重型数控机床静压导轨可动结合部动力学建模
大重型机床静压导轨的静态性能及油膜流体仿真研究

tetrtbe id o w e aeue hsds , c R / F U N .rm e ds D h una l K n so s a sd i ti ei s h a P O E,L E TFo t ei o 3 . f f r r i n g u s n h n g f m d l dteit n re dm nin f w aayi adc c l i s i pesr g i oa a s , o e n ra t e - i e s al n s n a ua o o t c rsue u et n l i n a h e lh ol o l s l t nf a t d ys fo tetert a c c l i n i l in ia a zs h t i p r  ̄a c dtel ] wfed rm h oe cl a ua o a ds a o , n ye es t e o n ea a o l l h i l t n mut t l t ac f n h wf o i
G n d N e h o g o,t, aj g2 0 , hn ) og aC CT c nl yC .Ld N ni 0 9 C ia o n 1 0
数 控转 台承受偏 载荷 的 问题 提 出了在 转 台轴 向布置平 面导轨 的 方案 。在 以
改造 , 变静压 导轨 的 结构 , 用新型 的供 油 方式 , 新 式导轨 运 用在 转 台 改 采 将 O E及 C D仿 真分析软件 F U N 从 导轨 以及 油膜的三 维模 型设计和 导轨 / F L E T,
静压导轨在重型机床设计中的应用_赵玉梅
如何做好反身动作? 把握反身动作的尺度至关 重要, 是每一个习舞者必须掌握的。在训练过程中 常见的错误有以下几点:
一是忽视或没有反身动作, 导致动作生硬、不连 贯, 转度不够不到位, 影响下一舞步的运作。
二是利用腰部以上, 甚至用肩膀和手臂机械地 转动身体来完成 CBM, 从而导致男女舞伴技术和身 体姿态变形。改正方法: 正 确的 CBM 应来自于体 内, 在自然的呼吸过程中加之主力腿膝盖的扭动, 从 容协调地完成身体转动。这样不仅可以使男女舞伴 的架型不变、姿势优美, 而且还可使他们保持良好的 身体位置和身体相关位置。
8) , 这样就可准确把握好反身动作的尺度。b. 动作 结束时身体要预留下一动作的反身动作转动角度。 如 NAT U AL . SPIN T U RN 的第三 步结束时, 脚尖 指向逆舞程线方向, 但身体背向斜中央, 而不是背向 舞程线, 这 样 有利 于 下 一 动 作 的衔 接, 充 分利 用 CBM 使动作与动 作之间连贯、流畅。CBM 往往在 垂直位于主力腿运作, 它稍先于动力脚出步之前或 几乎二者同时开始, 但它结束于这一舞步运行停止 之前, 不可在舞步运行停止后还继续 做 CBM, 否则 就犯了 CBM 身体转度超过动力脚运行方向的错误。
Zhao Yumei
( T angshan H uading M echanism M anuf act ur ing, T angshan 063020)
Abstract: In this paper, the wo rking pr inciple as w ell as the ty pe, the adv ant ages and disadvantages o f hydro st atic g uidew ays ar e discussed in detail. M or eover it put s for war d a new idea about the application o f hy dr ostatic guideway s in designing heav y- duty cutt ing machines.
机床导轨结合部的有限元模型

1 结合部特性影响因素的处理方法
由于结合部的影响因素很多 , 单纯依靠解析 或实验方法均不能全面考虑这些影响因素 , 而且
[3 ] Sinha R , Paredis C J J , Gupts S K, et al. Capturing Ar2 ticulation in Assemblies from Component Geometry. The ASME Design Engineering Technical Confereces ,Atlanta , Georgia , USA ,1998 [4 ] Sinha R , Paredis C J J ,Liang V C , et al. Modeling and Simulation Methods for Design of Engineering Systems. ASME Journal of Computing and Information Science in Engineering , 2001 , 1 (1) : 84~91 [5 ] 刘振宇 ,谭建荣 ,张树有 . 面向虚拟装配的产品层次
δ=
v w
e δ = N
( 3)
e δ = { u1 v1 w1 u2 v2 w2
… u6 v6 w6 } T
N = [ N1 I N2 I N3 I - N1 I - N2 I - N3 I ]
式中 , I 为三阶单位阵 ; N 为相应的插值矩阵 。
在自然坐标系下 , 相对位移向量为
e δ δ = TN δ ′= T
( 4)
2 导轨结合部的有限元建模
机床的整机分析模型中 , 一般结构及导轨的 实体部分可以用三维实体单元模拟 , 接触面间的 接触特性则需要建立合适的接触单元模拟 。 本文 采用六结点的等参数单元模拟结合部的接触特 性 [4 , 5 ] 。 图 1 是六结点等参数单元在自然坐标下的母 单元的形状和直角坐标下的形状 , 单元的上下表 面分别覆盖在导轨的上下接触面上 , 结点与实体 单元的表面结点重合 。
数控机床液体静压导轨结构的优化设计
数控机床液体静压导轨结构的优化设计摘要:数控机床的导轨性能对数控机床的加工中心有着直接的影响,常规材料制造的机床导轨产生的动力学与热力学无法满足现代的高精度零件加工,为了提高数控机床的加工精准度,采用液体静压导轨并对导轨进行了改进。
本文以某型号数控机床加工中心的液体静压导轨为研究对象,并对液体静压导轨进行了改进,通过合理的数据假设进行设计,从而增加数控机床加工的精准性。
首先强化液体静态导轨的内部结构,其次对数控机床液体静压导轨的性能进行分析,最后针对液体静压导轨表面进行设计,将U-V形沟槽与V形沟槽进行减阻对比。
实验模拟结果表明:液体静压导轨的静压变形最大值较小,导轨油垫进行了完善设计;U-V形沟槽在减阻上面有着显著的效果,可以有效地改善液体静压的综合性能,并对数控机床的导轨设计提供参考意见。
关键词:数控机床;液体静压导轨;结构设计引文:随着现代化发展越来越快,人们对生活和工作的现代化产品要求越来越便利,导致现在产品的做工需要更加精密,因此各行各业对精密数据机床的需求更加地迫切。
在这样的大环境下,我国科研人员研究出了具有独立产权的精密数控机床,并以此为基础进行了改进和完善,本文以液体静态导轨作为研究对象,通过对导轨的改进提高切削功能与刀具的寿命,并在导体表面进行了合理的设计和完善,采用对比手段进行对照,得出最佳的液体静态导轨设计方案,从而提高数控机床中心加工技术的精准性,为推进现代化科技发展奠定基础[1]。
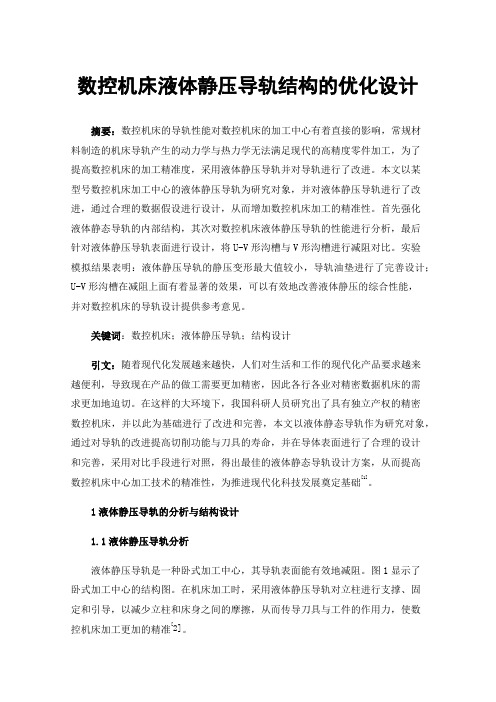
1液体静压导轨的分析与结构设计1.1液体静压导轨分析液体静压导轨是一种卧式加工中心,其导轨表面能有效地减阻。
图1显示了卧式加工中心的结构图。
在机床加工时,采用液体静压导轨对立柱进行支撑、固定和引导,以减少立柱和床身之间的摩擦,从而传导刀具与工件的作用力,使数控机床加工更加的精准[2]。
图1 卧式加工中心结构示意图例如,在一个经典的车床加工过程中,其主要的加工程序中:切削量f=0.5mm/r,则切削速度 vc=150 m/min,其它的参数都是通过参考相关的设计手册得到的。
精密数控车床静压导轨性能仿真研究
随着 现代机 械零件 精 度要求 的 日益 提高 ,我 国 航空航 天 、能 源 、军工 、汽 车制 造业 等行业 领 域对
2 D l n Ma hn o l a tr . ai c ieT o coy,Dain La nn 6 2 a F l io ig1 6 0.C ia ) a 1 hn
Ab t a t sr c :T e a c r c f r cso c ie tos w l b e u e y t e p o ttc p r r n e o h y r s t u d w y h c u a y o e iin ma h n o l i e r d c d b h o r sai e o ma c ft e h d o t i g i e a , p l f ac
到各设计 参数 的最优取 值。 关键 词 :静压导轨 ;油腔压力 ;静态性能方程 ;承载能力 ;静刚度 中图分类号 :T 59 3 G 1. 文献标识码 :A 文章编 号 :10 — 8 1 (0 2 0 1 3 8 2 1 )5— 1 4 0 4—
The Pe f r a c i l to t y o h d o t tc Gui wa fPr cso CNC t e r o m n e S mu a i n S ud ft e Hy r s a i de y o e ii n La h
a d t i f c o c u a y o a h d s n p rmee l b n lz d a d c n i e e i i e in sa et s ea c r c q i - n h sef t ra c r c fe c e i a a t r l e a ay e n o sd r d w t n d sg t g a  ̄e t c u a yr u r e f g wi h os h e e me t T ep e s r o u ao e p c e a e v d b s d o esr s h a trsiso eg i e a n eh d o y a c . T e n . h r su e fr l f h o k t sd r e a e n t t sc a ce t f u d w y a d t y r d n mi s h n m t w i h e r i c h t h t eb a n a a i omu aa d si n s r l r sa l h d b s d o e t co h r ceit q a in a d a smp i e d l a h e r g c p ct fr l n t f e sf mu awe ee tb i e a e n r s i trc aa t r i e u t i l d mo e s i y f o s r sc o n i f w b i . T e if e c so e i aa tr ft eg ie y a d te r sr tro e s t e o ma c f e h d o t t u d wa e e u l h n u n e f sg p r me e so u d wa n h e t co n t t i p r r n e o y r sai g ie y w r t l d n h i h ac f h t c smu ae y Malb te o t ld s a a tr a u swe e g t n i l td b t , h p i e i p r mee sv e r o t . a ma n g l e Ke wo d : Hy r sai u d wa y rs d o t t g ie y;P c e r su e S ai ef r a c q ain;Be tn a a i ; Sa i t n s c o k tp e s r ; tt p ro c m n ee u t o a g c p ct i y tt si e s c f
大型数控转台圆形静压导轨的刮研方法
人 型 数 撺 转 f} ·般 采 川 乐 哉 … 度 高 、 luJ转 精 度 高 、运 转 稳 的 旆 导 轨 , 静 轨 的 汕 膜 f 度 乃 r增 加 其 … , 一般 l仃 0.03~0.06mm,所 以 zIf导轨 ff『i的 JJl1 l 度 要 求 较 高 。 I{】i;『,静 J
9Lf19加 r 发 备 人矧5厄法 满 足精 度 嘤 求 , 一般 果 川 埘 6J『的 加 工 办 法 求 f ij_F。 本 文通 过 伙 践 总 结 …
· 和}11fJll肜导 轨 的 l J们f i。
1.数 控 转 台底 座 静 压导 轨 平 面度 的 测 量与 调 整
人 , 数 控 转 f I,10 J 座 一般 k 度 2m以 』 … 性 较 芷 ,
, 通 过 埘 f:式 _ JJl】I:技 术 的 研 究 , … 驯 杯 JJ ,找 到 r
的 JJlJ工签 数 ,摸 索 ¨{r ·条 新 的 柴 }III饥缸 体 【I{I轴 扎 7JI1工 方法 , 为 川 炎零 ¨:的 加 J 提 供 了何 效 的 l 艺 鉴 于段 , 伏 际 牛 产过 稃 II1仃较 人的 指 导 意 义 。 同时 ,
点 『J1.…: 制 造 }支术 与装 备 l 场 , 1999 (S1) 轨道 辆 制 造 ㈨ 0研 究 与应 川…. 加 丁 (冷 加 【 ),20l6 (1) :66—
68
【3l张 卡7} l 式 加 术求 金 切削 J J『l I 发展趋 势 之 ‘IN1.LI1 国丁 、I¨}{,2003. MW (收 稿 日期 :2()l 7II 23)
所以 、r 度的 误 差 为 :
0.056 t 0.06=0.I】6m m
导轨结合部动力学建模仿真与试验研究
δ1
将丝杠分为两部分,所以轴向刚度由两部分的轴承与丝杠先串
γo δ2
联,再并联,最后与丝母组件串联构成,所建立的相应滚珠丝杠副 的动力学模型,如图 5所示。
由此可得,进给系统的轴向刚度可由下式计算得:
图 4 单个滚珠变形图 Fig.4 Single Ball Deformation Diagram
2 2 k=
型力传感器等)其测试系统组成连接,如图 6 所示。实验现场拍摄 照片,如图 7 所示。这里所涉及的激振试验旨在于获取较为准确 的固有频率及相对应的振型,并和 ANSYS 建模仿真的结果作对
于导轨滑块刚度的计算,在计算螺母副刚度时需考虑由丝杠螺旋 比,验证所建动力学模型的准确性。
升角所引起的接触力与弹性变形量的变化。
Dynamic Modeling Simulation and Experimental Research on Guideway Joint
LI Wei-yu1,JIANG Wan-sheng1,ZHAO Wan-hua2
(1.Northwestern Polytechnical University School of Mechanical Engineering,Shannxi Xi’an 710072,China; 2.State Key Laboratory for Manufacturing Systems Engineering,Xi’an Jiaotong University,Shannxi Xi’an 710049,China)
在垂向的变形量得,即:kz =Fz /δz
(1)
式中:Fz —作用于单滑块上的垂向载荷;
床身
滑块 导轨
δz —滚珠沿垂向的变形量。 由赫兹接触理论可得,式(1)中的变形量 δz 即为 δ1 、δ2 之和
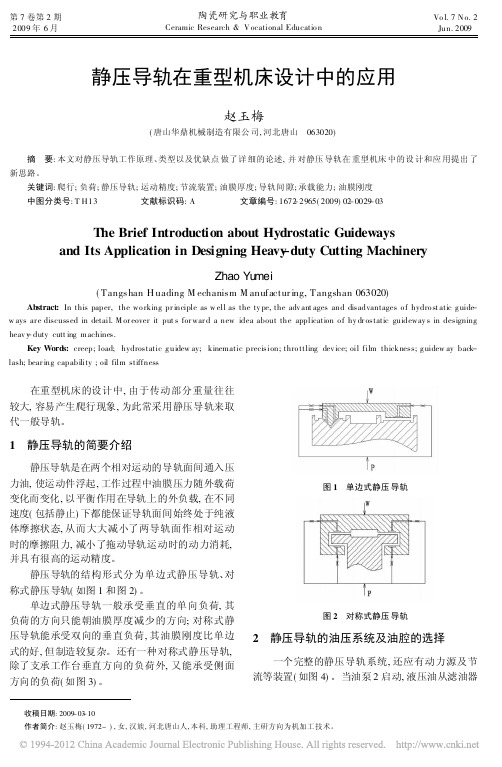
静压导轨在重型机床中的应用分析

静压导轨在重型机床中的应用分析46
摘要:介绍静压导轨设计的基本要求以及设计原则,通过静压导轨应用于重型机床垂直导轨的应用实例,评价其效果。 关键词:静压导轨;重型机床;精度;稳定性 中图分类号: TG519.1 文献标识码: A 文章编号:1671-5799(2015)17-0169-01 1 导轨的类型 导轨按其摩擦性质可分为滑动导轨和滚动导轨两大类。 其中滑动导轨按其摩擦状态又分为静压导轨、动压导轨和普 通滑动导轨。液体静压导轨在机床行业中得到了广泛的应用, 前景十分乐观。它是将具有一定压力的油液经过进油孔送入 导轨上开设的油腔中, 形成承载的压力, 将运动导轨微浮起, 使两导轨间形成极薄的油膜,且油膜厚度基本保持恒定不变 的一种纯液体摩擦的滑动导轨。 此导轨无摩损, 无静摩擦力, 无低速爬行现象,但设计、制造,使用比较复杂。 2 导轨设计的基本要求 (1)导向精度。导向精度是导轨副主要技术指标,它主要 取决于导轨本身的几何精度及导轨配合间隙。一般精度高的 导轨要求是 0.1 m /1000mm,所以,导向精度是指导轨自身 形状的准确性。 (2)精度保持性。精度保持性是指导轨在工 作过程中保持原有几何精度的能力,主要由耐磨性决定。有 些精密设备精度降低很快,甚至失效,耐磨是主要的因素。 导轨磨损就要进行大修,很不经济,所以,提高导轨耐磨性 是目前研究导向。 (3)运动精度。包括低速运动平稳、无爬 行、摆动、定位准确这几个方面。 (4)足够的刚度。刚度不 足不仅会降低导向精度还会加快导轨面的磨损,从而影响加 工或测量的精度。它主要与导轨的类型、尺寸及导轨材料有 关。 (5)结构工艺性好。导轨的结构应简单、便于制造、检 验和调整。 (6)具有良好的润滑和防护装置。 (7)热变形。 当环境温度变化时,导轨的变形要尽量小。 3 液体静压导轨的设计原则 3.1 误差补偿原则 (1)导轨间必须设置中间弹性环节,如流体膜等。 (2)导轨间应有足够的预紧力,以便补偿接触误差。 (3)导轨的制造误差应小于中间弹性体的变形量。 3.2 精度互不干涉原则 制造和使用时导轨的各项精度互不影响。 3.3 具有一定的承载能力和油膜刚度 在设计时,承载力必须达到机床导轨上导轨自重、工件 重量、切削力等外力总和。油膜刚度必须达到在负载变化时 油膜厚度变化量达到设计要求的限度。 3.4 导轨精度和油膜厚度 液体静压导轨应保持两个相对运动的导轨面处于纯液 体摩擦状态,同时应保证导轨具有良好的运动精度、高的油 膜刚度,较小的油泵功率消耗,因此对静压导轨面的几何精 度有一定的要求。要满足: ≦(1/2~1/3)h0 式中: (cm)—在移动件导轨面内的几何精度总误差。 h0(cm)—导轨的油膜厚度。 中小型机床 h0=0.015~0.030mm 大型机床 h0=0.030~0.060mm 3.5 油腔数及其布置 (1)一般沿导轨长度须设置多个油腔,为了使油膜均 匀,每条导轨面在其长度方向的油腔数目不得少于 2 个。 (2)移动导轨长度大于 2m 时,一般不超过 5~6 个, 若长度小于 2m 时,油腔数目 2~4 个。直线运动导轨,油腔开 在运动部件的导轨面上,圆周运动导轨,则开在固定部件上。 3.6 节流器的选择 一般有毛细管、小孔节流、滑阀节流及薄膜反馈节流 4 种可选择设计。 4 工程实例 当静压导轨应用于重型机床垂直导轨时,结构形式和供 油方式对导轨的承载能力和油膜刚度都产生影响。由于重型 机床垂直导轨所承受的载荷为正反方向水平载荷和偏载引 起的颠覆力矩,而且载荷随切削力变化和移动件位置变化而 变化,所以对油膜的承载能力和油膜刚度要求很高。因此垂 直导轨应用静压技术,就要选择能够承受正反方向的载荷, 油膜刚度高,承受偏载及颠覆力矩能力强的闭式静压导轨。 采用恒流供油式静压导轨避免了采用恒压供油式静压 导轨产生的诸如调整不便, 不易控制, 导轨稳定性差的问题。 恒流供油式静压导轨为“一腔一泵”的供油形式,只要有足 够的流量,就可以在油腔压力不均匀的条件下形成静压油膜, 油膜的刚性好,承载能力强,所以恒流式静压导轨适合在导 轨承载能力和油膜刚度要求都很高的重型机床垂直导轨副 上应用。 4.1 各项参数、指标的确定 4.1.1 油腔布置 每条导轨面在其长度方向的油腔数目一般 2~4 个.油腔 一般设计在导轨副中较短的导轨面上, 例如, 横梁升降导轨副 中油腔设计在横梁上。滑枕升降导轨副中油腔设计在溜板上。 4.1.2 导轨精度和油膜厚度 导轨油膜厚度不宜过大,以免造成移动件运动速度不稳 和爬行等现象,也不宜过小,以免造成导轨研伤和导轨加工 成本的上升。对于重型机床一般控制在 0.03~0.06mm。 对于导轨副中较长的导轨面,例如横梁升降导轨副中的 立柱导轨,滑枕升降导轨副中的滑枕导轨需要机加工保证, 导轨面精度需要控制在直线度误差 0.1mm/1000mm, 导轨间平 行度控制在 0.02mm/1000mm 以内。对于较短的导轨面,使用 注塑复印成型技术进行加工。 4.1.3 静压导轨的供油系统是实现静压的重要环节 所用到的液压元件主要有前置供油泵、溢流阀和给每个 油腔供油的定量泵。机床液压系统主要由机床静压供油系统 和机床液压控制系统两部分。静压系统所用的油液易受到外 界污染(粉尘、金属屑以及油液中析出的杂质) 。机床越大, 循环的油越多,问题越容易产生。所以油品要与控制系统的 分开, 单独过滤。 重型机床的静压系统对环境温度要求较高, 一般不得超过 50℃。所用的油液冷却装置,可采用室温通调 型油温控制机。 4.1.4 密封和回油系统 龙门镗铣床滑枕导轨可采用密封条,在结构允许的条件 下尽可能增加层数,并且要选择耐磨损耐腐蚀的材质,同时 配置相应的回油系统。 4.2 应用效果评价 (1)导轨寿命长,无机械磨损; (2)运动平稳,无低 速爬行现象; (3)调试方便,只需磨削,刮研导轨面达到性 能要求。 随着现代工业水平的不断提高,高精度产品越来越多, 静压导轨所需要的精度也越来越高,但静压导轨在实际运用 中还有很多不足的地方,有待今后不断完善与改进。 参考文献 [1]李炳健 .液体静压导轨在机床中的应用 [J] 2003 .9, 山西机械 [2] 刘胜军 . 数控外圆磨床砂轮架闭式静压导轨的设计 [J] 2011.4 [3]孔凌嘉,王晓力 .机械设计[M] 2006.2 北京理工大学 出版社 [4] 李嵩松 . 重型机床垂直导轨副应用恒流闭式静压导轨的 设计[J],2011.第 7 期 制造技术与机床
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 2 8卷 第 2期
VO 1 . 2 8 NO . 2
湖 北 工 业 大 学 学
报
2 0 1 3年 0 4月
Ap r . 2 O1 3
J o u r n a l o f Hu b e i Un i v e r s i t y o f Te c h n o l o g y
相对 于运 动部 件和 支 撑部 件 来 说 非 常 小 , 其 质 量 在 动力 学建 模时 亦可 忽略 . 鉴 于此 , 建 立静 压 导轨 可 动 结合 部 的弹簧 动力学 模 型 ( 图1 ) .
建模 和 识 别 方法 具 有 更 高 的 准确 性 . 黄 玉 美 等 众
多学 者经 过研究 , 将 机床 中 的各种 结合 面分 为三类 : 固定结 合 面 、 半 固定 结合 面 和可 动结 合 面. 目前 主要 研究 的都 是 固定结 合 面 , 可 动 结 合部 的研 究 主 要是 集 中在滚 动导 轨 上 . 静 压 导 轨 由于 其 优 越 的 性 能 在 机床 中广 泛应 用 , 但关 于其 动 力 学建 模 的研 究 鲜有
[ 文 章 编 号 ]1 0 0 3 —4 6 8 4 ( 2 0 1 3 ) 0 2 — 0 1 0 8 — 0 5
重 型数 控 机 床 静 压 导 轨 可 动结 合 部 动 力 学 建 模
徐 金 方 ,雷 声 ,毛 宽 民 ,李 江波 ,李 斌
( 1武 汉重 型 机 床 集 团 ,湖 北 武 汉 4 3 0 0 7 1 ;2华 中科 技 大 学机 械 科 学 与 工程 学 院 ,湖 北 武 汉 4 3 0 0 7 4 )
[ 摘 要]提 出 用 弹 簧 模 型 模 拟 静 压 导 轨 可 动 结 合 部 , 并通过理论分析计算 , 得出弹簧的刚度. 建 立 了某 工 作 台 有 限
元模型 , 用 弹簧 单 元 代 替 静 压 导 轨 结 合 部 进 行 有 限元 分 析 , 得到其固有频率及振型. 并通过模态实验 , 对 所 建 立 的模
整 体结 构 的动态 特 性 , 并 通 过模 态 分 析 实 验验 证 建
模 的可靠性 .
学 者 的研究 , 这 种方法 已被广 泛应 用 . 频 响 函数法 基
1 静压 导 轨可 动 结合 部 动 力学 建等效 为弹簧 阻尼 单元 , 分别识 别
的, 经 过 Ts a i 和 C h o u _ l 4 ] 、 R e n和 B e a r d s _ 5 等 一 批
簧 刚度 的具体 计算 方 法 . 本 文 提 出 了一 种 重 型 机 床
静 压导 轨可 动结 合部 弹簧 动 力 学模 型 , 由流体 力 学 理论分 析计 算 弹簧 的 刚度 值 , 进 行 有 限 元 分 析得 到
型 进 行 了验 证 . [ 关键 词]静 压 导 轨 ;刚度 ; 模 态 分 析
[ 中 图 分 类 号 ]TH1 1 3 . 1
[ 文献标识码] : A
结 合部 对重 型数控 机床 静压 导轨结 构 的动态 性
动 频率 之 间的关 系表 达 式 , 但 他 的研 究 没有 给 出弹
厂——面磊 —— ]
[二j夏 口
专 毒
幸 毒
图 1 静 压 导 轨 可 动结 合 部 动 力 学模 型
报道 . 卢 华 阳 和孙 首 群_ g 提 出 了运 用有 限元 法 进 行 油膜 刚度 及导 轨 承 载 能 力 的 分 析 与计 算 方 法 . 魏旭 豪[ 1 。 ] 根据 实 际工程 中 的液体静 压 支 承 系统 , 将 油 膜 力 简化 为弹簧 支 承 , 建立 了工 作转 台 的有 限元模 型 , 对工 作转 台的动 力 学 特 性 进 行 分 析. 并 通 过 数 值 拟
能影 响 很大 , 甚 至是整 体结 构 的薄 弱环 节 [ 1 ] . 在 机 床
动 力学 参数 建模 方 面 , 吉 村 尤 孝I 2 在 分 析 了构 成 结 合 部 的两个 构件 之 间运动 学特性 的基 础上 建立 了结 合 面 6自由度相 互独 立 的等效 弹簧 阻尼器 动力 学模 型; 频 响 函数法 最早是 Mi y a z a k i [ 3 在1 9 8 4年提 出来
流 体经过 微 小 间 隙 时存 在压 力 损 失 . 基 于 这 个 原理, 可 以在 两个 平行板 之 间建立 一定 的压 力分 布 ,
[ 收 稿 日期 ]2 0 1 3 —0 3 —2 8 [ 作 者 简 介 ]徐 金 方 ( 1 9 6 4 一) , 男, 江苏常州人 , 武 汉 重 型机 床 集 团正 高级 工 程 师 , 研 究 方 向为 数 控 重 型 机 床 设 计 与 研 究
模 型 参数 确 定
1 . 1 静压 导轨 可动 结合 部的 动力 学建模
根据 静 压 导轨 的工作 原 理 , 其 在 法 向具 有 较 大 支撑 刚度 , 以便 运动部 件 在运动 过程 保持 运动 平稳 ,
而切 向 刚度非 常小 , 甚至 可 以忽 略. 静 压 油 膜 的质 量
合, 得到 了液体 静 压 支 承工 作 转 台 的 弹簧 刚度 与 振
为 了能 更 真 实地 反 映 油 腔模 型 的动 力 学性 能 , 避免 单根 弹簧 在 承偏 载 时 失 稳 , 对 每个 油 腔 用 四根 单 向的 弹簧进 行模 拟.
1 . 2 动 力学 模型 参数 的确定