复杂机电系统动力学相似分析的键合图法
机械检索题
每位同学从以下题目(或自拟检索题目)完成对以下数据库或电子图书的检索练习:中国知网、维普、万方、EBSCO、SPRINGER Link。
检索报告请于11.30号之前发到我的邮箱263392783@。
具体格式要求详见综合实习报告。
1. 微梁力学性能尺寸效应的研究2. 环境振动驱动微型压电发电装置的关键技术研究3. 激光光热驱动技术与微型光热驱动机构研究4. 纳米级步进压电微动台结构设计与性能分析研究5. 微尺度形貌修饰硅表面的摩擦特性研究6. 超精密气浮定位工作台的动力学研究7.压电陶瓷驱动的微位移工作台建模与控制技术研究8.基于MEMS技术的胰岛素集成系统的研究9.数字化无阀微泵的设计、制作及应用实验研究10.多学科设计优化及在MEMS设计中应用的研究11.微尺度器件及旋转干气密封微间隙内流体流动问题的研究12. 径向与复合微动的运行和损伤机理研究13. 压电双晶片型二自由度惯性冲击式精密驱动器理论与实验研究14. 基于MEMS工艺的轴向磁化永磁微电机结构优化及性能分析15. 基于MEMS技术的自吸微泵的研制16. 提高硅微陀螺仪性能若干关键技术研究17. 微结构的静电驱动特性研究18. 微细管道内表面检测及三维重建关键技术研究19. 电热驱动微夹钳的拓扑设计及相关问题研究20. 基于显微干涉术的微机电系统动态测试方法与系统的研究21. 硅微机械扭转镜光致动器及其动态测试技术的研究22. 压电步进二维精密驱动器理论及实验研究23. 柔性机构拓扑优化方法及其在微机电系统中的应用24. 高信噪比电容式微机械陀螺的研究25. MEMS-DMs理论设计及工艺研究26. 基于MEMS的无阀泵数值仿真与实验研究27. 虚拟仪器系统的误差分析方法的研究28. 微制造平台振动主动控制研究29. 点式压电智能结构振动控制方法改进的研究30. 微操作系统中定位控制、人机交互和微量注射问题研究31. 微光机电器件及其关键技术研究32. SiC光学材料超精密研抛关键技术研究33. 精密机械仿生热稳定构件研究34. 基于变比模型的压电驱动微位移工作台控制方法研究35. 动态测量误差修正灰色建模理论与应用技术研究36. 反应烧结碳化硅质反射镜制备技术的研究37. 多频调制的相位法激光测距中若干关键技术研究38. 焦耳天平(量子质量基准)的磁场系统研究39. CPT原子钟、星载钟及时频测控领域的新技术研究40. 低速风洞应变天平校准系统总体方案及关键部件设计与分析41. 光纤光栅在车辆动态称重系统中的应用研究42. 车辆动态称重技术研究43. 应变式汽车轴重动态测量系统性能增长研究44. 中国古代度量衡制度研究45. 制造系统中带送物料流的动态计量技术和系统研究46. 关节式坐标测量机标定技术研究47. 纳米三坐标测量机测控系统关键技术研究48. 超站仪检定技术研究49. 纳米三坐标测量机机械结构及接触式测头技术研究50. 坐标测量机误差建模与修正技术研究51. 大尺寸空间坐标测量系统精度理论若干问题的研究52. 非正交系非接触坐标测量机关键技术研究53. 通用数字化高精度非球面干涉检测技术与系统研究54. 稳健回归技术及其在光谱分析中的应用55. 同步移相干涉共焦显微成像技术研究56. 咔唑衍生物类双光子荧光探针在生物成像中的应用57. 光谱发射率在线测量技术研究58. 原子力显微镜针尖-表面相互作用分子动力学仿真研究59. 用于绝对距离测量的He-Ne激光多波长干涉仪的研究60. 多光谱、超光谱成像探测关键技术研究61. 可见—近红外微型空间调制光谱仪关键技术研究62. 基于MEMS的全固态双增益阿达玛光谱仪关键技术研究63. Wolter-I型反射镜的加工及表面粗糙度检测64. 非球面液滴微透镜及其阵列的制作和应用研究65. 分时激光干涉测速技术66. AFM恒力模式下倾角和摩擦力对测量结果影响的研究67. 时间反转镜被动定位技术研究68. 基于激光干涉原理的海洋灾害预警关键技术研究69. 大射电望远镜指向误差建模分析与设计研究70. 信号小波理论与一体化小波分析仪的研究71. 快速全光谱反射差分光谱仪的研究72. 基于傅立叶红外光谱仪的材料光谱发射率测量技术的研究73. LAMOST二维数据处理方法研究74. SSS选星算法研究及小系统软件设计与实现75. 大尺度范围内视觉测量技术研究76. LAMOST光纤位置检测与观测规划中相关问题的研究77. 日像仪天线阵系统设计研究78. 空间太阳望远镜高速数据传输系统79. 利用动态靶标装置的光电经纬仪跟踪性能评价研究80. 星载雷达高度计误差分析和定标技术研究81. 核磁共振多匝线圈找水技术研究82. 干涉法大气风场探测技术研究83. 陀螺经纬仪数字化及自动化关键技术的研究84. 深海热液保压采样器的关键技术研究85. 不接触电极探测方法及仪器研究86. 车载平台变形测量技术的研究87. 双锥腔互补偿型绝对辐射计(DCICAR)88. 大量程光纤绝对测距仪研究89. 多传感器光测系统数据融合技术的应用研究90. 车载平台变形测量和误差校正技术的研究91. 基于底层开发技术实现经纬仪测控系统实时通讯技术的研究92. 宽量程涡街流量计信号处理方法及其实现技术的研究93. 基于单位元的大口径电磁流量计干校准方法研究94. 液体微小流量的非定常流测量原理与方法的研究95. 涡街流量计工况条件适应性研究96. 多声道超声波气体流量测量关键技术研究97. 射流流量计关键技术研究98. 涡街信号数字处理技术研究99. 多光谱辐射测温技术研究100. 科氏质量流量计理论与应用研究101. 分布式光纤温度测量及数据处理技术研究102. 流量传感器信号建模、信号处理及系统研究103. 微量热计的研制及微纳米薄膜比热测试与分析104. 化爆材料动态切削温度的薄膜热电偶测量原理及传感器研制105. 基于超声多普勒方法的管道流量测量研究106. 影响气体超声波流量计计量精度的主要因素研究107. 电站锅炉煤粉火焰安全监测及燃烧诊断方法研究108. 无陀螺捷联惯导系统若干关键技术研究109. 基于SOI的电容式微加速度计器件物理模型与实验研究110. 纳米压痕/划痕测试装置的设计与试验研究111. 压电陶瓷微定位系统的逻辑规则控制研究112. 声相关测速技术研究113. 新型时栅位移传感器研究114. 动态压力测量系统非线性模型辨识115. 高量程MEMS加速度计封装研究116. 离散频谱校正理论的抗噪性能研究及其在工程中的应用117. 基于印刷线路板(PCB)的矩形离子阱及阵列离子阱质谱仪的研发118. 荧光共轭聚合物传感器与便携式玉米成分快速分析仪研究119. 快速检测牛奶成分的近红外光谱测量方法及系统研究120. 交叉导流式微型混沌混合器的研究121. 矩形离子阱质谱仪和离子淌度谱仪的研制122. 分析仪器数据格式及质谱检索系统的研究与应用123. 基于CC的工业数据采集系统开发方法研究124. 动平衡测量的若干关键技术问题研究125. 用于铝板检测的电磁超声导波换能器优化设计技术研究126. 透射时差法超声无损检测技术研究与系统实现127. 红外辐射成像无损检测关键技术研究128. 飞行器动平衡测试技术的实验研究129. 基于反馈控制与统计分析的结构损伤识别技术研究130. 基于数学形态学的射线检测数字图像处理技术131. 分布式光纤管道安全检测技术研究132. 不平衡量信号的精密谱分析及其在砂轮动平衡测控仪中的应用133. 多工位全自动动平衡机设计方法及关键技术研究134. 数字化谱仪软件系统的研制和应用135. 基于时—频分析的虚拟式旋转机械特征分析仪系统的研究136. 气动板形仪测控系统实验研究及板形理论建模仿真137. 机电产品行为特性及可持续概念设计方法研究138. 基于结构移植的零件变异设计若干关键技术研究及应用139. 机械对称的概念、作用及其应用知识获取的研究140. 复杂产品可拆卸性分析与低碳结构进化设计技术研究141. 语音情感特征提取与识别方法研究142. 现代机械产品设计规划及可视优化设计方法研究143. 基于FPBS的机械系统模块化设计方法与应用研究144. 不确定性连续体结构的拓扑优化设计研究145. 磁力机械多场耦合及多学科优化设计146. 基于语义网技术的机械设计方法和技术研究147. 机械系统虚拟样机平台建模技术与动力学求解研究148. 功能特征驱动的机械产品概念设计研究149. 含约束复杂机械系统空间布局及工业美学研究150. 差速双螺杆捏合机型线设计理论及螺旋面高效高精度加工研究151. 机械产品概念设计过程建模与方案求解问题研究152. 基于CFD方法的叶轮机械优化设计理论及实例153. 机械产品快速设计与制造系统研究154. 基于仿真分析的复杂机械产品多学科设计优化方法研究155. 可调双输出函数发生机构及其自调结构设计研究156. 行星分度凸轮机构的创新设计与研究157. 运动链的环路理论与同构判别及图谱库的建立158. 面向对象的多领域复杂机电系统键合图建模和仿真的研究159. 增压器叶轮逆向工程中的关键技术研究160. 产品满意度理论及在机电产品创新设计中的应用161. 机械产品快速创新设计及其关键技术的研究162. 面向机构构型设计的进化设计原理和方法的研究163. 结构修改重分析的Epsilon算法164. 叶轮机械中若干非定常流动特征的初步研究165. 面向机构构型设计的进化设计原理和方法的研究166. 机械产品概念设计的若干方法研究167. 结构定性建模理论及其在机械产品类比设计中的应用研究168. 基于PDM的参数化变型设计系统的研究169. 六自由度运动模拟器结构参数分析设计170. 一次性机械的设计方法的研究171. 反求工程中点云三角化算法的研究及其实现172. 符合ISO13584标准的零件库研究及开发173. 连续体拓扑优化设计174. 基于SIMULINK的倒立摆系统拟人智能控制的研究及实时控制的实现175. 自由曲线曲面重构系统关键技术的研究176. 遗传算法与梁结构拓扑优化设计研究177. 基于网络和虚拟现实的画法几何模型库教学系统的研究与实现178. 机械工程图图形检索技术研究179. 基于投影、法矢和主曲率的自由曲面造型180. 机械三维模型的实时交互式显示181. 由散乱数据点重建三维实体模型的研究182. 双语教学语言规律与机械学科专业良性互动机电液集成共性技术中机液综合控制研究与应用出师表两汉:诸葛亮先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
复杂机电系统及仿真研究
复杂机电系统及仿真研究摘要:建立一个典型复杂机电系统,将键合图与模块理论相结合,建立一个开放性的机动系统模块库。
所建立的模型仿真与实测数据一致。
关键词:机电系统仿真abstract: this thesis has established an open electro mechanical system module library by uniting the theories of bond graph and modularization. and based on it a typical complex electromechanical system .simulation results of the global mathematical model closely verge on experimental result.key words: electromechanical system simulation中图分类号:tu85文献标识码: a 文章编号:在复杂机电一体化系统开发中,跨学科的系统建模方法、多领域模型的协同仿真和多学科协同开发的过程管理技术是目前亟待解决的关键技术,可以对机电一体化系统的设计和开发提供强有力的支持,目前已经成为该领域的研究重点。
近年来,复杂产品虚拟样机技术随着计算机技术的发展而迅速发展,以计算机虚拟模型仿真代替传统的实物样机实验,使得由机、电、液等多领域部分集成的复杂机电产品设计开发过程大为简化,缩短了产品开发周期,减少了产品开发费用和成本,也优化了产品品质。
复杂机电系统是一种“复合化系统”,由多学科(机械、电子、液压等)技术相渗透、融合而成。
由于标准化、模块化在机械、电子等领域的应用,因此机电系统具有3个重要的性质,即系统、模块、接闻。
将这3个性质运用于系统建模,即为模块化建模的基本思路:将系统按照一定规则划分为通用性较强的模块,并建立开放式的模块库;各模块单独建立各自的数学模型,与其物理模型一起存入模块库中以备调用;通过接口确立各模块交界而的参数使系统整体的数字求解及仿真得以实现。
键图建模与仿真
键图建模与仿真基于Web的键合图法MEMS系统级多能量域仿真平台姓名董正荣学号2016412059专业机械设计及理论学院机械科学与工程学院教师陈延礼基于Web的键合图法MEMS系统级多能量域仿真平台1引言键合图法是一种基于功率流图形化表达的系统动力学仿真方法,它提供了一种统一处理多种能量范畴工程动特性问题的途径。
在MEMS动态系统仿真中,普遍存在大量的多种能量域相互作用以及模型非线性问题,这一直是困扰设计人员的一大难题。
目前,进行MEMS系统级仿真的主要方法有等效电路法、混合信号硬件描述语言法(VHDL-ASM)等。
等效电路法将系统中元件的各种动态参数与电路中的电流、电压等信号相对应。
采用这种方法易于分析系统的动力学特性,但所得到的分析模型完全不能反映MEMS系统的结构特征,且整个建模过程不直观,此外,对于复杂的MEMS 系统很难建立其等效电路。
混合硬件描述语言法(VHDL-ASM)由硬件描述语言(VHDL)发展而来。
优点在于其模型可复用技术使得HDL库可以在建模与仿真过程中直接调用,同时VHDL的广泛使用也使得这一方法成为当前MEMS 系统级仿真中常用的一种方法。
键合图法则基于能量变量统一表达的思想,并借助能量守恒原理统一描述各种能量域中的能量变量之间的关系。
与其它方法相比,键合图法更适合用于建立MEMS多能量域动态系统仿真模型。
2仿真平台的框架及实现键合图系统动特性仿真方法键合图采用四种物理量,即势(e)、流(f)、动量(p)、变位(q)来统一表达工程问题中各种能量域的动态变量。
这四种动态变量高度概括了各种能量域内普遍存在的物理量,在具体的能量域内(如:机械能、电能、热能、光能等)必然存在相应的物理量与这四种动态变量相对应。
键合图模型由功率键、激活键和基本元件集{0-节点、1-节点、转换器TF、换能器GY、源元件(Se、Sf)、阻性元件R、容性元件C、感性元件I、受控元件(MTF、MGY、KSe、KSf)、非线性元件(NR、NC、NI)等}组成。
复杂反应机理的近似方法
复杂反应机理的近似方法对于复杂的连续反应,要从数学上严格要求许多联立微分方程,从而求出反应过程中出现的各物质浓度与实践t的关系十分困难。
所以在动力学中也长采用一些近似方法,常用的方法有速率控制步骤法(速控步近似法),平衡态近似法和稳态近似法。
平衡态近似法可以认为是速控步近似法的特殊情况,对于它们二者,我们在这里分开论述。
1.速率控制步骤速率控制步骤,又称为限速步骤,简称速控步,由于连续反应的数学处理比较复杂,一般作近似处理。
当其中某一步反应的速率很慢,就将它的速率近似作为整个反应的速率,这个慢步骤称为连续反应的速率控制步骤。
就如同木桶效应,反应的总速率由这个最慢的速率控制。
例如:+ → + 这个化学反应可以细分为两个步骤:1+ → + (较慢)2+ → + (较快)反应第二部分需用到反应速率较慢的第一部分所生成的,因此整个化学反应的速率均被第一部分所限制,我们就知道第一部分就是整个反应的速率控制步骤。
另一个常见例子是在有机化学的亲核取代反应中,以S N1反应中生成碳正离子这中间体的步骤中,离去基团离开碳键的过程,就是速率控制步骤。
当一个化学反应的速率控制步骤被确认后,就可以有效率地加入相应的催化剂,以改善整个反应速率。
2.平衡态近似法平衡态近似法与速控步相似,是速控步近似法的特殊应用。
其主要应用于含对峙反应的连续反应,如果在对峙反应后存在速控步,则总反应速率及表观速率常数仅取决于速控步及它以前的平衡过程,与速控步以后的各快反应无关。
由于速控步反应很慢,可以假定快速平衡不受其影响,对峙反应的平衡关系仍然存在,从而利用平衡常数K 及反应物浓度来求出中间产物的浓度,这种处理方法称为平衡态近似。
例: -+⇔11A B C k k →2C D k 若最后一步为慢步骤,那么快速平衡时正逆向反应速率应近似视为相等:1A B 1C k c c k c -= C C A Bc K c c = D 2Cd d c k c t = D 12C 2A B A B 1d d c k k K k c c c c t k -== 令 121/k k k k -= 所以 D A B d d c kc c t= 平衡态近似法的应用要注意反应中要存在一个快速平衡的对峙反应,并且在这个快速平衡的对峙反应之后有一个速率控制步骤,即决速步。
正弦机构键合图建模及仿真的分析研究

现变系数、非光滑、多非线性组合的高维微分方程形式。
这给系统建模的准确建立及状态变量的求解都带来很大的困难。
由于这种非线性系统的动力学分析过程复杂,用手IN写其动力学数学模型就更加困难了。
所以采用面向计算机的自动建模方法能显著提高机构动力学分析计算的效率及可靠性。
1.2.2.2正弦机构动力学建模与仿真如1.2.1所述,关于正弦机构动力学建模与仿真的研究颇为少见。
所见文献中,文献"41用二状态模型建模分析方法对正弦机构的间隙碰撞进行了建模,求得了曲柄圆柱销与往复移动的运动杆件之间的间隙碰撞过程的运动微分方程,并采用小时间步长试探法分析了从自由状态到接触状态的转化过程。
此种算法简单,但精度不高。
值得指出的是,正弦机构运动杆件“换向冲击"带来的振动问题早已引起重视,文献“¨就换向冲击力对磨齿机振动的影响做了分析,提出了减小换向冲击的办法。
文献H51对结晶器的正弦振动装置进行了实时测试,测试结果显示正弦机构在换向时不光滑和连续,并且机构运动时会有一些冲击。
文献u盯对扬矿系统的仿真分析中显示,泵的横向位移曲线在速度零点位置产生明显突变和震荡,也表明了正弦机构在换向时不光滑和连续。
以上文献都给出了分析数据,没有找出产生非纯正弦曲线的一些缺陷原因和影响程度。
对系统建立准确的动力学模型并非要面面俱到的考虑所有影响的因素,根据实际需要做合理假设和一定的取舍,是非常必要的。
本文在考虑正弦机构弹性变形及滑块摩擦的条件下对正弦机构进行了动力学的建模与仿真,意在寻找其“换向冲击”的原因,以及弹性变形和滑块摩擦对机构动态特性的影响程度。
1.3键合图建模的研究现状1.3.1键合图建模的研究现状键合图理论是60年代初美国的H.M.Paynter教授所提出的,其研究的主要目的是建立面向计算机的自动建模与仿真的理论方法‘7¨。
键合图早期被应用于机械系统领域,现已广泛用于多能域耦合系统的建模、分析、仿真和设计,所以它的应用已经扩展到农业、车辆、热力学、生物及化学,流体工程等多种领域。
动力学的图象问题和连接体问题课件

动力学的图象问题 1.常见的图象形式 在动力学与运动学问题中,常见、常用的图象是位移图象(x -t 图象)、速 度图象(v-t 图象)和力的图象(F-t 图象)等,这些图象反映的是物体的运动规律、 受力规律,而绝非代表物体的运动轨迹. 2.图象问题的分析方法 遇到带有物理图象的问题时,要认真分析图象,先从它的物理意义、点、 线段、斜率、截距、交点、拐点、面积等方面了解图象给出的信息,再利用 共点力平衡、牛顿运动定律及运动学公式解题.
一弹簧一端固定在倾角为 37°的光滑斜面的底端,另一端拴住质 量为 m1=4 kg 的物块 P,Q 为一重物,已知 Q 的质量为 m2=8 kg,弹簧的质 量不计,劲度系数 k=600 N/m,系统处于静止,如图 3 所示,现给 Q 施加一 个方向沿斜面向上的力 F,使它从静止开始沿斜面向上做匀加速运动,已知 在前 0.2 s 时间内,F 为变力,0.2 s 以后,F 为恒力,求:力 F 的最大值与最 小值.(sin 37°=0.6,g 取 10 m/s2)
图3
思路点拨:①0.2 s 时 P、Q 两物块恰好分离.②两物块分离瞬间加速度 仍相同,而相互作用力恰好为零.
【解析】 从受力角度看,两物体分离的条件是两物体间的正压力恰好
为 0,从运动学角度看,一起运动的两物体恰好分离时,两物体在沿斜面方 向上的加速度和速度仍相等.
设刚开始时弹簧压缩量为 x0.
思路点拨:①恒力 F 的方向不变,而摩擦力的方向随速度方向的改变而 改变.②v-t 图象的斜率表示物体的加速度.③v-t 图象与 t 轴所围面积表示物 体的位移.
【解析】 (1)设物体向右做匀减速直线运动的加速度大小为 a1,则由 v-t 图象得 a1=2 m/s2
基于键合图的多能域耦合系统自动化建模与仿真
基于键合图的多能域耦合系统自动化建模与仿真*王中双刘德刚(齐齐哈尔大学机械工程学院,齐齐哈尔161006)The automatic modelling and simulation for the systems with the coupling of multi-energydomains based on bond graphWANG Zhong-shuang ,LIU De-gang(School of Mechanical Engineering ,Qiqihar University ,Qiqihar 161006,China )文章编号:1001-3997(2010)08-0085-03【摘要】为提高多能域并存线性系统动力学建模与分析的效率及可靠性,提出了键合图法。
在考虑到独立储能场、非独立储能场能量变量和共能量变量间存在耦合关系的情况下,推导出了便于计算机自动生成的线性系统状态方程的统一公式,基于MATLAB 实现了该类问题的计算机自动建模与仿真。
通过对连续墙抓斗Y 方向纠偏系统的动态分析,说明了所述方法的有效性。
关键词:键合图;因果关系;多能域耦合;建模与仿真【Abstract 】In order to increase the efficiency and reliability of modelling and simulation for the lin -ear systems with the coupling of multi-energy domains ,a method based on bond graph is introduced.In consideration of the coupling of energy variables and coenergy variables in independent energy storage field and dependent energy storage field ,The unified formulae of system state space equations which are easily generated on a computer is derived.As a result ,the automatic modeling and simulation on a comput -er are realized Based on MATLAB .By the dynamic analysis for diaphragm wall grab y axis direction con -trol system ,the validity of the procedure is illustrated.Key words :Bond graph ;Causality ;Coupling of multi-energy domains ;Modelling and simulation中图分类号:TH16文献标识码:A*来稿日期:2009-10-22*基金项目:黑龙江省自然科学基金资助项目(E200523),黑龙江省教育厅海外学人基金项目(1151hz020),齐齐哈尔大学研究生创新科研项目(YJSCX-06X )1引言科学技术和工业生产的飞速发展,使得工程系统的功能不断强化和完善,传统离散式设计方式的局限性日益凸显。
键合图理论及其应用

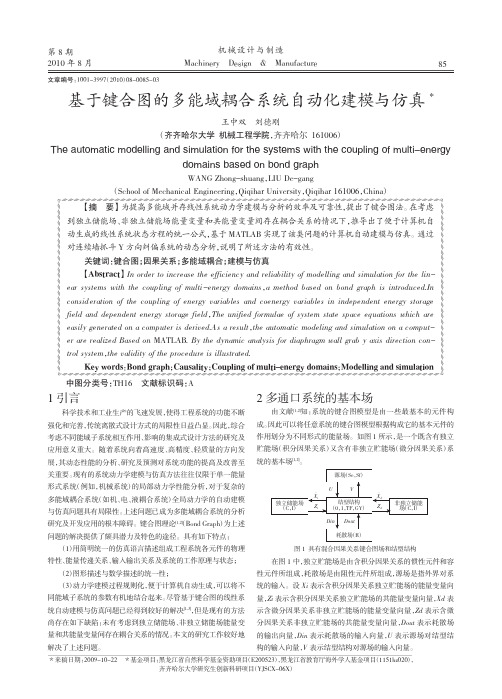
(2)回转器GY(MGY)
回转器用来描述能量 传递过程中势变量与流变
e1
m e2 ..
量的变换关系。
f1
GY f2
回转器的特性方程为:
e2 rf1 rf2 e1
激磁恒定的直流电机可用回转器表示,具有可变激磁电流 的电机可用可调回转器表示。
2.2.3多通口元件
(1)共势结(0-结)
共势结用来连接联系系统有关物 理效用中能来量形式相通、树值相等 的势变量。
2.3 键合图的增广 (1)容性元件的因果关系
容性元件的因果关系有两种。
对于第一种因果关系,其静态关系在非线性情况下可以 写成:
ec(q)c(f(t)d)t
在线性情况下为: e 1 q 1 fdt
C0
C0
其中 C 0 为线性容度参数,由于此种因果关系,流为因,势
为果,故把由于此种因果关系称为容性元件的积分因果关系。
2.3.2 因果关系及标注
因果关系是用画在键的一段并与键垂直的短划线来表示,该 短划线称为因果划。如图(a)所示。
A B
(a)
e f
(b)
A、B两个彼此键结的键合图元。它所表示的因果关系如 图(b)所示,对于键合图元A,势是产生流的原因。而对于键 合图元B,则流是因,势是果。
对于 S e ,流为因,势为果。对于 S f ,流为果,势为因。
因,流为果。因此,因果线应画在I的一 端上。
e
C
q
(b)
p
I
f
(c)
2.2 基本键合图元
(4)势源 S e
势源是有源键合元件,用来描 述环境对系统的势的作用。电路中 的电压源和机械系统中的压力源等 都可以用势源表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ga hwhc sa fe t e to rmo eig o y tm t l—n r y d m an . h y tm d lsmi r sa ay e n rp ihi n e ci o lf d l fs se wi mut e eg o is T es se mo a i l i i n lz d a d v o n h i at y
ee to c a i a y tm t l — n r y d man . o s l e t i p o lm,t e p e e u s e c n i o o h i i rt fb n lc r me h n c ls se wi mu t e e g o i s T o v h s r b e h i h r r q ii o d t n f r t e sm li y o o d t i a g a h o y t m s e p o e n e d n mi i i r y c n i o s f rt e ee n so o d g a h a e d rv d o h a i o o d r p fs se i x l r d a d t y a c s l i o d t n o lme t fb n r p r e i e n t eb ss fb n h m a t i h
第4 6卷 第 1 期
2 1 年 1 月 00
机
械
工
程
学
报
VO146 N 0. . 1 J n a. 201 0
J OURNAL OF M E CHANI CAL E NGI ERr NE NG
DoI 1 . 01J E.01 . 1 0 4 : 039பைடு நூலகம்/ M 2 0O .7
复杂机 电系统 动力学相似分析 的键合 图法术
王艾伦 2 刘 云 2 , ,
(.中南 大学 机 电工程 学 院 1 长沙 408: 10 3 长沙 4 0 8) 10 3 2 .中南大学 现代 复杂装 备 设计 与极端 制造 教育 部重 点实 验室
摘 要 :现 有 动 力 学 相 似 方 法 只 适 用 于 单 能 量 域 中元 件 ( 部 件 ) 或 的动 力 学 相 似 分 析 ,难 以对 复 杂 机 电 系 统这 类 多 能域 耦 合 系 统
s d dac rigt emo ea a s hoyb sdo o dga h T es l i l i so jr d l aa t ssc s u e t i cod ot d n l i ter ae nb n rp . h i a t r a o f o a p rmee uha n h ys mi r e t n y ma mo r
的动力学相似展 开研 究。基 于此 ,以适用于多能域系统建模的键合 图为工具 ,论述 复杂机 电系统键合 图相 似的前提 条件 ,推 导出键合 图各要素相似所对应 的动力学相似条件 。在此 基础 上,根据键合 图的模态分析理论 ,进行系统模态相似研 究,给出 系统频 率、振 型等主要模态参数 的相似关 系,从而提 出复杂机 电系统动力 学相似 的键合 图分析法 。 用该方法既能很容易地 利 导出系统 的相似要求 ,而无须知道各现象的物 理方程,又可 以实现用简单 的单 能域模型 系统来对 多能域 原型系统进 行动力模 型试验研 究,从而 为工程 中复杂机 电系统 的动力学相似研 究提供 新的方法 和思路。所提 供的算例 表明 ,该方法 在指导复杂机 电系统动力学相似设计及模型试验时,能快速 、简便而又直观地得到 系统相似所需满足 的相似条件 。 关键词:复杂机 电系统
A src:T eei igs lu e to s a nyb p l dt ted nmi s l i nls f lmet (r o o et w t b tat h sn mitd h d no l eapi y a c i a t aa io e ns o mp n ns i xt i i me c e oh miry ys e c ) h
W ANG l n ・ Aiu LI n ・ U Yu
(. olg f c aia a dEet cl n ier g C nrl o t iesy C a gh 10 3 1C l e h nc l n lc ia E gn ei , et uhUnv ri , h n sa 8 ; e o Me r n aS t 4 0
sn l -n r y o i ,a d h r a e i ge e e g d man n t e e r ma y i c l e n d f u t s wh n t e r t ie o su y h y a c i lr y f c mp e i i e h y a e u i z d t t d t e d n mi smi i o o l at lx
中 图分 类号 :T 3 1 P 9. 9
动力学
相似分析
键合图
模型试验
Bo r ph M e h d f rt na i i ia iy A n l sso nd G a t o o heDy m cS m l r t a y i f
Co p e e t o e ha i a y t m m l x El c r m c n c lS s e
2. y La r t r fM od m mplx Eq i Ke bo a o y o e Co e upme tDe i n a d Exte a uf c u i f n sg n r meM n a t rng o
Mii r f d ct n C n a S uhUnv ri , h n sa 10 3 ns o E u ai , et l o t ies C a gh 0 8 ) t y o r y t 4