双容水箱液位串级控制系统DCS实训报告毕业论文
双容水箱液位串级控制系统_毕业设计

双容水箱液位串级控制系统_毕业设计
在双容水箱液位串级控制系统中,通常有两个水箱,分别称为主水箱
和副水箱。
主水箱通常是较大的水箱,副水箱是较小的水箱。
系统的目标
是保持主水箱和副水箱的液位稳定在设定值附近。
系统的控制过程可以分为以下几个步骤:
1.流程测量:系统通过测量主水箱和副水箱的液位,获取当前的液位
信号。
2.控制计算:根据测量值和设定值,计算需要调节的阀门开度。
3.阀门控制:根据计算结果,控制阀门的开度,调节水的流入和流出
速度,以实现液位的控制。
4.反馈调整:根据阀门控制后的效果,不断调整阀门开度,使液位稳
定在设定值附近。
在实际的设计中,双容水箱液位串级控制系统通常采用PID控制器来
实现。
PID控制器包括比例(P)、积分(I)和微分(D)三个部分。
比
例部分根据偏差的大小进行调整,积分部分根据偏差的持续时间进行调整,微分部分根据偏差的变化速率进行调整。
通过不断调整PID参数,实现系
统的稳定性和响应速度的平衡。
另外,在实际的设计中,还需要考虑到系统的动态响应、稳定性、静
差和抗干扰性等因素。
可以采用仿真软件进行系统的建模和分析,优化系
统的设计参数。
总之,双容水箱液位串级控制系统作为一种常见的控制系统,在工业、农业和民用领域有着广泛的应用。
通过合理设计和调节控制参数,可以实
现液位的稳定控制,提高系统的稳定性和安全性。
同时,与实际的实验和仿真相结合,可以进一步优化系统的设计和控制策略。
实验方案:水箱液位串级控制系统

过程控制综合实验报告实验名称:水箱液位串级控制系统专业:班级:姓名:学号:实验方案一、实验名称:水箱液位串级控制系统二、串级控制系统的概述1、图5-1是串级控制系统的方框图。
该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
图5-1 串级控制系统方框图R-主参数的给定值;C1-被控的主参数;C2-副参数;f1(t)-作用在主对象上的扰动;f2(t)-作用在副对象上的扰动。
2、串级控制系统的特点串级控制系统及其副回路对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
(1).改善了过程的动态特性;(2).能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力;(3).提高了系统的鲁棒性;(4).具有一定的自适应能力。
3、主、副调节器控制规律的选择在串级控制系统中,主、副调节器所起的作用是不同的。
主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。
由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。
4、主、副调节器正、反作用方式的选择正如单回路控制系统设计中所述,要使一个过程控制系统能正常工作,系统必须采用负反馈。
对于串级控制系统来说,主、副调节器的正、反作用方式的选择原则是使整个系统构成负反馈系统,即其主通道各环节放大系数极性乘积必须为正值。
各环节的放大系数极性是这样规定的:当测量值增加,调节器的输出也增加,则调节器的放大系数K c为负(即正作用调节器),反之,K c为正(即反作用调节器);本装置所用电动调节阀的放大系数K v恒为正;当过程的输入增大时,即调节器开大,其输出也增大,则过程的放大系数K0为正,反之K0为负。
基于DCS的双容水箱液位串级控制
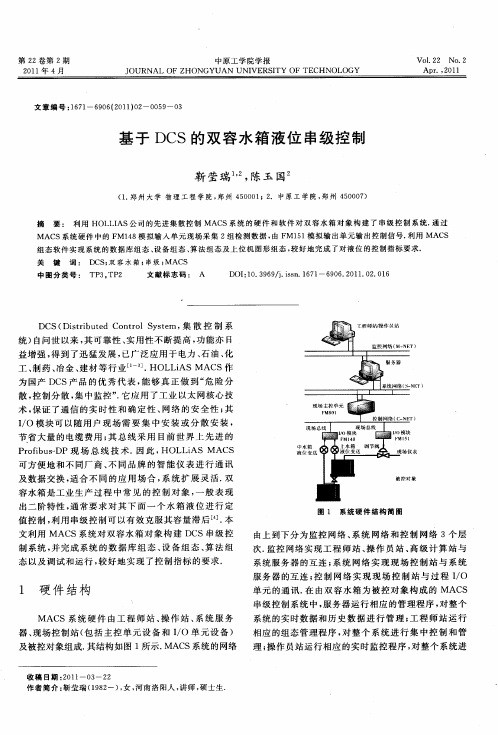
配置 ; 算法 组态用 来 规划控 制方 案 的组织 和基本 构成 ;
上位机 图形 组 态则 是 利 用 MAC S系 统 生 成 应用 系统
所需 的各 种总貌 图 、 流程 图和工 况 图.
2 1 数 据 库 组 态 .
根据 系统 总体 的控 制 要 求 和硬 件 结 构 , 要 分别 需
站、 操作 员站 、 服务 器站 、 场控 制站 等组成 . 现 在设 备组 态 中, 服务站 的 站号 为 0 现 场 控 制 站 的站 号 为 1 , , 0 操
当 1E( ) 1 S 时 ,i一 0 为 P 控 制 ;当 n > V S , D l )l 一 S E( < V时 ,i= 1 为 P D控制 . S , I
收 稿 日期 :0 1 3 2 2 1 —0 —2
作 者 简 介 : 莹 瑞 (9 2 ) 女 , 南 洛 阳 人 , 师 , 士 生 靳 18一 , 河 讲 硕
中 原 工 学 院 学 报
21 . 场控 制 站 由主 控 单 元 、 能 IO 单 现 智 / 元、 电源 单元 、 现场 总 线 和专 用 机 柜 等 部 分组 成 . 中 其
散, 控制 分散 , 中监 控 ” 它 应用 了工 业 以太 网核 心技 集 .
术, 保证 了通 信 的实 时 性 和 确 定 性 、 网络 的 安 全 性 ; 其 IO模 块 可 以随 用 户 现场 需 要 集 中 安装 或 分 散 安 装 , /
节省 大 量 的 电缆 费 用 ; 总 线 采 用 目前 世 界 上 先 进 的 其 P o iu — P现 场 总 线 技 术 . r f sD b 因此 , HOL i L AS MAC S
双容水箱串级PID控制实验液位

双容水箱液位串级PID控制实验一、实验目的1、进一步熟悉PID调节规律2、学习串级PID控制系统的组成和原理3、学习串级PID控制系统投运和参数整定二、实验设备1、四水箱实验系统DDC实验软件2、PC机(Window 2000 Professional 操作系统)三、实验原理1、控制系统的组成及原理一个控制器的输出用来改变另一个控制器的设定值,这样连接起来的两个控制器称为“串级”控制器。
两个控制器都有各自的测量输入,但只有主控制器具有自己独立的设定值,只有副控制器的输出信号送给被控对象,这样组成的系统称为串级控制系统。
本仿真系统的双容水箱串级控制系统如下图所示:图17-1 本仿真系统的双容水箱串级控制系统框图串级控制器术语说明主变量:y1称主变量。
使它保持平稳使控制的主要目的副变量:y2称副变量。
它是被控制过程中引出的中间变量副对象:上水箱主对象:下水箱主控制器:PID控制器1,它接受的是主变量的偏差e1,其输出是去改变副控制器的设定值副控制器:PID控制器2,它接受的是副变量的偏差e2,其输出去控制阀门副回路:处于串级控制系统内部的,由PID控制器2和上水箱组成的回路主回路:若将副回路看成一个以主控制器输出r2为输入,以副变量y2为输出的等效环节,则串级系统转化为一个单回路,即主回路。
串级控制系统从总体上看,仍然是一个定值控制系统,因此,主变量在干扰作用下的过渡过程和单回路定值控制系统的过渡过程具有相同的品质指标。
但是串级控制系统和单回路系统相比,在结构上从对象中引入一个中间变量(副变量)构成了一个回路,因此具有一系列的特点。
串级控制系统的主要优点有:1)副回路的干扰抑制作用发生在副回路的干扰,在影响主回路之前即可由副控制器加以校正2)主回路响应速度的改善副回路的存在,使副对象的相位滞后对控制系统的影响减小,从而改善了主回路的相应速度3)鲁棒性的增强串级系统对副对象及控制阀特性的变化具有较好的鲁棒性4)副回路控制的作用副回路可以按照主回路的需要对于质量流和能量流实施精确的控制由此可见,串级控制是改善调节过程极为有效的方法,因此得到了广泛的应用。
双容水箱液位控制系统毕业设计
本科生毕业论文(设计)双容水箱液位控制系统院-系:工学院专业:电气工程及其自动化年级:学生姓名:学号:导师及职称:Department:Major:Electrical engineering and automation Grade:Student’s Name:Student No:Tutor:\毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解红河学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:毕业论文(设计)答辩委员会(答辩小组)成员名单【摘要】随着现代工业生产过程向着大型、连续和强化方向发展,对控制系统的控制品质提出了日益增长的要求。
在这种情况下,简单的单回路控制已经难以满足一些复杂的控制要求。
串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。
串级控制系统把两个单回路控制系统以一定的结构形式串联在一起,它不仅具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。
串级控制系统采用了两个调节器,因此它的调节器的参数整定更复杂一些。
本论文论述了一个液位——流量串级控制系统的设计方法和步骤,介绍了它的参数整定方法。
在此过程中,介绍了对液位和流量进行检测和转换的常用元件,应用阶跃响应曲线推导了广义对象的传递函数,简单地论述了串级控制系统的优点,讨论了它对控制效果的改善作用,并使用仿真软件对该系统进行了仿真,最后用组态软件编制程序来实现控制。
双容水箱液位控制系统毕业设计

双容水箱液位控制系统毕业设计双容水箱液位控制系统是一种用于控制水箱液位的智能化系统,通过传感器、控制器和执行器等组件,实现对水箱液位的自动监测与控制。
本文将介绍关于双容水箱液位控制系统的毕业设计,包括设计目标、系统结构、工作原理和关键技术等方面的内容。
首先,设计目标是实现对双容水箱液位的智能化控制,以提高水箱的利用率和节约水资源。
具体目标包括:准确监测水箱液位,实时调节进水与排水流量,保持水箱液位在合理范围内。
其次,双容水箱液位控制系统的结构主要包括传感器模块、控制模块和执行器模块。
传感器模块用于监测水箱液位,可以采用压力传感器、浮球传感器或超声波传感器等;控制模块负责收集传感器数据,进行算法分析和决策,控制执行器模块的动作;执行器模块包括水泵和电磁阀等组件,通过控制水泵的运行和电磁阀的开关,调节进水与排水的流量,从而控制水箱液位。
系统的工作原理是首先通过传感器获取水箱液位信息,并传输给控制模块进行处理。
控制模块根据设定的液位范围和液位变化规律,判断当前液位状态,决定执行器的动作。
如果液位过高,则控制模块发送信号给执行器模块,开启电磁阀进行排水;如果液位过低,则控制模块发送信号给执行器模块,启动水泵进行进水。
通过不断的反馈和调整,控制系统可以使液位保持在合理范围内。
关键技术包括传感器选择与布置、控制算法设计和执行器参数调节等。
传感器的选择和布置需要考虑液位变化范围和液位测量的准确性;控制算法的设计需要根据实际情况制定,包括液位判断标准和动作决策规则;执行器参数调节需要根据实际需求和系统响应特性进行调整和优化。
综上所述,双容水箱液位控制系统的毕业设计旨在实现对水箱液位的智能化监测与控制。
通过设计合理的系统结构、优化的工作原理和关键技术的应用,可以实现对水箱液位的准确监测和精确控制,提高水资源的利用效率。
双容水箱液位监控系统设计毕业设计论文
设计题目
双容水箱液位监控系统
课程名称
工控系统监控程序设计
姓名
学号
班级
自动化
设计日期
双容水箱液位监控系统组态设计
摘 要
本课程设计运用工业监控系统组态软件(MCGS),结合一个自动控制系统,完成该控制系统的上位机监控系统组态设计。使学生掌握监控软件的设计和编程方法,得到计算机监控系统程序设计与调试,以及编写设计技术文件的初步训练。为从事计算机控制方面的工作打下一定基础。本课程设计要求运用工业监控系统组态软件(MCGS),结合一个双容水箱液位监控系统,完成该控制系统的上位机监控系统组态设计。主界面中有二个储藏罐,它们在本设计中只是作为容器。在主界面中还有二个调节阀和一个水泵,二个调节阀门分别是控制两水罐液位和用户用水,水泵控制水罐1液位。当我们启动系统后进入主界面我们首先在手动状态下按动启动按钮,然后水罐1和水罐2中的水位能根据“水泵”和“出水阀”的开闭状况自动合理变化,待系统稳定后,手动调节出水阀,系统再次自动合理变化。期间画面也能显示出水罐1和水罐2液位变化的数值,并且管道也能模拟液体的流动。并且在主界面中也能直接观察实时曲线,查看系统的稳定情况。当我们要观察历史数据、历史曲线和报警信息时,只需点击窗口左上方对应窗口即可。若要退出系统,只需点击窗口右下方的退出就会退出运行系统。
关键词:双容水箱;液位; 水罐; 报警
Double let water tank liquid level monitoring system configuration design
Abstract
This course design using industrial monitoring and control system configuration software (MCGS), combining with an automatic control system, complete the PC monitoring system configuration of the control system design. Enable students to master the design of monitoring software and programming method of computer monitoring and control system programming and debugging, technical documents and write design of initial training. To work in the computer control to lay a certain foundation. This course design requires use of industrial monitoring system configuration software (MCGS), combined with a double let water tank liquid level monitoring system, complete the PC monitoring system configuration of the control system design. The main screen has two tanks, they just as a container in this design. In the main interface as well as two regulating valve and a water pump, two regulating valves are respectively two water tank liquid level and user control, water pump control water tank liquid level 1. When we start the system last in capturing the interface we first in manual state, press the start button, and then water tank 1 and the water level in tank 2 can according to the "water pump" and "water" reasonable change of automatic open and close condition of the stay system stabilized, manually adjust the water valve, reasonable system again automatically change. During the screen can show the water tank 1 and 2 level changes of numerical POTS, and can simulate the flow of the liquid pipe. And in the main interface can be directly observed in real time curve, check the system stability. When we watch the historical data, historical curve and alarm information, just click the upper left window corresponding to the window. If you want to exit the system, simply click onthe window to therightexit will exit the operation system.
DCS课程设计 水箱液位串级控制

目录1 题目背景与意义11.1 题目背景11.2 课题意义 (1)2 设计题目介绍 (1)2.1设计内容和要求 (1)2.2 集散控制系统根本组成 (2)2.3 设计原理及分析 (3)3 系统设计方案 (6)3.1双容水箱控制 (7)3.2串级控制 (7)4 系统硬件设计 (8)4.1数据采集模块 (8)4.1.1 模拟量输入模块 (8)4.1.2 模拟量输出模块 (9)4.2仪表和执行机构选型 (11)4.3系统连线 (11)4.3.1 模拟量输入模块FM148A接线 (11)4.3.2模拟量输出模块FM151A接线 (12)5 系统软件设计 (13)5.1组态画面的设计 (13)5.2通讯设置 (13)6 系统仿真调试 (15)7 结论 (16)参考文献 ......................................................... 错误!未定义书签。
71 题目背景与意义1.1 题目背景集散控制系统〔Distributed control system〕,是以多个微处理机为根底利用现代网络技术、现代控制技术、图形显示技术和冗余技术等实现对分散控制对象的调节、监视管理的控制技术。
其特点是以分散的控制适应分散的控制对象,以集中的监视和操作到达掌握全局的目的。
系统具有较高的稳定性、可靠性和可扩展性。
该系统将假设干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克制了常规仪表功能单一,人-机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。
DCS系统在现代化生产过程控制中起着重要的作用。
随着工业自动化水平的不断提高,计算机的广泛运用,人们对工业自动化的要求也越来越高。
而DCS 又有延续性和可扩大性,易学易用性和通用性,使得DCS得到长足的开展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DCS实训报告双容水箱液位串级控制系统一、实训目的(1)、熟悉集散控制系统(DCS)的组成。
(2)、掌握MACS组态软件的使用方法。
(3)、培养灵活组态的能力。
(4)、掌握系统组态与装置调试的技能。
二、实训内容及要求以THSA-1型生产过程自动化技术综合实训装置为工业对象。
完成中水箱和下水箱串级液位控制系统的组态。
要求:设计液位串级控制系统,并用MACS组态软件完成组态。
包括:(1)、数据库组态。
(2)、设备组态。
(3)、算法组态。
(4)、画面组态。
(5)、在实验装置上进行系统调试。
三、工程分析THSA-1型生产过程自动化技术综合实训装置中水箱和下水箱串级液位控制系统需要2个输入测量信号,1个输出控制信号。
因此,该系统包括:(1)、该系统有2个AI点LT1、LT2,1个AO点LV1。
(2)、该系统需要1个模拟量输入模块FM148用于采集中水箱液位信号LT1和下水箱液位信号LT2;1个模拟量输出模块FM151用于控制电动控制阀的开度LV1。
并且FM148的设备号为2号,FM151的设备号为3号。
(3)、LT1按2号设备的第1通道,LT2按2号设备的第2通道。
LV1按3号设备的第1通道。
(4)、系统配备1个现场控制站10站,1台服务器兼操作员站。
四、实训步骤1、工程的建立(1)、打开:开始macsv组态软件数据库总控。
(2)、选择工程/新建工程,新建工程并输入工程名;Demo。
(3)、点击“确定”按钮,然后在空白处选择“demo”工程。
工程信息如下图所示:(4)、选择“编辑>域组号组态”,选择组号为1,将刚创建的工程“demo”从“未分组的域”移到右边“改组所包含的域”里,点击“确认”按钮。
然后,在数据库总控组态软件窗口会出现当前工程名、当前域号、该域分组号、系统总点数。
(5)、数据库组态。
(a)、在菜单栏的“编辑”下,选择“编辑数据库”,弹出窗口,输入用户名和口令bjhc/3dlcz,进入数据库组态编辑窗口。
(b)、选择系统数据库操作,出现“提示”对话框,点击“确定”按钮。
并弹出“选择数据窗口风格”,点击“AI模拟量输入”,将右侧的选择项名(点名、点说明、设备号、通道号、量程上限、量程下限)选中,点击“确定”按钮。
(c)、选择后确定进入编辑数据界面,点击“编辑添加”,然后编辑AI数据库,添加完变量后,选择“编辑更新数据库”。
AI数据库信息如下图所示:(d)、依据同样的方法编辑AO数据库。
AO数据库信息如下图所示:2、设备组态步骤为系统内的所有设备包括服务器、操作站、控制站、输入输出模块指定地址,从而建立它们之间的联系。
(1)、打开:“开始程序macsv组态软件设备组态工具”,定义系统设备和I/O设备。
(2)、选择打开新建的工程“demo”后点击“确定”按钮。
(3)、设置系统设备。
选择菜单栏“编辑系统设备”。
打开系统设备组态对话框,设置上层的以太网网络,网络A:128,网络B:129;点击“下一步”,出现提示对话框,选择“单机”;点击“下一步”,设置“I/O控制站数量:1;控制站数量:1”,出现提示对话框后,点击“开始”按钮。
(4)、出现MACS设备组态信息,系统设备设置完毕。
(5)、选择菜单栏“编辑I/O设备”,设置现场控制站DP。
选择DP,点击右键,在下拉菜单中选添加设备,分别添加使用到的设备:FM148一块,FM151一块。
并且分别将FM148、FM151的设备地址分别改为2、4,完毕后,选中现场控制站,单击菜单栏上的“编译”,显示编译成功,保存I/O设备,关闭窗口。
I/O设备信息如下图所示:3、打开:“开始程序macsv组态软件数据库总控”,选择菜单栏中的“编译/基本编译”,显示数据库编译成功,则数据库组态完毕。
4、服务器算法组态步骤(1)、打开服务器算法组态,在菜单栏中选择“文件新建工程”,选择刚才新建的工程:demo,并点击“确定”按钮。
(2)、选择文件新建站,在新建的工程下新建为服务器和控制站10,新建站保存到默认的安装目录下,点击“保存”按钮。
(3)、选中“服务器”,点击工具栏中的“新建方案”按钮,新建服务器算法方案,选择“FM”类型方案建立服务器算法方案。
并将新建服务器算法方案保存到默认的安装目录下。
(4)、左双击新建服务器算法方案,在“P1-1”右侧的空白框中键入“getsysper(_FUHE00)”几个字符,添加完毕,保存方案页。
(5)、打开“数据库总控”,选择新建工程demo”,在“数据库编辑”下的“AM”项名,全选后确定,在类型数据库里添加“FUHE00”中间量点,并更新数据库。
(6)、中间量添加完毕,点击菜单栏“编译”中的“当前方案”实现本方案页编译,编译成功,点击工具栏中保存本方案页。
(7)、选中“服务器”点击鼠标右键,编译“服务器”站,选择“全部重编”,最终出现编译成功。
(8)、选中工程“demo”点击右键,编译工程,出现提示窗口,选择“是”,最后出现“工程编译成功”。
工程编译成功后,保存工程,并退出“服务器算法组态”。
(9)、打开数据库总控,选择工程demo,并且保证当前的域号为0。
选择工具栏中的“数据库编译”,编译成功后,选择“数据库下装/生成全部下装文件”,生成下装文件成功后,关闭数据库。
5、控制器算法组态步骤(1)单击桌面上的“开始”“程序”“MACV组态软件”“控制器算法组态”,就会弹出工程选择窗口,选择“demo”. (2)选择工程后,点击“选择”按钮,就会弹出控制站选择窗口,选择“10站”进行算法组态的控制站。
(3)选中控制站后点击“确定”按钮。
控制器算法即启动。
(4)单击左下角“资源”按钮后,双击选择“目标设置”,“控制器类型”选择“Hollysys CoDeSys SP for QNX”。
如果没有,选择NONE。
(5)具体设置可参照MACSV组态手册,点击“确认”按钮,双击“任务配置”,可弹出任务配置窗口,在这里可以设置程序运行类型及程序循环周期,默认值为250ms。
(6)双击“MACSV配置”,弹出“MASCV配置”对话框,如下图:(7)双击“库管理器”。
在库管理器左上角处右键“添加库”。
(8)选择“hsac”文件,打开。
Hsac.lib 是PID功能块的库文件名。
(9)设备组态里定义的设备信息可以在“MACS配置”窗口里看到。
在菜单栏里选择“工程”下的“全部在编译”如图所示:(10)在下方信息栏窗口可以看到编译信息,如过系统不需要SOE 报警,可以在主程序中将“SOE”语句删除。
删除后在选择“工程”“全部再编译”,系统无错误提示。
6、控制器程序编写步骤(1)如下图所示,在对象组织器中,选中POUs,可以新建一个文件夹,重命名为“THJ-3”,然后选中文件夹,单击鼠标右键,选中“增加对象”,弹出创建POU窗口,命名新的POU。
将下图中的PLC-PRG重命名为POU,并按下图选择。
(2)在资源全局变量中,如图所示声明变量。
注意:一条声明要写在一行中。
PID01:HSPID:=(SP:=20,CP:=0.25,DL:=100,MC:=0,RM:=0,PT:=10 0,TI:=30,KD:=10,OT:=100,OB:=0,PK:=0,OM:=0,AD:=1,ME:=1 ,AE:=1,CE:=0,PU:=200,PD:=0);PID02:HSPID:=(SP:=20,CP:=0.25,DL:=100,MC:=1,RM:=0,PT:=10 0,TI:=30,KD:=10,OT:=100,OB:=0,PK:=0,OM:=0,AD:=1,ME:=1 ,AE:=1,CE:=1,PU:=200,PD:=0);(3)在主程序中编写程序,可根据具体情况编写。
(4)编写子程序选中程序名SY1,右键,添加程序,出现对话框,选CFC,出现下图。
此时要注意工具栏上的图标。
在工具栏中选择增加快,他可随鼠标移动,再合适位置时击左键,插入成功。
可根据需要改变功能块的名称,例如将AND改为HSPID,关于功能块的说明可参考帮助。
为PID模块增加输入、输出端子:编写好后选择“工程全部再编译”,检查是否有错误。
保存工程。
7、图形组态步骤(1)打开“开始程序macsv组态软件图形组态工具”。
选择工程,新建一画面,取一文件名如SY1,这时将生成一个SY1.hsg在文件。
根据实际需要组态画面内容。
如图所示:选择具有动态功能部分和变量连接起来,如要显示上水箱液位,右键选择XXX.X选择动态特性,设置其文字特性;如需要实现弹出窗口功能,则选择交互特性,设置推出窗口特性:注意:图形组态里用到的点名都应为在控制器算法组态里定义过的点。
五.下装程序、运行调试(1)打开数据库总控,直接导入你组态好的工程;(最好已启动服务器)(2)进行基本编译联编完全编译,生成下装文件;(3)关闭数据库总库,打开控制算法组态软件,进行控制站下装。
步骤:工程编译全部清空,点在线登录若通讯正常,则提示下装信息,确定就可以了,否则,通讯错误,要设置通讯参数。
方法:在线通讯参数,在弹出的界面中,两个地址均为128.10,若不是,则REMOVE它,NEW一个,NAME为128.10选项为TCR/IP,点OK;再将Value值中Localhost改为128.0.0.10,并在页面的空白处单击一下,点OK。
再次做“在线”登陆。
效果如下图所示:(4)关闭控制器算法软件,停止服务器程序。
(5)打开开始MACSV操作员站软件操作员站配置工具,配置操作员在线启动时的初始界面:选底图个数为1 高级配置:输入你绘制的操作界面图名(该图在D:\MACSV_ENG\你的工程名目录\graph\中)。
点击确认,退出。
如图:在“窗口打开文件”一栏换成你在画面组态时所做的流程图文件,如demo.hsg。
(6)打开数据库总控,选择文件域组号组态选择要做的工程名,单击确定(域号0,组号1)完全编译,成功生成下装文件。
(这一步不做,则无法进行第8步)(7)关闭数据库总控,包括右下角的图标(红黄绿三个小圈),启动服务器。
(8)打开工程师在线,初次进入时用superman/macsv登陆,选择你的工程,确定,进入工程师站界面,提示“无用户”。
(9)可以从“用户管理”中添加用户,也可以用已有的用户名登录,然后选择“系统命令”下装。
(10)先下装服务器,双击128.0.0.1,此时128.0.0.1将出现在IP地址一栏中,击下一步,开始下装服务器。
(11)再装操作员站,选128.0.0.50,下一步即可。
步骤如下图:(12)关闭工程师在线下装,在服务器端重启服务程序,在操作员站打开操作员在线软件,在工程师功能中选择登录,输入用户名superman/macsv。
服务器启动成功后,就可以用新组态的工程做实训了。