生产中理解数码航空相机ADS40原理
飞机姿态变化对ADS40数字航摄相机成像的影响

飞机搭 载 A S0数 字航摄 相机 ,飞行高度 20 D4 10m至
2 0 。在进 行广 州 北部 多 山地 区飞行 时 ,空 中风 4 0m 较 大 ,气 流变 化 明显 ,飞机 俯 仰 、倾斜 变化 经常超 标, 成 L 造 0级影像 多处 出现拉伸情 况 ,最后 导致 L 1
. A S 0 数字 航摄 相机 大 比例 尺航 空摄 影 的应用 有 所 3 1飞机姿 态变化 的种 类及 定义 D4 飞机 姿 态变 化主 要 有俯 仰 、倾斜 和航 偏三 种 。 帮助和借 鉴 。
2AS0成像 原理 D4
根据 航空标 准 A IC 7 5的定义 ,俯仰 角 ( ic ) RN 0 p t h
3 飞行姿态 变化对 A S 0成 像 的影 响 D4
由于 A S0采 取 的是 连续推 扫的成 像方式 ,因 范 围 内时 ,通 过座 架修 正 以及 姿态 参数 的纪 录还 可 D4
此飞机的飞行姿态变化将直接影响成像的效果。虽 以把影像 “ 回 ” 但 当瞬 间变化超 标时就 无法修 正, 拉 , 然 A S0配置 的 PV0陀螺稳定平 台具有 自动调 整 从 而造成 L 影像 出现异 常甚至 裂缝 。 D4 A3 1 姿 态 的功 能 ,但 俯仰和 倾斜 的修正都 要求在 ±5 。的 图 2箭头 所指处 即为原始 影像被 拉伸 的情 况 , 范 围内 。在 进行 中小 比例 尺航 空 摄影 时 , 由于 飞行 且该 拉伸直接 导致 其 L 影像 出现 裂缝 ,如 图 3箭头 1
级 影像 出现异常 甚至裂缝 。主要包 括 以下 几种情况 :
( )飞机 瞬 间倾 斜 (o 1 1 r l )姿 态变化超 标 ,造 成 L 影像 出现异 常 。 l
浅谈ADS40影像在VirtuoZo中的定向

ADS40航空数码摄影相机的校准
个工程模型的基线校准 ( 3 图 )转换前后的结果。 系统的光学特性 。从结果可看 出飞行方向一般 比垂 其次需要测量点扩散 函数 (S ) P F ,点扩散函数是 直方 向要好 。
-
,
。
£ 一 …
一
一
图 2 从 ( ,Y )到 ( ,Y ,Z )的转换 x ,z x
片摄影相机和数码摄影相机将会共同应用在航空摄 求 上的前 景乐 观 。
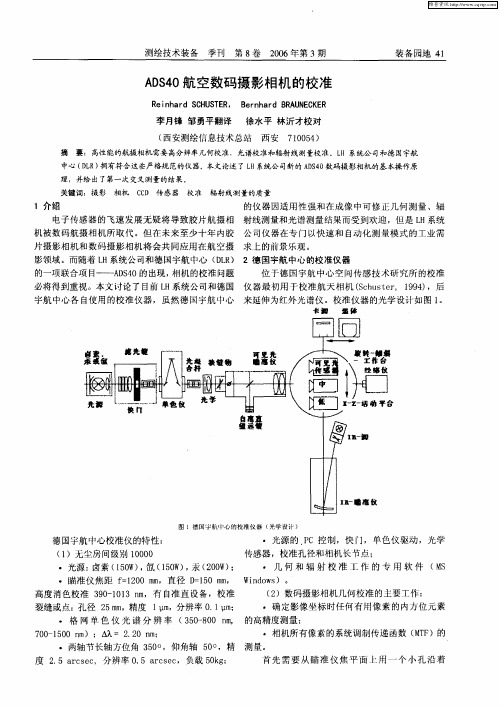
影领域 。而 随着 L H系统 公 司和德 国宇 航 中心 (L ) 2德 国宇 航 中心 的校 准仪 器 D R 的一项 联 合项 目—— A S0的 出现 , 机 的校 准 问题 D4 相 位 于德 国宇 航 中心 空 间传 感 技 术 研 究所 的校 准
・
两轴节长轴方位角 3 0 ,仰角轴 5  ̄ 5 ̄ 0 ,精
度 2 5a c e, 分辨 率 0 5a ce , 负载 5k ; . r sc . r sc 0g
测量。 首 先 需 要 从 瞄 准 仪 焦 平 面 上 用 一 个 小 孔 沿 着
维普资讯
转 换 。空 间 固 定 坐 标 系 (,, ) X Y z 向影 像 坐 标 系 向这两 个 主 要方 向 。通过 这 些测 量 可 以计 算 出沿 线
( , z ) X Y , 转换 时需应用简单的转换公式 ( lo 方 向的任意 点 的 MF O hf h T ,并用 于影像 处理 过程 的输 入 。
高度消色校准 3 0 1 1 m 9 - 03 n ,有 自准直 设备 ,校准 裂缝或点: 孔径 2 l 精度 l m 分辨率 0 1 m 5t, i l n , u . : u
.
格 网 单 色 仪 光 谱 分 辨 率 ( 5— 0 l 的高精度测量 ; 3 08 0 F , m 70 10 m :△ 0— 50 n ) = 22 i; .0 r m ・相 机所 有像 素 的 系统调 制 传递 函数 (T )的 MF
数码航摄像机----传统胶片航摄像机的替代者

数码航摄像机----传统胶片航摄像机的替代者余永胜1 游宁君2(1.武汉勘测院,2.武汉威克胜空间信息技术有限公司,湖北武汉 430070 )Aerail Digital Camera—Replace of Traditional Aerial Film Camera摘要:数码航摄像机是直接获取高精度数字影像的重要手段之一。
本文详细介绍了当前国际数码航摄像机的主流产品及其关键技术,着重分析了三种主流数码航摄像机的成像原理,同时对各类像机的优缺点进行了评估。
关键词:数码航摄像机, 评估一、前言数字影像的获取是全数字摄影测量的第一道工序,数字影像质量的优劣直接影响后续各工序及最后成品。
如何更有效、更经济、更方便且高精度地获取数字影像,是数字摄影测量发展的关键技术之一,为此数码航摄像机应运而生。
传统航摄像机使用胶片作为记录信息的载体,通过对航片进行高精度扫描获取数字影像;数码航摄像机则使用光敏元件作为成像器件,将光学信号转换成数字信息,直接获取数字影像。
随着相关关键技术飞速发展,如今传统航摄像机正面临着大幅面数码航摄像机的巨大挑战。
在伊斯坦布尔刚刚闭幕的第20届国际摄影测量与遥感大会(ISPRS)上,已看不到传统航摄像机的身影,取而代之的是几个国际著名公司展出的数码航摄像机。
数码航摄像机的推出与成功应用,已成为航空摄影测量的又一个里程碑。
普通数码像机进入人们的日常生活已有多年,但数码航摄像机却姗姗来迟,究其原因,技术的复杂程度与极高的精度要求非普通数码像机所能比拟,主要需要解决的几个关键问题是:①数字影像幅面的问题;②输出影像的几何精度问题;③摄影方式是否符合摄影测量原理,是否兼容已被广泛使用的数字摄影测量工作站;④海量数据及时可靠的传输、处理与存储等问题。
时至今日,数码航摄像机技术日臻成熟,并已步入商业化生产阶段,目前已有多台数码航摄像机应用于世界各地。
二、数码航摄像机及发展现状目前,国际上主流的数码航摄像机的生产厂商及其产品主要包括VEXCEL Imaging公司生产的UltraCAM-D大像幅数码航摄像机、Z/I Imaging 公司生产的DMC大像幅数码航摄像机、Leica公司生产的ADS40推扫式数码航摄像机,除此之外,还包括IGI公司生产的DigiCAM 14K小像幅数码航摄像机,以及DiMAC小像幅数码航摄像机等。
ADS40数字航空摄影在义县航测中应用

ADS40数字航空摄影在义县航测中应用摘要:本文通过义县ads40数字航空摄影测量实践,总结出基站架设、控制点布设等经验,以便在今后的工作中进行参考。
关键词:ads40;像元;空三加密;地面gps 基站中图分类号: s771 文献标识码: a 文章编号:0引言ads40(airbornedigitalsensor)数字航摄仪是三线阵推扫成像,能同时提供三个全色与多个光谱波段数字影像,其全色波段的前视、下视和后视影像构成三对立体以供内业观测。
ads40航测仪上集成了gps和惯性测量装置imu,为每条扫描线产生较准确的外方位初值,因而可在少量(或没有)地面控制的情况下完成对地面目标的三维定位,从而大量减少摄影测量外业控制工作量,缩短生产周期,提高作业效率。
ads40三线阵推扫式摄影与框幅式摄影在原理上有很大不同,其生产流程及技术要求也将有所改变,这给航测生产带来许多新问题。
本文着重阐述了ads40应用在义县1:1000航测中的生产应用情况,及达到的精度指标。
1ads40的系统构成、成像原理及其性能(1) 系统构成ads40由传感器头sh40、控制单元cu40、大容量存储系统mm40、操作界面oi40、导航界面pi40、pav30陀螺稳定平台等部件组成。
sh40中集成有高性能镜头系统和惯性测量装置imu,镜头焦平面上安置3条全色波段、3条彩色波段(r、g、b)和近红外波段(nir)的ccd阵列探测器,像元大小为6.5μm,全色波段阵列由2条12000像元ccd阵列构成,其交错半个像元排列以提高地面分辨率,多光谱波段由12000像元构成。
在cu40中集成了gps接收机及applanix公司的pos系统,pos通过对imu数据及gps数据的实时处理,保证了飞机的平稳飞行,并为后来影像的外部定向提供了高精度的初始值。
mms40由6个高速scsi磁盘构成,能记录4h的航摄数据,传输率高达40~50mb/s。
oi40 和pi40 界面采用图形化、触摸式、高分辨的显示屏,更易于操作。
飞机姿态变化对ADS40数字航摄相机成像的影响

飞机姿态变化对ADS40数字航摄相机成像的影响吴俊;罗军凯;李潭欣【摘要】主要讨论飞机瞬间俯仰和倾斜方向姿态变化对ADS40数字航摄相机成像的影响,并以广州项目中出现的情况为例,重点分析了不同的姿态变化造成影像拉伸的原因,以求在实际飞行中尽量避免该问题的发生.【期刊名称】《测绘技术装备》【年(卷),期】2010(012)001【总页数】3页(P46-48)【关键词】ADS40;俯仰;倾斜;影像拉伸【作者】吴俊;罗军凯;李潭欣【作者单位】西安测绘信息技术总站,陕西西安,710054;西安测绘信息技术总站,陕西西安,710054;西安测绘信息技术总站,陕西西安,710054【正文语种】中文ADS40是由瑞士Leica公司于2000年推出的三线阵推扫式数字航空摄影相机。
该相机采用了CCD成像、GPS/IMU辅助等新技术,大幅度提高了航空摄影效率,切实缩短航摄作业周期。
但是,由于ADS40独特的线阵推扫成像方式与传统的框幅式相机成像完全不同,因此在使用过程中也出现了许多新的情况和问题。
本文就是基于该相机在广州航空摄影项目实施过程中出现的飞机姿态变化对影像造成的拉伸问题的总结,希望对以后ADS40数字航摄相机大比例尺航空摄影的应用有所帮助和借鉴。
ADS40数字航摄相机采用线阵列推扫式成像的原理,如图1所示,其成像部分由前视、下视、后视三组CCD线阵组成,完成对同一地面区域三幅影像的立体覆盖。
其中,全色成像部分由前、后视全色CCD线阵组成,彩色和彩红外成像部分由红、绿、蓝和近红外CCD线阵组成,经融合处理合成真彩色或彩红外影像。
由于ADS40采取的是连续推扫的成像方式,因此飞机的飞行姿态变化将直接影响成像的效果。
虽然ADS40配置的PAV30陀螺稳定平台具有自动调整姿态的功能,但俯仰和倾斜的修正都要求在±5°的范围内。
在进行中小比例尺航空摄影时,由于飞行高度相对较高,气流比较平稳,而且使用的运8、安30等较大型航测飞机受气流影响也相对较小,俯仰和倾斜变化通常不超过5°。
ADS40

ADS40的成像方式
飞行轨道 推扫成像 飞行轨道 推扫成像
地球
地球
a
b
图 (a)异轨立体成像方式,b)同轨立体成像方式
图 ADS40三个全色波段的成像示意图
在飞行过程中,三个全色波段的CCD平行的排列在同一个 焦平面上(所有CCD的焦距相同,且相对位置固定)。相对 于框幅式相机,在飞行过程中,全色的下视CCD实际上相当 于记录下每一成像时刻等效的框幅相机正中心一列的信息, 前视影像的CCD每一列记录下等效框幅式相机飞行方向上一 f * tg (28.4 o ) 处影像的信息,后视CCD记录等效框幅 列位于 式相机 f * tg (14.2 o ) 处一列影像的信息(假定f是相机的焦 距)。全色波段的影像通过CCD直接感应光线信息得到,而多 光谱(红、绿、蓝和近红外)的CCD则记录分光镜分光之后 的光谱信息。在成像过程中,GPS以2Hz的频率进行采样, IMU以200Hz的频率采集相对的直线位置和角元素;利用 IMU的相对位置对GPS的绝对位置进行校正之后得到最后的 外方位元素的直线元素,最终的外方位元素是以800Hz的频 率内插得到的。
图 ADS40的系统组成
图 ADS40各个波段示意图(Peter Fricker,et al,2001)
ADS40传感器的主要技术参数有: (1)3个全色波段的CCD阵列(每个CCD有2×12000个像素,也就是两个12000个 像素的CCD并排放置,且两个CCD之间存在半个像素,约3.25um的错位,这种设计 可以提高几何分辨率,原理可参考文献R. Reulke, et al 2004); (2)4种多光谱CCD(红、绿、蓝和近红外),每个都是12000个像素,并且同一种 光谱的CCD还可以有多个投影方向。七种CCD(全色的前视、下视和后视,红、绿、 蓝、红外)排列在一个相片平面上(对应着同样的焦距),图所显示的是七个CCD的 一种排列情况。实际上单色波段的三个CCD不一定排列成相同的投影方向,其他 的投影方向上也可以设置单色波段的CCD,CCD上每个像素大小是6.5×6.5um2; (3)ADS40的焦距标定为62.5mm,实际的检校结果会稍微有一点不同; (4)一个CCD在旁向方向上的视场角为64度,实际上由焦距和CCD的长度可以计 −6 −3 o 算出视场角的大小: 2 * arg tan(6.5 * 10 * 6000 /(62.5 * 10 )) ≈ 64 (5)各个CCD的感光范围分别是:全色波段是465 nm -680 nm,单色光谱中蓝 色波段是430 nm -490 nm,绿色波段是535 nm -585 nm,红色波段是610 nm -660 nm,红外波段是835 nm -885 nm。
全数字航测相机ADS40及其应用初探

全数字航测相机ADS40及其应用初探缪剑;杨天克;徐水平;李星全【摘要】本文简单介绍了目前国际上比较流行的线阵航空数字传感器ADS40的一些基本情况,分析了该传感器的技术优势与应用意义,并对配套应用技术的开发问题进行了初步的讨论.【期刊名称】《测绘技术装备》【年(卷),期】2007(009)001【总页数】3页(P44-45,12)【关键词】航空数字传感器;ADS40;三线阵;数字影像;POS【作者】缪剑;杨天克;徐水平;李星全【作者单位】西安测绘信息技术总站,西安,710054;西安测绘信息技术总站,西安,710054;西安测绘信息技术总站,西安,710054;西安测绘信息技术总站,西安,710054【正文语种】中文【中图分类】P22000年以来,在国际上陆续出现并不同程度投入使用的数字航测相机大体上分为两类,一类是成像器件以面阵CCD为主要特征,另一类则以线阵CCD为主要特征。
两类相机各有其独特优势,也都存在一些使用上的限制。
面阵CCD航测相机的代表性产品分别有DMC(美国/德国 ZI)和UCD(奥地利Vexcel),线阵CCD航测相机的代表性产品有ADS40(瑞士Leica)和早期的HRSC(德国DLR)。
全数字航测相机系统ADS40是一种能够同时获得立体影像和彩色多光谱影像的多功能、数字化的航空遥感传感器。
其立体成像部分由全色波段的前视、后视和R、G、B任一波段的下视三组CCD线阵组成,全色波段每组CCD线阵均由两条线阵按照交叉像元的方式构成超分辨率模式,完成对同一地面区域三幅影像的立体覆盖[1]。
彩色成像部分由红、绿、蓝、近红外四条CCD线阵组成,可分别成像,经融合处理合成真彩色影像和彩红外多光谱影像。
ADS40系统全球已有近50套,分别在美国、日本、德国、澳大利亚等国家投入使用,广泛应用于工业、农业、国防、交通、能源、通信、城市规划等各行各业的基础建设项目,综合应用效益显著。
我国引进了ADS40,目前处在试验应用阶段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
从 摄 影 测 量 作 业 流 程 上 看 .利 用 AD 4 S 0相 机
合成真彩色影像 、红外影像用于遥感资源分类 。定
向精度 可 以满 足 12 0 至 1 0 :0 0甚 : 0大 比例 尺测 图的 5
数码相机投人使用 ,替代原来 的胶片相机 ,已 成 为 摄影 测 量发 展 的趋 势 。抛 开 摄影 感 光材 料 颗粒 的约束 ,数码影 像成本大幅降低 ,质量普遍提高 。 另外 ,数码相机 辐射分辨 率更高 ,对 细节更加 敏 感 .提高了阴影下的地物识别成功率。对 A S0相 D4 机而言 ,共配有 7 C D列 ,其 中前后视影像用于 组 C
应 用 技
每条扫描线对应一个投影 中心 ,因此整张影像不存
在严 格 的核线 关 系 。核 面 与推 扫 的 C D线 阵相 交 在 C
0 级影像 上是一条 曲线 ,由于航 空相 机稳定 性差 , 因此采用类似于卫星影像通过拟和得到的近似核线 用于测图 , 对精度影响较大。对于 A S0 D 4 影像 的像
系下坐标 ,需 要转 化 为局部 坐 标 ,另外 ,考虑 到精 度 检查 和质量 控制 ,仍 需要 地 面控制 。
5 使 用 AD 4 S 0影像 测 图
【 王永平, 1 】 李英成, 薛艳 丽, A 4 等.DS 0推扫式数字航摄 仪试验
研 究 U. 科 学 , 0 () 1— 2 . 1 测绘 2 71: 9 1 1 0 1 ( 习编辑 实 高 腾)
对 于 A S0的推 扫式成像 得到 的立体 相对 , D4
The r fAe i l g t lCa e aADS 0 o y o ra Di ia m r 4
Ga Yi i o -m பைடு நூலகம்
( a3 a oeh i la d S r e ntue ay a 3 0 2 hn ) T i n Getc nc n u v y Istt,T iu n 0 00 ,C ia u a i
Ab t a t Ae i l d gt l c m e a sr c : ra i i a r s ADS 0 o r e l e a r y s n s o e eo me t d r ci n o e a ra i i l c me a . a 4 f t e i ra t d fr a d v lp n i t f n w e i l d gt a r s h n a e o a T e n w e il d g tl c e a r d p e m a i g mo e o u h b o m,wh c r q i p d wi OS s se t e t h e a r ii a r s we e a o td i g n d f p s - r o a a m ih we e e u p e t P y tm o g t a— h t u e o a r .I h s p p r h u h r i t d c d i gn rn i l s f sn o f t e i e ar y n i u s d o e a in i d f c me a n t i a e ,t e a t o n r u e ma i g p i cp e o e s r o h e l ra ,a d d s se p r t t o r n c o p o e u e o h tg a r c d r f p o o rmme r f ADS 0 c me a . ty o 4 a rs
6 新型 数码 航 空相机 与摄 影测 量生产
S 5 ,S 5 两种传感器镜头系统 ,能提高产 品性 H 1 H2
价比。
4 A S 0相机摄 影 测量作 业流 程 D 4
A S0相 机装 配 了 A pai公 司的 P S系统 , D4 p lnx O 由于航 空 飞行 中 P S本 身 的误 差 及 其 他 测 量误 差 O
方 驱 动模 式测 图而 言 ,如何 简 化二 维 的驱动 量 需要 进一 步研 究 。
物方驱动则是从地面坐标反算 回影像 ,调整地 面点高程值 ,相对的视差即可消除。而 A S0 D 4 使用 是原始影像 物方驱动测 图 ,当地面点反算 到影像
图 2 飞行 得 到 的 AD 4 S 0 0级 影 像 局 部
进 行处 理 ,P S系统 得 到 的 G S MU数 据平 差后 O P ,I
要求 ,影像 的获取也十分迅速 。这种高精度 、多光 谱航空平台相机的出现 ,为摄影测量带来 了极大的
活力 。
参考文献 :
可 以获得较高精度 ,不需要地面控制。但是实际生 产 中 , A S 0配备 P S系统 得 到的是 WG 8 D4 O S 4坐标
・
时 。利用共线方程 只能反算 回有外方位元素的 0 级
影 像 , 由于 0级影 像 不利 于人工 观 测 ,测 图过 程 还
3 )作 业 条 件 局 限性 小 。提 高 设 备 的 机 动 性 ,
并适 应不 同种 类 的惯性 导航 测量 装置 。
需要 0级影像 到 1 级影像 的计算 。A S0装载 的 D4
立 体测 图 ,下 视影像 用 于 正射影 像 生成 、R B影像 G
的存在 ,直接利用 P S数据作为多片前方交会精 O 度较差 , 推荐做 区域 网平差处理。外方位元素处理 的基本 流程 如下 :G SI P/ MU数 据处 理 ;建 立地 面 控 制支持的地理参考基准 :0级影像纠正到某一高程
P S系 统 采 用 WG 8 O S4坐标 系 ,不 考 虑 转 换 到 局 部
4 )线阵推扫方式提 高了彩色和近红外 以及全
色 正 射 影 像 和 真 正 射 影 像 产 品 的 生 产 效 率 。选 择
坐标系 。其 中,地面点到 0级影像本质是搜索 0 级 影像上哪条扫描线观测到该地面点的过程 ,O 级影 像到 1 级影像是纠正生成 1 级影像的反算f l 1 。