3D模型的加权特征点曲率球面调和表达
3d建模技术点

3d建模技术点
1.几何建模: 通过点和线构建物体的几何形状,这是最常见的三维建模方法之一,通常用于简单的三维动画制作。
2扫描建模:通过使用激光扫描仪、三维相机或其它传感器来捕捉物体的形状和纹理,然后将它们转化为三维模型。
这种方法可以快速地获取真实世界的中的物体和场景。
3.分形建模:这是一种基于数学算法的建模方法,通过将简单的规则重复应用来生成复杂的三维形状。
分形建模通常被用于创建虚拟现实和游戏中的环境。
4.参数化建模:通过定义一组参数来生成三维模型,这些参数可以控制模型的的大小、形状和位置等。
这种方法通常被用于工程设计和建筑建模。
5.实体建模:通过定义一组实体来构建三维模型,这些实体包括点、线、面、体等。
实体建模通常被用于工程设计和制造,因为它可以提供精确的尺寸和几何信息
6.复合建模:将多个三维模型组合在一起以创建复杂的三维场景或物体。
这种方法通常被用于电影制作、游戏开发和虚拟现实。
三维模型的基础知识点总结

三维模型的基础知识点总结1. 三维模型的分类根据表示方法的不同,三维模型可以被分为多种类型。
常见的三维模型分类包括:1.1 点云模型点云模型是由大量离散的点构成的模型,每个点可以包含坐标和颜色信息。
点云模型通常用来表示复杂的物体表面,如云朵、火焰等。
它的优点是能够准确地描述物体的表面形状,但缺点是不能够表示物体的内部结构。
1.2 多边形网格模型多边形网格模型是由大量的平面多边形构成的模型,其中最常见的形式是三角形和四边形。
多边形网格模型通常用来表示复杂的物体表面,如建筑物、自然景物等。
它的优点是能够高效地表示复杂的几何形状,但缺点是无法准确地表示曲面和球面。
1.3 曲面模型曲面模型是由一些曲线和曲面构成的模型,它通常用来表示光滑的物体表面,如汽车、飞机等。
曲面模型的优点是能够准确地表示光滑的曲面,但缺点是计算和显示复杂度较高。
1.4 固体模型固体模型是由实体和空洞构成的模型,它包含体素和网格两种表示方式。
固体模型通常用来表示物体的内部结构和体积,如器官、机械零件等。
固体模型的优点是能够准确地表示物体的内部结构,但缺点是计算和显示复杂度较高。
2. 三维模型的表示方法2.1 参数化表示参数化表示是指使用数学方程或参数来描述三维模型的表示方法。
常见的参数化表示包括曲线方程、曲面方程和体素方程。
参数化表示的优点是能够准确地描述物体的形状和结构,但缺点是计算和显示复杂度较高。
2.2 多边形表示多边形表示是指使用多边形网格来描述三维模型的表示方法,常见的多边形表示包括三角形网格和四边形网格。
多边形表示的优点是能够高效地表示复杂的几何形状,但缺点是无法准确地表示曲面和球面。
2.3 体素表示体素表示是指使用立方体单元来描述三维模型的表示方法,常见的体素表示包括正交体素和六面体体素。
体素表示的优点是能够准确地描述物体的内部结构和体积,但缺点是计算和显示复杂度较高。
3. 三维模型的建模技术三维模型的建模技术是指使用计算机辅助设计软件来创建和编辑三维模型的技术。
三维模型专业名词
三维模型专业名词
三维模型是一个重要的领域,在计算机图形学、虚拟现实和增强现实等领域中都有广泛的应用。
三维模型通常是一个由三角形面、棱和纹理组成的几何图形,可以用来表示一个物体或一个场景。
三维模型的相关术语包括:
1.面:三维模型由面构成,每个面都是一个三角形。
2.棱:三维模型的棱是连接两个面之间的线段。
3.纹理:三维模型表面的纹理可以用来贴图,从而使模型更加真实。
4.顶点:三维模型由无数个顶点组成,每个顶点是一个点的位置。
5.边:三维模型的边是连接两个顶点之间的线段。
6.面ID:每个面都有一个唯一的ID,可以用来标识它。
7.父节点:在树状结构中,父节点是一个面,它负责引用它的子面。
8.纹理坐标:纹理在三维模型中的位置由纹理坐标确定,它是一个三元组,由x、y和z坐标组成。
9.渲染:在计算机图形学中,渲染是指将三维模型显示为二维图像的过程。
三维模型还有许多其他的术语,如视图、投影和相机等。
视图是三维模型在平面上的投影,相机指定了如何看待三维模型,而投影则确定了如何将三维模型映射到平面屏幕上。
总结起来,三维模型是一个非常重要的概念,它是计算机图形学和虚拟现实技术的重要组成部分。
掌握三维模型的相关术语,可以更好地理解和使用这些技术。
3D打印技术中常见的建模方法

3D打印技术中常见的建模方法在如今快速发展的3D打印技术领域,建模方法是实现设计想法和创建物体的关键步骤之一。
建模方法决定了模型的准确度、复杂度和制作过程中所需的时间和资源。
以下将介绍几种常见的3D打印建模方法。
1. 多边形建模多边形建模是一种广泛应用于3D打印的建模方法,也被称为表面建模。
它通过创建由许多平面多边形组成的模型的方式来实现。
这些多边形可以是三角形、四边形或由更多边构成。
多边形建模技术被广泛应用于电影、游戏和工业设计等领域。
它具有较低的数据存储需求和较高的模型细节控制,同时也易于渲染和修改。
2. 曲面建模曲面建模是一种基于数学曲线和曲面的建模方法,用于创建平滑的曲面模型。
相较于多边形建模,曲面建模可以提供更加真实、光滑和精细的模型表面。
它适用于需要高度精确度和真实性的设计领域,如汽车、飞机和工业零件的设计。
然而,曲面建模技术的计算和修改相对较复杂,需要更高的计算资源和专业知识。
3. 参数化建模参数化建模是一种基于数学和物理的建模方法,通过定义和控制参数来创建模型。
这种建模方法允许设计师在创建过程中进行参数调整和实时修改,从而更好地满足设计需求。
例如,可以通过改变模型中的某些参数来改变其大小、形状或功能。
参数化建模在可定制化、设计优化和工艺优化方面具有很大的潜力,被广泛应用于工程、医学和产品设计等领域。
4. 数字雕塑数字雕塑是一种仿真手工雕塑的建模方法,通过计算机软件和硬件设备模拟雕塑创作的过程。
设计师可以使用3D软件和专用的输入设备,如触摸屏或笔式绘图板,直接在计算机上以类似于传统雕塑创作的方式进行建模。
数字雕塑方法灵活、直观且能够快速实现高度自由曲线和细节的表达,这使得它成为特效制作、艺术创作和个性化设计等领域的理想选择。
5. CAD建模计算机辅助设计(CAD)是一种通用的建模方法,广泛应用于各个领域。
CAD 建模基于二维绘图和三维模型的创建,可以通过几何元素、操作命令和参数化控制等手段来构建模型。
三维表征方法

三维表征方法
三维表征方法是指将三维对象或场景表示为一个数字模型的过程。
三维表征方法可以分为以下几类:
1.几何模型:几何模型是三维对象或场景的几何形状的表示。
几何模型可以用
点、线、面等基本几何元素来表示,也可以用曲面、曲线等更复杂的几何元素来表示。
2.拓扑模型:拓扑模型是三维对象或场景的拓扑关系的表示。
拓扑模型可以用
图论来表示,也可以用其他的拓扑结构来表示。
3.属性模型:属性模型是三维对象或场景的属性信息的表示。
属性信息可以包
括颜色、材质、纹理等。
三维表征方法的选择取决于应用的具体需求。
例如,如果需要对三维对象进行渲染或动画处理,则需要使用几何模型。
如果需要对三维对象进行计算,则需要使用拓扑模型或属性模型。
以下是一些常用的三维表征方法:
1.点云模型:点云模型是用点来表示三维对象或场景。
点云模型可以用激光扫
描或摄影测量等技术来获取。
2.网格模型:网格模型是用网格来表示三维对象或场景。
网格模型可以用建模
软件来创建。
3.曲面模型:曲面模型是用曲面来表示三维对象或场景。
曲面模型可以用建模
软件或三维扫描软件来创建。
4.体素模型:体素模型是用体素来表示三维对象或场景。
体素模型可以用三维
扫描软件或建模软件来创建。
权威3DMAX NURBS曲线和曲面教程
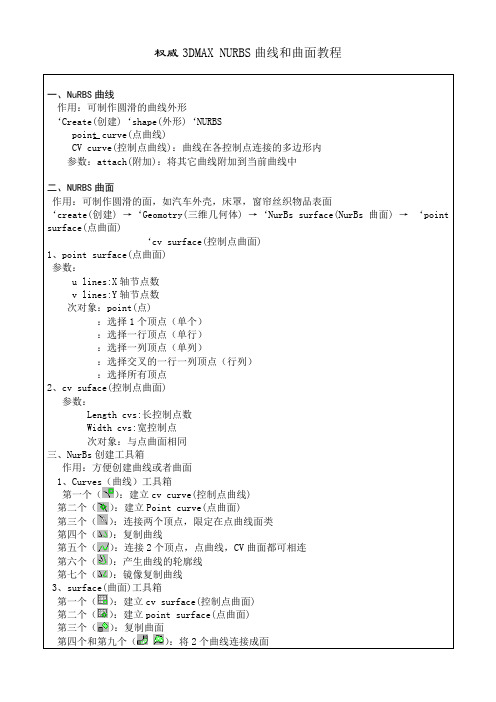
权威3DMAX NURBS曲线和曲面教程一、NuRBS曲线作用:可制作圆滑的曲线外形‘Create(创建)‘shape(外形)‘NURBSpoint curve(点曲线)CV curve(控制点曲线):曲线在各控制点连接的多边形内参数:attach(附加):将其它曲线附加到当前曲线中二、NURBS曲面作用:可制作圆滑的面,如汽车外壳,床罩,窗帘丝织物品表面‘create(创建) →‘Geomotry(三维几何体) →‘NurBs surface(NurBs曲面) →‘point surface(点曲面)‘cv surface(控制点曲面)1、point surface(点曲面)参数:u lines:X轴节点数v lines:Y轴节点数次对象:point(点):选择1个顶点(单个):选择一行顶点(单行):选择一列顶点(单列):选择交叉的一行一列顶点(行列):选择所有顶点2、cv suface(控制点曲面)参数:Length cvs:长控制点数Width cvs:宽控制点次对象:与点曲面相同三、NurBs创建工具箱作用:方便创建曲线或者曲面1、Curves(曲线)工具箱第一个():建立cv curve(控制点曲线)第二个():建立Point curve(点曲面)第三个():连接两个顶点,限定在点曲线面类第四个():复制曲线第五个():连接2个顶点,点曲线,CV曲面都可相连第六个():产生曲线的轮廓线第七个():镜像复制曲线3、surface(曲面)工具箱第一个():建立cv surface(控制点曲面)第二个():建立point surface(点曲面)第三个():复制曲面第四个和第九个():将2个曲线连接成面第五个():复制曲面,不能分开第六个():镜向复制曲面第七个():将曲面拉伸成面第八个():将曲线旋转成面3DMAX 第十五讲(材质1)一、材质编辑器作用:赋于物体材质,表现出各种实际效果1、主窗口组成①样本窗②水平工具栏③垂直工具栏④材质名称类型⑤参数展示栏2、样本窗显示方式选择某样本球’→‘5╳3或‘6╳43、垂直工具栏①样本类型:以何种方式显示样本②背光:显示/隐藏样本球暗区光线③背景:检查透明材质效果④重复:检查透明材质效果⑤视频颜色检查:检查材质颜色以适应电视输出⑥材质动画预览⑦选项:设置材质,相关参数⑧按材质选择物体4、水平工具栏(1)获取材质(包括复合标准材质)(2)将冷材质重新赋予场景中的物体(3)将材质赋予场景中被选择的物体(4)清除材质(5)热材质变为冷材质(6)保存材质备以后使用(8)材质效果通道,给材质起编号(9)显示场景中物体的贴图(10)显示最后结果(11)回到父层级(12)到同一层次(13)材质/贴图导航器二、同步材质,异步材质1、同步材质称为热材质,当改变材质参数,场景中的物体材质会同步变化,样本球4个角为白三角形2、异步材质称为冷材质,当改变材质参数,场景中的物体材质不随之变化三、给物体贴图选择物体→(材质编辑器按钮)→选择一个样本球→diffuse(散播颜色) →‘(贴图按钮)→“Bitmap(位图) →选择某图片→‘打开→‘(显示贴图按钮)。
高级建模技术3DMAX中的NURBS曲线和曲面

高级建模技术3DMAX中的NURBS曲线和曲面高级建模技术:3DMAX中的NURBS曲线和曲面在现代三维建模技术中,NURBS(Non-Uniform Rational B-Spline)曲线和曲面是一种广泛使用的工具。
NURBS曲线和曲面通过调整控制点的位置和权重,可以创造出高度灵活和精确的几何形状。
本文将介绍3DMAX软件中的NURBS曲线和曲面的基本原理以及其在高级建模技术中的应用。
一、NURBS曲线基本原理NURBS曲线是一种数学表示方法,它通过控制点和权重来定义曲线的形状。
NURBS曲线的关键点是其非均匀性,即控制点的权重可以不均匀地影响曲线的形变。
在3DMAX中,创建NURBS曲线的过程十分简单。
首先,我们需要选择NURBS曲线工具,然后在视口中点击鼠标进行控制点的创建。
通过调整控制点的位置和权重,我们可以实现曲线的形状调整和曲率控制。
NURBS曲线的优势在于它可以创建复杂的曲线形状,并且保持曲线的平滑性。
同时,NURBS曲线也支持曲率插值,可以通过调整权重点的位置,使得曲线在不同区域的曲率变化得到更精确的控制。
二、NURBS曲面基本原理NURBS曲面是由多个NURBS曲线组成的平滑表面。
和NURBS曲线一样,NURBS曲面的形状也可以通过调整控制点的位置和权重来进行自定义。
在3DMAX中,创造NURBS曲面同样简单。
我们可以选择NURBS曲面工具,然后在视口中点击鼠标以创建控制点网格。
通过拖动控制点,我们可以调整曲面的形状和曲率。
与其他类型的曲面表示方法相比,NURBS曲面的优势在于它可以创造出高度精确的几何形状,并且支持细节的调整和优化。
同时,NURBS曲面也可以通过调整控制点的权重和插值方式,实现曲面的纹理映射和顶点法线的调整。
三、NURBS曲线和曲面在高级建模技术中的应用NURBS曲线和曲面在高级建模技术中有着广泛的应用。
首先,NURBS曲线和曲面可以用于创造各种形状的物体,如汽车车身、船舶外壳、飞机机身等。
三维特征的计算与应用
三维特征的计算与应用三维特征是指在三维空间中描述物体的特征,通常包括形状、纹理、颜色等信息。
计算三维特征是通过对三维模型或点云数据进行分析和处理得到的,而应用三维特征则是在计算机视觉、计算机图形学、虚拟现实等领域中对物体进行识别、分类、检测等任务的重要手段。
一、三维特征的计算方法1.形状特征计算:形状特征是三维物体的几何属性,常用的计算方法包括体素表示、法向量计算、表面曲率估计等。
其中,体素表示将三维物体的表面划分为小块体素,并统计每个体素的分布和几何属性,以获得物体的形状特征。
法向量计算则是通过计算每个点的法向量,来描述物体的曲面形状。
表面曲率估计是通过计算每个点的曲率,来描述物体的曲面形状。
2.纹理特征计算:纹理特征是三维物体表面的细微纹理变化信息,常用的计算方法包括局部二值模式(LBP)、尺度不变特征变换(SIFT)等。
其中,LBP是一种基于像素灰度差异的纹理特征描述方法,通过统计局部像素灰度的二值模式,来表示纹理特征。
SIFT则是一种基于尺度空间的特征描述方法,通过提取关键点的局部特征,来表示纹理特征。
3.颜色特征计算:颜色特征是三维物体表面的颜色信息,常用的计算方法包括直方图、颜色矩等。
其中,直方图将颜色空间划分为离散的颜色区间,并统计每个区间内的像素数目,以获得颜色特征。
颜色矩则是通过计算像素的均值、方差等统计量,来描述颜色特征。
二、三维特征的应用领域1.三维物体识别:三维物体识别是指根据三维特征对物体进行分类、识别的任务。
通过计算物体的三维特征,并使用机器学习算法进行训练,可以实现对物体的自动识别和分类。
三维物体识别在工业自动化、智能机器人等领域具有广泛的应用前景。
2.三维物体检测:三维物体检测是指根据三维特征对物体进行边界框标定的任务。
通过计算物体的三维特征,并使用目标检测算法进行训练,可以在三维场景中实现对物体的快速定位和检测。
三维物体检测在自动驾驶、安防监控等领域具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
引言
目前随着三维扫描设备和交互建模工作的快速发展, 使
将此向量作为 3D 模型的特征描述符。通过计算此特征描述 符与模型库中的其他模型的特征向量的欧式距离, 来实现检 索的目的。 使用球函数对 3D 模型进行特征提取, 关键是要找到合适 的球函数, 最广泛的做法是从模型的质心向外发射射线 [2], 取 该射线与模型最远处的交点, 计算该交点与质心的距离, 作为 球函数的值。得到该函数后, 进行球面调和变换, 进而提取基 函数的系数作为模型的特征向量。这种做法提取了模型的全 局特征, 而忽略了模型的局部特征, 因此对局部有微小差别或 局部相似单整体有很大区别的模型, 无法达到很好的检索效 果。这两种情况如图 1 和图 2 所示。
Computer Engineering and Applications 计算机工程与应用
2011, 47 (5)
21
3D 模型的加权特征点曲率球面调和表达
杜卓明, 耿国华 DU Zhuoming, GENG Guohua
西北大学 信息科学与技术学院 可视化技术研究所, 西安 710127 Institute of Visualization Technology, School of Information Science & Technology, Northwest University, Xi’ an 710127, China DU Zhuoming, GENG Guohua.Spherical harmonic representation of weighted feature points curvature for 3D model. Computer Engineering and Applications, 2011, 47 (5) : 21-23. Abstract: This paper uses product of maximum distance of feature points and curvature feature points to define the function of the corresponding ball of 3D model.Global features are used to define the function of the corresponding ball of 3D model for weighted value of local features.Then, spherical harmonic transform is used on the sphere.The energy of the coefficients of spherical harmonics forms the feature descriptions which are used for search.Experimental results show that using this method has a good search result. Key words:3D model retrieval; harmonic function; curvature; feature descriptor 摘 要: 利用特征点最远距离与特征点曲率的乘积对 3D 模型定义了对应的球函数, 使用全局特征对局部特征的加权值定义了
杜卓明, 耿国华: 3D 模型的加权特征点曲率球面调和表达
0.7 0.6 查准率( / %) 0.5 0.4 0.3 0.2 0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 查全率( / %) 本文使用方法 最大距离调和方法
x
O
离进行匹配。
要求 M 点的曲率,MM ′ = Ds ,M 与 M ′ 两点的切线的夹 角为 Dα , 则 | Dα/Ds | 成为 MM ′ 的平均曲率。点 M 的曲率为 M ′ 无限逼近 M 的极限值, 即 | | || Dα || || Dα || 为点 M 的曲率, 即 K = | dα | K = Dlim K = Dlim s ® 0| Ds | s ® 0| Ds | | dS | γ(t) = ( x(t) y(t)) 来表示, 如果一条曲线由参数方程: 则该
绘模型, 但是 n 很大时, 会导致复杂度提高, 计算量变大。
4
局部特征提取
反映特征点局部特征的最好、 最直观的方法就是该点的
曲率, 因此在寻找球谐函数的函数值的时候不仅考虑了距离 的全局特征, 而且加入了曲率的局部特征, 将两者的乘积作为 球谐函数的函数值。提取全局特征的方法与原有的方法相 同。首先对模型进行预处理, 即对模型进行旋转、 平移、 放缩, 使得模型的质心与单位球的球心重合。然后由质心向外发射 射线与模型相交, 最远的交点到质心的距离作为模型的全局 特征, 此最远的交点也就成了模型的一个特征点。 计算特征点的方法有两种, 第一种是直接空间中点的曲 率 [3], 即高斯曲率; 第二种是将空间中的点投影到 2D 平面上, 然后根据其相邻的点计算其曲率。第一种方法对特征点的曲 率的描述非常直接, 而且能够最好地描述其局部特征, 但是这 种方法太复杂, 不适合进行大规模的计算。 采用第二种方法, 即先将模型投影到单位球的赤道平面 上, 然后求出特征点的曲率。
pi + 1 。
转, 使其统一到同一方向和尺度且质心与单位球的球心重 合。从质心向外发射射线, 与 3D 模型相交, 取最远的相交点 到质心的距离, 作为 3D 模型在此点的整体特征。该点在球坐 标 的 表 示 为 :(r sin θ cos φ r sin θ sin φ r cos θ) 。 θ Î [0 π] ,
2
球面谐函数在 3D 模型特征提取中的应用及其缺点
球函数应用于 3D 模型检索是 Vranic 等人首先在文献 [1]
中提出的。目前有很多关于球函数用于 3D 模型的特征提取 的研究, 这些研究的主要观点是将 3D 模型投影到球面上, 然 后根据投影后的几何特征构造球函数, 再对此函数进行球面 调和分析, 即展开为一组基函数的线性级数。其基函数的系 数构成了一个向量, 这个向量反映了 3D 模型的几何特征, 顾
22
2011, 47 (5)
Computer Engineering and Applications 计算机工程与应用
| x′ | | x″ y′ | | y″ |
3
K=
(1)
( x ′ 2 + y ′ 2) 2
一个小弧段可以用二次多项式近似, 这样 γ(t) = ( x(t) y(t)) 可以定义为:
y
M0
求解以上两方程组可得: x -x x +x a1 = i + 1 i - 1 a 2 = i + 1 i - 1 - xi 2 2 yi + 1 - yi - 1 yi + 1 + yi - 1 b1 = b2 = - yi 2 2 a2 , b1 , b 2 四点的值, 根据 a1 , 根据式 (2) , 便可以计算出 pi 点 的曲率。
ìb 2 - b1 + b0 = yi - 1 ï íb0 = xi ï îb 2 + b1 + b0 = xi + 1
(2)
标 为 (sin θ cos φ sin θ sin φ cos θ) 。 具 体 的 实 现 方 法 为 :
xij = (sin θi cos φ j sin θi sin φ j cos θi) , θ = (2i + 1)π/2n , φ = (2jπ)/n , i j = 0 1 n , n 的取值越大, 采样点越密集, 可以更好地描
x(t) = a 2 t 2 + a1t + a0 y(t) = b 2 t 2 + b1t + b0
图2 局部相似图
t Î [- 1 1]
3
整体特征的提取
首先对 3D 模型进行预处理, 即对其进行缩放、 平移和旋
当 t = - 1 时, 定义点 pi - 1 ,t = 0 时表示点 pi ,t = 1 时定义点
图 1 整体相似图
图 1 反映了整体相似, 但是局部有区别的情况, 图 2 反映 了局部相似, 但是整体有区别的情况。以上两种情况说明了 局部特征的重要性, 也说明了本文所研究的必要性。
基金项目: 国家自然科学基金重点项目 (the Key National Natural Science Foundation of China under Grant No.60736008) ; 国家自然科学基金 (the National Natural Science Foundation of China under Grant No.60873094) 。 作者简介: 杜卓明 (1980—) , 男, 博士生, 研究方向: 计算机图形学, 模式识别, 最优化理论; 耿国华 (1955—) , 女, 教授, 博士生导师, 研究方向: 模式 识别, 图像处理, 数据库原理。E-mail: Duzhuoming423dzm@ 收稿日期: 2010-11-18; 修回日期: 2011-01-10
5
球面调和函数的建立
利用以上方法找到 3D 模型的整体特征点, 再计算出该点
的曲率, 以及该点到质心的距离, 利用距离和曲率的乘积构造 调和函数[5]:f (θ φ) = d*K 。该函数的散度为 0 , 即: Ñ 2 f=0 。 用球面坐标表示为:
¶2 f 2 ¶f ö ¶ (sin θ ¶f ) + 1 ¶æ 1 1 =0 çr ÷+ 2 2 r ¶r è ¶r ø r 2 sin θ ¶θ ¶θ r sin θ ¶φ2
φ Î [0 2π] 。由于是单位球, 所以只用 r = 1 , 因此每点的坐
由式 (1) 可得在 pi 点的曲率为: 2(a1b 2 - a 2 b1) K= 3 (a12 + b12) 2 将 t = - 1 0 1 , 分别带入弧段的参数方程得到: ìa 2 - a1 + a0 = xi - 1 ï ía0 = xi ï îa 2 + a1 + a0 = xi + 1