摆动法测量转动惯量
三线摆测刚体转动惯量实验原理

三线摆测刚体转动惯量实验原理实验原理:实验目的是通过三线摆测量刚体的转动惯量。
转动惯量是描述刚体旋转惯性的物理量,它反映了刚体旋转所具有的抵抗力和惯性力。
转动惯量的大小决定了刚体旋转时所需要的作用力和旋转轴的位置。
三线摆是一种常用的实验方法,可以通过测量摆长和摆动周期,从而确定刚体转动惯量。
实验装置主要有一个三线摆和被测刚体。
三线摆由两个垂直的针孔固定在一根水平的悬臂上,被测刚体作为一个物体,通过一个线索系在悬臂上。
实验时,被测刚体在水平面内以包含顶点的竖直线旋转,通过测量摆动的周期和摆长,可以计算出刚体的转动惯量。
实验中还需要定标器和计时器等辅助装置。
实验步骤如下:1. 准备工作:将被测刚体固定在线索上,并将线索系在三线摆上,调整线索长度,使得被测刚体能够在不受摩擦的情况下自由旋转。
对于较大的转动惯量的刚体,可以增加线索长度,减小线索的转动阻力。
2. 初始调整:将被测刚体转动到竖直线上,并释放刚体,观察并记录摆动的周期和摆长。
通过多次摆动,取平均值得到准确的数据。
3. 测量周期:用定标器测量摆动的周期。
在刚体运动时,通过计时器来记录摆动的时间。
4. 测量摆长:用一根尺子测量悬臂的长度,即线索从悬臂固定点到刚体的距离。
同样的,通过多次测量取平均值得到准确的数据。
5. 数据处理:利用已知的公式和测得的数据,计算出被测刚体的转动惯量。
转动惯量常用符号为I,具体的计算公式为I=mr²,其中m为刚体的质量,r为转动的半径。
实验注意事项:1. 在实验时要确保线索和悬臂没有任何摩擦,以免影响测量的精度,如果发现有摩擦,需要及时进行调整。
2. 在测量线索长度时,要确保线索拉直且水平,以减小测量误差。
可以通过目测和使用水平仪来调整线索的位置。
3. 在测量周期时,要确保计时器的精度和准确度,避免误差产生。
4. 在摆动过程中要保持摆动的幅度相对较小,避免摆动时产生非线性的误差。
通过三线摆测量刚体转动惯量的实验原理,可以帮助我们了解到刚体旋转惯性的重要性,并通过实验数据计算出转动惯量的大小,更加直观地感受到转动的抵抗力和惯性力。
摆动法测量转动惯量
图4-1单摆原理实验4 用复摆测量刚体的转动惯量一、实验目的1.学习掌握对长度和时间的较精确的测量;2.掌握重力加速度的方法,并加深对刚体转动理论的理解; 3.学习用作图法处理、分析数据。
二、实验仪器JD-2物理摆、光电计时器等三、实验原理1.单摆如图4-1(单摆球的质量为m )当球的半径远小于摆长l 时,应用动量矩定理,在角坐标系可得小球自由摆动的微分方程为:01212=+θθSin lg dtd (4-1)式中t 为时间,g 为重力加速度,l 为摆长。
当1θ(rad )很小时,11sin θθ≈ (4-2)则(4-1)式可简化为:01212=+θθlg dtd (4-3)令 lg =21ω (4-4)(4-3)式的解为:)sin(1101αωθθ+=t (4-5 )式中10θ,α由初值条件所决定。
周期 gl T π21= (4-6)图4-2 物理摆(复摆)2.物理摆一个可绕固定轴摆动的刚体称为复摆或物理摆。
如图4-2,设物理摆的质心为C ,质量为M ,悬点为O ,绕O 点在铅直面内转动的转动惯量为0J ,OC 距离为h ,在重力作用下,由刚体绕定轴转动的转动定律可得微分方程为θθsin 22Mgh dtd J -= (4-7)令 02J Mgh =ω(4-8)仿单摆,在θ很小时,(4-7)式的解为:)sin(αωθθ+=t (4-9)MghJ T 02π= (4-10)设摆体沿过质心C 的转动惯量为C J ,由平行轴定理可知:20Mh J J C += (4-11)将(4-11)代入(4-10)可得:gh MghJ T C +=π2 (4-12)(4-12)式就是物理摆的自由摆动周期T 和(4-13)式右端各参变量之间的关系。
实验就是围绕(4-12)式而展开的。
因为对任何C J 都有C J ∝M ,因此(4-13)式的T 与M 无关,仅与M 的分布相关。
令2Ma J =,a 称为回转半径,则有 gh ghaT +=2(4-13)①一次法测重力加速度g由(4-12)式可得出MhMh J g C )(422+=π (4-14)测出(4-14)右端各量即可得g ;摆动周期T ,用数字计时器直接测出,M 可用天平称出,C 点可用杠杆平衡原理等办法求出,对于形状等规则的摆,C J 可以计算出。
摆动法测量转动惯量
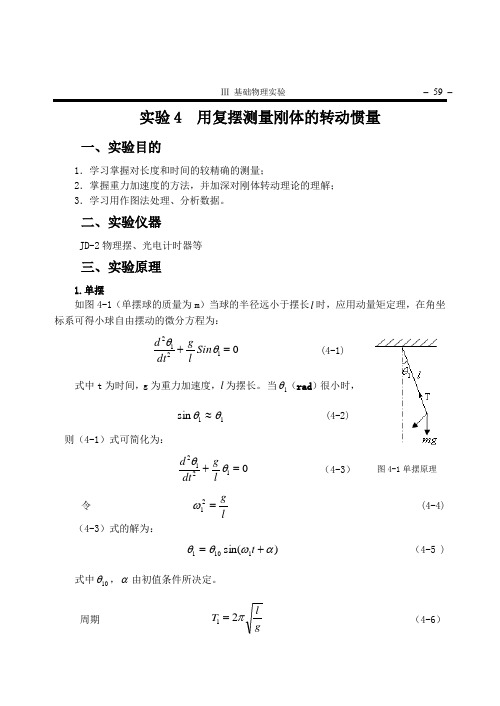
图4-1单摆原理 实验4 用复摆测量刚体的转动惯量一、实验目的1.学习掌握对长度和时间的较精确的测量;2.掌握重力加速度的方法,并加深对刚体转动理论的理解;3.学习用作图法处理、分析数据。
二、实验仪器 JD-2物理摆、光电计时器等三、实验原理1.单摆如图4-1(单摆球的质量为m )当球的半径远小于摆长l 时,应用动量矩定理,在角坐标系可得小球自由摆动的微分方程为:01212=+θθSin lg dt d (4-1) 式中t 为时间,g 为重力加速度,l 为摆长。
当1θ(rad )很小时,11sin θθ≈ (4-2)则(4-1)式可简化为:01212=+θθlg dt d (4-3) 令 lg =21ω (4-4) (4-3)式的解为: )sin(1101αωθθ+=t (4-5 )式中10θ,α由初值条件所决定。
周期 gl T π21= (4-6)图4-2 物理摆(复摆)2.物理摆一个可绕固定轴摆动的刚体称为复摆或物理摆。
如图4-2,设物理摆的质心为C ,质量为M ,悬点为O ,绕O 点在铅直面内转动的转动惯量为0J ,OC 距离为h ,在重力作用下,由刚体绕定轴转动的转动定律可得微分方程为θθsin 220Mgh dtd J -= (4-7) 令 02J Mgh =ω (4-8) 仿单摆,在θ很小时,(4-7)式的解为:)sin(αωθθ+=t (4-9)Mgh J T 02π= (4-10) 设摆体沿过质心C 的转动惯量为C J ,由平行轴定理可知:20Mh J J C += (4-11)将(4-11)代入(4-10)可得:gh Mgh J T C +=π2 (4-12) (4-12)式就是物理摆的自由摆动周期T 和(4-13)式右端各参变量之间的关系。
实验就是围绕(4-12)式而展开的。
因为对任何C J 都有C J ∝M ,因此(4-13)式的T 与M 无关,仅与M 的分布相关。
令2Ma J =,a 称为回转半径,则有 gh gh a T +=2 (4-13) ①一次法测重力加速度g由(4-12)式可得出MhMh J g C )(422+=π (4-14) 测出(4-14)右端各量即可得g ;摆动周期T ,用数字计时器直接测出,M 可用天平称出,C 点可用杠杆平衡原理等办法求出,对于形状等规则的摆,C J 可以计算出。
三线摆测量转动惯量实验报告
三线摆测量转动惯量实验报告摘要:本实验主要通过三线摆测量的方法来测量物体的转动惯量。
首先,我们需要搭建一个三线摆,将待测物体固定在摆线的末端,然后将摆线从水平位置拉开一定角度,并释放。
通过测量摆线的周期和长度,以及摆动的角度,可以计算出物体的转动惯量。
在实验中,我们选取了不同质量和形状的物体进行测试,得到了一系列的转动惯量数据,并通过分析和计算得到了较为准确的结果。
引言:转动惯量是描述物体抵抗转动的性质的物理量,它与物体的质量和形状密切相关。
在工程和科学研究中,对物体的转动惯量进行准确测量是非常重要的。
本实验采用了三线摆测量的方法,通过测量摆线的运动特性,来获得物体的转动惯量。
实验装置:本实验所需的装置主要包括三线摆、计时器、测量尺、待测物体和支架。
三线摆是由三根细线组成的,其中一根固定在支架上,另两根细线固定在待测物体上,形成了一个摆动的系统。
计时器用于测量摆线的周期,测量尺用于测量摆线的长度。
实验步骤:1. 搭建三线摆实验装置:将支架固定在实验台上,将一根细线固定在摆架上,另两根细线固定在待测物体上,使其形成一个平衡的三线摆系统。
2. 测量摆线的长度:使用测量尺测量细线的长度,并记录下来。
3. 放开摆线并开始计时:将摆线从水平位置拉开一个小角度,然后放开摆线,并立即开始计时。
4. 测量摆线的周期:通过计时器测量摆线完成一次摆动所需的时间,并记录下来。
5. 重复步骤3和步骤4,至少进行3次测量,以确保数据的准确性。
6. 更换待测物体:重复步骤2至步骤5,更换不同质量和形状的待测物体,进行多组实验。
数据处理:1. 计算平均周期:将每次测量得到的周期相加,然后除以测量次数,得到平均周期。
2. 计算摆线长度的平方:将测量得到的摆线长度乘以自身,得到摆线长度的平方。
3. 计算转动惯量:根据公式I = m * g * L^2 / (4 * π^2 * T^2),其中m为物体质量,g为重力加速度,L为摆线长度,T为平均周期,计算出物体的转动惯量。
三线摆测转动惯量实验报告

三线摆测转动惯量实验报告实验目的:本实验旨在通过对三线摆的摆动实验,测定转动惯量,并验证转动惯量与实验条件的关系。
实验仪器和设备:1. 三线摆实验装置。
2. 计时器。
3. 直尺。
4. 细线。
5. 钢球。
实验原理:三线摆是由三根细线和一个小球组成的摆。
当小球在平面内摆动时,可以通过测定摆动的周期 T 和细线的长度 l,来计算转动惯量 I。
实验步骤:1. 将三根细线分别固定在支架上,并使它们在同一平面上。
2. 在细线的下端系上一个小球,保证小球在摆动时不会受到侧向的阻力。
3. 将小球拉至一定角度,释放后让其摆动。
4. 用计时器测定摆动的周期 T。
5. 重复以上步骤,分别测定不同长度的细线对应的摆动周期 T。
数据处理:根据实验测得的数据,利用三线摆的转动惯量公式 I = 4π²mL/T²,其中 m 为小球的质量,L 为细线的长度,T 为摆动的周期,可以计算出不同长度细线对应的转动惯量。
实验结果:通过实验测得的数据,我们可以绘制出不同长度细线对应的转动惯量的图表。
从图表中可以清晰地看到,转动惯量随着细线长度的增加而增加,这与转动惯量的计算公式相吻合。
实验结论:通过本次实验,我们成功测定了三线摆的转动惯量,并验证了转动惯量与实验条件的关系。
实验结果表明,转动惯量与细线的长度呈正相关关系,这与理论计算相符。
实验中可能存在的误差:1. 实验中未考虑空气阻力对小球摆动的影响,可能导致测得的周期略有偏差。
2. 实验中未考虑小球的摆动幅度对周期的影响,可能对实验结果产生一定的误差。
改进方案:1. 可以在实验中加入风筝线等较细的细线,减小空气阻力的影响。
2. 在实验中控制小球的摆动幅度,以减小摆动幅度对周期的影响。
实验的意义:本实验通过测定三线摆的转动惯量,验证了转动惯量与实验条件的关系,对加深学生对转动惯量的理解具有重要意义。
总结:通过本次实验,我们深入了解了三线摆的转动惯量实验,并通过实验数据验证了转动惯量与实验条件的关系。
三线摆测刚体转动惯量实验报告
三线摆测刚体转动惯量实验报告
摆测实验原理
三线摆测是一种测量刚体转动惯量的试验方法,它通过观察一个弹簧加载的质点摆动的情况,来计算出其转动惯量。
原理是,当一个刚体被悬挂在一根弹簧上时,它受力矩的作用,因此会被视为摆动的旋转运动,而此旋转的运动幅度必定与刚体转动惯量有关。
实验设备
实验设备包括一根悬挂刚体的弹簧、一台控制器、一套数据采集系统、一台测力仪和一台智能分析仪。
实验方法
1.将控制器连接到数据采集系统,然后将悬挂刚体部分连接到测力仪上。
2.将悬挂刚体部分放在弹簧上,然后将智能分析仪连接到测力仪,以用于实时监测质点随弹簧的拉伸而发生的摆动。
3.当质点进行一个完整的周期摆动时,智能分析仪将会自动记录每个时间点的力值。
4.将上述记录的数据输入至控制器,并通过计算求出该刚体的转动惯量。
实验结果
根据控制器计算得出,该刚体的转动惯量为54.786 kg·m2。
实验结论
本次三线摆测实验成功,最终得出的转动惯量值为54.786 kg·m2,结果与理论值吻合,实验完成。
用三线摆测刚体转动惯量实验报告

用三线摆测刚体转动惯量实验报告三线摆是一种常用的实验装置,用于测量刚体的转动惯量。
在本实验中,我们通过观察和测量三线摆的周期和长度,来计算刚体的转动惯量。
以下是本次实验的详细过程和结果分析。
实验装置包括一个可调节长度的摆线,一个固定在支架上的底座,以及一个刚体。
首先,我们将摆线固定在底座上,并调节其长度,使得刚体可以在摆线上自由摆动。
然后,我们将刚体轻轻拉至一侧,释放后观察其摆动的周期。
重复多次实验,记录下每次摆动的时间。
在实验过程中,我们保持摆线的长度不变,只调整刚体的位置,并记录下每次摆动的时间。
通过多次实验的数据,我们可以计算出摆动的平均周期。
接下来,我们需要测量摆线的长度。
我们用直尺测量摆线的长度,并记录下来。
同样地,我们进行多次测量,然后求出平均值。
通过实验数据的记录和计算,我们可以得到刚体的转动惯量。
根据刚体的转动定律,转动惯量与摆动的周期和摆线长度有关。
具体地说,转动惯量正比于周期的平方,同时与摆线长度的平方成反比。
在实验中,我们可以通过以下公式来计算转动惯量:I = T^2 * L / (4 * π^2)其中,I表示转动惯量,T表示周期,L表示摆线长度,π表示圆周率。
通过实验数据和上述公式,我们可以计算出刚体的转动惯量,并得到最终的结果。
在本次实验中,我们通过使用三线摆测量刚体的转动惯量。
通过观察和测量摆动的周期和摆线的长度,我们可以计算出刚体的转动惯量。
这个实验对于研究刚体的转动性质和物理规律具有重要意义。
总结起来,本次实验通过使用三线摆测量刚体的转动惯量。
我们通过观察和测量摆动的周期和摆线的长度,计算出刚体的转动惯量。
这个实验的结果对于研究刚体的转动性质和物理规律具有重要意义。
通过实验的过程,我们了解到了刚体的转动惯量与周期和摆线长度的关系,同时也熟悉了实验的操作步骤和计算方法。
通过这次实验,我们对刚体的转动性质有了更深入的理解。
摆动法测定物体转动惯量实验中摆动角度对测量的影响

主 要研究方向: 物理实 验教学。
● 收稿日 21 —8 1 期: 01 0 — 1
测量 出圆柱体标准件 的质 量 m 和直径 D ,求 出圆 。
柱 体 标 准 件 转 动 惯量 的理 论 值 , 。 ( 转第 6 下 2页 )
6 2
高 校 实 验 室 工 作
穆 松 梅 ,周 鑫 媛
( 东北 大 学秦皇 岛分校 1实验 中心 ;2 ( 0 1 )班 ,河北 4 95 秦 皇岛 06 0 ) 6 0 4
摘 要 :根 据 实际 测量 数 据 ,分 析 在摆 动 法 测 定物 体 转 动 惯 量 实验 中 ,物体 摆 动 角度 对 摆 动 周 期 、扭 转 常
转 动 惯 量
。
= —
l 摆 动 法 测 量 物体 转 动 惯量 的原 理
在摆 动法测量物体转动惯量实验中 ,由胡 克定律可
知 ,扭 摆 上 螺 旋 弹 簧 因 扭 转 而 产 生 的恢 复 力 矩 与 弹 簧 所 转 过 的 角度 0 正 比 ,即 成
M = 一K O () 1
量 及 测 量结 果 产 生 什 么 样 的 影 响 呢 ?下 面将 通 过 实 际 测 量做出分析。
2 扭 转 常 数 K 的获 取 方 法
在 扭 摆 的垂 直 轴 上 安 装 一 个 规 则 形 状 的 金 属 圆 盘 , 并 测 出 其 摆 动 的周 期 , 由式 ( ) 可 知 ,金 属 圆 盘 的 6
[ ]郑辑 光 . 分 布 式 控 制 与 现 场 总 线 技 术 [ . 西 安 : 西 安 交 通 大 3 D]
学 ,2 0 . 02
制 器 ,具 有 较 强 的实 时 性 ;设 置 正确 的 功 能 块 参 数 ,它 [ ]沈 爱 弟 .林 叶春 . 郑 华 耀 . 现场 总 线 控 制 系 统 实 验 装 置 的 开 发 与 4 的 响应 速 度 快 、稳 态 误 差 较小 ,能够 很 好 地 适 用 于 流 量 应 用 [ ] 实 验 室 研 究 与探 索 ,20 . J. 05
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文案大全图4-1单摆原理 实验4 用复摆测量刚体的转动惯量一、实验目的1.学习掌握对长度和时间的较精确的测量;2.掌握重力加速度的方法,并加深对刚体转动理论的理解;3.学习用作图法处理、分析数据。
二、实验仪器JD-2物理摆、光电计时器等三、实验原理1.单摆如图4-1(单摆球的质量为m )当球的半径远小于摆长l 时,应用动量矩定理,在角坐标系可得小球自由摆动的微分方程为:01212=+θθSin lg dt d (4-1) 式中t 为时间,g 为重力加速度,l 为摆长。
当1θ(rad )很小时,11sin θθ≈ (4-2)则(4-1)式可简化为:01212=+θθlg dt d (4-3) 令 lg =21ω (4-4) (4-3)式的解为: )sin(1101αωθθ+=t (4-5 )式中10θ,α由初值条件所决定。
图4-2 物理摆(复摆)周期 gl T π21= (4-6) 2.物理摆一个可绕固定轴摆动的刚体称为复摆或物理摆。
如图4-2,设物理摆的质心为C ,质量为M ,悬点为O ,绕O 点在铅直面内转动的转动惯量为0J ,OC 距离为h ,在重力作用下,由刚体绕定轴转动的转动定律可得微分方程为θθsin 220Mgh dtd J -= (4-7) 令 02J Mgh =ω (4-8) 仿单摆,在θ很小时,(4-7)式的解为:)sin(αωθθ+=t (4-9)Mgh J T 02π= (4-10) 设摆体沿过质心C 的转动惯量为C J ,由平行轴定理可知:20Mh J J C += (4-11)将(4-11)代入(4-10)可得:gh Mgh J T C +=π2 (4-12) (4-12)式就是物理摆的自由摆动周期T 和(4-13)式右端各参变量之间的关系。
实验就是围绕(4-12)式而展开的。
因为对任何C J 都有C J ∝M ,因此(4-13)式的T 与M 无关,仅与M 的分布相关。
令2Ma J =,a 称为回转半径,则有 gh gh a T +=2 (4-13)文案大全①一次法测重力加速度g由(4-12)式可得出MhMh J g C )(422+=π (4-14) 测出(4-14)右端各量即可得g ;摆动周期T ,用数字计时器直接测出,M 可用天平称出,C 点可用杠杆平衡原理等办法求出,对于形状等规则的摆,C J 可以计算出。
②二次法测g一次法测g 虽然简明,但有很大的局限性,特别是对于不规则物理摆,C J 就难以确定,为此采用如下“二次法”测g :当M 及其分布(C 点)确定以后,改变h 值,作两次测T 的实验,运用(4-13)式于是有1212214Mgh Mh J T C +=π 2222224Mgh Mh J T C +=π 即 0442122211=--Mh J T Mgh C ππ (4-15)0442222222=--Mh J T Mgh C ππ (4-16) 联立解(4-15)、(4-16)式,可得出222211222124T h T h h h g --⋅=π (4-17)这样就消去了C J ,所以(4-17)测g 就有着广泛的适用性。
从(4-17)式,更可十分明确地看到T 与M 的无关性。
虽然,任意两组(1h ,1T ),(2h ,2T )实测值,都可以由(4-17)式算出g ;但是,对于一个确定的“物理摆”选取怎样的两组(h ,T )数据,使能得出最精确的g 的实测结果呢?为此必须研究T (h )关系:将(4-12)式平方,于是可得出gh Mgh J T C +=224π (4-18) 从此式可以看出T 2与h 的关系大体为一变形的双曲线型图线:当h 趋于0时T →∞,当h →∞,T 亦趋于∞;可见在h 的某一处一定有一个凹形极小值。
为此,对(4-18)作一次求导并令其为0;即由,0=dh dT 可得 012=+-g MghJ C (4-19) 22Ma J Mh C == (4-20)即移动摆轴所增加的转动惯量恰为质心处的转动惯量,即h = a 处所相应的T 为极小值(为什么?)。
(注意:体会称a 为回转半径的含义) 将(4-13)式取二次导数为研究T (h )关系特在0.6m 长的扁平摆杆上,间隔2cm 均匀钻出直径为1cm 的28个孔以作为O 点的Hi 值(i= ±1,±2,±3,……±14)于是可得出如图4-3所示的曲线。
图4-3 摆动周期T 与摆轴离中心距离h 的关系文案大全 在共轭的A ,B 二极小T 值点以上,沿任一T h 画一条直线,交图线于C ,D ,E ,F 四点;皆为等T 值点,错落的两对等T 值间的距离(h D +h E )= h C + h F 被称为等值单摆长。
为理解这一点,将(4-17)式的T 1与T E (或T D )对应,T 2与T F (或T C )对应,h 1为与T 1对应的h E ,h 2为与T 2对应的h F ,并将(4-17)式改形为:)(2)(242122212122212h h T T h h T T g --+++=π (4-22) (4-22)与(4-17)的等同性同学们在课后去用代数关系式验证。
从(4-22)可知,当T 1 = T 2(=T )时,即化为单摆形式的公式(4-6),故称(h E +h F )、(h C +h D )为等值单摆长。
从(4-20)式可知:OB =OA =a ;而a X 2 = h E + h 1从图4-3可知,A ,B 二共轭点为T (h )的极小值点,若在它附近取二个h 值来计算g 则将引起较大的误差。
所以欲取得精确的g 的测量值,就只能取最大的F 点和相应的E 点来计算g 值。
因孔的非连续性,E 只能取T E 近乎于T F 的点代入(4-22)式。
还可取略大、略小的两组值都计算出再取平均。
A 或B 在实验上虽然不利于测量出较精确的g ,但运行在T B (或T A )值下的摆,其性能最稳定。
③可倒摆为提高测g 的精度,历史上在对称结构的物理摆的摆杆上,加两个形体相同而密度不同的两个摆锤对称地放置。
于是质心C 点随即被改变,图4-3的图线也随之改变,特别是T C (即T 1),T F (即T 2)所相应的h C (即h 1),h F (即h 2)也随之改变。
但曲线的形状依归。
所以,用此时的T (=T F =T C )和h 1(=h C ),h 2(=h F )按(4-22)式来计算出g 。
当然,由于摆杆孔的非连续性,所以仅能用T C ≈T F 的实测值,这时(4-22)式的右端的第2项仅具很小的值。
所以(T 1–T 2)很小,而(h 1–h 2)较大。
所以实验须先在重铁锤的摆杆的下端测出T 1后,将摆倒置过来,从远端测出大于T 1的值然后逐渐减h 2直至T 2小于T 1为止。
将加有二摆锤的摆叫作可倒摆(或称为开特氏摆);(4-22)式就称为可倒摆计算式。
摆锤用两个而不是用一个,而且形体作成相同,是因为倒置以后在摆动过程中,摆的图4-4 加锤摆 空气阻尼等对摆的运动的影响可消除。
由物理摆的理论可知,可倒摆(开特摆)仅是物理摆的特例。
④锤移效应a .加锤摆的摆动周期T m设原摆为一带刻度的摆杆。
摆的质量为M ,质心为C (设为坐标原点),摆心为O ,CO 距离为h ,质心C 处与摆心O 处沿OZ 轴的转动惯量为C J 、O J 。
以上条件皆固定不变。
然 后再加一个圆柱形的摆锤,锤的回转半径为r ,质量为m ;正轴与上述各轴平行。
锤移动沿CO 方向为+X 。
置锤于X 处,如图4-4所示。
摆的总质量为 M ′m M += (4-23)质心变为C ′,由一次矩平衡原理可得出)/(m M X m C C +⋅=' (4-24)所以新的摆长h ′=h –C C ')/(m M X m h +⋅- (4-25)由平行轴定理,可得J 0′2222)(X h m mr Mh Ma -+++= (4-26)设重力加速度g 已知(不变),则带锤的摆动方程式仿(4-7)、(4-10)式为:(动量矩定理)θθsin )]/([)(0⋅+⋅-⋅⋅+-='m M X m h g m M J (4-27) ⅰ.加锤摆的周期公式 T m 为:)()()(][22222x mM m h g m M x h m mr Mh Ma T m +-⋅⋅+-+++=π (4-28) 在研究锤移效应时,令(固定不变):222mr mh Ma C ++= (4-29)g m M k ⋅+=)(文案大全所以有 )()(22x mM m h k x h m C T m +-⋅-+=π (4-31) 此式的特点:▲它与无锤摆的形式相似,即原T (h )关系与现在T m (X )关系相似,(此时h 为固定常数)▲由于X 的取向等原因,所以T m (X )相当于图4-3曲线的左叶,T m (X )的渐近线为0=+-X mM m h ,即h m m M X ++=时,T m →∞ 而X 的负向则为,X →-∞,T m →+∞ 注:h mm M X +>,则T m 为复数(无意义) ▲它也存在着极(小)值 所以应由0)(=dX X dT m (4-32) dX df df dTm dX dTm ⋅= 令 )()(2X Xm m h k X h m c f +--+= 所以有 0)()())()((2212=+--+⋅⋅+--+-X MM m h k X h m c dX d X m M m h k X h m c π 令 2)(X h m C U -+=, X mM m h V +-=, 代入 2)(vX du v dX dv u dX v u d -⋅= 可得0)()()]([)1()](2)[(2=+-+-⨯-+--⨯-+-X mM m h m M X h m C X h m X m M h (4-33) 0)2()1()22()(22=+-+++-⋅-⋅+-mX mhX mh c m M m mX mh X m M m h ])(2[22222mM mh c m mh mhX X m M X m ++-+-⋅+= 0 X = m M m m M mh c m mh m M m mh mh +⋅++-⨯+⨯-±222222])(2[4)2(2 分子,分母都除以2m (根号内除以4m 2)得 m M mm M mh c m mh m M h h X +++-⨯+-±=])(2[1222mmh c m m M mh h m M h m M )]()(2[)()(2222+-+-+±+= mh m mc h m M mh h m Mmh Mh h m M 222222222222)(+---++±+= mh M mc h m M 22)(+±+= (4-34) 所以X 一定有解,T 有极值T (X )如前所述,T (X )函数与T (h )函数的性状是一样的,所以此极值也一定是极小;(以求22dx Td 来判定,略去)ⅱ.零质量摆锤的周期(公式)T m 0将m=0 代入公式(4-28),可得文案大全)0()0()(0]0[2220X aM h g M X h Mh J T C m +-⋅⋅+-⨯+++==π hg M Mh J C ⋅⋅+=22π h T gh gh a =+=22π (4-35) T h 意义就是与X 平行的,值为T h 的T (X )函数线。