理力答案_第四章
人教版八年级物理《第四章物态变化》知识点+习题(含答案)打印版
第四章 物态变化一、温度1、 定义:温度表示物体的冷热程度。
2、 单位:① 国际单位制中采用热力学温度。
② 常用单位是摄氏度(℃) 规定:在一个标准大气压下冰水混合物的温度为0度,沸水的温度为100度,它们之间分成100等份,每一等份叫1摄氏度 某地气温-3℃读做:零下3摄氏度或负3摄氏度 ③ 换算关系T=t + 273K3、测量——温度计(常用液体温度计)① 温度计构造:下有玻璃泡,里盛水银、煤油、酒精等液体;内有粗细均匀的细玻璃管,在外面的玻璃管上均匀地刻有刻度。
② 温度计的原理:利用液体的热胀冷缩进行工作。
③ 分类及比较: ④ 常用温度计的使用方法:使用前:观察它的量程,判断是否适合待测物体的温度;并认清温度计的分度值,以便准确读数。
使用时:温度计的玻璃泡全部浸入被测液体中,不要碰到容器底或容器壁;温度计玻璃泡浸入被测液体中稍候一会儿,待温度计的示数稳定后再读数;读数时玻璃泡要继续留在被测液体中,视线与温度计中液柱的上表面相平。
◇温度计的玻璃泡要做大目的是:温度变化相同时,体积变化大,上面的玻璃管做细的目的是:液体体积变化相同时液柱变化大,两项措施的共同目的是:读数准确。
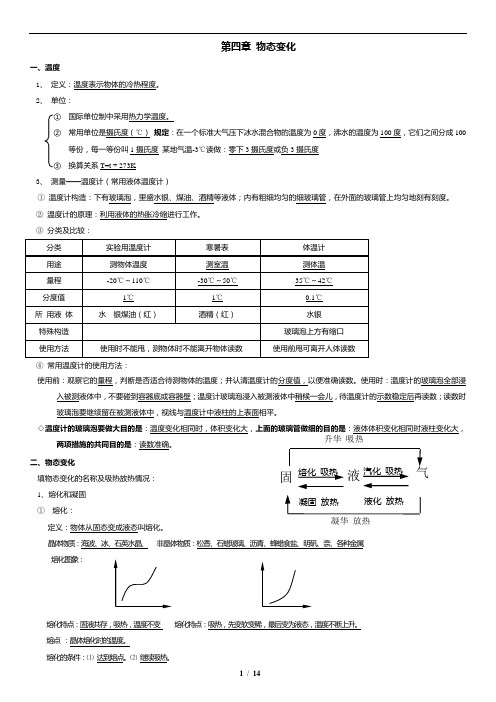
二、物态变化填物态变化的名称及吸热放热情况: 1、熔化和凝固 ① 熔化:定义:物体从固态变成液态叫熔化。
晶体物质:海波、冰、石英水晶、 非晶体物质:松香、石蜡玻璃、沥青、蜂蜡食盐、明矾、奈、各种金属 熔化图象:熔化特点:固液共存,吸热,温度不变 熔化特点:吸热,先变软变稀,最后变为液态,温度不断上升。
熔点 :晶体熔化时的温度。
熔化的条件:⑴ 达到熔点。
⑵ 继续吸热。
② 凝固 :定义 :物质从液态变成固态 叫凝固。
固液升华 吸热 凝华 放热凝固图象:凝固特点:固液共存,放热,温度不变 凝固特点:放热,逐渐变稠、变黏、变硬、最后成固体,温度不断降低。
凝固点 :晶体凝固时的温度。
同种物质的熔点、凝固点相同。
凝固的条件:⑴ 达到凝固点。
经济学原理第四章课后题答案

第四章供给与需求的市场力量复习题:1、什么是市场竞争?简单描述除了完全竞争市场之外的市场类型。
答:竞争市场是有许多买者与卖者,以至于每个人对市场价格的影响都微乎其微的市场。
除了完全竞争市场之外,还有垄断市场。
在这个市场上只有一个卖者,他决定价格。
这个卖者被称为垄断者。
还有寡头市场,在这个市场上有几个并不总是主动竞争的卖者,他们提供相似或相同的产品。
通常情况下,寡头们会尽力联合起来,防止剧烈的竞争,收取较高的市场价格。
还有垄断竞争市场,这是一个有许多提供相似但不相同产品的企业的市场结构。
由于各自提供的产品不同,每个企业对产品的价格有一定的影响力。
2、什么因素决定买者对一种物品的需求量?答:物品的价格、买者的收入、相关物品的价格、买者的嗜好、预期决定买者对一种物品的需求量。
3、什么是需求表和需求曲线?它们如何相关联?为什么需求曲线向右下方倾斜?答:需求表是表示一种物品价格与需求量之间关系的表格,需求曲线是表示一种物品价格与需求量之间关系的图形。
需求曲线将需求表用图形的形式表现出来,需求表是需求曲线上假设干个点的坐标的数字表格排列。
需求曲线向右下方倾斜是因为在其他条件不变的情况下,随着价格上升,需求量会减少。
4.消费者嗜好的变化引起了沿着需求曲线的变动,还是需求曲线的移动?价格的变化引起了沿着需求曲线的变动,还是需求曲线的移动?答:消费者嗜好的变化引起了需求曲线的移动,价格的变化引起了沿着需求曲线的变动。
5、波匹的收入减少了,结果他买了更多的菠菜。
菠菜是低档物品还是正常物品?波匹菠菜的需求曲线是什么样的?答:菠菜对波匹来说是低档物品。
因为波匹的收入减少了,他对菠菜的需求量反而增大。
波匹菠菜的需求曲线是向右下方倾斜的。
6、什么因素决定了卖者对一种物品的供给量?答:价格、投入价格、技术、预期决定了卖者对一种物品的供给量。
7、什么是供给表和供给曲线?它们如何相关联?为什么供给曲线向右上方倾斜?答:供给表是表示一种物品价格与供给量之间关系的表格,供给曲线是表示一种物品价格与供给量之间关系的图形。
大学物理学课后习题4第四章答案
k
m1g x1
1.0 103 9.8 4.9 102
0.2
N m1
而 t 0 时, x0 1.0 102 m,v0 5.0 102 m s-1 ( 设向上为正)
又
k m
0.2 8 103
5,即T
2
1.26s
A
x02
(
v0
)2
(1.0 102 )2 (5.0 102 )2 5
(7)两列波叠加产生干涉现象必须满足的条件
是
,
和
。
[答案:频率相同,振动方向相同,在相遇点的位相差恒定。]
4.3 质量为10 103 kg 的小球与轻弹簧组成的系统,按
x 0.1cos(8t 2 ) (SI) 的规律作谐振动,求: 3
(1)振动的周期、振幅和初位相及速度与加速度的最大值; (2)最大的回复力、振动能量、平均动能和平均势能,在哪些位置上动能与 势能相等?
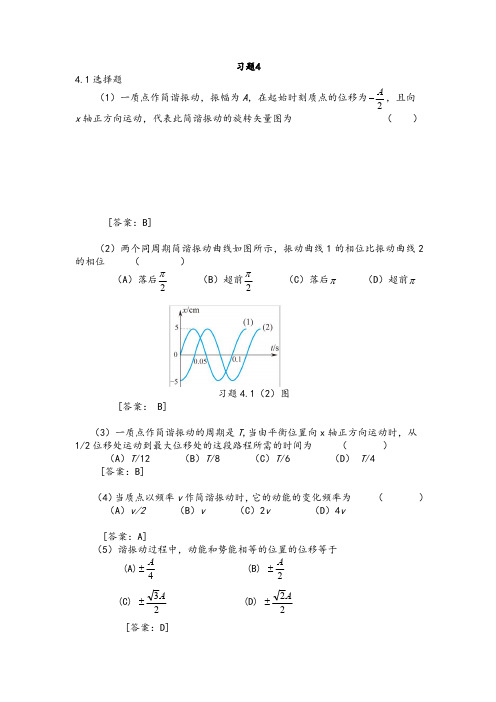
习题 4.2(2) 图 [答案:b、f; a、e]
(3)一质点沿 x 轴作简谐振动,振动范围的中心点为 x 轴的原点,已知周 期为 T,振幅为 A。
( a ) 若 t=0 时 质 点 过 x=0 处 且 朝 x 轴 正 方 向 运 动 , 则 振 动 方 程 为 x=___________________。
[答案: 2 s ] 3
(2)一水平弹簧简谐振子的振动曲线如题 4.2(2)图所示。振子在位移为零, 速度为-A、加速度为零和弹性力为零的状态,对应于曲线上的____________ 点。振子处在位移的绝对值为 A、速度为零、加速度为-2A 和弹性力为-KA 的 状态,则对应曲线上的____________点。
103
(
)2
大学物理学课后习题4第四章答案
[答案:D]
4.2 填空题 (1)一质点在 X 轴上作简谐振动,振幅 A=4cm,周期 T=2s,其平衡位置
取作坐标原点。若 t=0 时质点第一次通过 x=-2cm 处且向 x 轴负方向运动,则 质点第二次通过 x=-2cm 处的时刻为__ __s。
(3) t2 5s 与 t1 1s 两个时刻的位相差;
解:(1)设谐振动的标准方程为 x Acos(t 0 ) ,相比较厚则有:
A 0.1m,
8 ,T
2
1 4
s,
0
2
/3
又
vm A 0.8 m s1 2.51 m s1
am 2 A 63.2 m s2
(2)
Fm mam 0.63N
(1) x0 A ;
(2)过平衡位置向正向运动; (3)过 x A 处向负向运动;
2
(4)过 x A 处向正向运动. 2
试求出相应的初位相,并写出振动方程.
解:因为
v
x0 A cos0 0 Asin
0
将以上初值条件代入上式,使两式同时成立之值即为该条件下的初位相.故有
1
x Acos( 2 t ) T
103
(
)2
0.17
4.2
103
N
2
方向指向坐标原点,即沿 x 轴负向.
(2)由题知, t 0 时,0 0 ,
t t时
x0
A ,且v 2
0, 故 t
3
∴
t
3
/
2
2s 3
化工原理答案传热

第四章 传热热传导【4-1】有一加热器,为了减少热损失,在加热器的平壁外表面,包一层热导率为0.16W/(m·℃)、厚度为300mm 的绝热材料。
已测得绝热层外表面温度为30℃,另测得距加热器平壁外表面250mm 处的温度为75℃,如习题4-1附图所示。
试求加热器平壁外表面温度。
解 2375℃, 30℃t t ==计算加热器平壁外表面温度1t ,./()W m λ=⋅016℃ (1757530025005016016)t --= ..145025********t =⨯+=℃ 【4-2】有一冷藏室,其保冷壁是由30mm 厚的软木做成的。
软木的热导率λ=0.043 W/(m·℃)。
若外表面温度为28℃,内表面温度为3℃,试计算单位表面积的冷量损失。
解 已知.(),.123℃, 28℃, =0043/℃ 003t t W m b m λ==⋅=,则单位表面积的冷量损失为【4-3】用平板法测定材料的热导率,平板状材料的一侧用电热器加热,另一侧用冷水冷却,同时在板的两侧均用热电偶测量其表面温度。
若所测固体的表面积为0.02m 2,材料的厚度为0.02m 。
现测得电流表的读数为2.8A ,伏特计的读数为140V ,两侧温度分别为280℃和100℃,试计算该材料的热导率。
解 根据已知做图热传导的热量 .28140392Q I V W =⋅=⨯=.().()12392002002280100Qb A t t λ⨯==-- 【4-4】燃烧炉的平壁由下列三层材料构成:耐火砖层,热导率λ=1.05W/(m·℃),厚度230b mm =;绝热砖层,热导率λ=0.151W/(m·℃);普通砖层,热导率λ=0.93W/(m·℃)。
耐火砖层内侧壁面温度为1000℃,绝热砖的耐热温度为940℃,普通砖的耐热温度为130℃。
(1) 根据砖的耐热温度确定砖与砖接触面的温度,然后计算绝热砖层厚度。
物理化学第四章课后答案完整版

第四章多组分系统热力学4.1有溶剂A与溶质B形成一定组成的溶液。
此溶液中B的浓度为c B,质量摩尔浓度为b B,此溶液的密度为。
以M A,M B分别代表溶剂和溶质的摩尔质量,若溶液的组成用B的摩尔分数x B表示时,试导出x B与c B,x B与b B之间的关系。
解:根据各组成表示的定义4.2D-果糖溶于水(A)中形成的某溶液,质量分数,此溶液在20℃时的密度。
求:此溶液中D-果糖的(1)摩尔分数;(2)浓度;(3)质量摩尔浓度。
解:质量分数的定义为4.3在25℃,1 kg水(A)中溶有醋酸(B),当醋酸的质量摩尔浓度b B介于和之间时,溶液的总体积求:(1) 把水(A )和醋酸(B )的偏摩尔体积分别表示成b B 的函数关系。
(2)时水和醋酸的偏摩尔体积。
解:根据定义当时4.4 60℃时甲醇的饱和蒸气压是84.4 kPa ,乙醇的饱和蒸气压是47.0 kPa 。
二者可形成理想液态混合物。
若混合物的组成为二者的质量分数各50 %,求60℃时此混合物的平衡蒸气组成,以摩尔分数表示。
解:甲醇的摩尔分数为58980049465004232500423250....x B =+=4.5 80℃时纯苯的蒸气压为100 kPa ,纯甲苯的蒸气压为38.7 kPa 。
两液体可形成理想液态混合物。
若有苯-甲苯的气-液平衡混合物,80℃时气相中苯的摩尔分数,求液相的组成。
解:4.6在18℃,气体压力101.352 kPa下,1 dm3的水中能溶解O2 0.045 g,能溶解N2 0.02 g。
现将1 dm3被202.65 kPa空气所饱和了的水溶液加热至沸腾,赶出所溶解的O2和N2,并干燥之,求此干燥气体在101.325 kPa,18℃下的体积及其组成。
设空气为理想气体混合物。
其组成体积分数为:,解:显然问题的关键是求出O2和N2的亨利常数。
4.7 20℃下HCl 溶于苯中达平衡,气相中HCl 的分压为101.325 kPa 时,溶液中HCl 的摩尔分数为0.0425。
人教版八年级年级物理上册第四章经典例题4.1光的直线传播专项训练含答案
人教版八年级年级物理第四章经典例题4.1光的直线传播专项训练含答案一、单选题1.野外生存能力是户外运动者的必备技能。
下列生存技能与物理知识相对应的是()A.影长辨向﹣光的折射现象B.削竹为刀﹣减面积增压力C.融冰取水﹣固体升华现象D.钻木取火﹣做功改变内能2.设光在真空中的传播速度为v1,在水中的传播速度为v2,在普通玻璃中的传播速度为v3,则它们之间的大小关系是()A.v1<v2<v3B.v1>v2=v3C.v1>v2>v3D.v1=v2=v33.2020年6月21日下午,包括郴州在内的很多地区都能观察到罕见的天文现象﹣﹣日食。
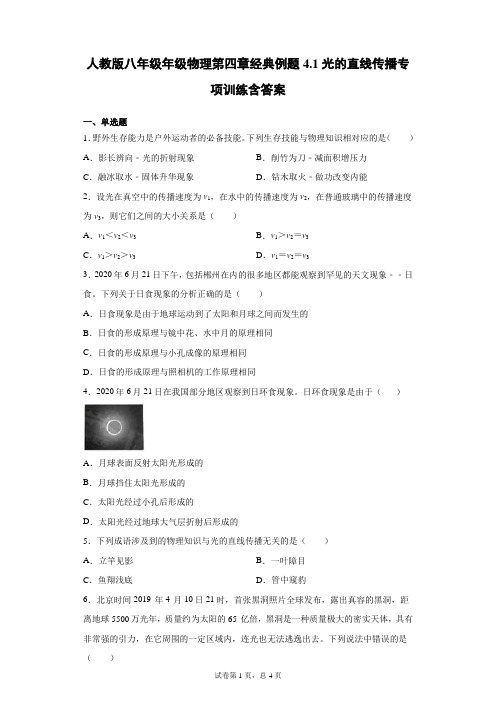
下列关于日食现象的分析正确的是()A.日食现象是由于地球运动到了太阳和月球之间而发生的B.日食的形成原理与镜中花、水中月的原理相同C.日食的形成原理与小孔成像的原理相同D.日食的形成原理与照相机的工作原理相同4.2020年6月21日在我国部分地区观察到日环食现象。
日环食现象是由于()A.月球表面反射太阳光形成的B.月球挡住太阳光形成的C.太阳光经过小孔后形成的D.太阳光经过地球大气层折射后形成的5.下列成语涉及到的物理知识与光的直线传播无关的是()A.立竿见影B.一叶障目C.鱼翔浅底D.管中窥豹6.北京时间2019 年4 月10日21时,首张黑洞照片全球发布,露出真容的黑洞,距离地球5500万光年,质量约为太阳的65 亿倍,黑洞是一种质量极大的密实天体,具有非常强的引力,在它周围的一定区域内,连光也无法逃逸出去。
下列说法中错误的是()A.光年是长度单位B.黑洞的密度非常大C.黑洞强大的引力是分子间的引力D.人眼无法直接看见黑洞内部二、填空题7.在模拟日食、月食的实验中,王老师画了图示。
如果地球上观察到日食,这些人应该是位于__________(选填“甲”或“乙”)处,此时月亮在__________处(选填“A”、“B”或“C”)。
8.为了探究树荫下光斑的成因,小明设计了开有菱形状孔(边长约为5cm)的卡片甲正对太阳光如图,并用另一张卡片乙紧贴在甲上沿箭头方向水平移动,观察距卡片50cm 且与甲平行放置的光屏上光斑的变化情况,发现光斑开始是菱形的,然后逐渐变小,但形状与孔一样,亮度______(填“变亮”、“变暗”或“不变”)。
生理第四章血液循环试题及答案
生理第四章血液循环试题及答案第四章血液循环二、填空题1、内分泌2、缩短,舒张期缩短3、等容收缩期,快速射血期,减慢射血期4、关闭,关闭5、关闭,关闭+-1.心脏除了有循环功能外,还有____________功能。
2.心率减慢时,心动周期_____________,其中以_________更为明显。
3.心室收缩期包括_____________,___________和____________。
4.等容收缩期时,房室瓣处在___________状态,半月瓣处在___________状态。
5.等容舒张期时,房室瓣处于___________状态,半月瓣处于___________状态。
三、单项选择题(a型题)1.e2.b3.b4.b5.e1.心动周期中,占到时间最久的就是()a.心房收缩期b.等容收缩期c.等容舒张期d.射血期e.充盈期2.心动周期中,心室血液的蓄积主要依赖于()a.心房收缩的挤压作用b.心室舒张时造成负压的“抽吸”作用c.胸内负压促进静脉血回心d.血液依赖地心引力而回流e.骨骼肌的挤压作用促进静脉血回心3.在一次心动周期中,左心室压力增高速度最快的就是()a.心房收缩期b.等容收缩期c.快速射血期d.减慢射血期e.等容舒张期4.在一次心动周期中,室内甩最低的时期就是()a.等容收缩期b.快速射血期c.减慢射血期d.等容舒张期e.快速充盈期5.心动周期中,心室容积最小就是()a.等容舒张期末b.快速充盈期末c.快速射血期末d.减慢充盈期e.心房收缩期末四、多项选择题(x型题)1.ac2.abc3.bd4.cd5.acd1.等容收缩期的特点就是()a.心室容积不发生改变b.心室内压下降速度最快c.房室瓣膜和半月瓣都关闭d.心室内甩低于动脉压e.心房内压低于心室内压2.左心室泵血时()a.心室肌的收缩和舒张是造成室内压力变化的原因b.压力梯度是推动血液在腔室之间流动的主要动力c.瓣膜的活动可以掌控血流方向d.瓣膜的活动与室内甩的变化毫无关系e.心室容积不出现发生改变3.心房和心室在心脏泵血活动中的作用()a.房室压力梯度的构成主要源自心房膨胀b.心室等容舒张期内,室内压力大幅度上升c.心房收缩对于心室充盈起主要作用d.心房收缩进入心室的血量约占心室充盈总量的30%e.房室压力梯度的形成主要来自心房舒张4.关于搏出量正确的叙述有()a.等同于每分输出量与心率的乘积b.左心室大于右心室c.指一次眩晕一侧心室射向的血量d.正常人安静时为60-80mle.5~6l/min5.关于心音正确的叙述有()a.第一心音出现在心缩期,持续时间较长b.第二心音出现在心舒期,持续时间较长c.第一心音产生标志着心室收缩开始d.第二心音产生标志着心室舒张开始e.第一心音调高、持续时间长五、是非题(恰当的填上“t”,错误的填上“f”)1.t2.t3.f4.t5.t()1.血液循环的主要功能就是顺利完成体内的物质运输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解:为求 ,首先解除A处约束,并建立如图(a)所示的力和虚位移图。由虚位移原理
于是
KN·m
4-19均质杆AB的长为l,重为P,搁置在宽为a的槽内,如图所示。设A、D处光滑接触,试求平衡位置的 角,并讨论其平衡的稳定性。
解:建立如图所示的坐标系,以杆为研究对象,约束是理想的,主动力只有重力,系统的势能为:
由约束知:
(1)
主动力的虚功为:
(2)
将(8在曲柄OA上作用力矩为M=6 的力偶。OA=150mm,OO1=200mm,O1B=500mm,BC=780mm,略去摩擦及自重。当OA⊥OO1时(如图所示),为了使机构处于平衡,求作用在滑块C上的水平力P。
解:
如图,OA杆速度为 ,其中
所以:
(1)
CB杆的速度瞬心为E点, , ,所以:
(2)
利用虚位移原理可得:
将(1)、(2)代入,得:
由 的任意性,可得:
4-15平台钢架由一个 形框架带中间铰 构成。框架的上端刚性地插在混凝土墙内,下端则搁在圆柱滚动支座上。求当 和 两力作用时,插入端A处的铅直反作用力。
解:欲求 端铅直方向力,解除 端铅直方向约束,代之以约束力 ,则 只能上下平动, 和 点的虚位移大小相同 ,方向可知沿铅直方向, 点虚位移方向沿水平方向,由此可以确定 的速度瞬心即为 的折角处点 。可以求出 作用点D的虚位移 满足:
将(2)式代入,并由 可得:
4-6两等长杆AB与BC在B点用铰链接,又在杆的D和E两点连一弹簧,如图所示。弹簧系数为k,当距离AC等于a时,弹簧的拉力为零。如在C点作用一水平力F,杆系处于平衡。设AB=l,BD=b,杆重及摩擦略去不计,求距离AC之值。
解:解除弹簧DE的约束,代之以约束反力 和 。
因为当AC等于a时,弹簧的拉力为零,从而当AC等于 时,弹簧弹力:
解:如图所示,以A为原点建立坐标系。则D点坐标:
对上式进行变分可得:
(1)
此时弹簧的弹力为:
(2)
以杆AB、滑套D和杆CD为研究对象,约束为理想约束。将弹簧去除,代之以作用在D和B上的弹簧力。弹簧力在 上所做的虚功为零,在 上做的虚功为 ,利用虚位移原理有:
(3)
将(1)式代入得:
由 的任意性可得:
以EF中点为坐标原点建立坐标系,则有
则有:
因为系统质系平衡,由虚位移原理有:
由此解得:
4-14已知AD=DB=6m,CD=3m,在节点D的载荷为P,各杆自重不计。试用虚位原理求图示桁架中杆3的内力。
解:将杆3解除,并代之以相应的内力S。这样,结构ACD可以绕A点定轴转动,CB做平面运动,B、C、D点的虚位移如图所示。根据运动学中定轴转动的知识可知:
对BC杆,有 ,其中 , ,
由以上式子可得
则A点的虚位移rA与滑块C的虚位移rC的关系同速度之间的关系,即
由虚位移原理 ,代入rA与rC的关系
得P = 125N.
4-9两相同的均质杆,长度均为l,质量均匀为m,其上作用力偶如图。试求在平衡状态时,杆与水平线之间的夹角 , 。
解:假设上面杆的质心为A点,下面质心为B点。
于是
4-2图示机构的在C处铰接,在D点上作用水平力P,已知AC=BC=EC=FC=DE=DF=l,求保持机构平衡的力Q的值。
解:建立如图所示的坐标系,由几何关系得:
,
由虚位移原理得:
所以:
4-4反平行四边形机构 中的杆 和 用铰链 和 互相连接,同时又用铰链 和 连在机架 上。在杆 的铰链 处作用着水平力 。在铰链 沿垂直于杆 的方向作用有力 ,机构在图示位置处于平衡。设 , , , 。求 的大小。
而 ,平衡时有:
代入 可得:
答:
4-17图示三铰拱的自重不计,求在水平力P作用下支座A和B的约束反力。
解:解除B点Y方向上的约束,假设B点Y方向上的力为 ,有:
所以:
根据力平衡原理有:
然后解除C点的约束,假设A点X和Y方向的力为 和 。对C点,根据力矩平衡,可以得到:
所以:
再根据X方向上的力平衡,可以得到:
所以:
4-18图示组合梁上作用有载荷P1=5kN,P2=4kN,P3=3kN,以及M=2kN·m的力偶。不计摩擦及梁的质量。试用虚位移原理求固定端A的约束反力偶之矩MA。
解:如图所示,重力 , , 的坐标分别为 , , 。
易知
, ,
由几何关系有
变分得
解得
主动力 的虚功为0,即
带入 便得
4-12图示平面平衡系统,在列其整体的平衡方程时,不需计入弹簧内力;而用虚位移原理求力F1和F2之间的关系时,必需计入弹簧的虚功,二者矛盾吗?简要说明理由。
解:这二者并不矛盾。
在列其整体的平衡方程时,弹簧力是属于内力,不计入平衡方程。
解:根据题意,选三根杆组成的整体为研究对象,约束均为理想约束,主动力为 。质系平衡,则由虚位移原理,有
又由运动学知识,
其中 是沿CB杆方向的分量。
联立上述两式可得,
4-5滑套D套在光滑直杆AB上,并带动CD杆在铅垂滑道上滑动,如图所示。已知当 时,弹簧等于原长,且弹簧系数为5kN/m。若系统的自重不计,求在任意位置 角平衡时,在AB杆上应加多大力偶矩M。
虚位移原理求力F1和F2之间的关系时,弹簧力是主动力,必须计入。
4-13长度均为l的轻棒四根,由光滑铰链联成一菱形ABCD;AB、AD两边支于同一水平线的两个钉E,F上,相距为2a,BD间用一细绳连接,C点作用一铅直力P,如图所示。设A点的顶角为2 ,试用虚功原理求绳中张力T。
解:根据题意,以四根杆组成的整体为研究对象,约束为理想约束,主动力为 。
假设 不动, 有一个小的转角 ,
那么 ,那么两根杆所做的功为
而力偶所做的功为:
而根据虚位移原理,
现假设 不动, 有一个小的转角 ,
那么 , ,两根杆所做的功为
而力偶所做的功为:
而根据虚位移原理,
4-10三均质细杆以铰链相联,其A端和B端另以铰链联接在固定水平直线AB上,如图所示。已知各杆的重量与其长度成正比,AC=a,CD=DB=2a,AB=3a。设铰链为理想约束,求杆系平衡时 和 间的关系。
4-1图示为一轧纸钳,其尺寸如图所示。工作时上、下钳口保持平行,设手握力为P,求作用于纸片上的力Q的大小。
解:
1)取整个轧纸钳为研究对象。
2)系统约束为理想约束。
3)主动力P和Q分别作用在B点和A点。
4)取A点和B点的无穷小真实位移为虚位移 和 。
5)建立虚位移和的关系。由几何关系得
6)主动力的虚功为
由虚功原理列方程可得:
解得: 为插入端A铅直反作用力。
4-16试用虚位原理求图标桁架1、2两杆的内力。
解:如左图去掉1杆,代以作用力F,设F点虚位移为(方向向下),则点E,G,H的虚位移分别为 ,
由虚位移原理有 可得 ;
如右图,分析机构左半部分。设E点虚位移为(方向向下),则点G的虚位移为 ,由虚位移原理有 可得 ;