三维成像v2.1
3D立体成像技术的应用和发展
3D立体成像技术的应用和发展1. 前言3D立体成像技术是一项在现代科技领域中越来越受到关注的技术。
从最初的“红蓝眼镜”到现在的“VR头戴显示器”,3D技术给人带来了跨维度的视觉体验。
本文将从“3D立体成像技术的定义和原理”、“3D立体成像技术的应用领域”和“3D立体成像技术的发展趋势和未来展望”这三个方面对3D立体成像技术进行深入探讨。
2. 3D立体成像技术的定义和原理3D立体成像技术是一种能够使人眼观察到物体的立体结构的技术。
它的原理是通过不同的成像方式,将平面图像转换成一个带有深度信息的立体图像,使得用户可以感受到像实物一样的3D视觉效果。
3. 3D立体成像技术的应用领域3.1 电影和游戏制作近年来,随着消费者对于视觉体验的需求不断增加,电影和游戏制作中的3D立体成像技术越来越受到青睐。
《阿凡达》和《异星觉醒》就是3D技术应用的成功案例。
同时,游戏制作公司也开始将3D技术作为开发游戏的工具,以提高游戏画面的逼真度。
3.2 医学和医疗诊断3D技术在医学以及医疗诊断方面的应用也越来越广泛。
例如,在医学图像处理中,可以将X光、CT、MRI等医学图像进行三维重建,以便医生更准确地进行诊断和手术操作。
3.3 建筑和设计3D技术在建筑和设计方面的应用也非常重要。
使用3D技术建模可以更加准确地呈现建筑物和室内设计方案。
同时,3D技术可以节省时间和成本,使得建筑和设计公司更加高效地完成工作。
4. 3D立体成像技术的发展趋势和未来展望4.1 通过不断改进算法,提高图像质量目前3D技术存在一些问题,比如图像质量不够好,易出现重影等现象。
为了提高用户体验,各家公司会通过不断改进算法等手段,提高图像质量,并解决常见的问题。
4.2 3D技术将融入更多的应用场景未来,3D技术将越来越多地融入到各种应用场景中。
比如,在智能家居领域,3D技术可以创建更加真实的虚拟场景,以便用户更好地体验智能设备。
同样,在在线教育和远程会议领域,3D 技术可以模拟真实的教室和会议场景,提高学习和工作效率。
三维立体显示技术
对观察者头部旳位置和观察角度有较严格旳限制 ;
不能显示或只能显示很有限旳运动视差图片 ;
水平辨别率损失,画面亮度较低 。
研究方向
更精确旳深度图;
区域移动补点研究 ;
运动视差图像旳研究 ;
新型构造和器件旳研究 。
返回
集成显示技术(Integral Imaging )
• 集成显示技术又称全景显示,于 1923年由 Lippmann发明。
体显示:G体像素
T体像素;
自动立体显示:到达上K旳可视区域;
MEMS器件在三维立体显示中旳应用;
全运动视差旳实现;
谢谢各位老师同学, 请提出宝贵意见。
被动发光旋转扫描体显示系统
Felix3D三维显示系统
可显示物体旳体像素数目10k。
被动发光旋转扫描体显示系统
Perspecta 3d显示屏
辨别率:768*768*192; 色彩格式:24bit RGB; 旋转屏转速:730rad; 体像素数:100M; 帧频:2409FPS; 接口数据率:4.68GB; 显示范围:10英寸; 可视角度:360°。
静态体三维显示技术
基于空间等离子体旳三维显示技术
静态体三维显示技术
DepthCube三维显示系统
体三维显示系统
最新进展
南加州大学研制旳三维显示系统
体三维显示系统
南加州大学研制旳三维显示系统旳 创新之处:
使用与水平成45度旳旋转镜来替代平面漫反射屏幕 。 研制了基于DLP旳帧频可高达5000fps旳超高速彩色投影机
体三维显示系统旳分类
目前,体三维显示系统从显示空间旳形成上划分可分为两
类:
•主动发光旋转扫描体 三维显示
•螺旋屏
3D成像方法汇总(原理解析)---双目视觉、激光三角、结构光、ToF、光场、全息
3D成像方法汇总(原理解析)---双目视觉、激光三角、结构光、ToF、光场、全息3D成像方法汇总介绍:这里要介绍的是真正的3D成像,得到物体三维的图形,是立体的图像。
而不是利用人眼视觉差异的特点,错误感知到的假三维信息。
原理上分类:主要常用有:1、双目立体视觉法(Stereo Vision)2、激光三角法(Laser triangulation)3、结构光3D成像(Structured light 3D imaging)4、飞行时间法ToF(Time of flight)5、光场成像法(Light field of imaging)6、全息投影技术(Front-projected holographic display)7、补充:戳穿假全息上面原理之间可能会有交叉。
而激光雷达不是3D成像原理上的一个分类,而是一种具体方法。
激光雷达的3D成像原理有:三角测距法、飞行时间T oF法等。
激光雷达按照实现方式分类有:机械式、混合固态、基于光学相控阵固态、基于MEMS式混合固态、基于FLASH式固态等。
1、双目立体视觉法:就和人的两个眼睛一样,各种两个摄像头的手机大都会用这种方法来获得深度信息,从而得到三维图像。
但深度受到两个摄像头之间距离的限制。
视差图:双目立体视觉融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像。
对于视差的理解可以自己体验一下:将手指头放在离眼睛不同距离的位置,并轮换睁、闭左右眼,可以发现手指在不同距离的位置,视觉差也不同,且距离越近,视差越大。
提到视差图,就有深度图,深度图像也叫距离影像,是指将从图像采集器到场景中各点的距离(深度)值作为像素值的图像。
深度图与点云的区别,点云:当一束激光照射到物体表面时,所反射的激光会携带方位、距离等信息。
若将激光束按照某种轨迹进行扫描,便会边扫描边记录到反射的激光点信息,由于扫描极为精细,则能够得到大量的激光点,因而就可形成激光点云。
单相机三维视觉成像技术研究进展

随着科技的不断进步和应用场景的不断扩大,三维视觉成像技术的研究也变得越来越重要。
单相机三维视觉成像技术是一种基于单一相机图像信息的立体视觉成像技术,具有成本低、安装简便、适用于不同尺度和场景、重建精度高等优点。
本文将从单相机三维视觉成像技术的概念、特点、优点等方面进行详细阐述,并对其研究进展进行概述。
一、概念单相机三维视觉成像技术,顾名思义,是通过单个摄像机获取物体的二维图像,并将其转化为三维视图。
在三维视觉成像的过程中,主要考虑到光影、颜色、形状等因素,通过计算实现对目标物体的三维重建。
这一技术已广泛应用于自动驾驶、机器人视觉导航、虚拟现实等领域。
二、特点1. 成本低廉:相比于其他三维视觉成像技术,单相机三维视觉成像技术成本相对较低,易于普及和推广。
2. 安装便捷:不需要进行多个相机的安装和调试,只需要一个摄像头即可,大大减少安装和维护成本。
3. 适用于不同尺度和场景:无论是室内、室外、近距离、远距离都可以适用,能够适应不同环境下的数据需求。
4. 重建精度高:功能强大的算法可以实现对目标物体的高精度重建,达到实时监控和数据识别的目的。
三、优点1. 可以实时获取数据:传统的三维成像技术需要几秒钟至几分钟不等的时间来实现数据获取,而单相机三维视觉成像技术可以实时获取目标物体的三维数据。
2. 可以实现远程控制:利用单相机三维视觉成像技术,可以通过网络进行远程控制,获取目标物体的数据和信息,实现实时监控和操作。
3. 可以实现多种功能:通过利用单相机三维视觉成像技术,可以实现多种功能,如人脸识别、虚拟现实、机器视觉导航等。
四、研究进展近年来,单相机三维视觉成像技术在自动驾驶、机器视觉、虚拟现实等领域得到了广泛的应用。
相应地,也有很多研究者对其进行了深入的研究和探索,旨在提高其重建精度和应用范围。
以下是其中的一些研究进展:1. 针对研究者对单相机3D 重建的需求和后期操作的需要,基于深度学习和场景几何基础进行研究,提出了基于单张RGB 图像的高精度3D 重建方法。
3d立体成像技术及应用

3d立体成像技术及应用3D立体成像技术是一种通过模拟或重建三维空间的技术,使观察者能够感知到深度和体积的技术。
它已经在许多领域得到应用,包括电影制作、游戏开发、医学图像处理等。
本文将详细介绍3D立体成像技术的原理和应用。
3D立体成像技术的原理主要是基于人眼视觉的工作原理。
人眼通过接收物体反射或发射的光线,并将它们投射到视网膜上。
这个图像由大脑解码,产生对物体位置、大小和形状的感知。
为了实现3D效果,我们需要在左右眼之间创建一种差异,从而模拟人眼接收到的不同角度的图像。
这种差异可以通过两种主要的技术实现:主动成像和被动成像。
主动成像技术通过在两个眼睛间交替显示不同图像的方式来实现深度感知。
这需要观众佩戴特制眼镜,这些眼镜通过液晶屏或快速切换滤光片来控制每只眼睛看到的图像。
例如,在电影院里观看3D电影时,观众戴上特制眼镜,一只眼睛看到左眼图像,另一只眼睛看到右眼图像,从而实现立体效果。
被动成像技术则不需要观众佩戴特殊眼镜。
这种技术利用特殊的投影屏幕或滤光片,将左眼和右眼的图像以不同的波长或极性进行分离。
观众只需用自己的双眼观看屏幕上的图像,立体效果就会呈现出来。
这种技术在电视、电脑显示器和游戏机中得到了广泛的应用。
除了电影和电视领域,3D立体成像技术在游戏开发领域也得到了广泛应用。
通过使用3D立体成像技术,游戏开发人员可以创建更加逼真和吸引人的游戏体验。
玩家可以感受到游戏中的深度和体积,增强了游戏的沉浸感和逼真度。
此外,医学领域也使用了3D立体成像技术。
例如,在医学图像处理中,如CT和MRI 扫描,医生可以通过使用3D成像技术来更清楚地看到病人体内的器官和组织,从而提供更准确的诊断和治疗。
总之,3D立体成像技术是一种可以模拟现实世界的三维空间的技术。
它的应用范围广泛,包括电影制作、游戏开发和医学图像处理等。
通过使用这种技术,人们能够更好地感知和理解物体的深度和体积,从而提供更逼真和沉浸的体验。
随着技术的不断发展,我们相信3D立体成像技术将在未来得到更广泛的应用。
人体三维动画制作软件

FreeWorld3D.v1.1.6 1CD(交互式的三维立体地形地貌生成和编辑软件, 可用于生成从简单的游戏场景到复杂户外环境)
ቤተ መጻሕፍቲ ባይዱ
GardenGraphics DynaSCAPE Professiona v3.02 1CD (专业的庭园、园林建筑设计规划软件)
Genemation.GenCrowd.3D.v2.0 1CD(3D面部合成人物建模工具)
Jetstream FX v1.14 for LightWave 1CD(用于Lightwave3D的渲染软件)
Rope Editor Plus v1.01 for LightWave(用于生成各种类型的绳索)
Trueart EasySplit v2.0 for LightWave(用鼠标或是徒手来切开多边形)
请按Clrt+F查找,输入软件关键字查询(不要输入版本号)
=============================================================
Side Effects Software产品:
Sidefx Houdini Master v8.2.31 1CD(创建高级视觉效果的终极工具)
Boris Red 3GL v3.04 incl Plugins Multilanguage 1CD(一套3D合成、字幕、和特效相结合的非编软件)
CAMbridge Animation Systems Animo v6.0 1CD (Animo是第一个集二维、三维动画于一体的软件包)
Avid Media Composer v2.7.5-ISO 1DVD(非线性编辑)
Avid.Metasync.v22.1-ISO 1CD(音视频后期制作)
全数字彩色多普勒超声诊断系统产品技术要求汕头超声8

2.2. 1安全指标2. 1. 1 电气安全符合GB 9706. 1-2007、GB 9706. 9-2008 的要求。
2. 1. 2声输出符合标准GB 9706. 9-2008的要求。
2. 1. 3电磁兼容性能符合YY 0505-2012及GB 9706. 9-2008中第36章的要求。
2. 2性能要求2.2. 1连续工作时间:>8h;2.2.2电源电压适应范围:90V〜264V;2. 2.3探头阵元数:N128;2. 2.4系统可探测角度:,160°;2. 2.5宽频带成像:宽频带,带宽系数N1,最高频率,12.0MHz;变频,支持5段以上变频;2. 2.6灰阶系数:N256;2. 2.7接收信号动态范围:N180dB;2. 2.8主机配套的每一种探头的性能要求见表2第2页共18页第3页共18页2. 2. 9声工作频率与表2标称频率的偏差应在± 15%范围之内;2. 2. 10表2的参数符合YY/T 0162. 1-2009医用超声设备档次系列中A档B型超声诊断设备的性能要求;2.2.11彩色血流成像模式性能要求2. 2. 11. 1基本功能要求本系统以彩色血流成像模式工作时,应能在二维图像上以颜色显示血流的方向、平均速度与偏差。
血流方向以红蓝颜色表示,以颜色的深浅表示速度大小。
2. 2. 11.2性能要求表3彩色血流成像性能要求第3页共18页2. 2.122.2. 12. 1基本功能要求本系统以频谱多普勒模式(显示方式为D或B/D)工作时,应能够在频谱上显示血流的方向、速度大小与速度分布。
2. 2.12.2频谱多普勒(PW)模式性能要求第4页共18页2. 3外观与结构要求2. 3.1外观应整齐、美观、表面平整光洁、色泽均匀、无伤痕、锋棱、毛刺;2. 3.2操作面板上的文字和标志应清晰、准确、持久;2. 3.3控制和调节机构应灵活、可靠,紧固件应无松动现象; 2.3.4主要电镀件应符合YY 0076-1992中2级外观的规定;2. 3.5塑料件应无起泡、开裂、变形以及灌注物溢出现象;2.3.6主要油漆件表面应平整光洁、色彩柔和、色泽均匀、花纹清晰一致;不允许有露底、气泡、剥落、开裂、发白、流挂;不得有明显的浮色、针孔、橘皮、擦伤、碰伤。
数字化3D成像及虚拟手术在口腔颌面外科临床教学中的应用
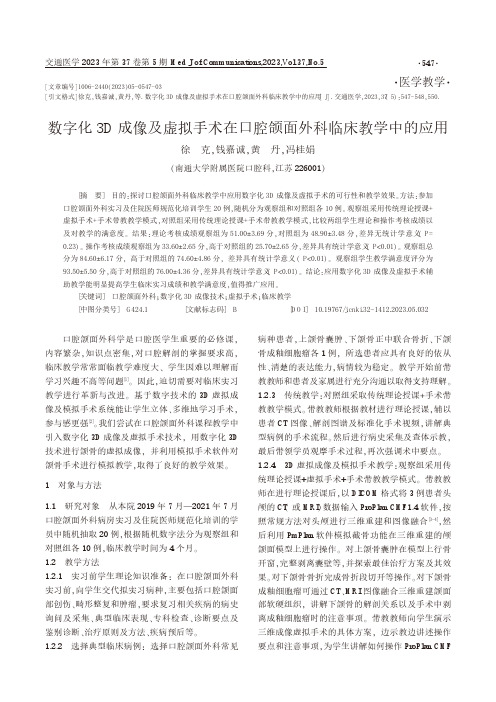
20233755[文章编号]1006-2440(2023)05-0547-03[引文格式]徐克,钱嘉诚,黄丹,等.数字化3D 成像及虚拟手术在口腔颌面外科临床教学中的应用[J ].交通医学,2023,37(5):547-548,550.口腔颌面外科学是口腔医学生重要的必修课,内容繁杂,知识点密集,对口腔解剖的掌握要求高,临床教学常常面临教学难度大、学生因难以理解而学习兴趣不高等问题[1]。
因此,迫切需要对临床实习教学进行革新与改进。
基于数字技术的3D 虚拟成像及模拟手术系统能让学生立体、多维地学习手术,参与感更强[2]。
我们尝试在口腔颌面外科课程教学中引入数字化3D 成像及虚拟手术技术,用数字化3D 技术进行颌骨的虚拟成像,并利用模拟手术软件对颌骨手术进行模拟教学,取得了良好的教学效果。
1对象与方法1.1研究对象从本院2019年7月—2021年7月口腔颌面外科病房实习及住院医师规范化培训的学员中随机抽取20例,根据随机数字法分为观察组和对照组各10例,临床教学时间为4个月。
1.2教学方法1.2.1实习前学生理论知识准备:在口腔颌面外科实习前,向学生交代拟实习病种,主要包括口腔颌面部创伤、畸形整复和肿瘤,要求复习相关疾病的病史询问及采集、典型临床表现、专科检查、诊断要点及鉴别诊断、治疗原则及方法、疾病预后等。
1.2.2选择典型临床病例:选择口腔颌面外科常见病种患者,上颌骨囊肿、下颌骨正中联合骨折、下颌骨成釉细胞瘤各1例,所选患者应具有良好的依从性、清楚的表达能力,病情较为稳定。
教学开始前带教教师和患者及家属进行充分沟通以取得支持理解。
1.2.3传统教学:对照组采取传统理论授课+手术带教教学模式。
带教教师根据教材进行理论授课,辅以患者CT 图像、解剖图谱及标准化手术视频,讲解典型病例的手术流程。
然后进行病史采集及查体示教,最后带领学员观摩手术过程,再次强调术中要点。
1.2.43D 虚拟成像及模拟手术教学:观察组采用传统理论授课+虚拟手术+手术带教教学模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
汇报内容
1. 项目背景 2. 研发内容 3. 预期效果 4. 计划与保障
7
研发内容 – 思路
能不能用普通CCD面阵实现三维成像?
我们提出一种全新体制的三维成像研发思路:
8
研发内容 – 问题
如何实现? 普通CCD不能实现纳秒级高速成像 普通LED难以实现纳秒级高速发光以 及远距离照明
0~20m 凝视成像 三维测距
640*320 60帧/s ±0.01m
小
< 2000元 三维测绘 动作捕捉
15
汇报内容
1. 项目背景 2. 研发内容 3. 预期效果 4. 计划与保障
17
计划与保障 – 团队介绍
我们是一个年轻富有朝气的研发团队 我们依托国内著名高校浙江大学光电信息工程系 我们团队拥有博士学位以上高级职称研发人员3名,2名博士后,6名博 士、硕士及研究生,还拥有一名在世界500强企业担任高管的管理人员 我们团队在光学领域从事多年研究和产品开发,具有丰富的产业化经验
产品、知识产权、销售及人才
13
预期效果 – 技术指标对比
与现有汽车壁障技术对比
技术类型 激光成像雷达 毫米波雷达
距离
成像特征
分辨率 成像速度 测距精度 销售价格
应用领域
0~10km 三维扫描成像
单帧成像
320*240 1帧/s ±0.1m 5万美元 军事 谷歌自动驾驶车
0~200m 测距 无视频
无
一种全新的重心法提 取距离信息,消除环 境和灰度影响
LED实现纳秒级高速 光脉冲
CCD实现高速、高灵 敏响应
CCD接收高速光脉冲 携带距离信息恢复
10
研发内容 – 效果
11
研究内容 – 技术特点
11
汇报内容
1. 项目背景 2. 研发内容 3. 预期效果 4. 计划与保障
13
预期效果 – 项目输出
设置标准点
1024*768 1帧/5s ±0.001m
大 35万元
三维模型测绘
0~10m/0~60cm
点阵、线阵照明
640*320 30帧/s ±0.01m
大 5000元 LEAP motion Kinect
0~20m 时域相位 三维测距
160*160 30帧/s ±0.3m
小
1.1万美元 三维测绘 军事目标识别
18
计划与保障 – 团队负责人介绍
符建 理论物理博士,浙江大学光电系副教授,主要研究方向:激光雷达、光纤
通信、集成光学、半导体光电子学与微纳光子学 产业化经历
2001年—2002年,参与160波DWDM光纤通信系统研发,华为公司预研部(核心成员) 2002年—2003年,主持研发国内第一个集成光波导AWG芯片和模块,昂纳公司(技术总监) 2011年—至今,创立杭州光锥科技有限公司从事LED照明技术研发生产,年销售达500万
LED实现纳秒 级高速光脉冲
CCD实现高速、 高灵敏响应
将CCD接收高速光 脉冲携带的距离信 息回恢复出来
9
研发内容 – 方案
一种基于延时积分的LED三维成像雷达系统:采用LED光源、
光带通滤波器、图像传感器、电子快门、数据处理器和显示终端。
采用补偿整形驱动技 术,采用低感抗LED 固晶邦定结构
重新构建CCD底层驱 动,实现多重曝光全 局电子快门
新型三维成像技术大规模应用
高速三维成像应用汽车防撞、自动驾驶 快速三维成像应用动作捕捉 高精度三维成像应用三维测绘 远距离三维成像应用目标识别
技术成果
开发四个系列应用新 产品,开辟三个方向 新应用。
• 专利6~10项 • 发明或PCT2项以上。
• 产品销售收入3000 万元以上。
培养新型三维成像设 计、开发、制造方面 的专业人才梯队。
汇报内容
1. 项目背景 2. 研发内容 3. 预期效果 4. 计划与保障
0
1
LED三维成像关键技术研究及产业化
团队负责人:符建
浙江大学光电信息工程系 (现代光学仪器国家重点实验室)
2013年7月14日
汇报内容
1. 项目背景 2. 研发内容 3. 预期效果 4. 计划与保障
3
项目背景 – 需求和重要性
专利名
1 201220366819.6 一种基于飞行光谱的三维成像雷达系统
2 201010166097.5 基于强关联量子成像原理的激光雷达
0~100m 三维凝视成像
兼红外夜视
640*320 60帧/s ±1m < 2500元 汽车防撞 自动驾驶
14
预期效果 – 技术指标对比
与现有近距离测绘技术对比
技术类型
距离
成像特征
分辨率 成像速度 测距精度 计算机运算量 销售价格
应用领域
结构光三维建模 结构光动作捕捉
深度相机
LED三维成像雷达
0~10m 点阵、线阵照明
主要研究项目
863项目(强度关联遥感成像技术研究)1项 国防军工前沿探索项目(双波长强关联量子激光成像雷达)1项 973项目(基于亚波长尺度光纤的复合导波结构与新器件)1项 国家自然科学基金3项
论著和专利
在Physical Review A,APL,JOSA,Optics Express,Journal of Physics B等杂志发表32多 篇文章(28篇SCI,3篇EI),申请获得国家专利25项(发明专利12项)
无
±0.3m 0.5万美元
军事 马自达汽车
倒车雷达
超声
视频
0~5m 测距 无视频
无 无 ±0.3m 800元
0~20m 无测距 二维视频
640*480 20帧/s
无 2000元
汽车倒车 汽车倒车
红外夜视
0~100m 无测距 二维视频
640*480 20帧/s
无 1.3万元
军事 宝马7系车
LED三维成像 雷达
主要经历
参见简历 浙江大学光电系 浙江工业大学物理系 浙江大学光电系 浙大计算机应用专业 浙江大学土木系 浙江大学光电系 浙江大学广东技术转移中心 浙江大学光电系 浙江大学光电系 浙江大学光电系 浙江工业大学物理系 浙江工业大学物理系
20
计划与保障 – 知识产权ຫໍສະໝຸດ 三维雷达专利LED专利
专利号
专利名
专利号
19
计划与保障 – 人员保障
主要项目参与人员
成员
符建 张秀达 张航 吕俊 王裔 符合 陆哲 严家麟 樊军 曹纯 胡逸 梁雪 马宇飞
团队作用
项目组织者 设计师 测试师 测试师 管理人员 管理人员 管理人员 管理人员 销售人员 工程师 工程师 工程师 工程师
学历/学位
博士 博士后 博士后 博士 硕士 硕士 本科 硕士 工程师 博士生 硕士生 硕士生 硕士生