俯仰角计算工具
指北针的使用方法
指北针的使用方法本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March军用罗盘(指北针)使用方法—、用途六·五式罗盘仪是测定方位、距离、水平、坡度(俯仰角度)、高度、行军时间速度及测绘简单地图的一种简易测量器材,为便于夜间使用,在其各相应部位上涂有夜光粉。
二、结构简单介绍:仪器主要由罗盘、里程计两部分构成,如(附图1)。
罗盘部分有提环(1),度盘座(2),在度盘座上划有两种刻线,外圈为360度分划制,每刻线为1度。
内圈为6000(密位)分划制,圆周共刻300刻线,每刻线线值为20(密位)。
内有磁针(3),测角器(4),俯仰角度的分划单位为度,每刻线为2。
5度,可测量俯仰角度±60度。
里程计部分主要由里程分划表,速度时间表(8),测轮(9),齿轮,指针等组成。
里程分划有1:50000,1:100000两种比例尺刻度值。
1:100000比例尺每刻线相应代表1公里,1:50000每刻线相应代表0。
5公里,可与具有相应比例或成倍比例的地图配合使用。
速度时间表分划:外侧表盘上有13、15、17、19、21、23、25公里/小时,内侧表盘上有10、14、16、18、20、22、24、30公里/小时(以v代表),共十五种速度。
时间刻度中每一刻线相应代表五分钟(V25为10分钟)。
仪器侧面有测绘尺,两端为距离估定器。
估定器两尖端长毫米,照准与准星间长为123毫米,即为尖端长的10倍。
三、使用方法(一)测定方位:1.测定现地东南西北方向(1)打开罗盘仪!使方位指标“△”对准“0”;(2)转动罗盘仪,待磁针指北端对准“0”后,此时所指的方向就是北方,在方位玻璃上就可直接读出现地东、南、西、北方向。
2,标定把图万位标定地图方位就是利用罗盘使地图上的方位和现地方位一致。
(1)打开仪器,调整度盘座,使方位指标“△”对准“0”;(2)以测绘尺与地图上的真子午线相切;(3)转动地图,使磁针北端指向本地区的磁偏角之数值上,则地图上的方位和现地方位完全一致。
旋转矩阵和俯仰角-概述说明以及解释
旋转矩阵和俯仰角-概述说明以及解释1.引言1.1 概述概述:旋转矩阵和俯仰角是数学和物理学中的两个重要概念,它们在多个领域中都具有广泛的应用。
旋转矩阵用于描述物体在三维空间中的旋转运动,而俯仰角则是描述物体绕其水平轴旋转的角度。
旋转矩阵是一个方阵,其中的元素代表了物体相对于参考坐标系的旋转角度。
通过旋转矩阵,我们可以精确地描述和计算物体在三维空间中的旋转运动。
旋转矩阵的性质和应用也是我们在本文中要重点探讨的内容。
俯仰角是一种描述物体绕其水平轴旋转的角度。
它常用于天文学、航空航天领域,以及无人机和机器人等设备中。
俯仰角的计算方法和应用也是本文的重点内容之一。
本文旨在介绍和探讨旋转矩阵和俯仰角的概念、性质和应用。
我们将首先说明旋转矩阵的概念和性质,包括其表示方法、乘法规则和逆矩阵等。
然后,我们将介绍旋转矩阵在计算机图形学、机械运动学和人工智能等领域的应用。
接着,我们将详细讨论俯仰角的定义、计算方法以及在天文学和航空航天领域的作用和应用。
最后,我们将总结旋转矩阵和俯仰角的重要性,并探讨未来可能的研究方向。
通过本文的阐述,读者将会更加深入地理解旋转矩阵和俯仰角的概念和运用,对其在实际问题中的应用有更清晰的认识。
希望本文对读者在相关领域的学习和研究有所帮助。
1.2 文章结构文章结构部分的内容可以按照以下方式编写:文章结构本文主要分为四个部分进行阐述,分别为引言、正文、俯仰角和结论。
引言部分主要对文章的内容进行介绍和概述,旨在引起读者的兴趣。
其中,我们将简要概述旋转矩阵和俯仰角的概念和重要性,并介绍文章的结构和目的。
正文部分将详细介绍旋转矩阵的概念、性质和应用。
其中,我们将首先对旋转矩阵进行定义和解释,然后介绍旋转矩阵的一些重要性质和特点。
接着,我们将探讨旋转矩阵在各个领域的应用,例如图像处理、机器人运动控制等。
在俯仰角部分,我们将详细介绍俯仰角的定义、计算方法以及其在实际生活和工程领域中的作用和应用。
我们将通过示例和实际场景来说明俯仰角的重要性,以及它在飞行器、导航系统等领域的实际应用。
俯仰角与偏航角计算

俯仰角与偏航角计算俯仰角与偏航角是空间中常用的角度概念,它们在航空、导航、天文等领域中具有重要的应用价值。
本文将介绍俯仰角和偏航角的定义、计算方法以及其在实际应用中的意义。
一、俯仰角俯仰角是指物体或观察者与水平面之间的夹角。
在航空领域中,俯仰角常用于描述飞机、导弹等飞行器的姿态。
俯仰角的正方向为向上,负方向为向下。
计算俯仰角的方法可以采用三角函数,具体而言,可以通过物体的高度与水平距离之比来计算。
假设物体的高度为h,水平距离为d,则俯仰角θ的计算公式为θ = arctan(h/d)。
在实际应用中,俯仰角的计算可以通过各种传感器和测量仪器来完成。
例如,在飞机上,可以通过姿态传感器和气压计等仪器来测量飞机的俯仰角。
俯仰角的准确测量对于飞行器的平稳飞行和导航非常重要。
二、偏航角偏航角是指物体或观察者与北向之间的夹角。
在导航和天文领域中,偏航角常用于描述物体或观察者的方向。
偏航角的正方向为顺时针方向,负方向为逆时针方向。
计算偏航角的方法可以采用各种导航仪器和测量设备。
例如,在航海中,可以通过罗盘测量物体或观察者相对于北向的夹角来计算偏航角。
偏航角的准确测量对于导航和定位非常重要。
在航空领域中,偏航角也常用于描述飞机的姿态。
飞机的偏航角可以通过陀螺仪等仪器来测量。
偏航角的准确测量对于飞机的稳定飞行和导航至关重要。
三、俯仰角与偏航角的应用俯仰角和偏航角在航空、导航和天文等领域中具有广泛的应用。
在航空领域中,俯仰角和偏航角可以用于飞机的姿态控制和导航定位。
飞机的俯仰角和偏航角可以通过自动驾驶仪和惯性导航系统等设备来控制和测量。
在导航领域中,俯仰角和偏航角可以用于船舶和汽车等交通工具的导航和定位。
通过测量物体或观察者与水平面和北向的夹角,可以确定物体的方向和位置。
在天文学中,俯仰角和偏航角可以用于描述天体的位置和运动。
通过测量天体相对于观测者的俯仰角和偏航角,可以确定天体的坐标和运动轨迹。
俯仰角和偏航角是空间中常用的角度概念,它们在航空、导航、天文等领域中具有重要的应用价值。
光学经纬仪的使用方法

光学经纬仪的使用方法
光学经纬仪是一种测量地球表面上的点的经纬度和方位角的仪器。
它由三个主要部分组成:望远镜、经纬仪和三角架。
下面将介绍光学经纬仪的使用方法。
1. 安装三角架:将三角架放在平坦的地面上,并调整螺丝,使其水平。
然后将经纬仪固定在三角架上,并确保它的精度和稳定性。
2. 对准方向:调整望远镜的方向,使其对准被测点。
在对准过程中,需要使用地图等工具,确保望远镜的方向正确。
3. 记录角度:使用经纬仪记录望远镜的方位角、俯仰角和倾斜角。
这些角度可以用来计算被测点的经纬度。
4. 计算经纬度:使用公式计算被测点的经纬度。
经纬度的计算需要考虑地球的曲率和其他因素。
5. 校准仪器:在使用光学经纬仪之前,需要对其进行校准。
这可以通过观察已知经纬度的点,来调整仪器的精度和准确性。
使用光学经纬仪进行测量需要一定的技术和经验,同时需要注意天气和环境等因素的影响。
正确使用和保养仪器可以提高其精度和准确性,从而获得更好的测量结果。
方位角与仰俯角
测量设备
罗盘
罗盘是一种常用的测量方位角的 工具,通过磁针指示方向,可以
测量出目标物的方位角。
陀螺仪
陀螺仪可以测量出物体的仰俯角和 方位角,其原理是利用高速旋转的 陀螺在空间中的进动和自转来测量 角度。
全站仪
全站仪是一种集成了测距、测角、 数据处理等多种功能的测量仪器, 可以测量出目标物的三维坐标、仰 俯角和方位角等参数。
环境因素
环境因素如磁场干扰、温度变化等也会影响测量精度,需要在测量 时尽量减少这些因素的影响。
操作误差
操作人员的技能水平和经验也会影响测量精度,正确的操作方法和 熟练的操作技能可以提高测量精度。
05 2 3
定位目标
在军事领域,方位角和仰俯角是确定目标位置的 重要参数,有助于精确制导和射击。
导航
在复杂的地形和气象条件下,通过测量方位角和 仰俯角,可以确定军用车辆、飞机和舰艇的准确 位置,进行导航。
情报侦察
通过测量和分析不同地点的方位角和仰俯角,可 以获取敌方阵地、装备部署等信息,为军事决策 提供依据。
航空应用
飞行控制
01
在飞机导航和控制系统,方位角和仰俯角是重要的飞行参数,
用于确定飞行方向和高度,确保安全飞行。
方位角与仰俯角
目录
• 方位角 • 仰俯角 • 方位角与仰俯角的转换关系 • 方位角与仰俯角的测量工具 • 方位角与仰俯角的实际应用
01
方位角
定义
• 方位角:指从正北方向顺时针转到目标方向线的夹角,范围是 0°到360°。
计算方法
01
02
03
计算公式
方位角 = arctan((y坐标 值/x坐标值)×tan(北向角 度))。
在定位系统中的应用
指南针的使用说明

方法/步骤
7.测地图上任意两点间的里程:
不同比例尺的地图,其方里边长及实 地距离关系计算公式
1:地图:距离=(量得毫米数/4) X100(米)
1:地图:距离=(量得毫米数/2) X100 (米)
方法/步骤
3.求向掩蔽目标行进的行军方向:
展开指北针于地图上,使测绘尺经过 的图上本人立足点与行军目标,这时 方向指标即指应行进的方向。转动方 位框使方位玻璃上的(S、N)方向与 地图上的(S、N)方向一致,然后记 下方向指标所指方位角读数,面对方 向指标拿起指北针旋转身体,使磁针 N极与方位玻璃上的刻度线对准,此 时通过准星照门向前对准,
方法/步骤
打开指北针,标定好地图(测距时可不标定地图),在图上基准点处插一扎针,转动指北针,使 侧尺边切于目标点,即可判读出基准点至目标点的方位角。
方法/步骤
2.标定地图:
展开指北针,转动方位框,使方位框 上的刻度线字与方向指标对准(注意 磁偏角的修正),将指北针平放在地 图上,准星一端朝向地图北极,使坐 标梯尺长与地图磁子午线相切,转动 地图使磁针N极对准方位玻璃上的刻 度线,此时地图即已标定。
方法/步骤
如在长沙使用指北针时,查附表四长沙的磁偏角为2°41'(W),这就是说在长沙磁针所指北方 是正北方的西边偏2°41'的地方。 ②任何地方磁偏角求法。 在晴空夜晚,展开指北针,转动方位框,使方位玻璃上(N)字正对方向指标。用照门、准星、 平视镜及夜光标志正对北极星,不变指北针方向,将指北针平放,此时磁针北极所指读数就是所 在地磁偏角。
注意事项
FEKO使用指南
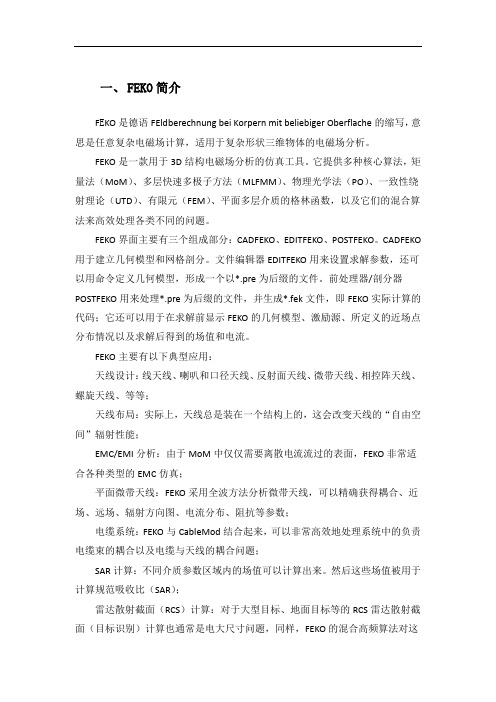
一、FEKO简介F E KO是德语FEldberechnung bei Korpern mit beliebiger Oberflache的缩写,意思是任意复杂电磁场计算,适用于复杂形状三维物体的电磁场分析。
FEKO是一款用于3D结构电磁场分析的仿真工具。
它提供多种核心算法,矩量法(MoM)、多层快速多极子方法(MLFMM)、物理光学法(PO)、一致性绕射理论(UTD)、有限元(FEM)、平面多层介质的格林函数,以及它们的混合算法来高效处理各类不同的问题。
FEKO界面主要有三个组成部分:CADFEKO、EDITFEKO、POSTFEKO。
CADFEKO 用于建立几何模型和网格剖分。
文件编辑器EDITFEKO用来设置求解参数,还可以用命令定义几何模型,形成一个以*.pre为后缀的文件。
前处理器/剖分器POSTFEKO用来处理*.pre为后缀的文件,并生成*.fek文件,即FEKO实际计算的代码;它还可以用于在求解前显示FEKO的几何模型、激励源、所定义的近场点分布情况以及求解后得到的场值和电流。
FEKO主要有以下典型应用:天线设计:线天线、喇叭和口径天线、反射面天线、微带天线、相控阵天线、螺旋天线、等等;天线布局:实际上,天线总是装在一个结构上的,这会改变天线的“自由空间”辐射性能;EMC/EMI分析:由于MoM中仅仅需要离散电流流过的表面,FEKO非常适合各种类型的EMC仿真;平面微带天线:FEKO采用全波方法分析微带天线,可以精确获得耦合、近场、远场、辐射方向图、电流分布、阻抗等参数;电缆系统:FEKO与CableMod结合起来,可以非常高效地处理系统中的负责电缆束的耦合以及电缆与天线的耦合问题;SAR计算:不同介质参数区域内的场值可以计算出来。
然后这些场值被用于计算规范吸收比(SAR);雷达散射截面(RCS)计算:对于大型目标、地面目标等的RCS雷达散射截面(目标识别)计算也通常是电大尺寸问题,同样,FEKO的混合高频算法对这类问题也有很好的计算效果。
俯仰角计算工具范文
俯仰角计算工具范文俯仰角是指物体相对于水平面的仰角或俯角。
在航空、地球物理、天文学等领域,俯仰角是一个重要的参数。
它被广泛用于测量、导航和定位系统中,帮助我们准确确定物体的位置和方向。
本文将介绍一种用于计算俯仰角的工具,并详细解释其原理和应用。
首先,我们需要明确俯仰角的定义。
俯仰角是指物体相对于参考水平面的角度。
当物体向上倾斜时,俯仰角为正值,表示物体相对于参考水平面的仰角;当物体向下倾斜时,俯仰角为负值,表示物体相对于参考水平面的俯角。
俯仰角的单位通常以度(°)来表示。
计算俯仰角的工具可以有多种,其中一种较为简单和常见的方法是使用三角函数。
我们可以利用正弦函数(sin)来计算俯仰角。
正弦函数是一个三角函数,表示一个角的对边与斜边的比值。
在使用正弦函数计算俯仰角时,我们需要知道物体的对边长度和斜边长度。
对边长度是垂直于水平面的距离,斜边长度是物体与水平面的距离。
通过将对边长度除以斜边长度,我们可以得到正弦值。
然后,我们可以使用反正弦函数(arcsin)来计算俯仰角,反正弦函数可以将正弦值转换回角度。
下面,我们将详细介绍使用三角函数计算俯仰角的步骤。
步骤1:确定对边长度和斜边长度。
对于测量物体的倾斜角度,我们需要准确测量对边长度和斜边长度。
对边长度可以通过使用测量工具(如尺子或测距仪)来获得,斜边长度可以通过使用水平仪或其他水平测量仪器来获得。
步骤2:计算正弦值。
使用对边长度除以斜边长度,得到正弦值。
例如,如果对边长度为6米,斜边长度为10米,则正弦值为6/10=0.6步骤3:计算俯仰角。
使用反正弦函数,将正弦值转换为角度。
例如,如果正弦值为0.6,则使用反正弦函数可以计算出角度为arcsin(0.6)=36.87°。
通过以上三个步骤,我们就可以计算出物体的俯仰角。
除了使用三角函数计算俯仰角,还可以使用其他方法。
例如,使用陀螺仪或加速度传感器来测量物体的倾斜角度。
这些方法通过测量物体的加速度或角速度来确定俯仰角。