DCS课程设计 水箱液位串级控制解析
双容水箱液位流量串级控制系统设计
双容水箱液位流量串级控制系统设计一、系统结构1.水箱:系统中最重要的元件之一,用于存储和供应水资源。
2.控制阀:用于调节水箱出口的流量,根据传感器检测到的液位信号来控制阀门的开度。
3.液位传感器:用于检测水箱内部的液位变化,并将其转换为电信号供控制系统使用。
4.流量传感器:用于检测水箱出口的流量,并将其转换为电信号供控制系统使用。
5.控制器:整个系统的核心部分,根据传感器采集到的液位和流量信号,通过控制阀门的开度来调节水箱的液位和流量。
二、系统设计1.控制策略的选择:双容水箱液位流量串级控制系统的控制策略一般选择PID控制算法。
PID控制器可根据传感器采集到的控制量和设定值之间的误差来调节阀门的开度,实现液位和流量的闭环控制。
2.系统参数的确定:首先需要确定水箱的容积和液位范围,以便合理地选择传感器的量程。
然后需要根据水箱的工作条件和流量要求来确定控制阀的参数,如最大流量、最小可调节流量等。
3.传感器的选择与安装:根据系统的要求和工作环境的特点,选择适合的液位传感器和流量传感器,并将其正确安装在水箱中。
液位传感器一般安装在水箱的顶部,流量传感器安装在水箱的出口处。
4.控制器的设计与配置:根据系统需求和控制策略的选择,选择适合的PID控制器,并按照系统参数进行配置。
控制器应具备良好的控制性能和稳定性,能够根据传感器采集到的信号及时调节阀门的开度。
5.控制策略的调整与优化:系统设计完成后,需要通过实际的试验和调整来优化控制策略,提高系统的控制性能。
可以通过调整PID控制器的参数来实现系统的稳定运行和准确控制。
6.故障检测与保护措施:在设计系统时,应考虑到可能发生的故障,如传感器故障、控制阀失效等,并设计相应的故障检测和保护措施,以确保系统的安全可靠运行。
三、系统应用总结:双容水箱液位流量串级控制系统是一种重要的控制系统,在工业生产中起到关键作用。
其设计需要根据实际需求和系统参数进行合理设置,并通过优化控制策略来实现系统的稳定运行和优质控制效果。
实验方案:水箱液位串级控制系统

过程控制综合实验报告实验名称:水箱液位串级控制系统专业:班级:姓名:学号:实验方案一、实验名称:水箱液位串级控制系统二、串级控制系统的概述1、图5-1是串级控制系统的方框图。
该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
图5-1 串级控制系统方框图R-主参数的给定值;C1-被控的主参数;C2-副参数;f1(t)-作用在主对象上的扰动;f2(t)-作用在副对象上的扰动。
2、串级控制系统的特点串级控制系统及其副回路对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
(1).改善了过程的动态特性;(2).能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力;(3).提高了系统的鲁棒性;(4).具有一定的自适应能力。
3、主、副调节器控制规律的选择在串级控制系统中,主、副调节器所起的作用是不同的。
主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。
由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。
4、主、副调节器正、反作用方式的选择正如单回路控制系统设计中所述,要使一个过程控制系统能正常工作,系统必须采用负反馈。
对于串级控制系统来说,主、副调节器的正、反作用方式的选择原则是使整个系统构成负反馈系统,即其主通道各环节放大系数极性乘积必须为正值。
各环节的放大系数极性是这样规定的:当测量值增加,调节器的输出也增加,则调节器的放大系数K c为负(即正作用调节器),反之,K c为正(即反作用调节器);本装置所用电动调节阀的放大系数K v恒为正;当过程的输入增大时,即调节器开大,其输出也增大,则过程的放大系数K0为正,反之K0为负。
基于DCS的双容水箱液位串级控制
配置 ; 算法 组态用 来 规划控 制方 案 的组织 和基本 构成 ;
上位机 图形 组 态则 是 利 用 MAC S系 统 生 成 应用 系统
所需 的各 种总貌 图 、 流程 图和工 况 图.
2 1 数 据 库 组 态 .
根据 系统 总体 的控 制 要 求 和硬 件 结 构 , 要 分别 需
站、 操作 员站 、 服务 器站 、 场控 制站 等组成 . 现 在设 备组 态 中, 服务站 的 站号 为 0 现 场 控 制 站 的站 号 为 1 , , 0 操
当 1E( ) 1 S 时 ,i一 0 为 P 控 制 ;当 n > V S , D l )l 一 S E( < V时 ,i= 1 为 P D控制 . S , I
收 稿 日期 :0 1 3 2 2 1 —0 —2
作 者 简 介 : 莹 瑞 (9 2 ) 女 , 南 洛 阳 人 , 师 , 士 生 靳 18一 , 河 讲 硕
中 原 工 学 院 学 报
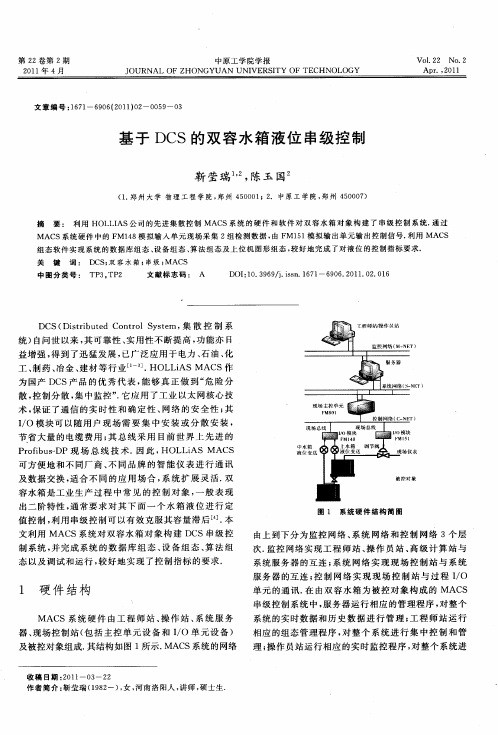
21 . 场控 制 站 由主 控 单 元 、 能 IO 单 现 智 / 元、 电源 单元 、 现场 总 线 和专 用 机 柜 等 部 分组 成 . 中 其
散, 控制 分散 , 中监 控 ” 它 应用 了工 业 以太 网核 心技 集 .
术, 保证 了通 信 的实 时 性 和 确 定 性 、 网络 的 安 全 性 ; 其 IO模 块 可 以随 用 户 现场 需 要 集 中 安装 或 分 散 安 装 , /
节省 大 量 的 电缆 费 用 ; 总 线 采 用 目前 世 界 上 先 进 的 其 P o iu — P现 场 总 线 技 术 . r f sD b 因此 , HOL i L AS MAC S
dcs水箱液位串级控制系统的设计

目录摘要 (1)Abstract: (2)1 概述 (3)1.1 过程控制介绍 (3)1.2 液位串级控制系统介绍 (4)1.3 软件介绍 (4)1.4 MCGS组态软件介绍 (5)2 被控对象建模 (7)2.1 水箱模型分析 (7)2.2 阶跃响应曲线法建立模型 (7)3 系统控制方案设计与仿真 (13)3.1 PID控制原理 (13)3.2 系统控制方案设计 (15)3.2 控制系统仿真 (16)4 建立仪表过程控制系统 (20)4.1 过程仪表介绍 (20)4.2 仪表过程控制系统的组建 (21)4.3 仪表过程控制系统调试运行 (24)5 建立计算机过程控制系统 (26)5.1 计算机过程控制系统硬件设计 (26)5.2 MCGS软件工程组态 (28)5.3 计算机过程控制系统调试运行 (38)6 结论 (40)谢词 (41)参考文献 (42)双容水箱液位串级控制系统的设计摘要:本论文的目的是设计双容水箱液位串级控制系统。
在设计中充分利用自动化仪表技术,计算机技术,通讯技术和自动控制技术,以实现对水箱液位的串级控制。
首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。
其次,根据被控对象模型和被控过程特性设计串级控制系统,采用动态仿真技术对控制系统的性能进行分析。
然后,设计并组建仪表过程控制系统,通过智能调节仪表实现对液位的串级PID控制。
最后,借助数据采集模块﹑MCGS组态软件和数字控制器,设计并组建远程计算机过程控制系统,完成控制系统实验和结果分析。
关键词:液位模型PID控制仪表过程控制系统计算机过程控制系统Abstract: The purpose of this thesis is to design the liquid level's concatenation control system of the double capacitywater tank. This design makes full use of the automaticindicator technique ﹑the computer technique﹑thecommunication technique and the automatic controltechnique in order to realize concatenation control ofwater tank's liquid. First, I carry out the analysis of thecontrolled objects' model, and use the experimentalmethod to calculate the transfer function of themodel .Next, I Design the concatenation control systemand use the dynamic simulation technique to analyze thecapability of control system. Afterwards, I design and setup the indicator process control system, realize PIDcontrol of the liquid level with intelligence indicator.Finally, I design and set up the long distance computercontrol system in virtue of the data collection module ﹑MCGS soft and digital PID controller,accomplish controlsystem experiment and analyze the outcome.Keywords: liquid level model PID control indicator process control system computer process control system1 概述1.1过程控制介绍1.工业过程控制的发展概况自本世纪30年代以来,伴随着自动控制理论的日趋成熟,自动化技术不断地发展并获得了惊人的成就,在工业生产和科学发展中起着关键性的作用。
DCS串级水箱控制方法(含组态、编程、控制方法)
《自动化装置II》DCS 实验报告学院:信息科学与技术学院小组成员:赵霆锋、xxx、xxx、xxx班级:自实1701学号(按名字顺序):2017xxxxxx、2017xxxxxx、2017xxxxxx、2017xxxxxx目录1 基于ECS-700的二阶双容水箱液位串级实验 (1)1.1 实验目的 (1)1.2 实验内容 (1)1.3 实验原理 (1)1.4 实验环境................................................................................................. 错误!未定义书签。
1.5 实验步骤................................................................................................. 错误!未定义书签。
1.6 实验小结 (22)1 基于ECS-700的二阶双容水箱液位串级实验1.1 实验目的●熟悉ECS-700系统的实验环境,通过对实验室DCS系统的实际操作,加深对集散控制系统概念的理解。
●掌握利用ECS-700组态软件VisualField对DCS控制对象现场参数进行配置,完成结构组态并实现二阶双容水箱液位串级PID控制策略的组态。
●掌握利用ECS-700组态软件VisualField对DCS监控程序的配置,并实现二阶双容水箱液位串级PID控制流程图监控画面的组态。
●掌握ECS-700系统组态发布流程,实现系统控制组态下载和监控组态发布。
●能够利用所编制组态程序对二阶双容水箱液位串级进行串级液位监控。
●掌握串级控制系统的基本概念和组成。
●掌握串级控制系统的投运与参数整定方法。
●研究随动干扰作用时对系统主被控量的影响。
1.2 实验内容ECS-700系统是WebField系列控制系统之一,是在总结JX-300XP,ECS-100等WebField系列控制系统广泛应用的基础上设计、开发的面向大型联合装置的大型高端控制系统,其融合了先进的控制技术、开放的现场总线标准、工业以太网安全技术等,为用户提供了一个可靠的、开放的控制平台。
双容水箱液位串级控制DCS实训报告
DCS实训报告一、实训目的(1)熟悉集散控制系统(DCS)的组成。
(2)掌握MACS组态软件的使用方法。
(3)培养灵活组态的能力。
(4)掌握系统组态与装置调试的技能。
二、实训内容以双容水箱为对象设计液位串级控制系统,并用MACS组态软件完成组态包括:(1)数据库组态。
(2)设备组态。
(3)算法组态。
(4)画面组态。
(5)系统组态。
三、实训设备和器材(1)THSA-1型生产过程自动化技术综合实训装置。
(2)和利时DCS控制系统。
四、实训步骤1、工程分析双容水箱液位串级控制系统需要两个输入测量信号,一个输出控制信号。
因此需要一个模拟输出模块FM148A和一个模拟输出模块FM151.采集下水箱液位信号(LT1)控制电动控制发的开度。
2、工程建立1)打开:开始→程序→macsv组态软件→数据库总控。
2)点击按钮或选择工程|新建工程,新建工程,输入工程名字:wenzhao。
工程名必须为12个以内的非中文字符,只包括字母、数字。
3)点击“确定”按钮,然后在空白处选择这个工程,此时会显示当前域号为65535等信息。
4)选择“编辑>域组号组态”,选择组号为1,将刚创建的工程从“未分组的域”移动到右边“该组所包括的域”里,点“确定”按钮。
出现当前域号:0等信息。
5)在数据库总控组态中添加变量。
选择菜单栏,编辑→编辑数据库,弹出窗口,输入用户名和口令bjhc/3dlcz。
点击“确定”按钮。
6)选择系统→数据操作,出现下面对话框,点击“确定”。
7)因为双容水箱定制控制系统用到一个模块,两个通道,所以需要编辑两个点号。
点击“AI模拟量输入”选项出现下图。
8)点击“全选A”按钮。
将右侧的选择项名选中,点击“确定”按钮。
9)选择后确定进入编辑数据界面。
10)数据库编辑,注意:设置它的参数,根据实际情况,设置设备好(即设备地址),通道号(输入通道为2,对应FM148,对应FM143),量程上限下限,点名(注意:点名不能重复使用)。
实验九DCS水箱液位控制系统
实验九DCS水箱液位控制系统实验目的1、了解单回路控制的特点和调节品质,掌握PID参数对控制性能的影响。
2、学会分析执行器风开风关特性的选择及调节器正反作用的确定。
3、初步掌握单回路控制系统的投运步骤以及单回路控制器参数调整方法。
实验设备A3000过程对象的下水箱V103,SUPCONDCS,支路系统1,支路系统2。
图9-1A3000过程控制系统示意图实验原理9-2单回路控制系统方框图图9-2为单回路控制系统方框图的一般形式,它是由被控对象、执行器、调节器和测量变送器组成一个单闭环控制系统。
系统的给定量是某一定值,要求系统的被控制量稳定至给定量。
由于这种系统结构简单,性能较好,调试方便等优点,故在工业生产中已被广泛应用。
控制器采用PID控制规律,常用的控制规律有比例(P)调节、比例积分(PI)调节、比例微分(PD)调节、比例积分微分(PID)调节。
调节器参数的整定一般有两种方法:一种是理论计算法,即根据广义对象的数学模型和性能要求,用根轨迹法或频率特性法来确定调节器的相关参数;另一种方法是工程实验法,通过对典型输入响应曲线所得到的特征量,然后查照经验表,求得调节器的相关参数。
工程实验整定法有临界振荡法、衰减振荡法。
(1)临界振荡法将Ti→∞,Td=0,调整δ至较大值,逐渐减小δ,直至出现等幅振荡如下图所示,记下δr(临界比例带),根据δr,Tα查表得δ,Ti,Td,见下表图9-2临界震荡过程表9-1临界比例度法控制器参数计算表临界比例度法的优点是应用简单方便,但此法有一定限制。
首先要产生允许受控变量能承受等幅振荡的波动,其次是受控对象应是二阶和二阶以上或具有纯滞后的一阶以上环节,否则在比例控制下,系统是不会出现等幅振荡的。
在求取等幅振荡曲线时,应特别注意控制阀出现开、关的极端状态。
(2)衰减振荡法将Ti→∞,Td=0,调δ使被控量达4:1或10:1如下图所示;对应δ,根据δ,T确定δ,Ti,Td,见下表图9-44:1衰减震荡曲线表9-2衰减曲线法控制器参数计算表实验流程介绍以第1套实验装置为例,在A3000高级过程控制实验系统中,下图所示为液位单回路控制系统。
DCS课程设计水箱液位串级控制解析
目录1 题目背景与意义 01.1 题目背景 01.2 课题意义 02 设计题目简介 (1)2.1设计内容和规定 (1)2.2 集散控制系统基本构成 (1)2.3 设计原理及分析 (4)3 系统设计方案 (7)3.1双容水箱控制 (8)3.2串级控制 (8)4 系统硬件设计 (10)4.1数据采集模块 (10)4.1.1 模拟量输入模块 (10)4.1.2 模拟量输出模块 (11)4.2仪表和执行机构选型 (13)4.3系统连线 (13)4.3.1 模拟量输入模块FM148A接线 (13)4.3.2模拟量输出模块FM151A接线 (14)5 系统软件设计 (15)5.1组态画面旳设计 (13)5.2通讯设置 (15)6 系统仿真调试 (17)7 结论 (16)参照文献........................................... 错误!未定义书签。
71 题目背景与意义1.1 题目背景集散控制系统(Distributed control system), 是以多种微处理机为基础运用现代网络技术、现代控制技术、图形显示技术和冗余技术等实现对分散控制对象旳调整、监视管理旳控制技术。
其特点是以分散旳控制适应分散旳控制对象, 以集中旳监视和操作到达掌握全局旳目旳。
系统具有较高旳稳定性、可靠性和可扩展性。
该系统将若干台微机分散应用于过程控制, 所有信息通过通信网络由上位管理计算机监控, 实现最优化控制, 整个装置继承了常规仪表分散控制和计算机集中控制旳长处, 克服了常规仪表功能单一, 人-机联络差以及单台微型计算机控制系统危险性高度集中旳缺陷, 既实现了在管理、操作和显示三方面集中, 又实现了在功能、负荷和危险性三方面旳分散。
DCS系统在现代化生产过程控制中起着重要旳作用。
伴随工业自动化水平旳不停提高, 计算机旳广泛运用, 人们对工业自动化旳规定也越来越高。
而DCS又有延续性和可扩充性, 易学易用性和通用性, 使得DCS得到长足旳发展。
水箱液位串级控制系统讲解
长沙学院CHANGSHA UNIVERSITY专业训练与创新实习报告过程控制系统实习系部:电子信息与电气工程系专业年级班级:11 电气 3 班学生姓名:学号:指导教师:成绩评定:(指导教师填写)2014年11 月实验目录实验一单闭环流量定值控制系统实验二单容液位定值控制系统实验三水箱液位串级控制系统实验一单闭环流量定值控制系统一、实验目的1.了解单闭环流量控制系统的结构组成与原理。
2.掌握单闭环流量控制系统调节器参数的整定方法。
3.研究调节器相关参数的变化对系统静、动态性能的影响。
4.研究P、PI、PD和PID四种控制分别对流量系统的控制作用。
5.掌握同一控制系统采用不同控制方案的实现过程。
二、实验设备实验对象及控制屏、各类电路挂件、计算机一台、万用表一个、导线若干;三、实验原理图4-1 单闭环流量定值控制系统(a)结构图(b)方框图本实验系统结构图和方框图如图4-1所示。
被控量为电动调节阀支路(也可采用变频器支路)的流量,实验要求电动阀支路流量稳定至给定值。
将涡轮流量计FT1检测到的流量信号作为反馈信号,并与给定量比较,其差值通过调节器控制电动调节阀的开度,以达到控制管道流量的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的调节器应为PI控制,并且在实验中PI 参数设置要比较大。
四、实验内容图4-2 智能仪表控制单闭环流量定值控制实验接线图本实验选择电动阀支路流量作为被控对象。
实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-2、F1-8、F1-11全开,其余阀门均关闭。
将“FT1电动阀支路流量”钮子开关拨到“ON”的位置。
具体实验内容与步骤可根据本实验的目的与原理参照前面的单闭环定值控制中相应方案进行,下面只给出实验的接线图。
五、实验数据曲线图4-3 单闭环流量定值控制曲线图六、实验总结单闭环流量定值控制的数据曲线中,流量设定值SV=10.0r/min,比例系数P=60,积分时间I=20,先是等幅振荡,外加一个干扰信号,数据曲线经过智能调节仪的调节后,渐渐接近稳定。
实验四 水箱液位串级控制系统
实验四水箱液位串级控制系统一、实验目的1.通过实验了解水箱液位串级控制系统组成原理。
2.掌握水箱液位串级控制系统调节器参数的整定与投运方法。
3.研究阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响。
4.掌握液位串级控制系统采用不同控制方案的实现过程。
二、实验设备1、THJ-2 型高级过程控制系统实验装置2、计算机、上位机MCGS 组态软件、RS232-485 转换器1 只、串口线1 根3、万用表1 只三、实验原理本实验为水箱液位的串级控制系统,它是由主、副两个回路组成。
每一个回路中都有一个属于自己的调节器和控制对象,即主回路中的调节器称主调节器,控制对象为下水箱,作为系统的被控对象,下水箱的液位为系统的主控制量。
副回路中的调节器称副调节器,控制对象为中水箱,又称副对象,它的输出是一个辅助的控制变量。
本系统控制的目的不仅使系统的输出响应具有良好的动态性能,且在稳态时,系统的被控制量等于给定值,实现无差调节。
当有扰动出现于副回路时,由于主对象的时间常数大于副对象的时间常数,因而当被控制量(下水箱的液位)未作出反映时,副回路已作出快速响应,及时地消除了扰动对被控制量的影响。
此外,如果扰动作用于主对象,由于副回路的存在,使副对象的时间常数大大减小,从而加快了系统的响应速度,改善了动态性能。
本实验系统结构图和方框图如图所示。
图1 水箱液位串级控制系统(a)结构图 (b)方框图四、实验内容与步骤1、本实验选择中水箱和下水箱串联作为被控对象(也可选择上水箱和中水箱)。
实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-2、F1-7全开,将中水箱出水阀门F1-10开至适当开度(40%~90%)、下水箱出水阀门F1-11开至适当开度(30%~80% 要求阀F1-10稍大于阀F1-11),其余阀门均关闭。
2、按照实验图接线,将主、副控仪表设置为自动,主控制器Sn=33,addrss=1,CF=0 ,DF=0;副控制器Sn=32,addrss=2,CF=8,DF=0;合上三相电源空气开关,磁力驱动泵上电打水,上位机的主控制器,下水箱的液位设定值8—15cm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1 题目背景与意义 (1)1.1 题目背景 (1)1.2 课题意义 (1)2 设计题目介绍 (1)2.1设计内容和要求 (1)2.2 集散控制系统基本组成 (2)2.3 设计原理及分析 (3)3 系统设计方案 (6)3.1双容水箱控制 (7)3.2串级控制 (7)4 系统硬件设计 (8)4.1数据采集模块 (8)4.1.1 模拟量输入模块 (8)4.1.2 模拟量输出模块 (9)4.2仪表和执行机构选型 (11)4.3系统连线 (11)4.3.1 模拟量输入模块FM148A接线 (11)4.3.2模拟量输出模块FM151A接线 (12)5 系统软件设计 (12)5.1组态画面的设计 (13)5.2通讯设置 (13)6 系统仿真调试 (14)7 结论 (16)参考文献........................................... 错误!未定义书签。
71 题目背景与意义1.1 题目背景集散控制系统(Distributed control system),是以多个微处理机为基础利用现代网络技术、现代控制技术、图形显示技术和冗余技术等实现对分散控制对象的调节、监视管理的控制技术。
其特点是以分散的控制适应分散的控制对象,以集中的监视和操作达到掌握全局的目的。
系统具有较高的稳定性、可靠性和可扩展性。
该系统将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人-机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。
DCS系统在现代化生产过程控制中起着重要的作用。
随着工业自动化水平的不断提高,计算机的广泛运用,人们对工业自动化的要求也越来越高。
而DCS 又有延续性和可扩充性,易学易用性和通用性,使得DCS得到长足的发展。
DCS,分散控制系统,采用控制功能分散,显示操作集中,兼顾分散而自治的集散控制系统。
并随着科学技术发展迅猛,在工控自动化领域发展中也得到很快的提高。
1.2 课题意义集散控制系统是当前先进工业控制系统主要的结构形式,在高校,集散控制系统是最接近实际生产过程的一门专业课。
通过此方向的课程设计,能够联系学生几年来学习的网络知识,计算机知识,仪表传感器知识,控制系统知识,培养学生的控制工程设计能力。
主要要求锻炼学生以下两种能力:1.通过工业数据通信与控制网络课程设计的学习,了解工业数据通信与控制网络的技术貌。
2.从介绍的基础知识入手,较深入的了解多种现场总线各自的技术特点、规范、通信控制芯片、接口电路以及控制网络的设计与应用,熟悉工控组态软件下的组态设计,并能进行较复杂的工业控制系统设计分析。
2 设计题目介绍2.1设计内容和要求根据所提供的双容水箱工艺对象,通过分析其对象动态特性,设计和实施完整的控制方案,具体完成:①根据提供的工艺对象,实验室的和利时公司集散控制系统,完成系统的网络配置,硬件系统配置。
数据库的录入。
②基础控制系统的设计,包括温度,液位控制、流量控制、被控变量、操纵变量、控制规律、阀门特性等的选择。
并说明理由;③设计相关的控制方案,进行控制算法组态,完成工程师在线下装;④仪表选型与仪表连接,包括控制器、测量变送装置、执行机构的选择,并表达出各单元之间的信号连接;⑤在MACSV或PCS7上完成DCS应用组态,包括控制算法组态和监控画面组态;2.2 集散控制系统基本组成现场控制级又称数据采集装置,主要是将过程非控变量进行数据采集和预处理,而且对实时数据进一步加工处理,供CRT操作站显示和打印,从而实现开环监视,并将采集到的数据传输到监控计算机。
输出装置在有上位机的情况下,能以开关量或者模拟量信号的方式,向终端元件输出计算机控制命令。
这一个级别直接面对现场,跟现场过程相连。
比如阀门、电机、各类传感器、变送器、执行机构等等。
它们都是工业现场的基础设备、同样也是DCS的基础。
在DCS系统中,这一级别的功能就是服从上位机发来的命令,同时向上位机反馈执行的情况。
拿军队来举例的话,可以形容为最底层的士兵。
它们只要能准确地服从命令,并且准确地向上级汇报情况即完成使命。
至于它与上位机交流,就是通过模拟信号或者现场总线的数字信号。
由于模拟信号在传递的过程或多或少存在一些失真或者受到干扰,所以目前流行的是通过现场总线来进行DCS信号的传递。
过程控制级又称现场控制单元或基本控制器,是DCS系统中的核心部分。
生产工艺的调节都是靠它来实现。
比如阀门的开闭调节、顺序控制、连续控制等等。
上面说到现场控制级是“士兵”,那么给它发号施令的就是过程控制级了。
它接受现场控制级传来的信号,按照工艺要求进行控制规律运算,然后将结果作为控制信号发给现场控制级的设备。
所以,过程控制级要具备聪明的大脑,能将“士兵”反馈的军情进行分析,然后做出命令,以使“士兵”能打赢“战争”。
这个级别不是最高的,相当于军队里的“中尉”。
它也一样必须将现场的情况反馈给更高级别的“上校”也就是下面讲的过程管理级。
过程管理级DCS的人机接口装置,普遍配有高分辨率、大屏幕的色彩CRT、操作者键盘、打印机、大容量存储器等。
操作员通过操作站选择各种操作和监视生产情况、这个级别是操作人员跟DCS交换信息的平台。
是DCS的核心显示、操作跟管理装置。
操作人员通过操作站来监视和控制生产过程,可以通过屏幕了解到生产运行情况,了解每个过程变量的数字跟状态。
这一级别在军队中算是很高的“上校”了。
它所掌握的“大权”可以根据需要随时进行手动自动切换、修改设定值,调整控制信号、操纵现场设备,以实现对生产过程的控制。
经营管理级又称上位机,功能强、速度快、容量大。
通过专门的通信接口与高速数据通路相连,综合监视系统各单元,管理全系统的所有信息。
这是全厂自动化系统的最高一层。
只有大规模的集散控制系统才具备这一级。
相当于军队中的“元帅”,他们所面向的使用者是厂长、经理、总工程师等行政管理或运行管理人员。
它的权限很大,可以监视各部门的运行情况,利用历史数据和实时数据预测可能发生的各种情况,从企业全局利益出发,帮助企业管理人员进行决策,帮助企业实现其计划目标。
图1 集散控制系统分布图2.3 设计原理及分析集散系统实质上是一种分散型自动化系统,又称做以微处理机为基础的分散综合自动化系统。
集散系统具有分散监控和集中综合管理两方面的特征,而更将"集"字放在首位,更注重于全系统信息的综合管理。
工业自动化不仅体现在工业现场,也体现在企业事务行政管理上。
集散系统的发展及工业自动化的需求,导致了一个更庞大、更完善的计算机集成制造系统CIMS的诞生。
集散系统一般分为三级:过程级、监控级和管理信息级。
集散系统是将分散于现场的以微机为基础的过程监测单元、过程控制单元、图文操作站及主机(上位机)集成在一起的系统。
它采用了局域网技术,将多个过程监控、操作站和上位机互连在一起,使通信功能增强,信息传输速度加快,吞吐量加大,为信息的综合管理提供了基础。
因为CIMS具有提高生产率、缩短生产周期等一系列极具吸引力的优点,所以已经成为未来工厂自动化的方向。
而集散控制系统的组成主要分为:(1)分散过程控制级(DDC)(2)计算机监督控制级(SCC)(3)生产管理机如下图,分散过程控制级是DCS的基础,用于直接控制生产过程。
它由各工作站组成,每一个工作站分别完成数据采集、顺序控制或某一被控制量的闭环控制等。
分散过程控制级收集的数据供监控级调用,各工作站接受监控级发送的信息,并依次而工作,因此局部的故障不会影响整个系统的工作,从而避免了集中控制系统中“危险集中”缺点。
监控级的任务是对生产过程进行监视与操作。
监控级根据生产管理机的技术要求,确定分散过程控制级的最优给定量。
监控级能全面地反映各工作站的情况,提供充分的信息,因管理机则是整个系统的中枢,它根据监控级提供的信息及生产任务的要求,编制全面反映整个系统工作情况的报表,审核控制方案,选择数据模型,定制最优控制策略,并对下一级下达命令。
图2 集散控制系统基本构成此次课程设计从温度、液位、流量,三个被控量中选择一个。
并根据被控量的特性设计控制回路,即完成单回路控制系统和串级回路控制系统的设计。
根据自己对知识的了解,以及对以前知识的回顾。
决定此次课程设计的被控量为:液位。
设备的被控对象有:①水箱:包括上水箱、储水箱。
上水箱采用淡蓝色优质有机玻璃,不但坚实耐用,而且透明度高,便于学生直接观察液位的变化和记录结果。
上水箱尺寸为:D=25cm,H=20cm;水箱结构独特,由三个槽组成,分别为缓冲槽、工作槽和出水槽,进水时水管的水先流入缓冲槽,出水时工作槽的水经过带燕尾槽的隔板流入出水槽,这样经过缓冲和线性化的处理,工作槽的液位较为稳定,便于观察。
②管道及阀门:整个系统管道由敷塑不锈钢管连接而成,所有的手动阀门均采用优质球阀,彻底避免了管道系统生锈的可能性。
有效提高了实验装置的使用年限。
其中储水箱底部有一个出水阀,当水箱需要更换水时,把球阀打开将水直接排出。
设备的变送器有:①压力传感器、变送器:三个压力传感器分别用来对上、中、下三个水箱的液位进行检测,其量程为0~5KP,精度为0.5级。
采用工业用的扩散硅压力变送器,带不锈钢隔离膜片,同时采用信号隔离技术,对传感器温度漂移跟随补偿。
采用标准二线制传输方式,工作时需提供24V直流电源,输出:4~20mADC。
②流量传感器、变送器:三个涡轮流量计分别用来对由电动调节阀控制的动力支路、由变频器控制的动力支路及盘管出口处的流量进行检测。
它的优点是测量精度高,反应快。
采用标准二线制传输方式,工作时需提供24V直流电源。
流量范围:0~1.2m3/h;精度:1.0%;输出:4~20mADC。
设备的执行机构有:①电动调节阀:采用智能直行程电动调节阀,用来对控制回路的流量进行调节。
电动调节阀型号为:QSTP-16K。
具有精度高、技术先进、体积小、重量轻、推动力大、功能强、控制单元与电动执行机构一体化、可靠性高、操作方便等优点,电源为单相220V,控制信号为4~20mADC或1~5VDC,输出为4~20mADC的阀位信号,使用和校正非常方便。
②水泵:本装置采用磁力驱动泵,型号为16CQ-8P,进口直径:16㎜,出口直径:12㎜,温度:<=100℃,流量为30升/分,扬程为8米,功率为180W。
泵体完全采用不锈钢材料,以防止生锈,使用寿命长。
本装置采用两只磁力驱动泵,一只为三相380V恒压驱动,另一只为三相变频220V输出驱动。
③电磁阀:在本装置中作为电动调节阀的旁路,起到阶跃干扰的作用。