机器人在排水管道中的研究和应用
采用智能机器人进行建筑排水管道掩埋施工工法(2)

采用智能机器人进行建筑排水管道掩埋施工工法一、前言建筑排水管道的安装十分重要,不仅需要考虑施工的效率和质量,还需要保证施工过程中的安全。
传统的排水管道施工工法存在劳动强度大、周期长、质量难以保证等问题。
为了解决这些问题,采用智能机器人进行建筑排水管道掩埋施工工法应运而生。
本文将介绍该工法的特点、适应范围、工艺原理、施工工艺、劳动组织、机具设备、质量控制、安全措施、经济技术分析以及一些工程实例。
二、工法特点该工法的主要特点包括,使用智能机器人实施排水管道掩埋施工,减轻劳动强度,提高施工效率;自动化操作,降低人为因素的影响,提高施工质量;可实现持续作业,提高工地安全。
三、适应范围该工法适用于各类建筑排水管道的掩埋施工,包括住宅小区、工业厂房、商业综合体等。
四、工艺原理智能机器人排水管道掩埋施工工法的主要工艺原理是基于智能机器人的导航系统和操控系统。
通过激光导航系统,智能机器人能够精确定位,并根据实际工程要求进行施工。
机器人搭载的挖掘装置可以完成对地面的开挖,而运输装置则负责将排水管道运送至指定位置,最后通过覆土装置将管道掩埋。
五、施工工艺在施工过程中,智能机器人首先进行现场勘测,获取地形数据,然后根据设计要求进行路径规划。
接下来,机器人进行地面开挖,将开挖土料载入运输装置中,然后将排水管道运送至开挖区域,并进行连接固定。
最后,机器人使用覆土装置将管道掩埋,完成施工任务。
六、劳动组织采用智能机器人进行建筑排水管道掩埋施工工法可以大大减少人工劳动,降低施工人员数量和劳动强度。
一般情况下,需要配备操作维护机器人的技术人员和监督人员。
七、机具设备该工法所需要的机具设备包括智能机器人、导航系统、挖掘装置、运输装置和覆土装置。
智能机器人具有自主导航、挖掘、运输和覆土功能,导航系统可实时定位机器人的位置和姿态,挖掘装置可进行地面开挖,运输装置负责将排水管道运送至开挖区域,覆土装置可将排水管道掩埋。
八、质量控制为确保施工过程的质量,需要采取一系列的质量控制措施。
高空作业机器人在城市排水工程中的应用案例分析

高空作业机器人在城市排水工程中的应用案例分析近年来,随着城市化进程的不断加快,城市排水工程的建设与维护变得愈发重要。
为了提高工程效率和安全性,越来越多的城市开始引入高空作业机器人。
本文将通过分析几个应用案例,深入探讨高空作业机器人在城市排水工程中的应用与价值。
首先,高空作业机器人在城市排水工程中的一个重要应用领域是检修和维护城市下水管道。
传统的管道检修需要人工进入管井或爬升至高处进行检查与维修,这不仅存在一定的工作风险,而且操作复杂且耗时。
而利用高空作业机器人,可以避免人员的风险,并且可以准确快速地对管道进行检测与修复。
例如,深圳某城市排水工程项目中,一款名为“管道侠”的高空作业机器人被成功引入,通过搭载摄像头和机械臂,它可以穿梭于城市高层建筑之间,检测和修复排水管道。
这种机器人不仅能够提高工作效率,还具备监控功能,通过即时图像传输,工作人员可以实时监测管道的工作状态,及时处理异常情况,大大提高了排水工程的安全性和可靠性。
其次,高空作业机器人在城市排水工程中的另一个应用是清洁城市排水口。
城市排水口是保证城市排水顺畅的重要环节,而清洁城市排水口的工作却常常被人们所忽视。
使用高空作业机器人可以避免工作人员亲自进行清洁,既提高了工作效率,又降低了工作风险。
例如,杭州某地排水工程项目中,一款名为“高洁通”的高空作业机器人被成功引进,配备有高压水枪和清洁装置,可以自动对城市排水口进行清洁作业。
通过预设路线和程序,机器人可以准确地清理排水口中的垃圾、杂草和污泥,保持排水通畅,减少城市内涝的风险。
此外,高空作业机器人在城市排水工程中还可以用于紧急应急救援工作。
在城市排水工程中,突发事件常常会导致管道堵塞、排水系统失灵等问题,从而引发城市内涝。
高空作业机器人的引入可以为紧急救援提供有力支持。
例如,在北京某城市排水工程项目中,一款名为“救援使者”的高空作业机器人被成功使用。
该机器人配备有高清红外摄像头和传感器,可以通过空中监测城市排水系统的情况,及时发现问题并实时传输给工作人员。
疏通下水道机器人研究报告

疏通下水道机器人研究报告一、问题的提出我们学校食堂周围的下水道经常堵塞,特别是下雨天,食堂周围积水严重,给我们用餐带来不便。
尽管学校常请物业公司的工人来疏通,可堵塞现象还是不见好转,疏通过的下水道多则半个月,少则一星期又堵塞了。
为什么疏通过的下水道很快又堵塞了呐?我通过观察工人疏通下水道的过程发现,工人们疏通下水道的工具只是用一根长长的毛竹片,判断下水道是否已疏通的唯一方法是看窨井里的水是否能流通。
其实窨井里的水是能流通了,但堵塞部位的垃圾并没有彻底清除,只是疏通了一个小口子,有一点垃圾流过来就又堵塞了。
由于工人们疏通下水道时看不见、摸不着,往往疏通不彻底,所以容易再次堵塞。
我想要是有一种专门用于疏通下水道的机器就好了。
二、解决问题的思路设计专门用于疏通下水道的机器人,它主要由驱动部分、工作部分和操作部分组成,操作部分要有摄像头、显示器和控制器组成。
让工人们在疏通下水道时看得见、摸得着,这样就可以彻底疏通堵塞的下水道了。
三、解决方案我设计的专门用于疏通下水道的机器人,它主要由驱动部分、工作部分和操作部分组成(如图所示)。
驱动部分由马达、变速箱、轮子等驱动装置组成;工作部分有弹簧转子疏通器、冲水龙头和机械手组成。
弹簧转子疏通器安装在机器人的前部,是促使下水道堵塞部位松动的主要部件,驱动弹簧转子疏通器的马达要选用低速马达,并选用三级或四级变速箱(转速慢可对弹簧转子疏通器起到保护作用,延长使用寿命);操作部分有摄像头、显示器和控制器组成,操作人员根据显示的图象进行操作。
四、使用方法通过摄像头看清下水道内的实际情况,工人根据显示的图象进行操作。
机器人到达堵塞部位后,通过弹簧转子的顺转和倒转使堵塞部位松动(弹簧转子是主要疏通器),在冲水龙头的帮助下使垃圾流走,遇到大件垃圾无法冲走,则使用大件垃圾清除机械手把它拖出来(机器人退出下水道)。
机械手正在拖出大件垃圾。
211086679_新型排水管道清淤机器人的结构设计与分析
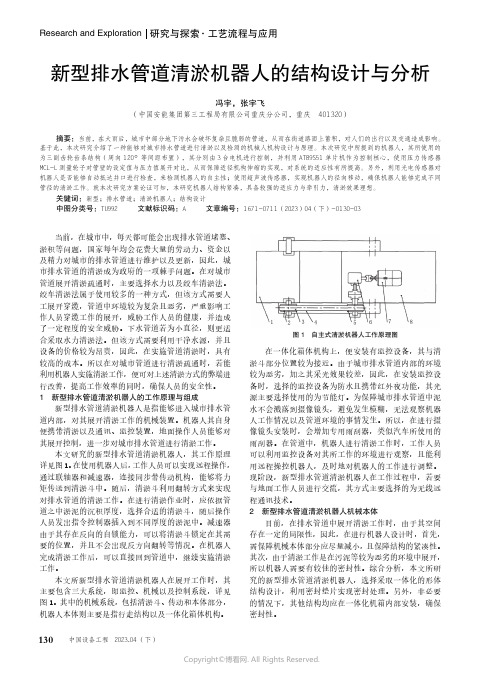
图1 自主式清淤机器人工作原理图
在一体化箱体机构上,便安装有监控设备,其与清淤斗部分位置较为接近。
由于城市排水管道内部的环境较为恶劣,加之其采光效果较差,因此,在安装监控设备时,选择的监控设备为防水且携带红外夜功能,其光源主要选择使用的为节能灯。
为保障城市排水管道中泥水不会溅落到摄像镜头,避免发生模糊,无法观察机器人工作情况以及管道环境的事情发生。
所以,在进行摄像镜头安装时,会增加专用雨刮器,类似汽车所使用的雨刮器。
在管道中,机器人进行清淤工作时,工作人员可以利用监控设备对其所工作的环境进行观察,且能利用远程操控机器人,及时地对机器人的工作进行调整。
现阶段,新型排水管道清淤机器人在工作过程中,若要与地面工作人员进行交流,其方式主要选择的为无线远
利用新型排水管道清淤机器人进行城市排水管道清淤,可以提高工作效率,降低城市排水管道清淤的总成本。
智能管道检测机器人技术的研究及其应用

智能管道检测机器人技术的研究及其应用第一章:引言随着工业化进程的不断推进和城市化进程的不断加速,各种管道的铺设已经成为了人们生活中一个不可或缺的部分。
无论是供水管道、排水管道、人工气体管道还是石油天然气管道等,都需要日常的检测和维护。
这些管道需要长期运转并保持正常运行状态,因此,如何保证管道运转的长期稳定性,减少事故的发生,成为了管道检测的重要课题。
近年来,随着智能技术的逐渐发展和机器人技术的广泛应用,智能管道检测机器人已成为管道检测和维护领域的一项重要技术。
智能管道检测机器人不仅可以减少检测人员的风险,减少检测的时间和费用,而且可以准确检测出管道内部的问题,提高管道维护和检测的效率。
本文将对智能管道检测机器人技术的研究及其应用做一个详细的介绍。
第二章:智能管道检测机器人技术的发展现状及趋势智能管道检测机器人技术是近年来逐渐发展起来的一项技术。
由于长期腐蚀、摩擦等因素的影响,管道内部存在不同程度的磨损和损坏,因此需要对管道进行定期的检测和维护。
目前智能管道检测机器人技术的发展呈现出以下主要趋势:一、发展精度更高的检测技术。
为了检测到更小的管道问题,需要智能管道检测机器人具备更高的检测精度。
现在,红外线检测、热像技术、超声波检测等技术逐渐被应用。
二、降低成本和提高工作效率。
如何在不影响管道的情况下,尽可能多地获取管道信息是增加工作效率和减少成本的关键。
三、发展更加智能的计算机控制。
智能管道检测机器人需要具备较高的智能度,以便应对管道结构复杂、环境变化等多种情况。
四、增强环境适应能力。
智能管道检测机器人需要在各种复杂的工作环境中可靠运行。
因此,在设计和应用中,需要考虑机器人在不同的环境下的工作状态。
第三章:智能管道检测机器人技术的主要组成部分智能管道检测机器人通常由以下几部分组成:一、机器人体-它是智能管道机器人的主体部分。
在其内部包含了一系列的传感器、指令控制管理以及资料处理等部分。
二、能量供应系统-智能管道检测机器人的发挥必须依赖于相应的能源供给。
机器人技术在城市供水与排水系统中的应用

机器人技术在城市供水与排水系统中的应用随着科技的不断发展,机器人技术在各行各业中的应用越来越广泛。
城市供水与排水系统是其中一个关键领域。
机器人技术在城市供水与排水系统中的应用具有巨大的潜力,可以提高效率、降低成本,并改善城市的生活质量。
本文将探讨机器人技术在城市供水与排水系统中的应用。
一、供水系统中的机器人技术供水系统是城市基础设施中至关重要的一部分,而机器人技术在供水系统中发挥着重要的作用。
首先,机器人可以用于供水管道的巡检和维护。
传统上,供水管道的巡检和维护需要人工进行,费时费力且效率低下。
而机器人可以通过携带传感器和摄像头,实时监测管道的状况并自动检测潜在的问题。
这不仅节省了人力成本,还能够及时发现并修复管道的漏洞和破损,确保供水系统的正常运行。
其次,机器人可以用于供水厂的自动化管理。
供水厂是城市供水系统的核心,其安全运行至关重要。
借助机器人技术,供水厂的运行可以更加智能高效。
机器人可以通过自主导航和传感器监测工艺设备的运行状况,实时反馈相关数据并进行故障诊断。
这使得供水厂的生产效率得到提升,同时减少了人为因素导致的问题发生。
二、排水系统中的机器人技术排水系统是城市环境卫生和公共卫生的重要组成部分,机器人技术在排水系统中的应用能够有效解决一系列问题。
首先,机器人可以用于污水处理站的自动化管理。
污水处理站的运行需要高度的精确性和稳定性,机器人的应用可以实现对处理过程的全面监控和控制。
通过机器人的智能化能力,污水处理站的运行效率和处理质量得到明显提升。
其次,机器人可以用于污水管道的清洁和疏通。
传统的污水管道清洁需要人工投入大量时间和精力,且效果不佳。
而机器人可以携带清洁设备,在管道内进行高效的清洁和疏通操作。
机器人利用其灵活的机械臂和高精度的控制系统,能够清楚地探测和清理管道中的杂质和堵塞物,提高管道的通水能力和排水效率。
三、机器人技术应用面临的挑战尽管机器人技术在城市供水与排水系统中的应用具有很多优势,但仍面临一些挑战。
分析污水管道检测机器人在污水管道管理中的重要性

分析污水管道检测机器人在污水管道管理中的紧要性污水管道检测机器人是一种专门设计用于对污水管道进行检测和维护的智能机器人。
它可以在不人工进入管道的情况下,通过高精度的传感器和先进的图像处置技术,实现对管道的全面检测和问题识别。
其工作原理重要包含以下几个方面:1、机器人进入管道:机器人通过特别的进入口进入污水管道。
进入口可以是管道的入口、检修口或特制的进入设备。
机器人通常具备充足的快捷性和适应性,能够适应不同尺寸和形状的管道。
2、传感器和摄像头:机器人配备了多种传感器和高判别率摄像头。
传感器可以检测管道内的各种参数,如温度、湿度、气体浓度和压力等。
摄像头可以实时拍摄管道内的图像和视频。
3、数据手记和处置:机器人通过传感器和摄像头手记到的数据,经过处置和分析。
利用图像处置和机器学习算法,可以实现对管道内的异常情况和问题的识别,如裂缝、堵塞、渗漏和腐蚀等。
4、实时监测和反馈:机器人可以实时监测管道内的情形,并将检测结果反馈给操作人员。
通过无线通信或数据传输,可以将数据和图像传输到外部设备进行进一步的分析和处置。
污水管道检测机器人在多个领域有广泛的应用,重要包含以下几个方面:1、管道维护和管理:机器人可以定期对管道进行全面的检测和评估,适时发觉和修复问题,延长管道的使用寿命和削减维护和修理本钱。
2、管道安全和环境保护:机器人可以检测管道内的泄漏、渗漏和污染等问题,适时实行措施防止环境污染和安全事故的发生。
3、城市基础设施管理:机器人在城市基础设施管理中起侧紧要作用。
它可以帮助城市管理部门了解管道的情形,优化维护计划和资源调配。
4、工业和建筑领域:机器人也可以应用于工业和建筑领域的管道检测。
例如,石油化工厂和建筑工地的管道维护和安全检查等。
污水管道检测机器人相比传统的人工检测方法,具有以下优势:1、安全性:机器人可以替换人工进入不安全和恶劣的管道环境,削减人身损害的风险。
2、高效性:机器人可以快速、精准地对管道进行检测,节省时间和人力本钱。
污水管免断流缺陷检测机器人及其工程应用
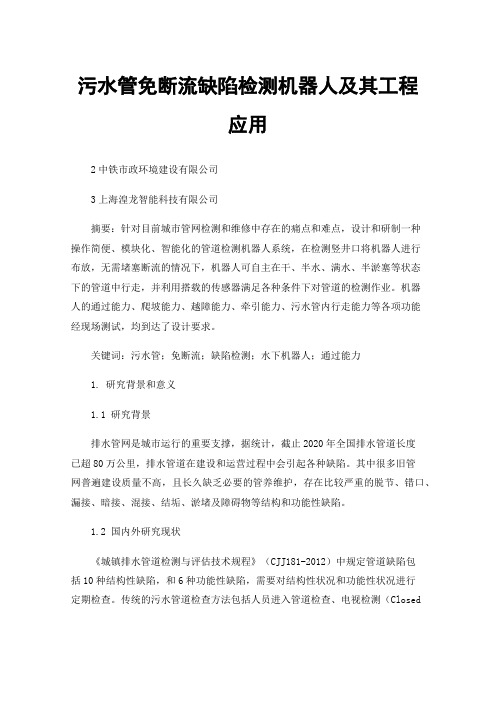
污水管免断流缺陷检测机器人及其工程应用2中铁市政环境建设有限公司3上海湟龙智能科技有限公司摘要:针对目前城市管网检测和维修中存在的痛点和难点,设计和研制一种操作简便、模块化、智能化的管道检测机器人系统,在检测竖井口将机器人进行布放,无需堵塞断流的情况下,机器人可自主在干、半水、满水、半淤塞等状态下的管道中行走,并利用搭载的传感器满足各种条件下对管道的检测作业。
机器人的通过能力、爬坡能力、越障能力、牵引能力、污水管内行走能力等各项功能经现场测试,均到达了设计要求。
关键词:污水管;免断流;缺陷检测;水下机器人;通过能力1. 研究背景和意义1.1 研究背景排水管网是城市运行的重要支撑,据统计,截止2020年全国排水管道长度已超80万公里,排水管道在建设和运营过程中会引起各种缺陷。
其中很多旧管网普遍建设质量不高,且长久缺乏必要的管养维护,存在比较严重的脱节、错口、漏接、暗接、混接、结垢、淤堵及障碍物等结构和功能性缺陷。
1.2 国内外研究现状《城镇排水管道检测与评估技术规程》(CJJ181-2012)中规定管道缺陷包括10种结构性缺陷,和6种功能性缺陷,需要对结构性状况和功能性状况进行定期检查。
传统的污水管道检查方法包括人员进入管道检查、电视检测(ClosedCircuit Television,CCTV)、声呐检测、潜望镜检测等方法[1-4]。
CCTV检测技术是目前用于管道状况检测有效的手段,许多城市引进了CCTV检测系统[5-7]。
图1常用的CCTV检测机器人国外对管道机器人的研究起步较早,自上世纪四五十年代就开展了对管道机器人的研究,比如美国P350 Flexitrax、加拿大的Versatrax系列管道机器人[8]、韩国的Collaboration-type[9-10]、德国的六关节管道机器人—MAKRO[11]、多足爬行管道机器人—MORITZ[12]、日本的KANTARO[13]等。
国内于上世纪90年代开始相关研究,包括沈阳自动化研究所和日本立命馆大学联合研制的螺旋式管道机器人[14]、哈尔滨工业大学研制的三轮腿式的管道机器人[15]、上海交通大学开发的管道蠕动机器人[16]等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 城市排水管道面临的问题
随着城市化进程的深入,城市地下管网的规模 也不断扩大,但大批的排水管道因为铺设时间久远, 现在已纷纷达到或接近使用年限,甚至很多管道没 有达到使用年限就因为老化而发生泄漏、破爆事故。 中国排水管道的现状令人堪忧,修建于 20 世纪 50 年代左右的排水管道已使用大约 60 年,它们在污水 长年累月的侵蚀以及其他外界因素的作用下,容易
的地方,并协助或取代人类完成工作。文章介绍了城市排水管道在检测及维修方面所面临的问题,阐明了机器
人在排水管道应用的必要性,评述了机器人在排水管道中的相关研究及各种检测和维修技术的性能特点,并对
排水管道机器人在检测、维修及标准化方面未来的发展做出展望。
关键词: 排水管道; 机器人; 检测; 维修
中图分类号: X22
排水管道检测缺陷可以分为两类,一类是结构 性缺陷,包括破裂、变形、错位、脱节、渗漏、腐蚀、胶 圈脱落、支管暗接、异物入侵等 9 种; 一类是功能性 缺陷,包括沉积、结垢、障碍物、树根、洼水、坝头和浮 渣等 7 种[4]。通常我们通过时钟表示法来表述管道 的缺陷[2]。了解这 些 缺 陷 有 助 于 我 们 对 排 水 系 统 检测有更深刻的认识,对排水管道机器人技术的要 求更加明确。 2. 3 排水管道检测技术分类
美国 Cues 机器人中的一款声纳剖面仪系统就 采用此种 技 术,用 于 满 管 或 半 满 管 水 的 管 道 检 测。 在吃水线以上区域一般使用 CCTV 进行检测; 对于 吃水线以下的内部管道状况检测使用 CUES 声纳剖 面仪,可检测管道淤泥量、管道变形、偏移等状况的 准确尺寸数据。在满管的管线或吸虹管内,声纳剖 面仪能够提供重要项目或缺陷区域的视觉剖面、剖 面对比图以及尺寸数据信息。在半满管的管线内, 声纳仪可与 CCTV 结合使用,提供吃水线以下和吃 水线以上的管道同步合成图像。
2006 年 1 月的北京京广桥事件中,东三环路京 广桥东南角辅路污水管线发生漏水事故,导致三环 路南向北方向部分主辅路塌陷,污水灌入地铁十号 线区间段,造成严重的经济损失,这是近年来引人注 目的一次污水管道漏水事故,引起了人们对市政管
·45·
第 37 卷第 9 期 2012 年 9 月
柏蔚等·机器人在排水管道中的研究和应用
第 37 卷第 9 期 2012 年 9 月
柏蔚等·机器人在排水管道中的研究和应用
Vol. 37 No. 9 Sep. 2012
通过不同功能模块的组装来实现对排水管道的检 测、清洗和维护[7]。
( 2) 管道声纳检测( Sonar Inspection) 法,它采用 声波反射技术对管道内的水下物体进行探测和定 位,能够提供准确的量化数据,从而检测和鉴定管道 的破损情况。主要利用管道成像声纳检测仪以水为 介质对管道内壁进行扫描,声纳系统包括发射探头、 连接电缆和 带 显 示 器 声 纳 处 理 器 三 个 部 分[4]。 这 种方法无需排干排水管道就可以对管道内部结构成 像,但只能检测液面以下的管道状况,不能检测管道 一般的结构性问题。
以排水管道过量地下水渗入为例,其危害包括: ( 1) 侵占管道的设计负荷,影响排水安全性; ( 2) 加 剧环境污染,影响污水处理厂按设计参数运行,降低 了污水处理厂的运行效率和处理效果; ( 3) 对于合 流制管道,过量地下水渗入导致雨天溢流事件频发, 溢流时间变长,加剧了对受纳水体的污染; ( 4) 增加 污水输送和处理成本; ( 5) 影响交通与管道设施的 使用等等[2]。
2 排水管道检测
基于城市排水管道可能出现问题,在西方发达 国家,对城市地下水排水管道的检测和普查平均 5 年进行一次。北上广等大城市认识到排水管道检测 的重要性,引进了内窥检测设备和技术,已经开始系 统的普查和检测[4]。 2. 1 排水管道检测作用
通过排水管道的检测可以查找排水系统隐藏或 被覆盖的检修井或去向不明管段; 查找和确定非法 排放污水的源头及接驳口; 可直接对排放污水与需 要处理污水的合流情况进行检测; 对管路淤积、排水 不畅等原因进行调查; 对管道的腐蚀、破损、接口错 位、淤积、污水泄漏污染等进行检测; 同时还能处理 新建排水系统的竣工验收和排水系统改造或疏通的 竣工验收等等[4]。 2. 2 排水管道检测缺陷分类
Vol. 37 No. 9 Sep. 2012
网的高度关注。 城市地下管道一般具有以下一些特点: ( 1) 可接
近性有限( Limited Accessibility) ; ( 2) 空间的局限性 ( Constrained Volumes) ; ( 3) 水的存在( Water) ; ( 4) 气 体( Gases) 的存在,一些排水管道里面有甲醛、H2 S,需 要格外注意; ( 5) 允许( Permission) 进管检查需要相关 部门的许可; ( 6) 地势( Terrain) ; ( 7) 缺乏光亮( Absence of illumination) ; ( 8) 与机器人的联通是通过系 绳或无线电( Communication with robot by tether or radio) 等[3]。这些问题的存在使得协助和代替人类进 行排水管道检测、维修的机器人成为发展的必然。下 面将从检测、维修技术入手,以服务于排水管道的正 常运行为目的来引入和介绍排水管道机器人,同时找 出现有状况的不足,对未来的发展提出更高的要求。
收稿日期: 2012 - 06 - 28 基金项目: 上海市重点科技攻关项目: 排水管道多功能检测设备关键
技术研究与集成( 10231201400) 作者简介: 柏蔚( 1989 - ) ,女,同济大学在读硕士研究生,研究方向:
城市排水管道改建。 通讯联系人: 李怀正
破损而引起污水泄漏[1],造成环境污染和社会经济 损失,危害不容小觑。
Abstract: As a kind of device that implements mission automatically,robot has gradually become the focus of research and application for decades both home and abroad. It can both accept human's commands and run programs edited in advance. It can also act according to principles made by artificial intelligent technology,reaches places where humans can't and assists or replaces people to accomplish works. This article introduces the problems urban sewers are facing in inspection and rehabilitation,and describes the necessity of robots' application in sewers. The related research of sewer robots and the properties of different technologies of inspection and rehabilitation in sewers were introduced. This paper also puts forward prospects for the future of sewer robots in inspection,rehabilitation and standardization.
但 CCTV 法对人员的 经 验 和 知 识 水 平 要 求 较 高,在摄像过程中工作人员需要现场记录观察结果, 解释从摄像器传送过来的图像,对图像进行一定的 判读。检测前还需要将排水管道中水位临时降低, 对于检测高水位的排水管网需要做一些辅助工作 ( 如抽水,封堵等) ,另外为清楚了解内壁情况,必要 时要预清洗内壁,通常使用高压水清淤。现在的商 用机器人多采用 CCTV 法与其他技术的综合运用,
第 37 卷第 9 期 2012 年 9 月
环境科学与管理 ENVIRONMENTAL SCIENCE AND MANAGEMENT
文章编号: 1674 - 6139( 2012) 09 - 0045 - 06
Vol. 37 No. 9 Sep. 2012
机器人在排水管道中的研究和应用
柏蔚1 ,李怀正1 ,陈卫兵2 ,汤霞1
根据现代检测技术的工作原理和采用的检测设 备,可分为管道外检测技术和管道内窥检测技术,这 ·46·
些技术能通过模块式结构安置于排水管道机器人上。 2. 3. 1 管道外检测技术
管道外检测技术包括: 一: 红外温度记录仪法 ( Infrared Thermography) ,其原理是利用排水管道渗 漏点与周边土壤形成的温度差,使用红外温度仪进 行测量和记录,测定温度变化并产生自动温度图像。 此方法可探测管壁表面和周围土壤层中的空隙和渗 漏 情 况,但 不 能 查 明 孔 隙 尺 寸[4]。 Wirahadiskusumah,Abraham 等人在 St. Louis 就使用红外温度记 录仪法来定位管道泄漏点和腐蚀出现的孔洞。然而 整个技术依赖于一种单一的传感器,而且在解释红 外图像上对技术人员的经验要求至关重要[5]。二: 透地雷达法( Ground Penetrating Method) ,此法用于 测量土壤层的孔隙深度和尺寸,混凝土管的层理和 饱和水渗出的范围,以及管道下的基础。但输出图 像复杂,需要经验丰富的人进行判断。三: 撞击回声 法常用于检测大口径的排空的混凝土管和砖砌管 道; 四: 表面波光谱分析法可以区分管壁和周围土壤 引起的问题,同时可以检测管壁的土壤情况[4]。 2. 3. 2 管道内窥检测技术及机器人应用