点阵屏驱动程序(MAX7219)
Arduino驱动MAX7219四位数码管显示时间
Arduino驱动MAX7219四位数码管显示时间Arduino驱动MAX7219四位数码管显示时间默认使用Pin 2为MOSI(数据发送)引脚,Pin 3为CS(片选)引脚,Pin 4为SCLK(时钟)引脚,如有需要请修改代码前三行的define。
#define MO 2#define CS 3#define CLK 4static int time_h = 21, time_m =25, time_s = 30; //此刻时间:时,分,秒int alarm_clock_h = 8, alarm_clock_m = 00; //闹钟时间unsigned long time = 0;unsigned char buffer_led[5] = { 0x00,};//缓存void SPI_init(void) //初始化SPI引脚{pinMode(CLK, OUTPUT);pinMode(MO, OUTPUT);pinMode(CS, OUTPUT);digitalWrite(CS, HIGH);digitalWrite(CLK, LOW);digitalWrite(MO, HIGH);}void SPI_send(unsigned char reg, unsigned char data) //spi 单向16位数据发送{int x;/*Serial.print("reg = ");Serial.print(reg, HEX);Serial.print(" data = ");Serial.println(data, HEX);*/digitalWrite(CS, LOW);for (x = 0; x < 8; x++){digitalWrite(MO, 0x80 & (reg << x)); //高位在前digitalWrite(CLK, HIGH);digitalWrite(CLK, LOW);}for (x = 0; x < 8; x++){digitalWrite(MO, 0x80 & (data << x)); //高位在前digitalWrite(CLK, HIGH);digitalWrite(CLK, LOW);}digitalWrite(CS, HIGH);}void lcd_init(void)//初始化Max7219配置{SPI_send(0x0b, 0x07); //scan-limitSPI_send(0x09, 0xff); //decode mode allSPI_send(0x0c, 0x01); //shutdown offSPI_send(0x0f, 0x00); //off display testSPI_send(0x0a, 0x04); //intensitydelay(100);}void clear(void)//清除显示{for (int i = 1; i <= 8; i++){SPI_send(i, 0x0F);}}void led_display(void)//显示时间{char cache = 0x00;if ((time_h / 10) == 0)buffer_led[0] = 0x00;else buffer_led[0] = time_h / 10;buffer_led[1] = time_h % 10 | 0x01;buffer_led[2] = time_m / 10;buffer_led[3] = time_m % 10;SPI_send(8, buffer_led[0]);SPI_send(7, buffer_led[1]);SPI_send(6, 0x0a);SPI_send(5, buffer_led[2]);SPI_send(4, buffer_led[3]);SPI_send(3, 0x0a);SPI_send(2, time_s / 10);SPI_send(1, time_s % 10);}void get_time()//获取时间并更新显示{static char ss = 1;static unsigned long time_cc = 0;if ((millis() - time_cc) > 1000 | millis() < 150)//秒{if (millis() <= 200) //若系统计时器溢出时时间,time_cc重计{time_cc = millis();time_s ++;delay(150);}else if (millis() > 200)//秒{time_s += (millis() - time_cc) / 1000;// time_cc = millis()-990; //时间快进time_cc = millis();buffer_led[4] = (0x01 & ss) << 5;ss = ~ss;}if (time_s > 59) //分{if (time_s - 60 > 1)//如果有延时间隔导致秒钟大于60秒,进行分钟缺失补偿 {time_m += time_s / 60;if (time_s % 60 == 0)time_m--;time_s = time_s - (time_s / 60) * 60;}else time_s = 0;time_m++;buffer_led[4] = 0x80;if (time_m > 59)//时{time_h++;time_m = (time_m - 60);buffer_led[4] = 0xf0;}if (time_h > 23){time_h = 0;time_s += 5; //时间误差补偿}}// Serial.print("millis="); // Serial.print(time_cc);// Serial.print(" time="); // Serial.print(time_h);// Serial.print(":");// Serial.print(time_m);// Serial.print(":");// Serial.println(time_s); led_display();//刷新数码管显示}}void setup(){Serial.begin(9600);SPI_init();lcd_init();clear();}void loop(){get_time();}。
MAX7219中文资料-附有程序

MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。
它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX7219的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。
此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。
MAX7219的外部引脚分配如图1所示及内部结构如图2所示。
图1 MAX7219的外部引脚分配
图2 MAX7219的内部引脚分配
各引脚的功能为:
DIN:串行数据输入端
DOUT:串行数据输出端,用于级连扩展
LOAD:装载数据输入
CLK:串行时钟输入
DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流SEG A~SEG G DP 7段驱动和小数点驱动ISET:通过一个10k电阻和Vcc相连,设置段电流MAX7219有下列几组寄存器:(如图3)。
MAX7219单片以及级联驱动程序

MAX7219单片以及级联驱动程序2011-03-20 09:40说明一下:这个word版式是从百度上下载的,在原版中,作者只是写了驱动一片MAX7219的程序。
本人作为菜鸟,第一次使用MAX7219就用了两片级联来驱动15个数码管,按照原版程序驱动一片MAX7219是没有问题的,但是,驱动两片MAX7219就不行了。
自己先认真看了MAX7219的DataSsheet,因为英语是个二把刀,看的迷迷糊糊,似懂非懂(可见英语还是很重要的),又在网上搜索也没发现有正确的程序(都是有点儿问题,上网贴出来请教各位大虾的),没办法只能自力更生了,终于调出来了。
将原版增删修改,传上来共享,希望对以后某位菜鸟第一次使用MAX7219时有所帮助啦,嘿嘿!/**************************************************************** *常用符号定义******************************************************************/#define uchar unsigned char/**************************************************************** *定义MAX7219寄存器******************************************************************/#define REG_NO_OP 0x00 //定义空操作register#define DIG_1 0x01 // 定义数码管1 register#define DIG_2 0x02 // 定义数码管2 register#define DIG_3 0x03 // 定义数码管3 register#define DIG_4 0x04 // 定义数码管4 register#define DIG_5 0x05 // 定义数码管5 register#define DIG_6 0x06 // 定义数码管6 register#define DIG_7 0x07 // 定义数码管7 register#define DIG_8 0x08 // 定义数码管8 register#define REG_DECODE 0x09 // 定义解码控制register#define REG_INTENSITY 0x0a // 定义显示亮度register#define REG_SCAN_LIMIT 0x0b // 定义扫描限制register#define REG_SHUTDOWN 0x0c // 定义"shutdown"模式register#define REG_DISPLAY_TEST 0x0f // 定义"display test"模式register#define INTENSITY_MIN 0x00 // 定义最低显示亮度#define INTENSITY_MAX 0x0f // 定义最高显示亮度/****************************************************************** * 定义硬件引脚连接******************************************************************/#define DATA P2^3; //定义P3_5连接MAX7219 DATA引脚#define CLK P2^5; //定义P3_4连接MAX7219 CLK 引脚#define CS P2^4; //定义P3_3连接MAX7219 CS 引脚/***************************************************************** * 共阴极七段数码管显示对应段查询表(数字0-9分别对应code_table[0]-[9])***********************************************************/uchar code code_table[10]={0x7e,0x30,0x6d,0x79,0x33,0x5b,0x5f,0x70,0x7f,0x7b}; /*采用数组*//****************************************************************** * MAX7219_Send()描述: 向MAX7219传送一字节数据Arguments : dataout = data to sendReturns : none******************************************************************/ void send (uchar datain){char I,temp;for (i=8; i>0; i--){CLK=0; // CLK 置低temp=datain&0x80;if (temp==0x80) // 判断并输出一位DATA=1; // 输出"1"else // 或DATA=0; // 输出"0"datain<<=1; //datain左移位,以便再次与0x80按位与CLK=1; // CLK 置高}}/**************************************************************** * MAX7219_Write()/MAX7219_Write_1()描述: 向 MAX7219 写命令Arguments : reg_number = register to write todataout = data to write to MAX7219Returns : none************************************************************** */ void MAX7219_Write (uchar add1, uchar dat1) //向第一片MAX7219写数据{CS=0; // CS置低选通MAX7219send(add1); // 写register number 到MAX7219send(dat1); // 写data 到MAX7219CS=1; // 利用CS上升沿锁存以上移位进输入的16位数据}void MAX7219_Write_1(uchar add2,uchar dat2) //向第二片MAX7219写数据{CS=0;sent(add2);sent(dat2);CLK=1; // 第16.5个时钟周期,数据从第一片MAX7219的DOUT端开始输出sent(REG_NO_OP); //对第一片MAX7219进行空操作,sent(0x00);CS=1;}/******************************************************************** MAX7219_DisplayChar()描述: 使某一位显示一个数字Arguments : digit = digit number (0-7)character = character to display (0-9, A-Z)Returns : none****************************************************************/void MAX7219_DisplayChar (char digit, char character){MAX7219_Write(digit, character);}PS:这个函数可以不要,直接调用写数据函数就可以了(原版)/******************************************************************** MAX7219_Clear()/MAX7219_clear_1()描述: 清除所有位的显示Arguments : noneReturns : none*****************************************************************/ void MAX7219_Clear (){uchar i;for (i=0; i < 8; i++)MAX7219_Write(i, 0x00); // 清除第一片MAX7219所有位的显示}void MAX7219_Clear_1(){uchar i;for(i=1;i<=8;i++)MAX7219_Write_1(i,0x00); //清除第二片MAX7219所有位的显示}PS:可以两片一起清楚数据,但建议分开较好。
max7219驱动程序。doc
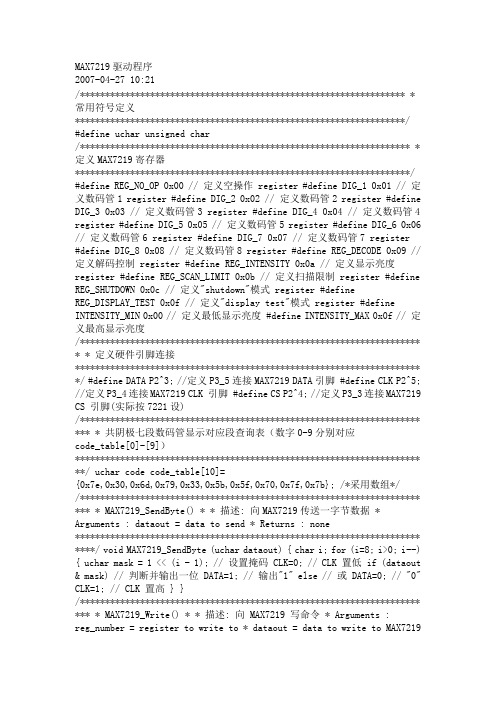
MAX7219驱动程序2007-04-27 10:21/***************************************************************** * 常用符号定义******************************************************************/#define uchar unsigned char/****************************************************************** * 定义MAX7219寄存器*******************************************************************/ #define REG_NO_OP 0x00 // 定义空操作 register #define DIG_1 0x01 // 定义数码管1 register #define DIG_2 0x02 // 定义数码管2 register #define DIG_3 0x03 // 定义数码管3 register #define DIG_4 0x04 // 定义数码管4 register #define DIG_5 0x05 // 定义数码管5 register #define DIG_6 0x06 // 定义数码管6 register #define DIG_7 0x07 // 定义数码管7 register#define DIG_8 0x08 // 定义数码管8 register #define REG_DECODE 0x09 // 定义解码控制 register #define REG_INTENSITY 0x0a // 定义显示亮度register #define REG_SCAN_LIMIT 0x0b // 定义扫描限制 register #define REG_SHUTDOWN 0x0c // 定义"shutdown"模式 register #defineREG_DISPLAY_TEST 0x0f // 定义"display test"模式 register #define INTENSITY_MIN 0x00 // 定义最低显示亮度 #define INTENSITY_MAX 0x0f // 定义最高显示亮度/******************************************************************** * * 定义硬件引脚连接********************************************************************* */ #define DATA P2^3; //定义P3_5连接MAX7219 DATA引脚 #define CLK P2^5; //定义P3_4连接MAX7219 CLK 引脚 #define CS P2^4; //定义P3_3连接MAX7219 CS 引脚(实际按7221设)/******************************************************************** *** * 共阴极七段数码管显示对应段查询表(数字0-9分别对应code_table[0]-[9])********************************************************************* **/ uchar code code_table[10]={0x7e,0x30,0x6d,0x79,0x33,0x5b,0x5f,0x70,0x7f,0x7b}; /*采用数组*//******************************************************************** *** * MAX7219_SendByte() * * 描述: 向MAX7219传送一字节数据 * Arguments : dataout = data to send * Returns : none********************************************************************* ****/ void MAX7219_SendByte (uchar dataout) { char i; for (i=8; i>0; i--) { uchar mask = 1 << (i - 1); // 设置掩码 CLK=0; // CLK 置低 if (dataout & mask) // 判断并输出一位 DATA=1; // 输出"1" else // 或 DATA=0; // "0" CLK=1; // CLK 置高 } }/******************************************************************** *** * MAX7219_Write() * * 描述: 向 MAX7219 写命令 * Arguments :reg_number = register to write to * dataout = data to write to MAX7219* Returns : none********************************************************************* ****** */ void MAX7219_Write (uchar reg_number, uchar dataout) { CS=0; // CS置低选通 MAX7219 MAX7219_SendByte(reg_number); // 写 register number 到 MAX7219 MAX7219_SendByte(dataout); // 写 data 到 MAX7219 CS=1; // 利用CS上升沿锁存以上移位进输入的16位数据 }/******************************************************************** ****** * MAX7219_DisplayChar() * * 描述: 使某一位显示一个数字 * Arguments : digit = digit number (0-7) * character = character to display (0-9, A-Z) * Returns : none********************************************************************* *****/ void MAX7219_DisplayChar (char digit, char character){ MAX7219_Write(digit, character); }/******************************************************************** ****** * MAX7219_Clear() * * 描述: 清除所有位的显示 * Arguments : none * Returns : none********************************************************************* ******/ void MAX7219_Clear (void) { uchar i; for (i=0; i < 8; i++) MAX7219_Write(i, 0x00); // 清除所有位的显示 }/******************************************************************** ****** * MAX7219_SetBrightness() * * 描述: 设置数码管显示亮度 * Arguments : brightness (0-15) * Returns : none********************************************************************* ******/ void MAX7219_SetBrightness (char brightness) { brightness &= 0x0f; // 屏蔽高位字节 MAX7219_Write(REG_INTENSITY, brightness); // 设置数码管显示亮度 }/******************************************************************** ****** * MAX7219_DisplayTestStart() * * 描述: 进入 test 模式 * Arguments : none * Returns : none********************************************************************* ******/ void MAX7219_DisplayTestStart (void){ MAX7219_Write(REG_DISPLAY_TEST, 1); // 置 MAX7219 为 test 模式 }/******************************************************************** ****** * MAX7219_DisplayTestStop() * * 描述: 退出 test 模式 * Arguments : none * Returns : none********************************************************************* ******/ void MAX7219_DisplayTestStop (void){ MAX7219_Write(REG_DISPLAY_TEST, 0); // 置 MAX7219 为正常显示模式 } /******************************************************************** ****** * MAX7219_ShutdownStart() * * 描述: 进入 shutdown 模式 * Arguments : none * Returns : none********************************************************************* ******/ void MAX7219_ShutdownStart (void) { MAX7219_Write(REG_SHUTDOWN, 0); // 置 MAX7219 为 shutdown 模式 }/******************************************************************** ****** * MAX7219_ShutdownStop() * * 描述: 退出 shutdown 模式 * Arguments : none * Returns : none********************************************************************* ******/ void MAX7219_ShutdownStop (void) { MAX7219_Write(REG_SHUTDOWN, 1); // 置 MAX7219 为正常显示模式 }/******************************************************************** ****** * MAX7219_Init() * * Des cription: MAX7219初始化模块; 应该先于其他MAX7219函数而被调用 * Arguments : none * Returns : none********************************************************************* ******/ void MAX7219_Init (void) { DATA=1; // 置DATA为1 CLK=1; // 置CLK 为1 CS=1; // 置CS 为1 MAX7219_Write(REG_SCAN_LIMIT, 7); // 设置为全显示 MAX7219_Write(REG_DECODE, 0x00); // 所有位设置为非解码方式MAX7219_ShutdownStop(); // 置 MAX7219 为正常显示模式 (非shutdown模式) MAX7219_DisplayTestStop(); // 置 MAX7219 为正常显示模式 (非test模式) MAX7219_Clear(); // 清除所有位的显示MAX7219_SetBrightness(INTENSITY_MAX); // 置最大亮度 }。
MAX7219工作原理简介

MAX7219工作原理简介MAX7219是一个采用3线串行接口的8位共阴极7段LED显示驱动器。
本文分析了MAX7219各个寄存器的功能,并结合MAX7219的工作时序,给出了MAX7219在Motorola MC68HC908单片机系统中的一个应用实例。
关键词: MCU;MAX7219;LED Motorola MC68HC908MAX7219工作时序及其寄存器MAX7219是一个高性能的多位LED显示驱动器,可同时驱动8位共阴极LED或64个独立的LED。
其内部结构框图如图1所示,主要包括移位寄存器、控制寄存器、译码器、数位与段驱动器以及亮度调节和多路扫描电路等。
MAX7219 采用串行接口方式,只需LOAD、DIN、CLK三个管脚便可实现数据传送。
DIN管脚上的16位串行数据包不受LOAD状态的影响,在每个CLK的上升沿被移入到内部16位移位寄存器中。
然后,在LOAD的上升沿数据被锁存到数字或控制寄存器中。
LOAD必须在第16个时钟上降沿或之后,但在下一个时钟上升沿之前变高,否则数据将会丢失。
DIN端的数据通过移位寄存器传送,并在16.5个时钟周期后出现在DOUT端,随CLK 的下降沿输出。
MAX7219的操作时序如图2所示。
MAX7219的串行数据标记为D15~D0,其中低8位表示显示数据本身,最高的4位D15~D12未使用,寻址内部寄存器的地址位占用D11~D8,选择14个内部寄存器,见表1。
图1 MAX7219内部结构框图图2 MAX7219的数据传送时序MAX7219 内部具有14个可寻址数字和控制寄存器。
其中的8个数字寄存器由一个片内8×8双端口SRAM实现。
它们可直接寻址,因此可对单个数进行更新并且通常只要 V+超过2V数据就可保留下去。
除8个数位寄存器之外,还有无操作、译码方式、亮度调整、扫描位数、睡眠模式和显示器测试6个控制寄存器。
无操作寄存器用于多片MAX7219级联,在不改变显示或不影响任意控制寄存器条件下,它允许数据从DIN传送到DOUT。
max7219驱动

//#define N_NOP _nop_();//_nop_();_nop_();
///////////////////////////////////////////////////////
//MAX7219
write_one_8279(Limit_addr,Set_Limit); //8位显示方式;
write_one_8279(Shutd_addr,Set_Shutd); //进入正常工作方式
}
void Init_7219(void)
{//MAX7219正常工作时的初始化;
////////////////////////////////////////////////////////////////////
//管脚,变量和常数定义;DEFINE
#define Model_addr 0x09 // X9 H
#define Bright_addr 0x0a // XA H
#define Set_Halt 0x00 //进入停机工作方式?
#define Set_Model 0xff //将BCD码译成B码;
#define Set_Bright 0x04 //占空比为15/32;
#define Set_Limit 0x07 //8位显示方式;
}
�
{
_nop_();
CLK=0; //-\_
if(addr & 0x80)
DIN=1;
else
DIN=0;
_nop_();
CLK=1; //_/-
addr=addr<<1;
MAX7219驱动单个8X8点阵LED模块
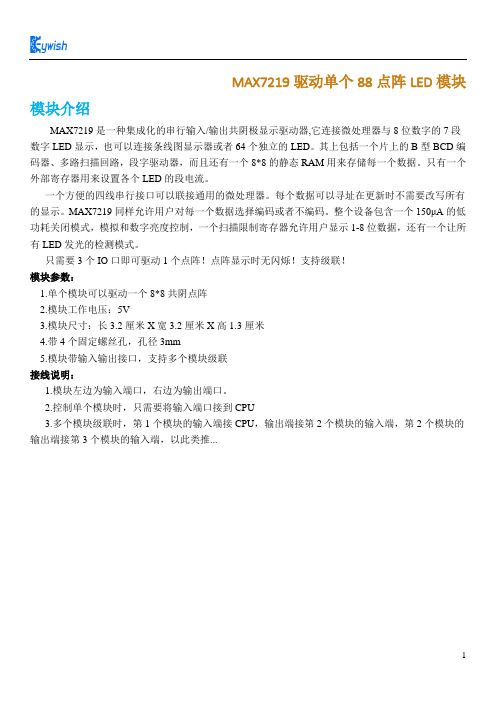
MAX7219驱动单个88点阵LED模块模块介绍MAX7219 是一种集成化的串行输入/输出共阴极显示驱动器,它连接微处理器与8位数字的7段数字LED显示,也可以连接条线图显示器或者64个独立的LED。
其上包括一个片上的B型BCD编码器、多路扫描回路,段字驱动器,而且还有一个8*8的静态RAM用来存储每一个数据。
只有一个外部寄存器用来设置各个LED的段电流。
一个方便的四线串行接口可以联接通用的微处理器。
每个数据可以寻址在更新时不需要改写所有的显示。
MAX7219同样允许用户对每一个数据选择编码或者不编码。
整个设备包含一个150μA的低功耗关闭模式,模拟和数字亮度控制,一个扫描限制寄存器允许用户显示1-8位数据,还有一个让所有LED发光的检测模式。
只需要3个IO口即可驱动1个点阵!点阵显示时无闪烁!支持级联!模块参数:1.单个模块可以驱动一个8*8共阴点阵2.模块工作电压:5V3.模块尺寸:长3.2厘米X宽3.2厘米X高1.3厘米4.带4个固定螺丝孔,孔径3mm5.模块带输入输出接口,支持多个模块级联接线说明:1.模块左边为输入端口,右边为输出端口。
2.控制单个模块时,只需要将输入端口接到CPU3.多个模块级联时,第1个模块的输入端接CPU,输出端接第2个模块的输入端,第2个模块的输出端接第3个模块的输入端,以此类推...器件列表◆Keywish Arduino Uno R3 主板*1◆USB 接口线*2◆MAX7219显示驱动器*1◆8位数字的7段数字LED显示*1◆跳线*4接线Arduino MAX7219显示驱动器VCC VCCGND GND5 CLK6 CS7 DIN程序#include "LedControl.h"int DIN =7;int CS =6;int CLK =5;byte e[8]={0x7C,0x7C,0x60,0x7C,0x7C,0x60,0x7C,0x7C};byte d[8]={0x78,0x7C,0x66,0x66,0x66,0x66,0x7C,0x78};byte u[8]={0x66,0x66,0x66,0x66,0x66,0x66,0x7E,0x7E};byte c[8]={0x7E,0x7E,0x60,0x60,0x60,0x60,0x7E,0x7E};byte eight[8]={0x7E,0x7E,0x66,0x7E,0x7E,0x66,0x7E,0x7E};byte s[8]={0x7E,0x7C,0x60,0x7C,0x3E,0x06,0x3E,0x7E};byte dot[8]={0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x18};byte o[8]={0x7E,0x7E,0x66,0x66,0x66,0x66,0x7E,0x7E};byte m[8]={0xE7,0xFF,0xFF,0xDB,0xDB,0xDB,0xC3,0xC3};LedControl lc=LedControl(DIN,CLK,CS,0);void setup(){lc.shutdown(0,false);//The MAX72XX is in power-saving mode on startup lc.setIntensity(0,15);// Set the brightness to maximum valuelc.clearDisplay(0);// and clear the display}void loop(){byte smile[8]={0x3C,0x42,0xA5,0x81,0xA5,0x99,0x42,0x3C};byte neutral[8]={0x3C,0x42,0xA5,0x81,0xBD,0x81,0x42,0x3C};byte frown[8]={0x3C,0x42,0xA5,0x81,0x99,0xA5,0x42,0x3C};printByte(smile);delay(1000);printByte(neutral);delay(1000);printByte(frown);delay(1000);printEduc8s();lc.clearDisplay(0);delay(1000);}void printEduc8s(){printByte(e);delay(1000);printByte(d);delay(1000);printByte(u);delay(1000);printByte(c);delay(1000);printByte(eight);delay(1000);printByte(s);delay(1000);printByte(dot);delay(1000);printByte(c);delay(1000);printByte(o);delay(1000);printByte(m);delay(1000);}void printByte(byte character []) {int i =0;for(i=0;i<8;i++){lc.setRow(0,i,character[i]); }}实验结果。
max7219数码管驱动程序库函数
函数说明:初始化MAX7219芯片,MAX7219芯片按照顺序级联,
测试模式显示寄存器没有配置,若希望配置,应在max7219.h中将MAX7219_TestModeDisp_EN预定义为1,
并注意配置测试模式显示的时间,
若时间太短,将较难看到显示效果。
输入参数:n-----初始化芯片个数(n>=1,注意:第1个为第0号芯片,显示函数中有具体描述;
for(i=0;i<8;i++);//短延时
MAX7219_LOAD=0;
for(i=0;i<n;i++)//初始化几个MAX7219芯片,做几次设置操作
MAX7219_WriteAddrData (0x09,MAX7219_InitStructure.DecodeMode);//设置译码模式
MAX7219_LOAD=1;//LOAD上升沿锁存数据
*/
//#define DecodeMode0x09 //译码模式寄存器
//#define Intensity0x0a //亮度寄存器
//#define ScanLimit0x0b //扫描位数寄存器
//#define ShutDown0x0c //关机模式寄存器
//#define DisplayTest0x0f //显示测试寄存器
sbit MAX7219_DIN= P0^3; //串行数据输入
sbit MAX7219_CLK= P0^4; //串行时钟
sbit MAX7219_LOAD= P0^5; //显示数据锁存控制
/*****************************************************************
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
}
}
void Display_4(uchar dat)
{
uchar i;
{0x00,0x70,0x88,0x80,0x80,0x80,0x88,0x70},//C16
};
//--------------------------------------------
//功能:向MAX7219(U3)写入字节
//入口参数:DATA
//出口参数:无
//说明:
void Write_Max7219_byte(uchar DATA)
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
Write_Max7219(7,0);//清除缓冲区数据,消除显示误差
Write_Max7219(8,0);//清除缓冲区数据,消除显示误差
}
/***************************************************/
void Display_1(uchar dat)
{
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
}
}
void Display_5(uchar dat)
{
uchar i;
for(i=1;i<9;i++)
{
Max7219_pinCS=0;
Write_Max7219_byte(i);//写入地址,即数码管编号
Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字
//自己做项目写的2*4点阵屏驱动,分享给大家,基于STC15单片机
点阵屏如上图所示
#include "stc15w4k32s4.h"
#define uchar unsigned char
#define uint unsigned int
//定义Max7219端口
sbit Max7219_pinCLK = P1^7;
void Init_MAX7219(void);//初使化函数
void Display_1(uchar dat);//1号屏显示数字
void Display_2(uchar dat);//2号屏显示数字
void Display_3(uchar dat);//3号屏显示数字
void Display_4(uchar dat);//4号屏显示数字
Write_Max7219(0x0b, 0x07); //扫描界限;8个数码管显示
Write_Max7219(0x0c, 0x01); //掉电模式:0,普通模式:1
Write_Max7219(0x0f, 0x00); //显示测试:1;测试结束,正常显示:0
Write_Max7219(1,0);//清除缓冲区数据,消除显示误差
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
uchar code disp1[38][8] ={
{0x00,0x30,0x48,0x48,0x48,0x48,0x48,0x30},//0
{0x00,0x10,0x30,0x10,0x10,0x10,0x10,0x38},//1
{0x00,0x78,0x08,0x08,0x78,0x40,0x40,0x78},//2
//功能:向MAX7219写入数据
//入口参数:address、dat
//出口参数:无
//说明:
void Write_Max7219(uchar address,uchar dat)
{
uchar i;
Max7219_pinCS=0;
for(i=1;i<9;i++)
{
Write_Max7219_byte(address); //写入地址,即数码管编号
for(i=1;i<9;i++)
{
Max7219_pinCS=0;
Write_Max7219_byte(i);//写入地址,即数码管编号
Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字
Write_Max7219_byte(0);
Write_Max7219_byte(0);
{0x00,0x78,0x08,0x08,0x78,0x08,0x08,0x78},//3
{0x00,0x10,0x30,0x50,0x78,0x10,0x10,0x10},//4
{0x00,0x78,0x40,0x40,0x78,0x08,0x08,0x78},//5
{0x00,0x78,0x40,0x40,0x78,0x48,0x48,0x78},//6
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
{
uchar i;
Max7219_pinCS=0;
for(i=8;i>=1;i--)
{
Max7219_pinCLK=0;
Max7219_pinDIN=DATA&0x80;
DATA=DATA<<1;
Max7219_pinCLK=1;
}
}
//-------------------------------------------
sbit Max7219_pinCS = P1^6;
sbit Max7219_pinDIN = P1^5;
void Write_Max7219_byte(uchar DATA); //向MAX7219(U3)写入字节
void Write_Max7219(uchar address,uchar dat); //向MAX7219写入数据
Write_Max7219_byte(dat); //写入数据,即数码管显示数字
}
Max7219_pinCS=1;
}
void Init_MAX7219(void)//初使化7219
{
Write_Max7219(0x09, 0x00); //译码方式:1;BCD码,0;非BCD模式
Write_Max7219(0x0a, 0x0a); //亮度0-f(0-16)
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
}
}
void Display_7(uchar dat)
}
}
void Display_6(uchar dat;i++)
{
Max7219_pinCS=0;
Write_Max7219_byte(i);//写入地址,即数码管编号
Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字
}
}
void Display_3(uchar dat)
{
uchar i;
for(i=1;i<9;i++)
{
Max7219_pinCS=0;
Write_Max7219_byte(i);//写入地址,即数码管编号
Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字
Write_Max7219_byte(0);
Write_Max7219_byte(0);