿色”证书培训和科技下乡等形式,对广大农民进行绿色农业生产技术规程与质量标准的宣传、培训,提高农业劳动者的绿色生产意识。同时发挥典型示范的推动作用,选择生态环境好、无污染的标准化生产基地,率先向绿色农业转换。3.3注重调研,做好区划“十一五”时期,是湖南绿色农业发展的关键时期,要重点建设一批专业化、规模化和标准化的种养业绿色食品基地。各地要在原有农业资源调查与区划基础上,采用GIS等现代技术手段,与传统方法相结合的方式,继续做好绿色农业资源调查,建立绿色农业资源管理信息库,对农产品原产地自然条件(土壤、大气、水等)进行科学检测,对产地社会经济条件、耕作习惯、区域优势进行调查,在综合分析、科学研究与论证的基础上,确定各地绿色农发展的对策和措施。3.4扶持一批重点产品和龙头企业。要选择一批质量好、市场潜力大、产品特色突出、附加值高的重点产品和项目,从各方面予以扶持,使生产要素向重点产品、重点企业集中,扶持一批骨干龙头企业。扶持龙头企业的关键是要在项目、资金、技术、政策环境等方面给予重点倾斜。在加强示范基地建设的同时,有计划地建设一批高标准
、
高起点、规模大、市场竞争力强的绿色食品原料生产基地,对
基础好、发展潜力大、资源环境有优势的地区优先安排。依托
绿色食品原料生产基地,通过优惠政策扶持,新建或改建一批
大中型绿色食品加工企业,特别是吸引湖南一些名牌企业加
入开发绿色农业的行列
。
3.5
做精品牌,做大市场
。
绿色食品是在优良的产地环境,采用先进的农业技术、先
进的管理方式和先进的装备手段生产出来的产品,其品质是
一流的。因此,必须大力培育绿色优质品牌,靠优质品牌打开
市场,带动产业,增加企业和农民的收入。要坚持质量与发展
并重的原则,加强对“从土地到餐桌”全过程质量控制与管理
,
确保绿色食品的产品质量,维护绿色食品的精品形象。要充分
利用绿色食品的竞争优势,加快绿色产品开发,打造一批绿色
食品品牌,开拓国际市场;要采取措施,鼓励和扶持绿色食品企
业发展成为外向型企业,同时还要引进国外大公司来湖南投
资绿色农业,建立外向型的绿色食品出口创汇基地;可以充分
利用展示展销、物流配送、超市服务、连锁经营、电子交易、网
上销售等现代营销手段,创新营销方式,拓展营销领域,开辟
新的市场
。
【参考文献】
[1]王秋跃,田艳丽.构建“两型”社会背景下绿色农业发展对策探讨[J].
贵州商业高等专科学校学报
,
2008(9).
[2]李祺,刘凌峰.促进湖南生态农业发展建设农业生态文明[J].
农业科
技管理
,2008,(12).
[3]周洁.关于山西绿色农业发展的思考[J].山西农经,2009(1).
[4]唐安来,蔡雪芳,郑斌.大力发展绿色农业[J].当代江西,2008(5).
●
科
●
科
(上接第48页)系统分为两个工作模式,
工作于模式一
时,可通过键盘模块预置一个角度,主控制器接收到此信息后,通过控制电机控制模块来使角度检测模块做出转动动作以使平衡板按输入角度完成倾斜动作。同时,角度传感器输出的模拟量经A/D转换模块转换后送入主控制器,主控制器据此输入判定平衡板是否已倾斜到预置的角度,并据此来控制电机控制模块,并且主控制器模块通过控制显示模块实时的显示平衡板的倾斜角度。通过按键模块可将系统切换到模式二,模式二的功能是能始终保持平衡板的水平,且能使显示模块显示的内容与平衡板联动,两种工作可通过按键来切换。系统使用c8051f00作为控制核心,128*64作为显示器,4*4键盘来输入需要预置的角度。程序具有角度预置和自动寻找平衡点两种模式,根据不同需要选择,具有友好人机界面,操作简单易懂。软件流程图如图4所示:2.系统测试与分析表1系统性能测试系统测试与分析如表1所示,本系统的误差来源主要有两方面:1)装配误差:角度传感器要水平装设在平衡板上,装配时很难保证两者严格的在同一平面上,这会使角度传感器不
能精确地反映平衡板的倾斜角。2)步进电机误差:步进电机动
作是靠不断地输入脉冲来实现的,每输入一个脉冲步进电机
会转动一个固定的角度(0.09度)。若预置β度,则应送给步进
电机的脉冲数为β/0.09个,但这个数值可能不是整数,需要经
取整处理,取整时便引入了误差。另外,步进电机还存在失步
和越步的现象,这也会引入误差
。
3.
结束语
本设计以C8051F005单片机为控制核心,通过把单轴倾
角传感器SCA60C水平的固定在平衡板上,达到了实时检测平
衡板倾斜角度的目的,并通过对步进电机驱动电路的控制实
现了平衡板的转动。系统可实现通过键盘预置倾斜角度、实时
显示角度值、屏幕显示与平衡板倾斜联动和可使平衡板部分
始终保持水平等功能
。
【参考文献】
[1]康华光.电子技术基础:
模拟部分[M].高等教育出版社
,2006.
[2]康华光.电子技术基础:
数字部分[M].高等教育出版社
,2007.
[3]
全国大学生电子设计竞赛组委会,全国大学生电子设计竞赛获奖
作品精选[M].北京理工大学出版社
,2006.
[4]
陈永真.全国大学生电子设计竞赛试题精选[M].电子工业出版社
,
2007.
基本要求测试发挥部分测试
输入角度大小平衡时角度误差起始倾斜角度平衡时角度误差
30°29.07°0.70%14°0°0
65°65.6°0.90%32°0.3°0.90%
94°94.2°0.20%80°0.3°0.38%
110°110.4°0.36%76°0.7°0.92%
176°175.7°0.17121°1.2°0.99%
◇本刊特稿◇
●
8