基于ARM+DSP的数字搓盘机的设计与实现
基于ARM+DSP架构的嵌入式数字硬盘录像机主机系统设计

数 字技 术 ・
基于A M D P R + S 架构 的嵌入式数字 硬盘录像机主机 系统设计
陈 忠 泽 邓 贤 君
( 华 大 学 电 气 工 程 学 院 湖南衡 阳 4 1 0 ) 南 2 0 1
【 摘 要 ] 过 对 目 前 数 字 视 频 监 控 用 的 数 字 硬 盘 录 像 机 的 现 状 和 发 展 趋 势 分 析 , 结 合 当 前 图 像 处 理 、 网 络 嵌 入 式 技 术 的 发 展 , 通 本 文 提 出 并 详 细 论 述 了 基 于 ARM +DS 架 构 的 嵌 入 式 数 字 硬 盘 录 像 机 的 设 计 方 案 。 P
的设计。
2网络数字录像机 主机 系统 总体方案 的 模 拟 音 频 信 号 经 过 音 频 编 解 码 器 模 /数
要 求 系 统 实 时 处 理 16 路 复 合 视 频 ( PAL/ NTS 和 1 路 音 频 输 入 , 处 理 包 C) 6 在 其 后 放 置 R C 滤 波 器 。 放 大 器 和 电 阻 在 带 宽范 围内都 有噪 声 ,因此 ,带 宽越大 ,输 出噪 声 越 大 ,倍 噪 比 ( SNR) 低 。 图 3所 越 示 的 是 在 具 有 相 同 配 置 的 电 路 中 使 用 具 有 不 同 带 宽 的 放 大器 时 ,放 大器 带宽 与 噪 声 之 间 的 关 系 。为 限 制 附加 的噪 声 ,带 宽应 该尽可能 的窄。 在 传 感 器 之 后 使 用 RC 滤 波 器 来 限 制 带 宽 。 如 图 4 所 示 , 放 大 器 带 宽 为 3 0 Hz,输 入 噪 声 电 压 频 谱 密 度 为 l n 0M O V/
[ 关键词 】 字硬盘 录像机 视频 监控 ARM DS 数 P [ 中图分类号] TN9 2 【 文献 标识码】 A
基于ARM处理器的数控雕刻机控制系统设计

L 一 _ I 删 0 。 一 l _ P 一 A J盯 M 板 3 Z
’ … 一
停等 。雕刻软件根据设计图样和刀具 自动算 出刀具的运动位置 ,
即刀 位 点 , 将 它 们写 入 雕 刻 程 序 。数 控 系 统从 雕 刻 程 序 中读 取 并 刀位 点 之 后 自动 计 算 各个 坐 标 轴 的运 动 分量 , 连续 发 送 脉 冲 给 电 机 , 制 各 个轴 的运 动 , 以控 最终 完 成 图像 等 的雕 刻 。
数 控 装 嚣
C L PD
键 稚
图2
数 控 雕 刻 机 系统 硬 件框 图
22 数 控 雕 刻 系 统 硬 件 电路 图 . 221 P 总 线接 口电路 l_ Cl 数 控雕 刻 系 统 中 用 到 的 P 接 口芯 片是 C 3 5 这 款 芯 片 CI H6, 是 一 种 通 用 的 P 总 线 接 口芯 片 , 持 lO 端 口映 射 、 储 器 映 CI 支 / 存
摘 要
随 着 信 息 化 、 字化 、 数 网络 化 的发 展 , 字 雕 刻 机 也 朝 着 多个 方 向发 展 , 绍 了一 种 基 于 AR 处理 器— — C r x M3 数 介 M ot — e 的数 控 雕 刻机 系统 设 计 , 克服 了 以前 由 CP D 控 制 雕 刻机 所 引起 的缺 陷 , 整 个 系统 设 计 中 , M 处理 器 主要 是 协 助 上 位 L 在 AR
ห้องสมุดไป่ตู้
划 机 传感器 一 A C } 十 D —’控制引 一 + 嚣 帆
DC A
射、 扩展 R OM 以及 中断 操 作 。C 3 5将 3 H 6 2位 高 速 P 总 线 转 CI 换 为简 易 的类 似 于 IA总 线 的 8位 主动 并 行 接 口 ,用 于 制 作 成 S
基于ARM与DSP的切绘机运动控制平台的设计

持各种协议及多进程调度机制的优点; ARM 在人机接口、监视
LPC2214 外 部 NAND Flash 存 储 器 采 用 K9F2808U0C
控制、支持实时操作系统等方面具有强大的功能 ; DSP 的数字信 ( 16M) , 用于存储系统参数及加工指令程序; NOR Flash 存储器
号处理能力十分强大, 其在数据处理方面的能力是通用微控制 采 用 SST39VF160( 2M) , 用 于 存 放 操 作 系 统 代 码 ; PSRAM 采 用
FLASH PSRAM
双
TMS320F2812
口
R
DSP 控制模块
A
M
LPC2214 ARM 处理器
RS232 接口 并行接口 USB 接口
以太网接口 液晶显示模块
按键接口
CPLD 输出控制
X 轴伺服 驱动器
Y 轴伺服 驱动器
X 轴伺服 电机
Y 轴伺服 电机
X 轴运动部件 Y 轴运动部件
设备驱动程序 RTLinux 嵌入式操作系统
( 3) 进给速度极限值、手动快速值、点位进给速度值等均作系 统参数由用户设定, 以获得适合具体控制对象的最佳运动参数。
( 4) 经过输入、输出接口板的输入、输出信号, 可操作诊断方式 键进行诊断, 以确定故障部位出自机床强电部分还是系统部分。 系统有 20 多种报 警 信 息 , 当 系 统 发 生 故 障 停 机 时 , 自 动 发 出 报
3.4 3 级中断服务程序
警信息, 操作有关按键, CRT 说明发生故障的原因。
3 级 中 断 主 要 完 成 CRT 显 示 处 理 , 如 果 没 有 其 它 各 级 中
( 5) 该系统是针对激光加工机的控制要求设计的, 只要系统
基于DSP和ARM的车载组合导航计算机设计
收稿日期:2010-08-08作者简介:龚柏春(1987—),男,江西南昌人,硕士研究生,主要研究方向为惯性导航与组合导航。
基于DSP 和ARM 的车载组合导航计算机设计龚柏春,李岁劳,颜开思,马戎(西北工业大学自动化学院,陕西西安710129)摘要:为了满足项目中对导航系统的小型化、低成本以及高精度等要求,设计了基于DSP 和ARM 构成的车载双核嵌入式导航计算机系统。
采用DSP 作为导航解算计算机,完成导航数据的快速融合与解算处理;采用ARM 处理器负责系统级的控制和部分数据的采集;采用CPLD 完成其他导航数据经V /F 后的采集、译码和控制以及时间对准。
通过USB 接口实现大容量数据存储,通过双口RAM 实现双CPU 通信。
实验结果表明,该系统达到了预期的设计要求。
关键词:导航计算机;DSP ;ARM ;CPLD ;V /F中图分类号:U666.12+5文献标识码:A 文章编号:1000-8829(2011)07-0101-04Design of Vehicle Integrated Navigation Computer Based on DSP and ARMGONG Bai-chun,LI Sui-lao,YAN Kai-si,MA Rong(School of Automation,Northwestern Polytechnical University,Xi an 710129,China)Abstract:To meet the requirements of integrated vehicle navigation system,an embedded navigation computer system based on DSP and ARM was designed.The system adopted DSP as navigation computer to complete rapid fusion and calculation of navigation data.ARM CPU completed the system-level control and the acquisi-tion of GPS and image information etc.CPLD completed some decoding,control and the acquisition of other navigation data after V /F.Large amounts of data were stored through the USB interface of S3C2440A,DSP communicated with ARM via dual port RAM.Experimental results show that the system can meet the design re-quirements.Key words:navigation computer;DSP;ARM;CPLD;V /F 导航计算机是导航系统中的核心部件,国外对我国是进行技术封锁的。
基于DSP的嵌入式数字硬盘录像机的硬件设计

邓 贤 君 朱 志 亮
科
基于 D P的嵌入式数字硬盘录像机的硬件设计 S
(、 1 南华大学通信工程 系. 南 衡 阳 4 10 2 温 州大学物理 与电子信息工程学院, 湖 201 、 浙江 温州 3 53 ) 2 0 5
摘 要: 本文提 出了基 于 T 3 0 M6 8的数 字硬盘录像机的设计方案 , S 2 D 4 详细介绍 了嵌入式数字硬盘录像机硬件设计。本 系统经 多次现场测 试。 效果 良好 , 符合 实际应用的需要 。 关 键 词 :3 2 1A; 字 硬 盘 录像 机 ; MS 2 D 4 ; 频 监 控 ¥ C 50 数 T 3 0 M6 8
1 述 概 频、 网络 、 信号处理环境。 数字硬盘录像机 , 英文名称为 Dg a Vdo 目前 D 6 8可应 用 于 i t i il e M4 R cre, eodr简称 D R, V 它是视频监控系统中重要的 I 频 电 话 ( d P P视 Vie I o 设备, P oe、 O ( ie n hn )V D Vd O o mad 、 机。 前l盘录鬃乩 牛 目 匝 架构 E 分主要分为工控 De n ) 机 顶 盒 式硬盘录像机( 或者工控硬盘录像机或者 P 式硬 (e U oe)视 频 监 C St pB xs、 — 盘录像机 ) ^式硬盘录像机, 、 嵌 从压缩算法来分有 控数字录像机等开发系 小波压缩 。J E MP G ,I 4等。目前工控式 统 ,I M P G, E 4I - 26 T 公司提供了相应的 图 1 主控 制模 块 设 计 框 图 硬盘录像机和嵌入式硬盘录像机所占市场比重差 船 D 4 8 留了 M6 保 不多,由于嵌 人 式硬盘录像机的稳定性及易维护 C X 4 6 原有的内核结构 , 工作频率由内 部倍频器设 口 出。 性, 选择嵌 入 式硬盘录像机的用户会越来越多, 市 置 , 可以达 到 7 0 H 、 0 H 或 90 H , 2 M z 0 M z 0 M z相应 8 T P 4 V 5 5 A具有 4 1 个通道 , 每个通道均为具 场前景非常大。基于这种应用背景, 本文提出了 嵌 的时钟周期为 19 s1 5 s 1 s每秒可执行 有可编程多态换算器 ( l o h a r的独立 3 n、2 n 或 .1 , 1n p y r i s l) om p c c e 人武融 录像机的设计 思路和实现方案。 指令数 5 6 、4 o 7 0 MIS 7 06 o 和 2 0 P 。此外 D 4 8片 解码器, 萌 M6 可j 过嵌 入 式同步模块将 N S 、A T C P L或 2系统 总 体方案 上带有 5 个双通道( B两通道 ) A、 数字视频 口( P S C v E AM视频信号转换成 8位 IU R B . 6格 — T 5 r 6 2 . 1技术指标 口)可同时处理多路数字视频流, 匕 , 片 带有多通道 式 , 或使用分立同步模块使输出格式为 8位 4 : 2 "。 2 本系统的主要技术指标如下 : 串行音频接口,可同时处理 l 路立体声输入, O 输 5P B设 计 C 视频输 入:6路复合视频输 入P LN S 1 A /TC 出音 . 号。 f 言 本系统的主频高达 1 M z 属于高频系统 , 6 H, 6 视 频输 出 : 复 合视 频输 出 P I T C 2路 A s 4{J 块原理设计 亥 所以在进行 P B的设计时, 保证信号的完整, C 为了 (N B C接 口,. p P 5 ) 1V -, n 0 7 可以划分以下 在设计的时候采用了如下方法: 音频输出:6路音频输 ^2 — 0 mv0 1 0 10 lK .= 『 L : 主控制模块 ;视音频采集 、 a h 压缩 5 . D AM 的时钟线, 1对 DR 尽量走短线 , 而且 模块;视 预 览、 c 回放模块; 块( 电源、 存 到两个 D R M 的长度尽量做到相等; n CA ) DA 音频 输 出 : 2路音 频输 出 ,0 10 v Kn 储器扩展 、 2—0m, l 网络传输、 逻辑控制等) 。 5 L S 等其f夕 不要直接与数据和地 2F A H 电 } C ) A 本文详细介绍主控制模块和视频处理模块的 址 总 线 连 接 ,而 是 通 过 缓 冲 芯 片 ( 如 2 2设计方案 设 计。 S 7 L T 6 4 B 连授 ; N 4V 1251 根据系统要求的技术指标 , 本文没计的 l 路 6 4 . 1主控制模块 5 3高速总线 E 串人了小阻值电阻 阻值大小 嵌入式 D R系统硬件部分采用了主从式双 C U V P 对整个系统任 通过 Po l r e软件仿真得到, t 同时对线路 进行了阻抗 架构模式。主 C U选用 了AR 处理器 , P M9 具体型 务的运行进行分配与调度 。¥ C 50 3 2 1 A本身内置 限制 。 号为三星半导体的 ¥ C 5O , C U选用 D P P I 3 2 A 从 P I S C 控制器 , 5个 P I 口可分别和 2 C接 个音 , 视频 6结论 处理器具 体型号为美国德州仪器( I T) 的多媒体处 压缩模块, 个图象预览,回放模块, 个数据存储 1 2 本系统最主要的创新点有以下两点: 理芯 片 T 3 0 M6 8 MS 2 D 4 。主从 C U之间 通过 P I 模块连接; P C 再加上它已有的串口, S U B接 口, 网络接 61 .在系统硬件架构上, 采用了主从C U的架 P 总线进行通讯。 口,O等组成整个系统的控制模块。 I / 它的 路 构 , C U和从 C U分工明确 , 主 P P 充分的发挥 了它 所示 。 整个系统的工作流程设计女下:系统上电或 如图 l _t l 们各 自的处理优势; 复位后, C U¥ C 5 0 主 P 3 2 1A从 Fah加载程序, l s 完 4 视音频采集 , . 2 压缩模块 视音频处理方面 , 选用了 耵最新推出的数 成对芯片的初始化和外围硬件的配置, 之后从 C U P 视音频信号处理的流程如下 :模拟视频信号 字多媒体处理器 T S2D 68采用高效率的 H M 30 M , 4 T s2D 68 M 3 O M 4 便开始进行图像采集。从 C U通 先经视频解码器 T P 14 P V 5 5 A转换成 8位 Y V数 2 4 U 6 压缩标准,实现了多通道的视音频数据处理, 过I 2 对系统中的 C口 视频解 码芯片进行控制, 将从 字视频信号 再送至 D 6 8 M 的视频输入接 口 可以充分的满足市场需要 ; 4 . 摄像头采集到的模拟视频信号转换为数字视频信 模拟音频信号经音频 A D转换器 P M10 转换 C 81 参考文献 号, 送人 D 4 M6 8的视频通道 P端 口)同步采集到 为 I ; 2 S格式的音频数据, 进人多媒体压缩芯片的 [ m u g Eet nc o d 3 2 1A 3 一 1 sn lc ois CLt  ̄a r .¥ C 5 0 2 DM 4 T S C R0C S ES OR ER US 的漠 拟音频信号 经过音频编解码器模 / 数转换后 , 音频输入接 口, 6 8将原始的视频和音频数据 BI RI C MI R0P 送人 D 6 8 ̄ M 4 I (c S 端口 。 M 4 将 分别进行压缩, M AP )D 6 8 再把压缩视频流和压缩音频流进 MANUA12 03 ,0 . 接收到的数字视频信号和数字音频信号数据分别 行 同步 复 合 ,产生 I24 视频 复 合 流 .一 片 [tx nt m nsIcroae T 3 0 M6 8 -6 I . E ea Is u e t noprtLMS 2 D 4 / s r c 进行压缩, 再把压缩视频流和压缩音频流进行同 D 4 8可以同时产生 8个视 , M6 音频通道的 H2 Di a d a Pr c s o,0 7 2 0 . . 4 6 st Me i o e s r 0 - 0 9 l 2 步复合, 产生 I2 4视频复合流 , -6 1 . 再通过 P I C 总线 复合数据流. M 4 把每个视 / D 68 音频通道的复合 f苏东. AR 3 】 主流 M嵌入式 系统设计技术与实例精 上传给主 C U 主 C U P , P 将从 P I C 接口收到的数据 视频数据在片外 D R M的数据缓冲区中排列成 解帆 北京: DA 电子工业出版社 以文件的格式存储到本地硬盘 , 日 供 后调用 ; 同步 固定长度的数据包. 当缓冲区内的数据量超过一 f王 跃 宗.MS 2 D 4 S 用 系统设 计 与开 4 ] T 3 0 M6 2D P应 将复合数据流传送给图象预览芯片进行显示。 定 的阀值, 它就通过 P I C 中断向主 C U发 出请 发 北京: P 人民邮电 ̄ d 2 0 , & 0 91 . 3 M 30 M 4 数字信号处理器简介 S2D 68 T 求, 当中断被响应时, C U 从包缓冲区内将数 主 P 作者简介 : 邓贤君(9 1)男, 18一 , 湖南郴州, 南华 T 30 M6 8 耵 公司于 2 o MS 2 D 4 是 0 7年推出的 据取走。 大学电气工程学院通信工程系, 讲师。 主 要研究方 款高性能的 3 位定点 D P主要面向数字媒体 2 S, D 68具有 5 M 4 个视频端口, 支持多种分辨率 向为嵌入式应用, 移动通信技术, P应用。 Ds 应用, 属于 C 0 0 60 系列 D P 此款芯片带有丰富的 和标准, C I 6 1Iu 6 6B .12 So 如 C R 0 、 —B 5 、T 0等, T 1 朱志亮(9 2 )男, 18 ̄ , 浙江温州, 温州大学物理 视音频硬件资源,具有网口、C 接 口、 P 接口、 每个端口为 2 bt PI HI 0 i位宽, 可以被灵活的配置为—个 与电子信. r 学院, g_ 4 ̄ 讲师。主 要研究方向为信号 1C接 口、 2 串行 口等多种接 口, 可广泛应用于视音 2 /6 i或两个 1/bt 01bt 08i通道。同时, 每个端口都 与信 息处理 。
基于DSP的数字化舵机系统软件设计与实现
基于DSP的数字化舵机系统软件设计与实现摘要本文主要介绍了一种基于数字信号处理器(DSP)的数字舵机控制器的软件程序设计方案。
所选用的DSP为德州仪器公司的TMS320F2812,该DSP在电机控制应用上进行许多优化设计。
相对于传统的采用单片机或其它微处理器的控制器,采用DSP可以使程序实际更简单,同时可以实现更复杂的算法。
本文主要讨论了DSP与有刷直流电机的之间的PID控制算法及软件实现,对数字舵机控制器的设计有较大的工程价值。
关键词:舵机控制器,DSP,有刷直流电机,PID控制Software Design of Digital Servo Controller Based on DSPAbstractThis paper presents a software design of Digital Servo Controller system. The DSP used in the design is TMS320F2812 produced by Texas Instrument (TI TM) which has been greatly optimized for motor-control application. Compared with the traditional controller based on microcontroller or other microprocessor, using DSP can simplify the software design of the controller system, and realize more complex algorithm.This paper mainly discussed the algorithm of PID and its realizition between DSP and brushed DC motor, and supplies the reference for the design of Digital Servo Control system.Key Words: Digital Servo Controller, DSP, BDC, PID目录1 引言 (1)1.1 概述 (1)1.2 课题研究背景 (1)1.3 国内外相关技术的发展状况 (1)2 舵机系统介绍 (5)2.1 事件管理器 (5)2.2 电机简介 (7)2.2.1 电机的分类 (8)2.2.2 有刷直流电机工作原理 (9)2.2.3 电刷和换向器 (9)2.2.4 基本驱动电路 (10)2.2.5 速度控制 (12)2.2.6 反馈机制 (12)2.2.7 传感器反馈 (13)3 部分硬件电路 (15)3.1 光电编码器输入电路 (15)3.2 功率放大电路 (15)4 数字舵机系统软件程序设计 (18)4.1 系统流程图 (18)4.2 QEP编码模块 (20)4.3 速度计算模块 (24)4.4 BDC PWM产生模块 (28)4.5 PID控制器模块 (31)4.6 系统测试说明 (34)5 附录 (41)附录1:数字化舵机控制器软件设计主程序 (41)6 总结 (48)致谢 (51)1引言1.1概述舵机是一种位置伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。
基于ARM_DSP架构的新型智能仪器开发
在 Linux 中以模块的形式来加载设备, 在加载 模 块 时 , 需 要
调 用 入 口 函 数 init_mod ule , 而 在 卸 载 模 块 时 , 需 要 调 用 e x-
it_mod ule 。设备驱动程序通过 file _op e ra tions 数据结构提供访
问设备驱动的函数, 对于 SPI 这种字符型设备, 需要在驱动中实
r_SPCON0 = iore ma p (0x59000000,4)V
/ /SPI re g is te r
r_SPSTA0 = iore ma p (0x59000004,4)V
r_SPPIN0 = iore ma p (0x59000008,4)V
r_SPPRE0 = iore ma p (0x5900000C,4)V
备接口, 可用于外扩 USB 打印 机 等 USB 主 机 设 备 ; 片 内 包 括 3
个 UART, 通 过 电 平 转 换 芯 片 SIPEX3232 扩 展 串 口 ; 为 了 实 现
大容量数据的存储, 可以借助于片内的 SD 卡接口扩展 SD 卡,
或者通过 S3C2410A 开放的数据和地址总线结合通用片选信
无 相 位 延 时 的 下 降 沿 、有 相 位 延 时 的 下 降 沿 、无 相 位 延 迟 的 上 升
ห้องสมุดไป่ตู้
沿和有相位延迟的上升沿。图 4 为无相位延时的下降沿的 SPI
时序图。
图 4 无相位延时的下降沿的 SPI 时序
主从机通信的基本流程如下: 主机通过发出 SPICLK 信 号
来启动数据传输, 此时从机发送伪数据, 从机通过中断方式来接
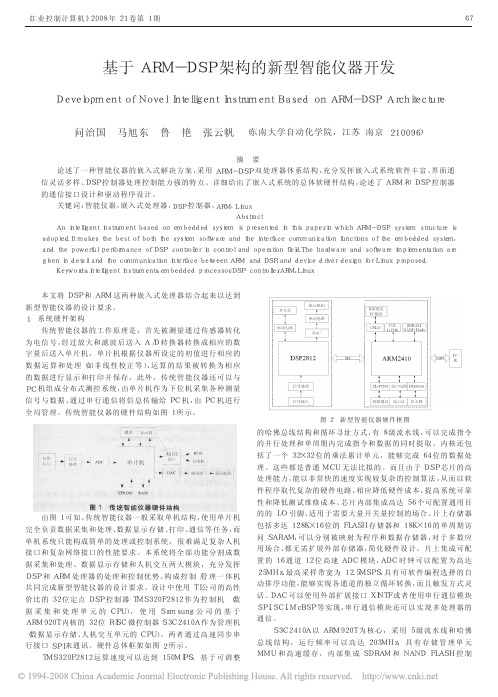
本文将 DSP 和 ARM 这两种嵌入式处理器结合起来以达到 新型智能仪器的设计要求。 1 系统硬件架构
基于DSP和运动控制芯片的转台伺服控制设计

基于DSP和运动控制芯片的转台伺服控制设计随着现代工业自动化程度的不断提高,越来越多的设备需要实现高速转动并保持精准定位。
传统的基于机械传动的控制方式已经难以满足这种需求,而基于数字信号处理(DSP)和运动控制芯片的转台伺服控制成为了当前较为流行的控制方式。
该控制系统主要由DSP和运动控制芯片、电机和传感器等组成。
其中,DSP作为中央控制单元,负责接收来自传感器的反馈信号,并根据预设的运动规划算法进行控制,控制芯片则通过控制电机实现高精度、高速的转动。
在该控制系统中,反馈信号的采集和处理十分重要,基于光学原理的光栅尺和脉冲码盘成为了常用的选择。
当光栅尺或脉冲码盘与电机轴线相连时,传感器会持续对电机转动的速度、位置和加速度进行监测,将数据发送到DSP进行分析处理。
而在控制算法方面,PID控制器是应用最广泛的控制算法之一。
在PID控制器中,通过对反馈信号与预设信号的比较,计算误差,反馈给系统,并计算控制信号来调整电机的位置和速度,从而使电机实现精准控制。
除了PID控制器,其他控制算法也可根据具体场景进行选择。
此外,在该控制系统中,电机的选择也非常重要。
常见的电机类型有步进电机和伺服电机,它们各有优缺点。
步进电机相对简单,成本低,但其控制精度以及速度上都相对较低;伺服电机性能相对较优,可实现高速、高精度的控制,但相应的成本也更高。
总之,在基于DSP和运动控制芯片的转台伺服控制设计中,精准的传感器、优秀的控制算法以及适合的电机,都是实现高效、精确定位控制的必要条件。
随着技术的不断进步,相信该控制方式将在工业自动化控制领域中得到广泛应用。
为了更好地进行数据分析,需要明确数据来源和采集方法。
在这里,我们假设数据来源为某公司运营数据,采集方式为鼠标点击和键盘输入记录。
首先,我们可以列出以下相关数据:1. 月度销售额:包括每个月的销售额、同比增长率以及环比增长率等指标。
2. 产品类别销售额比例:分析不同产品类别的销售额比例,以及各类别的销售额排名。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m il u e o rai h u i s n l po e s g a o tm , ic d g te t t t ( h n n e p u a y sd t e z te a d i a r si l r h s n l e o g c n gi n l i h i s e h ea  ̄ g t o bt u n me r c m
数 字 搓 盘 机 由获 取 D 动 作 的缓 动 盘 、 调 控 制 J 音
ቤተ መጻሕፍቲ ባይዱ
格式 ,如 C — A, 3 A C,T A WM WA D D MP ,A A R C, A, V等 。
器 件 与 电 路
圃
囿响 ⑥6@凹 0 ,
文 章编 号 : 0 2 8 8 (0 0 0 — o 0 0 10 - 6 4 2 1 )1 0 4 — 5
论 基于 A M+ P的数 字搓 盘机 的设 计与实现 文 ・ R DS
・
杨 洁 . 双 田 李
( 中国科 学 院 声 学研 究所 ,北 京 1 0 9 ) 0 1 0
YAN Je,L h a g t n G i IS u n —i a
( stt o cut s hns cdm fSi cs e ig 10 9 ,C ia I tue fA os c,C i eA ae y o c n e ,B in 0 10 hn ) ni i e e j
今天 , 多音乐都 以数字形式进行存储 和生产 。 许 音乐可
以存 储 在 不 同 的存 储 媒 体 。包 括 串 行 A A 器 件 、 D T C/ C — / D R 盘 、 FU B闪 存 卡 等 ; 乐 可 是 不 同 的 D RC — W C /S 音
2 数 字搓 盘机 构 成 及 原理
音 调 滑动 杆 来 直 接 改 变 唱 片 的转 速 ,从 而 改 变 音 乐 的 重 放 速度 ; J 可 把 手 放 在 搓 盘 机 的 顶 部 ,来 回搓 动 D还 唱盘 、 接 控 制 音 轨 的 位 置 。这 两 种 主 要 方 法 使 D 直 J可
能仿效专业 D 黑胶模拟搓盘机感觉和风格的数字掳 J
音乐 人 ) 的操 作 需要 。
【 键 词 】搓 盘 机 ; 动 盘 ; 关 缓 音调 滑 动杆 ; 变速 不 变调 【 图分 类 号 】T 9 2 0 中 N 1. 2 2 【 献标 识 码 】A 文
D s n a d I lme to ii l u na l B sd o U + P ei n mpe n fDgt r tbe ae n AI DS g aT
p cs n ,jgda,tm ocn o sdr C o r es g o i i l e p ot l l e,L D,K y pesa dohrm m r s sd s n d ad ra zd D P i r i e— rs n te e o e ,i ei e n ele . S s i g i
盘机。
确保 在 现 场 演 出时 音 乐 流 畅 没 有 停 顿 ,并 把 不 同节 拍 的音 轨混 合 在 一 起 , 作 出有 自己 风格 的音 乐 。 创 目前 社
会上 的 主流 搓 盘 机 仍 然 是 黑 胶模 拟搓 盘 机 。黑 胶 搓 盘
图 t 黑胶 搓 盘 机
机 只 可 对黑 胶 唱 片 进 行 操 作 。在 数字 技 术高 速 发 展 的
CD R C R ,t e f s - / D- W h a h, a d oh r me r e ie ,a d s p o n s o mas s c a l n t e mo y d vc s n u p  ̄s ma y mu i fr t , u h s CD- A ,MP c D 3,
AAC , W M A , W AV.
【 y w rs una l; o il e p o t l l e;t esec Ke o d 】trt e jgda;t ocnr i r i t th b m o sd m r
1 引 言
搓 盘 机 ( rt l ) 专 业 D 必 需 的设 备 , l t n b s是 u ae J 图 所 示 为传 统 的黑 胶 搓 盘 机 。 J 通 过 对 搓 盘 机 右下 侧 的 D 可
【 要 】设计并实现 了一款基 于 A M和 D P的数字搓 盘机 。 摘 R S 该数 字搓盘机 不但 实现 了传统模拟搓盘机 的各项功
能, 而且 增 加 模 拟 搓 盘 机 无 法 实 现 的 变速 不变 调 等 功 能 。该 数 字 搓 盘机 支持 C /D RC — W 光 盘 、 S 闪存 盘等 D C — /D R UB 存 储 设 备 , 持 C — A, 3 A C, A, V 等 多种 音 乐 格 式 . 全 满 足 了 D ( i oky可 理 解 为 搓 动 唱 片 的 支 D D MP , A WM WA 完 JDs jce , c
【 b t c】A kn fd i ltrt l bsd o h S n R A s a t i o i t u a e ae nte D P ad A M,w e h R sue o cn o te sro r d ga n b h r te A M i sd t ot l h ev e r