控制理论基础答案
自动控制原理简答
自动控制原理简答1、简要论述自动控制理论的分类及其研究基础、研究的方法。
自动控制理论分为“经典控制理论”和“现代控制理论”。
“经典控制理论”以递函数为基础,以时域法、根轨迹法、频域法为基本方法,“现代控制理论”以状态空间法为基础,以频率法和根轨迹法为基本方法。
2、在经典控制理论中用来分析系统性能的常用工程方法有那些?分析内容有那些?常用的工程方法:时域分析法、根轨迹法、频率特性法;分析内容:瞬态性能、稳态性能、稳定性。
3、相比较经典控制理论,在现代控制理论中出现了哪些新的概念?系统的运动分析,能控性,能观性,极点配置,观测器设计,跟踪器等。
4、人闭上眼见很难达到预定的目的试从控制系统的角度进行分析。
人闭上眼睛相当于系统断开反馈,没有反馈就不知道偏差有多大,并给予及时修正。
所以人闭上眼睛很难到达预定目标。
5、试分析汽车行驶原理首先,人要用眼睛连续目测预定的行车路线,并将信息输入大脑(给定值),然后与实际测量的行车路线相比较,获得行驶偏差。
通过手来操作方向盘,调节汽车,使其按照预定行车路线行驶。
6、对飞机与轮船运行原理加以分析飞机和轮船在行驶时,都会发射无线电信号来进行定位,无线电信号通过雷达反射到计算机中央处理器中。
进行对比得出误差,再将误差发射,进入雷达反射到飞机和轮船的接收器中,计算机收到信号后可还原为数据,进而可知偏差而及时修正,这是时刻都进行的。
所以飞机,轮船都能保持预定航向行驶。
7、从元件的功能分类,控制元件主要包括哪些类型的元件?控制元件主要包括放大元件、执行元件、测量元件、补偿元件。
8、线性定常系统的传递函数定义传递函数:传递函数是指在零初始条件下,系统输出量的拉式变换与系统输入量的拉式变换之比。
9、常见的建立数学模型的方法有哪几种?各有什么特点?有以下三种:(1机理分析法:机理明确,应用面广,但需要对象特性清晰(2实验测试法:不需要对象特性清晰,只要有输入输出数据即可,但适用面受限(3以上两种方法的结合:通常是机理分析确定结构,实验测试法确定参数,发挥了各自的优点,克服了相应的缺点10、自动控制系统的数学模型有哪些自动控制系统的数学模型有微分方程、传递函数、频率特性、结构图。
电气控制与PLC控制基础理论-第六章

输入
输出
SB1 X1 SB2 X2
红灯L1
Y0
绿灯L2,L3,L4,L5 Y1
黄灯L6,L7,L8,L9 Y2
表6-2 天塔之光控制系统输入/输出端口分配表
天塔之光控制系统设计
2、基于三菱FX2N系列PLC天塔之光控制系统设计 (2)PLC外部接线图设计 PLC外部接线图设计如图6-10所示。
➢ 要考虑电源的输出功率和极性问题。
编制PLC程序并进行模拟调试
编制PLC程序时要注意以下问题: (1)以输出线圈为核心设计梯形图,并画出该线圈的得电条件、失电条件和自锁条件。 (2)如果不能直接使用输入条件逻辑组合成输出线圈的得电和失电条件,则需要使用辅助继电器 建立输出线圈的得电和失电条件。 (3)如果输出线圈的得电和失电条件中需要定时或计数条件时,要注意定时器或计数器得电和失 电条件。 (4)如果输出线圈的得电和失电条件中需要功能指令的执行结果作为条件时,使用功能指令梯级 建立输出线圈的得电和失电条件。 (5)画出各个输出线圈之间的互锁条件。 (6)画保护条件。 根据以上要求绘制好梯形图后,将程序下载到PLC中,通过观察其输出端发光二极管的变化进行模 拟调试,并根据要求进行修改,直到满足系统要求。
图6-16 PLC外部接线图 图6-17 DC24V直流电源接线图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (4)PLC强电电路图 PLC强电电路图如图6-18所示。
图6-18 PLC强电电路图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (5)PLC梯形图设计 PLC梯形图设计如图6-19所示。 (6)指令程序的传输 使用GX Developer(或FXGP/WIN-C)编程软件绘 制图6-19所示的PLC梯形图,并进行转换和PLC程序传 输。也可使用FX-20P型手持式编程器进行程序传输, 方法不再赘述。
现代控制理论基础第二章习题答案
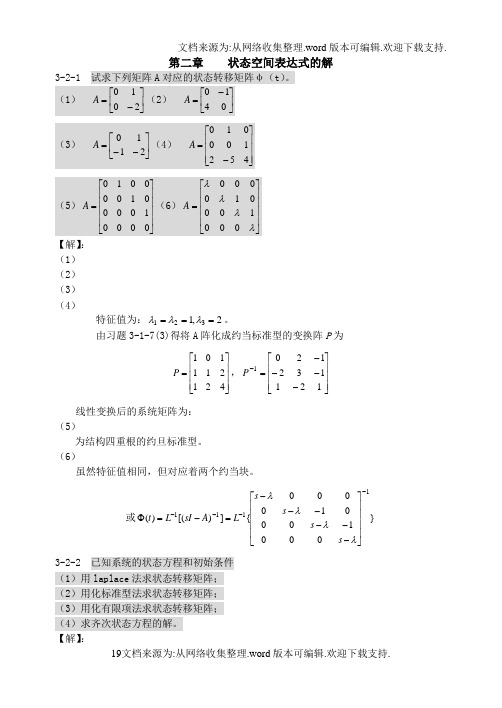
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
控制理论基础第二版部分习题答案

第二章2.1 求解下列微分方程2)dd2yy ddtt2+ddyy ddtt=ee4tt,初始条件yy(0)=2, yy(0)=0.解:首先对微分方程两边进行拉氏变换,得代数方程:ss2YY(ss)−ssyy(0)−yy(0)+ssyy(ss)−yy(0)=1ss−4代入初始条件yy(0)=2, yy(0)=0.ss2YY(ss)−ssyy(ss)=1ss−4+2ss+2YY(ss)=2ss+1ss(ss−4)(ss+1)YY(ss)=2ss+AA ss+BB(ss−4)+CC(ss+1)计算得到A=-0.25,B=0.05,C=0.2;YY(ss)=47ss+15(ss−4)+120(ss+1)拉氏反变换y(t)=1.75+0.05ee4tt+0.2ee−tt(t>0)3)dd2xx ddtt2+5ddxx ddtt+6xx=6,初始条件xx(0)=2,xx(0)=2.解:首先对微分方程两边进行拉氏变换,得代数方程:ss2XX(ss)−ssxx(0)−xx(0)+5ssxx(ss)−5xx(0)+6XX(ss)=6ssXX(ss)=2ss2+12ss+6ss(ss+2)(ss+3)=AA ss+BB ss+2+CC ss+3计算得到A=1,B=5,C=-4,拉氏反变换得到,x(t)=1+5ee−2tt−4ee−3tt(t>0)2.2.一阶微分方程组为4'103'20x yx y y+=−++=,已知(0)0,'(0)0,(0)5x x y===,求解(),()x t y t。
解:首先对微分方程两边进行拉氏变换,得代数方程组:4ssXX(ss)−4xx(0)+YY(ss)=10/s−XX(ss)+(3ss+2)YY(ss)=3yy(0)XX (ss )=15ss +20ss (2ss +1)(6ss +1)YY (ss )=60ss 2+10ss (2ss +1)(6ss +1)得到:XX (ss )=20ss +6.25ss +12�+−26.25ss +16�YY (ss )=10ss +12.5ss +12�+−17.5ss +16�x(t)=20+6.25ee −12�tt-26.25ee −16�tt (t>0)y(t)=10+12.5ee −12�tt-17.5ee −16�tt(t>0)2.3解:根据基尔霍夫定律写出电路方程: 如ii 1为分电流VV =(ii 1+ii 2)RR 1+LL 1dd (ii 1+ii 2)ddtt +ii 1RR 2+1CC 1�ii 1ddtt VV =(ii 1+ii 2)RR 1+LL 1dd (ii 1+ii 2)ddtt +LL 2ddii 2ddtt +1CC 2�ii 2ddttORVV =(ii 1+ii 2)RR 1+LL 1dd (ii 1+ii 2)ddtt +ii 1RR 2+1CC 1�ii 1ddttii 1RR 2+1CC 1�ii 1ddtt =LL 2ddii 2ddtt +1CC 2�ii 2ddtt如ii 1为总电流:VV =ii 1RR 1+LL 1ddii 1ddtt +LL 2ddii 2ddtt +1CC 2�ii 2ddttLL 2ddii 2ddtt+1CC 2∫ii 2ddtt )RR 2+1CC 1∫(ii 1−ii 2)ddtt2.5将滑阀节流扣流量方程Q c x ω=Q 是阀芯位移x v 和节流口压p 的函数,c 、w 分别为流量系数和滑阀面梯度,ρ为油的密度。
自动控制理论基础24(第7章(2))

6
二、自激振荡的稳定性
1、稳定极限环与不稳定极限环 如果在复平面上,-1/N(X)曲线 与 G( j)曲线 相交,则非线性系统的输出可能出现持续振 荡,即极限环。极限环有稳定极限环和不稳 定极限环之分。
例如图示非线性系统:
a点是稳定的自激振荡工 作点,而b点是不稳定的 自激振荡工作点。
Im
线性系统部分为:
X
A
Re
G( j)
K
1 0
j( j2 1)( j 1)
0
15
可由 ImG( j) 0 或 G( j) 解出二
曲线交点所对应的 值,然后将此 代
入 Re G( j) , 或者代入 G( j) ,并令其 等 于-1/N(X),即可解出X。
2
sin
1
1 X
1 X
2
《自动控制理论基础》
第二十四讲
1
7-4 用描述函数法分析非线性系统
一、奈氏稳定判据的应用
非线性系统的典型结构如图所示:
R(s) X N(X ) Y
G(s)
C(s)
由于系统的线性部分具有低通滤波器特性,所
以在系统产生自激振荡时,非线性部分产生的
高次谐波被极大的衰减,则描述函数可以作为
一个实变量或复变量的增益来处理。
(3)在复平面作出-1/N(X)和 G( j)的轨迹;
(4)判断系统是否稳定,是否存在极限环; (注意:假设线性部分为最小相位系统)
(5)如果系统存在极限环,进一步分析极限 环的稳定性,确定它的频率和幅值。
2、例题: 13
例1:非线性系统如图所示,试用描述函数法分析 当K=3时系统的稳定性,并求K的临界稳定值。
机械控制理论基础 董霞 月第 版 习题解答 第 章

《机械控制理论基础》(修订本).董霞等编著.西安交通大学出版社,2005年9月第1版习题解答山东理工大学机械工程学院机电工程系辛世界2016年绪 论复习思考题1. 机械工程控制论的研究对象及任务是什么?解答:机械工程控制论实质上是研究机械工程中广义系统的动力学问题。
具体地说,它研究的是机械工程技术中的广义系统在一定的外界条件(即输入或激励,包括外加控制与外加干扰)作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性(即由系统的结构与参数所决定的特性)所决定的整个动态历程:研究这一系统及其输入、输出三者之间的动态关系。
从系统、输入、输出三者之间的关系出发,根据已知条件与求解问题的不同,机械工程控制论的任务可以分为以下五方面(1)已知系统和输入求系统的输出(响应),并通过输出来研究系统本身的有关问题,即系统分析问题;(2)己知系统和系统的理想输出,设计输入,使输出尽可能符合给定的最佳要求,即最优控制问题;(3)已知输入和理想输出,设计系统,使得输出尽可能符合给定的最佳要求,即最优设计问题;(4)系统的输入和输出已知,求系统的结构与参数,即建立系统的数学模型,即系统辨识问题;(5)系统和输出已知,识别输入或输入中的有关信息,此即滤波与预测问题。
2. 什么是信息及信息的传递?试举例说明。
解答: 信息:凡是能反映被研究对象(包括控制器和被控制对象)的状态和属性的都可以称作信息。
信息传递:是指信息在系统及过程中以某种关系动态地传递,或称转换。
如图1−1所示机床加工工艺系统,将工件尺寸作为信息,通过工艺过程的转换,加工前后工件尺寸分布有所变化,这样,研究机床加工精度问题,可通过运用信息处理的理论和方法来进行。
3. 么是反馈及反馈控制?试列举一个反馈控制的实例。
解答:所谓信息的反馈,就是把一个系统的输出量不断直接地或经过中间变换后全部或部分地返回,再输入(或作用)到系统中去,并对系统的输出发生影响,起到控制的作用,以达到图1−1 工艺过程中信息的传递nn预定的目的。
现代控制理论基础总复习
第二章线性系统的数学描述数学模型可以有许多不同的形式,较常见的有三种:第一种是:把系统的输入量和输出量之间的关系用数学方式表达出来,称之为输入输出描述,或外部描述;第二种是:不仅可以描述系统输入、输出之间的关系,而且还可以描述系统的内部特性,称之为状态空间描述或内部描述;第三种是:用比较直观的方块图(结构图)和信号流图模型进行描述。
910 2.1 线性系统的时域数学模型()(1)(2)121()()()()()n n n n n c t a c t a c t a c t a c t ---+++++()(1)(2)0121()()()()()m m m m m b r t b r t b r t b r t b r t ---=+++++ (2.1) 式中,()r t 和()c t 分别是系统的输入信号和输出信号,()()n c t 为()c t 对时间t 的n 阶导数;i a (1,2,)i n =和j b (0,1,)j m =是由系统的结构参数决定的系数。
2.2 传递函数11m n b s a s --++++++11 式中1011()m m m m M s b s b s b s b --=++++1011()nn n n N s a s a s a s a --=++++()M s 和()N s 分别称为传递函数()G s 的分子多项式和分母多项式。
2.5 线性系统的状态空间描述A Buy C du =+⎧⎨=+⎩x x x(2.3) 2.5.2 状态空间表达式与传递函数的关系1()()G s C sI A B D -=-+(2.4)12 2.5.3 状态空间表达式的建立情形一: 线性微分方程中不含输入的导数项,传递函数没有零点()(1)11n n n n y a y a y a y u --++++= (2.5)情形二 线性微分方程含有输入的导数(不超过3阶),传递函数有零点 ()(1)()(1)11011n n n n n n n n y a y a y a y b u b u b u b u ----++++=++++ (2.6) 1011111()()n n n nn n n nb s b s b s b Y s U s s a s a s a ----++++=++++(2.7)13 Chp.9 状态空间系统响应、可控性与可观性9.1 线性定常系统的响应已知线性定常连续系统状态方程的一般形式为0()()(), (0)t A t B t =+=x x u x x(2.8) 状态变量的初始值为0x ,控制作用为()t u 。
《控制工程理论基础》课后答案
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节 控制系统的增益调整 第五节 控制系统的串联校正 第六节 控制系统的局部反馈校正 第七节 控制系统的顺馈校正第一章 自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节 控制系统的工作原理和基本要求 一、 控制系统举例与结构方框图例1. 一个人工控制的恒温箱,希望的炉水温度为100C °,利用 表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2. 图示为液面高度控制系统原理图。
试画出控制系统方块图 和相应的人工操纵的液面控制系统方块图。
现代控制理论基础_周军_第三章能控性和能观测性
3.1 线性定常系统的能控性线性系统的能控性和能观测性概念是卡尔曼在1960年首先提出来的。
当系统用状态空间描述以后,能控性、能观测性成为线性系统的一个重要结构特性。
这是由于系统需用状态方程和输出方程两个方程来描述输入-输出关系,状态作为被控量,输出量仅是状态的线性组合,于是有“能否找到使任意初态转移到任意终态的控制量”的问题,即能控性问题。
并非所有状态都受输入量的控制,有时只存在使任意初态转移到确定终态而不是任意终态的控制。
还有“能否由测量到的由状态分量线性组合起来的输出量来确定出各状态分量”的问题,即能观测性问题。
并非所有状态分量都可由其线性组合起来的输出测量值来确定。
能控性、能观测性在现代控制系统的分析综合中占有很重要的地位,也是许多最优控制、最优估计问题的解的存在条件,本章主要介绍能控性、能观测性与状态空间结构的关系。
第一节线性定常系统的能控性能控性分为状态能控性、输出能控性(如不特别指明便泛指状态能控性)。
状态能控性问题只与状态方程有关,下面对定常离散系统、定常连续系统分别进行研究(各自又包含单输入与多输入两种情况):一、离散系统的状态可控性引例设单输入离散状态方程为:初始状态为:用递推法可解得状态序列:可看出状态变量只能在+1或-1之间周期变化,不受的控制,不能从初态转移到任意给定的状态,以致影响状态向量也不能在作用下转移成任意给定的状态向量。
系统中只要有一个状态变量不受控制,便称作状态不完全可控,简称不可控。
可控性与系统矩阵及输入矩阵密切相关,是系统的一种固有特性。
下面来进行一般分析。
设单输入离散系统状态方程为:(3-1)式中,为维状态向量;为纯量,且在区间是常数,其幅值不受约束;为维非奇异矩阵,为系统矩阵;为维输入矩阵:表示离散瞬时,为采样周期。
初始状态任意给定,设为;终端状态任意给定,设为,为研究方便,且不失一般性地假定。
单输入离散系统状态可控性定义如下:在有限时间间隔内,存在无约束的阶梯控制信号,,,能使系统从任意初态转移到任意终态,则称系统是状态完全可控的,简称是可控的。
现代控制理论基础复习资料_普通用卷
现代控制理论基础课程一单选题 (共30题,总分值30分 )1. 已知,则该系统是()(1 分)A. 能控不能观的B. 能控能观的C. 不能控能观的D. 不能控不能观的2. 下面关于线性连续定常系统的最小实现说法中( )是不正确的。
(1 分)A. 最小实现的维数是唯一的。
B. 最小实现的方式是不唯的,有无数个。
C. 最小实现的系统是能观且能控的。
D. 最小实现的系统是稳定的。
3. 下面关于连续线性时不变系统的能控性与能观性说法正确的是()(1 分)A. 能控且能观的状态空间描述一定对应着某些传递函数阵的最小实现。
B. 能控性是指存在受限控制使系统由任意初态转移到零状态的能力。
C. 能观性表征的是状态反映输出的能力。
D. 对控制输入的确定性扰动影响线性系统的能控性,不影响能观性。
4. 下面关于线性非奇异变换说法错误的是()(1 分)A. 非奇异变换阵P是同一个线性空间两组不同基之间的过渡矩阵。
B. 对于线性定常系统,线性非奇异变换不改变系统的特征值。
C. 对于线性定常系统,线性非奇异变换不改变系统的传递函数。
D. 对于线性定常系统,线性非奇异变换不改变系统的状态空间描述。
5. 线性定常系统的状态转移矩阵,其逆是()(1 分)A.B.C.D.6. 下面关于系统Lyapunov稳定性说法正确的是()(1 分)A. 系统Lyapunov稳定性是针对平衡点的,只要一个平衡点稳定,其他平衡点也稳定。
B. 通过克拉索夫斯基法一定可以构造出稳定系统的Lyapunov函数。
C. Lyapunov第二法只可以判定一般系统的稳定性,判定线性系统稳定性,只可以采用Lyapunov方程。
D. 线性系统Lyapunov局部稳定等价于全局稳定性。
7. 线性SISO定常系统,输出渐近稳定的充要条件是()(1 分)A. 其不可简约的传递函数的全部极点位于s的左半平面。
B. 矩阵A的特征值均具有负实部。
C. 其不可简约的传递函数的全部极点位于s的右半平面。