棉花移栽机的设计
棉花移栽机设计论文
棉花移栽机的研究与设计杨武(山东技师学院)摘要:根据作物育苗移栽的农艺要求,在分析了国内外众多移栽机的基础上优化设计了适合棉花营养钵育苗移栽的的关键部件,并通过作业效果调查,分析研究了机械栽苗的一般规律,找出了影响栽苗效果的若干因素,确立了主要的工作部件的参数选择关键词:移栽机营养钵棉花1、引言我国是棉花种植大国,无论是种植面积还是单位面积产量,都位于先进植棉大国的前列。
但与先进植棉大国相比,我们的棉花生产方式落后、经营规模小、劳动生产率低、生产成本比较高。
面对形势,围绕节本增效,建立技术、资金、信息密集的现代化棉花生产体系已成为当务之急。
其中包括不失时机地推广适用的棉花生产机械化技术。
例如棉花移栽机的推广。
棉花移栽的优点主要体现在以下几个方面:(1)有利于培育壮苗和实现全苗密植,为以后棉花早发早熟奠定了基础。
(2)有利于增强棉花抗逆力,盐碱为害。
(3)降低了农民的劳动强度,提高了工作效率2、设计方案的选择通过调查研究,得知农民在移栽棉花的过程中遇到的最大问题不是移栽的速度,而是来回往返的挎苗所消耗的时间和精力,所以移栽机研究开发不应当单纯追求自动化和高速度。
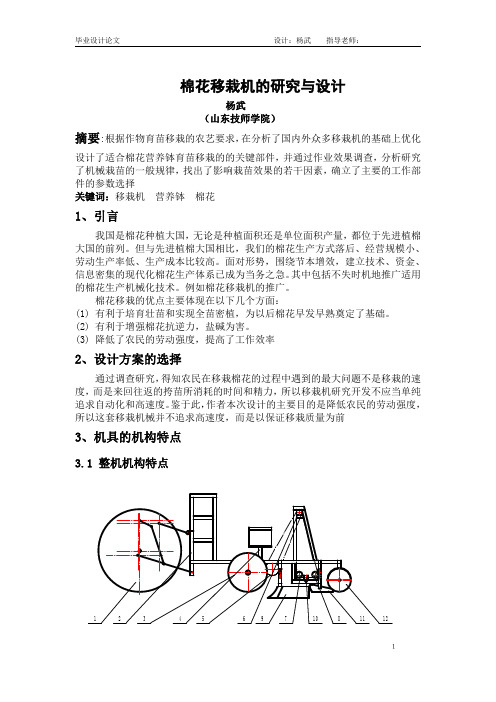
鉴于此,作者本次设计的主要目的是降低农民的劳动强度,所以这套移栽机械并不追求高速度,而是以保证移栽质量为前图1移栽机机构图(1)拖拉机后轮(2)钵苗架(3.地轮(4)座位(5)链轮43(6)链轮17(7)链轮17(8)链轮17(9)开沟器(10)吊杯(11)覆土板(12)镇压轮工作原理:工作时,由拖拉机后轮(1)驱动,带动后面的机构前行,同时,地轮(3)在驱动力的作用下转动,带动和地轮(3)同轴的链轮,然后此链轮带动链轮43(5)转动,同链轮43同轴的链轮15被迫转动,继而将力传给链轮17(6),于是放有棉花钵苗的吊杯(10)在链轮(6),链轮(7)和链轮(8)的共同作用下转动。
当到达图示位置时,吊杯在强制力的作用下打开,将钵苗放入由开沟器(9)开出的沟内,随后在覆土器(11)的作用下钵苗被固定,然后在镇压轮(12)的作用下,钵苗被牢牢压实,完成栽植工作。
棉花移栽机的研究与设计
任务书课题名称棉花移栽机的研究与设计Ⅰ、题目的目的和要求:本课题的主要目的是研制一种棉花移栽机械,使其能够大大降低农民的劳动强度,提高劳动生产效率和农民种植棉花的积极性,从而使棉花种植得到普及。
在设计过程中,一切从农民的角度的出发,力求设计简单实用,尽量降低制造成本,满足广大农民的需求。
并且在吸收和借鉴国内外移栽机优势的前提下,设计出一款合理的样机。
Ⅱ、设计技术要求与数据(或论文主要内容):要求学生设计一款能够和泰山12或泰山25拖拉机相配合的移栽机,该机具应结构简单,实用性强。
为提高此种移栽机的通用性,要求设计时多采用标准件,并且能够在一定范围内对移栽机的行距和株距进行微调。
棉花钵苗的基本形状为一ф40mm的圆柱体,高约为80mm,行距为60—100mm,株距为35mm左右Ⅲ、设计(论文)工作起始日期:自二○**年二月十四日起,至二○**年六月十五日止Ⅳ、进度计划与应完成的工作:第一周进行资料的收集,并初步完成总共大约5000字符外文资料的翻译工作;第二周进行相关机具的参观和调研,以及相关资料的整理;第三周至第五周提出相关的技术方案并进行论证和关键部件的模拟试验来验证方案,并确定方案第六周至第十四周进行结构设计并且完成3张0#图纸的绘制;第十五周至第十六周撰写约15000字符的毕业论文;第十七周毕业答辩Ⅴ、主要参考文献、资料:【1】李其昀,汪遵元双输送代式栽植器的试验研究《农业工程学报》1997 13(3) 124-127页【2】《我国棉花营养钵移栽机械现状与发展趋势》,夏俊芳·王树才·许绮川,中国农机化,2002年第1期,36~37【3】封俊,顾世康,曾爱军,宋卫唐,刘亚佳,胡鸿烈导苗管式移栽机的试验研究(1) 《农业工程学报》1998 14(1) 103-107页【4】封俊,顾世康,曾爱军,宋卫唐,刘亚佳,胡鸿烈导苗管式移栽机的试验研(2)《农业工程学报》1998 14(2)73-77页【5】封俊,顾世康,曾爱军,宋卫唐,刘亚佳,胡鸿烈导苗管式移栽机的试验研究(3)《农业工程学报》1998 14 (3)【6】封俊,顾世康,曾爱军,宋卫唐等夏玉米免耕覆盖移栽的试验研究《农业工程学报》2000 16(3)【7】孙学振,施培,张红,周治国棉花育苗移栽页地膜覆盖高产栽培技术研究进展《中国农学通报》 1999 (2)【8】北京市农业机械研究所悬挂4行玉米移栽机《农机情报资料》1974 (1)【9】宋卫唐,2ZDF型半自动导苗管式移栽机《农业机械》1999 11 29 【10】邱宣怀主编机械设计(第四版)高等教育出版社 2001【11】王兰美、刘衍聪主编现代工程制图高等教育出版1999【12】中国农业科学研究院编农业机械手册机械工业出版社 1998【13】R.L.Norton,Design of Mechinary, McGraw-Hill,New York,1992【14】B.Paul,in: Kinematics and Dynamics of Planar Machinery,Prentice-Hall,New, Jersey, 1981目录摘要 (1)1前言 (2)2移栽机械的国内外现状 (3)3 设计方案的选择 (4)3.1 钳夹式移栽机 (4)3.2 链夹式栽植机 (4)3.3 挠性圆盘移栽机 (4)3.4 吊篮式移栽机 (4)3.5 导苗管式移栽机 (5)3.6带式栽植机 (5)4 机具的机构特点 (6)4.1整机机构特点 (6)4.2主要技术参数 (6)4.3主要工作部件的结构特点及作用 (7)4.3.1 地轮 (7)4.3.2 开沟器 (7)4.3.3 镇压轮 (7)4.3.4 覆土器 (7)4.4设计棉花移栽机械的原理 (8)4.4.1 零速原理 (8)4.4.2 栽植机械的结构设计 (8)5 地轮轴的校核 (10)6 设计时间的安排 (13)7 结论和总结 (14)8 谢词 (14)参考文献 (15)摘要根据作物育苗移栽的农艺要求,在分析了国内外众多移栽机的基础上优化设计了适合棉花营养钵育苗移栽的的关键部件,并通过作业效果调查,分析研究了机械栽苗的一般规律,找出了影响栽苗效果的若干因素,确立了主要的工作部件的参数选择关键词:移栽机营养钵棉花AbstractAccording to the requirement for agronomy transplantation to grow seedlings ,we have found a good method to the ones that are suitable for the cotton nutrition earthen bowl and grow seedlings and transplant in optimization design on the foundation of analyzing numerous transplanting machines both at home and abroad ,and through the investigation of the result of the homework, we have analysed and researchd the universal law of the plant shoots in machinery and found some factors that affect the result of plant shoots,and have established the parameter of the main part of the machine.Key words : transplantation nutrition bowl cotton1、引言我国是棉花种植大国,无论是种植面积还是单位面积产量,都位于先进植棉大国的前列。
吊篮式移栽机毕业设计(CAD图纸)

吊篮式移栽机毕业设计(CAD图纸)————————————————————————————————作者:————————————————————————————————日期:Qq:1269408632目录摘要 (4)abstract (4)1.移栽机械的国内外现状 (5)1。
1移栽机类型及特点 (5)1。
2 移栽机工作部件及栽植原理 (5)1. 2。
1钳夹式移栽机 (5)1。
2。
2 挠性圆盘式移栽机 (5)1. 2. 3 吊篮式移栽机 (5)1. 2. 4 导苗管式移栽机 (5)1. 2。
5 鸭嘴式移栽机 (6)1。
3移栽技术的发展现状 (6)1.4取苗机构的研究进展 (6)1。
5 送苗机构的研究进展 (7)1. 6栽植机构的研究进展 (7)1.7我国移栽机发展存在的问题及发展方向 (7)2. 吊篮式移栽机旋转杯式喂苗机构特点 (8)2。
1旋转杯式喂苗机构特点 (8)2.2 主要工作部件的结构特点及作用 (8)2。
2.1 苗杯 (9)2.2.2 槽轮机构 (10)2。
2.3 传动机构 (11)3.轴的校核 (12)3.1Ⅰ轴的设计计算 (12)3。
1.1材料的选择及轴颈的确定 (12)3.1.2确定各轴段直径 (13)3。
1.3各轴段的长度 (13)3。
1。
4 轴承的校核 (14)3.1.5与联轴器的连接轴的键的设计与校核 (14)3。
2 Ⅱ轴的设计计算 (14)3。
2.1轴径的确定 (15)3。
2.2各轴段长度的确定 (15)3。
2。
3 轴承的校核 (16)3.2.4键的选择与校核 (16)3。
3 Ⅲ轴的设计 (17)3。
3.1轴径的确定 (17) (17)3.3.2各轴段直径的确定 (17)3.3。
3各轴段长度的确定 (18)3.3。
4轴承的校核 (18)3。
3.5 联轴器的选择 (19)4。
润滑与密封的设计 (19)4。
1润滑设计 (20)4.2 密封设计 (20)5. 机架设计与说明 (20)5.1箱体的设计 (20)5.2 箱盖顶部外表面轮廓的确定 (20)5.3齿轮1处的箱盖顶部外表面轮廓的确定 (20)5.4底座凸缘厚度 (21)5。
基于ADAMS的棉花钵苗移栽机构优化设计
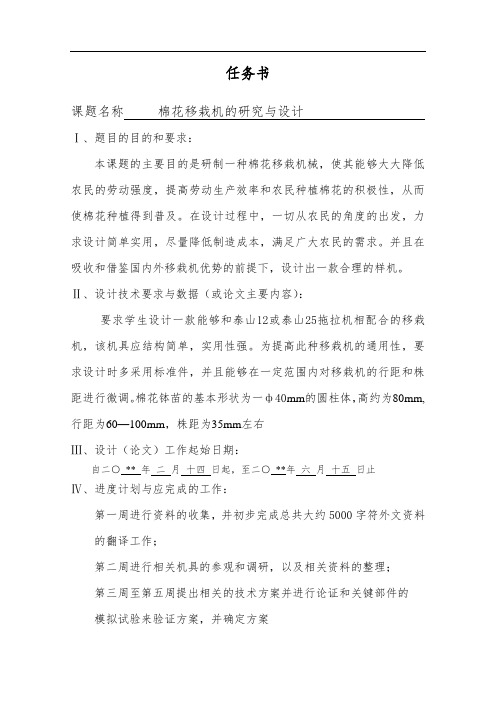
基于ADAMS的棉花钵苗移栽机构优化设计郭仓库(河南工业职业技术学院ꎬ河南南阳㊀473000)摘㊀要:为了提高棉花钵苗移栽机构的数字化设计效率和设计精度ꎬ将ADMAS软件和离散元技术引入到了机构的设计和仿真运动上ꎬ利用CAD软件对所设计的棉花钵苗移栽机构进行了三维实体建模ꎻ然后ꎬ通过CAD和ADAMS良好的数据接口将模型数据直接导入ADAMSꎬ根据实际设计要求添加相关约束ꎻ在此基础上ꎬ进行了运动仿真ꎬ研究了钵苗移栽机构的运动情况ꎮ通过仿真运动得了钵苗移栽机械的位移随时间变化结果ꎬ并绘制了可视化曲线ꎮ由曲线结果可以看出位移拐点及最大位移等信息ꎬ为机构的优化及强度校核等提供了数据参考ꎮ关键词:棉花钵苗ꎻ移栽机构ꎻ优化设计ꎻADAMS软件ꎻ运动仿真中图分类号:S223.9ꎻTP391.9㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2021)04-0117-040㊀引言苗钵育苗的出苗率较高ꎬ出苗的整齐度较好ꎬ钵苗移栽后生长较快ꎬ病虫害也较少ꎬ还可以进行工厂化生产ꎬ省时省力ꎬ是育苗技术未来的发展方向ꎮ目前ꎬ钵苗的移栽主要靠手工来完成ꎬ劳动强度大ꎬ作业效率低ꎮ为了提高移栽的作业效率ꎬ可以引入全自动移栽机器人ꎮ移栽机器人的机构设计非常重要ꎬ因为在不同作业时刻其产生的作业强度有所不同ꎬ在移栽机构的设计时需要考虑满足最大载荷时的强度ꎮ为了实现移栽机构的优化设计ꎬ将ADAMS软件和离散元技术引入到了机构的动态仿真设计上ꎬ对于提高移栽机构的设计效率和水平具有重要的意义ꎮ1㊀棉花钵苗移栽机工作原理穴盘主要用于蔬菜等作物的育苗工作ꎮ工厂化育苗技术由于具有诸多的优势ꎬ得到了广泛的应用ꎬ并从蔬菜育苗推广到各种作物的育苗上ꎮ育苗完成后ꎬ需要将钵苗进行移栽ꎬ棉花钵苗移栽机是棉花穴盘钵苗播种的最常用的机械ꎮ为了提高其设计水平ꎬ首先要研究钵苗移栽机械的工作过程ꎮ钵苗移栽机械1个动作的流程如图1所示ꎮ棉花钵苗的移栽过程是一个重复性的过程ꎮ首先通过旋转气缸将机构左旋转ꎬ然后升降气缸将机构收稿日期:2019-07-09基金项目:河南省科技厅科技攻关计划项目(172102310761)ꎻ河南省高等学校青年骨干教师培养计划项目(2016GGJS-238)作者简介:郭仓库(1985-)ꎬ男ꎬ河南商丘人ꎬ讲师ꎬ硕士ꎬ(E-mail)gck0377warehouse@163.comꎮ下行ꎮ取苗过程主要是通过伸缩气缸来完成的ꎬ伸长取苗针取苗后将机构缩回原位置ꎬ最后升降气缸使机构上行ꎬ旋转气缸ꎬ使机构右旋转ꎬ回到原始的位置ꎮ钵苗放置完成后ꎬ再重复上所述动作ꎬ直到完成所有的穴盘取苗工作ꎮ图1㊀棉花钵苗移栽1个动作流程Fig.1㊀Theactionflowofcottonbowlseedlingtransplantation2㊀基于CAD建模和离散元的仿真技术为了使棉花钵苗移植的动态仿真更加逼真ꎬ在进行移栽机机构仿真时需考虑钵苗和土壤的动力学特性ꎬ并采用离散元技术对土壤进行建模ꎬ建立刚性和柔性相结合更加贴近现实的三维模型ꎮ采用刚柔耦合的三维模型后ꎬ模型的动力学仿真输出特性和现实情况更加吻合ꎮ棉花钵苗㊁土壤和移植机械的建模和仿真过程如图2所示ꎮ在进行移栽机构动态仿真时ꎬ首先采用CAD建模ꎬ包括刚性模型和柔性模型的建模ꎬ得到刚性和柔性的耦合模型ꎻ然后ꎬ对模型设置合适的边界条件ꎬ输入参数后进行运动学仿真ꎻ仿真计算完成后ꎬ输出力学分析文件ꎬ对运动仿真过程进行分析ꎬ对于位移或者力的结果可以采用lod文件输出ꎬ并利用软件绘制曲线可视化结果ꎮ进行CAD建模时ꎬ大部分模型的建立较为简单ꎬ但土壤模型的建立较为麻烦ꎬ需要考虑土壤的力学模型ꎬ因此采用离散单元法ꎮ其中ꎬ常用的线性粘弹性模型分为法向接触力和切向接触力模型ꎮ法向模型表达式为Fn=knδn+cnvn(1)其中ꎬFn为法向作用力ꎬkn为法向刚度系数ꎬδn为法向叠合量ꎬcn为法向粘性阻尼系数ꎬvn为法向斥力ꎮ对于切向接触力ꎬ其主要加载时间有关ꎬ可以表示为Fs(t)=Fs(t-Δt)-ksvsΔt-csvs(2)其中ꎬFs为t时刻的切向力ꎬΔt为加载1次力的作用时间ꎬks为切向刚度系数ꎬcs为切向粘性阻尼系数ꎬvs为切向斥力ꎮ为了使仿真模拟更加贴合实际ꎬ在建模时还需要引入非线性粘弹性模型ꎬ即Fn=knδ3/2+cnvn(3)Fn=43E∗R∗1R=1R1+1R21E∗=(1-v21E1+1-v22E2)(4)其中ꎬR1㊁R2分别为接触时其位置的曲率半径ꎬE1㊁E2为弹性模量ꎬv1㊁v2为表示泊松比ꎮ法想作用力和切向作用力是不平衡的ꎬ在法向作用力大于切向作用力时ꎬ还需要引入塑性模型ꎮ采用Walton提出的双线性模型ꎬ即Fn=k1δ㊀㊀加载k2(δ-δ0)㊀卸载{(5)其中ꎬk1㊁k2分别为加载和卸载时的法向刚度系数ꎬδ㊁δ0分别为法向叠合量和残余法向叠合量ꎮ当触单元的距离DɤR1+R2时ꎬ法向接触力模型为Fn=knδn+cnvn(6)当两接触单元的距离R1+R2ɤDɤ(1+Cad)R1+R2时ꎬ法向接触力为Fn=kad[(1+Cad)(R1+R2)-D](7)其中ꎬCad表示接触力为拉力时的临界接触距离ꎬkad表示接触力为拉力时的临界刚度系数ꎮ根据离散元算法公式和原理ꎬ基于ADMAS和离散元的运动仿真过程主要分为6个步骤ꎬ如图3所示ꎮ图2㊀ADMAS建模和仿真流程Fig.2㊀ADMASmodelingandsimulationprocess图3㊀基于ADMAS和离散元的运动仿真Fig.3㊀ThemotionsimulationbasedonADMSanddiscreteelement1)建立仿真模拟边界条件ꎮ在建模前ꎬ首先要对边界条件进行分析ꎬ确定仿真模拟的材料参数㊁力学参数及约束等边界条件ꎮ在模拟之前ꎬ形成完备的参数数据库ꎬ在进行仿真模拟计算时可以直接调用ꎮ2)建立钵苗和移植机构模型ꎮ在建模时ꎬ移植机构选用刚性模型ꎬ钵苗选择柔性模型ꎮ最好建立刚性和柔性的耦合模型ꎬ使移植机械的运动仿真和实际情况更加符合ꎮ3)建立土壤接触力学模型ꎮ土壤模型的建立需要考虑干土和湿土两种模型ꎬ干土可以采用线性粘弹性模型ꎬ湿土选用土壤湿颗粒模型ꎮ4)建立土壤颗粒模型ꎮ采用离散单元法建立土壤的颗粒模型ꎬ并根据实验所得参数对土壤的颗粒进行物理性质和化学性质等一些参数的设置ꎮ5)输入仿真参数ꎮ仿真参数的输入主要包括一些动力和接触载荷等ꎬ输入之后便可以进行仿真计算ꎮ6)仿真分析ꎮ仿真计算完成后ꎬ输出位移和力等一些结果ꎬ并以文件的形式进行保存ꎮ文件中的数据还可以利用绘图软件ꎬ将数据以可视化的形式展示出来ꎬ使仿真结果更加直观形象ꎮ3㊀基于ADMAS的棉花钵苗移栽机运动仿真为了实现棉花钵苗移栽机的运动仿真ꎬ选用了ADMAS软件ꎬ结合离散元技术ꎬ通过移栽机械的仿真离散元分析得到仿真数据ꎬ对于结构的优化设计具有重要的意义ꎮ本次建立的移栽机模型和钵苗与土壤模型如图4所示ꎮ其中ꎬ钵苗和移栽机分别采用了柔性模型和刚性模型ꎬ并通过刚柔耦合设置使仿真和实际作业情况逼近ꎮ对于土壤的建模采用了离散元模型ꎬ在取苗过程中钵苗和土壤会对移栽机产生反作用力ꎬ使用刚柔耦合和离散元模型将会使仿真结果更加准确ꎮ在仿真之前ꎬ还要完成一些参数的设置ꎮ以关节处运动速度的设定为例ꎬ其设置参数界面如图5所示ꎮ图4㊀移栽机建模和动作仿真Fig.4㊀Themodelingandsimulationoftransplanter图5关节处运动角速度设定Fig.5㊀Angularvelocitysettingofjointmotion图5表示移栽机关节处的角速度设置ꎬ还有很多参数需要设置ꎬ如外部载荷和各种约束等ꎮ通过仿真计算ꎬ得到了移栽机构末端位移随时间变化曲线ꎬ如图6所示ꎮ图6移栽机构末端位移随时间变化曲线Fig.6㊀Thetime-dependentcurveofenddisplacementof㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀transplantingmechanism由图6可以看出ꎬ移栽机构末端位移具有较大的拐点ꎮ这是因为在取苗时会产生较大的反作用力ꎬ从而对机构产生较大的冲击ꎮ因此ꎬ在设计时需要以此处产生的最大应力应变为依据对机构进行校核ꎬ使机构的设计可以满足作业需求ꎬ避免作业过程中由于机械强度不够发生故障或造成疲劳破坏ꎬ保证作业的安全性ꎮ4㊀结论为了提高棉花钵苗移栽机构的设计效率ꎬ优化装置的机构ꎬ将ADMAS软件和离散元技术引入到了机构的设计过程中ꎬ通过对机构的运动仿真和分析ꎬ为移栽机的结构优化提供重要的数据参考ꎮ采用CAD软件建立了移栽机和钵苗的简易模型ꎬ并利用离散元技术建立了土壤的模型ꎬ最后将模型导入到ADMAS软件中实现了运动仿真ꎮ根据运动仿真可以得到位移的数据ꎬ根据位移拐点等可以确定最大的冲击载荷等数据ꎬ对于机构的优化设计具有重要的意义ꎮ参考文献:[1]㊀石明全.基于ADAMS的多接触问题研究[J].计算机工程与应用ꎬ2004ꎬ40(29):220-222.[2]㊀魏勇亮ꎬ金圭.ADAMS仿真时发生接触穿透的原因及对策[J].机械工程师ꎬ2005(9):53-54.[3]㊀徐中华ꎬ王建华.有限元法分析土壤切削问题的研究进展[J].农业机械学报ꎬ2005ꎬ36(1):134-137. [4]㊀刘国敏ꎬ邹猛ꎬ李建桥.蚯蚓体表与土壤接触界面动态行为仿真[J].吉林大学学报院(工学版)ꎬ2010ꎬ40(6):1609-1613.[5]㊀崔燚ꎬ李雯ꎬ袁王浚.梯形齿车轮月面牵引性能的离散元分析[J].北京航空航天大学ꎬ2010ꎬ36(3):253-256.2021年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期[6]㊀张锐ꎬ李建桥ꎬ李因武.离散单元法在土壤机械特性动态仿真中的应用进展[J].农业工程学报ꎬ2003ꎬ19(1):16-19. [7]㊀罗建国ꎬ何茂艳ꎬ陆震ꎬ等.基于UG的串并联机器人AD ̄AMS运动学仿真[J].机械设计ꎬ2007ꎬ24(4):5-8. [8]㊀熊震宇ꎬ陈焕明ꎬ葛杨.基于ADAMS的弧焊机器人运动仿真[J].计算机工程与应用ꎬ2005ꎬ41(11):166-167. [9]㊀李仕华ꎬ黄真.一种特殊的3-UPU并联角台机构的运动分析[J].机械设计ꎬ2005ꎬ22(7):16-19.[10]㊀沈红芳ꎬ宋又廉.基于ADAMS的弧焊机器人动力学仿真[J].机械设计与研究ꎬ2005ꎬ21(6):50-52.[11]㊀殷时蓉ꎬ贾永清ꎬ尹信贤.基于ADAMS的高空作业车举升臂动力学研究[J].重庆交通大学学报(自然科学版)ꎬ2011ꎬ30(5):1031-1034.[12]㊀朱华炳ꎬ张娟ꎬ宋孝炳.基于ADAMS的工业机器人运动学分析和仿真[J].机械设计与制造ꎬ2013(5):204-206. [13]㊀王南ꎬ王晶ꎬ平恩顺.基于ADAMS/Car的双横臂悬架的运动学建模与仿真[J].河北工程大学学报(自然科学版)ꎬ2010ꎬ27(4):55-58.[14]㊀宋传学ꎬ蔡章林.基于ADAMS/CAR的双横臂独立悬架建模与仿真[J].吉林大学学报(工学版)ꎬ2004ꎬ34(4):554-558.[15]㊀于海峰ꎬ于学兵.基于ADAMS的双横臂独立悬架优化仿真分析[J].机械设计与制造ꎬ2007(10):56-58.[16]㊀薛军震ꎬ赵永亮ꎬ李雷霞ꎬ等.水稻机械化种植模式[J].农业工程ꎬ2016ꎬ6(5):139-141.[17]㊀毛鹏军ꎬ李晶ꎬ张松鸽.七杆式移栽机栽植机构运动学分析 基于MATLAB[J].农机化研究ꎬ2013ꎬ35(12):59-62.[18]㊀高连兴ꎬ张龙步.水稻钵盘育苗移植技术研究进展[J].中国农机化ꎬ1999(4):17-18.[19]㊀王瑞丽ꎬ刘颖.水稻钵苗有序移栽的可行性研究[J].沈阳农业大学学报ꎬ2000ꎬ31(2):212-213.[20]㊀于晓旭ꎬ赵匀ꎬ陈宝成.移栽机械发展现状与展望[J].农业机械学报ꎬ2014ꎬ45(8):44-53.[21]㊀周海燕ꎬ杨炳南ꎬ颜华.旱作移栽机械产业发展现状及展望[J].农业工程ꎬ2015ꎬ5(1):12-13.[22]㊀李华ꎬ曹卫彬ꎬ李树峰.2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制[J].农业工程学报ꎬ2017ꎬ33(15):23-33.[23]㊀李旭英ꎬ王玉伟ꎬ鲁国成.吊杯式栽植器的优化设计及试验[J].农业工程学报ꎬ2015ꎬ31(14):58-64.[24]㊀石铁.全自动玉米秧苗移栽机的研制与试验[J].农业工程学报ꎬ2015ꎬ31(3):23-30.[25]㊀童俊华ꎬ蒋焕煜ꎬ蒋卓华.钵苗自动移栽机器人抓取指针夹持苗坨参数优化试验[J].农业工程学报ꎬ2014ꎬ30(16):8-16.OptimumDesignofCottonPotSeedlingTransplantingMechanismBasedonADAMSGuoCangku(HenanPolytechnicInstituteꎬNanyang473000ꎬChina)Abstract:Inordertoimprovetheefficiencyandprecisionofdigitaldesignofcottonpotseedlingtransplantingmecha ̄nismꎬADMASsoftwareanddiscreteelementtechnologyareintroducedintothedesignandSimulationofthemechanism.Thethree-dimensionalsolidmodelofthedesignedcottonpotseedlingtransplantingmechanismisbuiltbyusingCADsoftwareꎬandthenthedatainterfacebetweenCADandADAMSisusedtomakethemodel.ThemodeldataaredirectlyimportedintoADAMSꎬandtherelevantconstraintsareaddedaccordingtotheactualdesignrequirements.Aboveitꎬthemotionsimulationiscarriedouttostudythemovementofpotseedlingtransplantingmechanism.Thedisplacementofpot ̄tedseedlingtransplantingmachinechangeswithtimethroughsimulationmovementꎬandthevisualcurveisdrawn.Fromthecurveresultsꎬtheinflectionpointofdisplacementandthemaximumdisplacementꎬwhichprovidesdatareferencefortheoptimizationofmechanismandstrengthchecking.Keywords:cottonpotseedlingꎻtransplantingmechanismꎻoptimizationdesignꎻADAMSsoftwareꎻmotionsimulation2021年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期。
棉花裸苗移栽机送苗机构设计与仿真

棉花裸苗移栽机送苗机构设计与仿真首先,我们需要确定棉花裸苗移栽机的基本构造。
移栽机主要包括苗床分条装置、苗床压实装置、苗床运输装置、苗床开沟装置、苗床分饱装置、苗床取苗装置等。
1.苗床分条装置:用于将苗床中的裸苗条分离,确保各个裸苗条之间的间距适当。
2.苗床压实装置:用于将裸苗条与土壤紧密结合,确保移栽后苗株能够良好生长。
3.苗床运输装置:用于将苗床从苗床区域送至移栽区域。
4.苗床开沟装置:用于在移栽区域开设适当大小的沟槽,以便后续放置裸苗条。
5.苗床分饱装置:用于将裸苗条分装到各个开沟处,并确保裸根不受损。
6.苗床取苗装置:用于将裸苗条从苗床中取出并放置到移栽区域的开沟处。
设计完成后,我们使用SolidWorks等CAD软件对移栽机进行三维建模,并进行运动学仿真,以验证设计的合理性和可行性。
仿真测试主要包括以下几个方面:1.运输装置的稳定性:测试在不同地形和斜坡上移动时,移栽机的稳定性和平衡性是否能够得到保证。
2.苗床分条装置的效果:测试苗床分条装置的分条效果,验证各个裸苗条之间的间距是否符合需求。
3.苗床压实装置的效果:测试苗床压实装置的压实效果,确保裸苗条与土壤紧密结合。
4.分饱装置的效果:测试分饱装置的装置效果,确保裸苗条分装到不同开沟处时能够保持裸根的完整。
5.操作便捷性:测试移栽机的操作便捷性,包括操控灵活度、维护保养方便性等。
通过仿真测试,我们可以进一步优化移栽机的设计,确保其能够高效、稳定地完成裸苗的移栽工作。
总结起来,设计一个棉花裸苗移栽机需要考虑苗床分条、压实、运输、开沟、分饱和取苗等多个装置,通过CAD软件进行三维建模,然后进行运动学仿真测试。
这样能够验证设计的合理性和可行性,优化移栽机的设计,从而提高移栽效率和质量。
棉花秧苗移栽机的结构设计

棉花秧苗移栽机的结构设计
棉花秧苗移栽机是一种用于农业种植的机械设备,其结构设计
通常包括以下几个方面:
1. 机架结构,棉花秧苗移栽机的机架结构通常由钢材或铝合金
制成,具有足够的强度和稳定性,以支撑整个设备的运行和作业。
机架结构的设计需要考虑到设备的重量和稳定性,以及操作过程中
的振动和冲击。
2. 输苗装置,棉花秧苗移栽机通常配备有输苗装置,用于从苗
床中取出棉花秧苗并移栽到指定的地块上。
输苗装置的设计需要考
虑到对苗苗的轻柔处理,以避免损坏苗苗,同时也需要考虑到移栽
的准确性和效率。
3. 移栽装置,移栽装置是棉花秧苗移栽机的关键部件,通常采
用机械手臂或其他机械装置,用于将棉花秧苗从输苗装置中取出并
精准地移栽到土壤中。
移栽装置的设计需要考虑到对苗苗的轻柔处理,以及移栽的深度和角度等参数。
4. 动力系统,棉花秧苗移栽机通常由柴油发动机或电动机驱动,
动力系统的设计需要考虑到对移栽机各个部件的动力传递和控制,以及对整个设备的动力输出和能耗的合理设计。
5. 控制系统,棉花秧苗移栽机通常配备有电气控制系统或液压控制系统,用于控制移栽机的运行和作业。
控制系统的设计需要考虑到对移栽机各个部件的精准控制,以及对作业过程中的安全和稳定性的保障。
综上所述,棉花秧苗移栽机的结构设计需要考虑到机架结构、输苗装置、移栽装置、动力系统和控制系统等多个方面,以确保设备具有良好的稳定性、精准性和高效性。
吊篮式棉花移栽机分钵落苗装置设计与仿真分析(1)
— 110 —
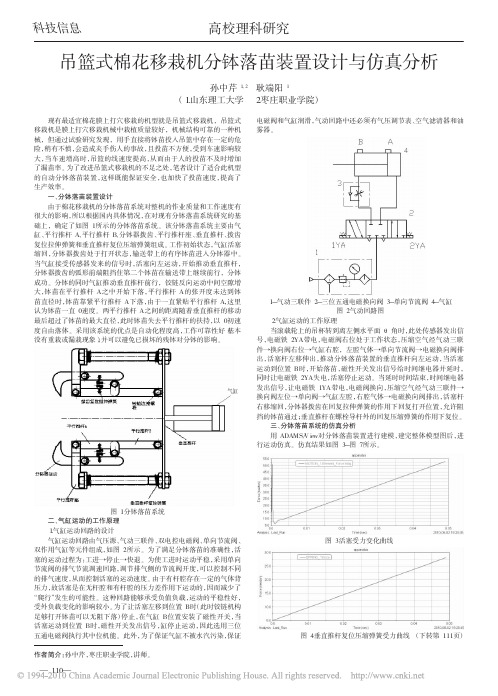
图 3 活塞受力变化曲线 图 4 垂直推杆复位压缩弹簧受力曲线 (下转第 111 页)课程的教学改革与研究
淮阴工学院 于长辉
[摘 要]《面向对象程序设计》是一门专业基础课程,具有完善的系统知识结构和语法规则,与理论密切配合的实践操作等特点。因 此在教学过程中应该注重模块化教学思路和模块化教学方法,注重挖掘模块感性化知识,从学生实际情况出发设计实验内容与要 求,切实培养学生融会贯通应用知识进行创新的能力。 [关键词]面向对象程序设计 模块化教学 知识创新
— 111 —
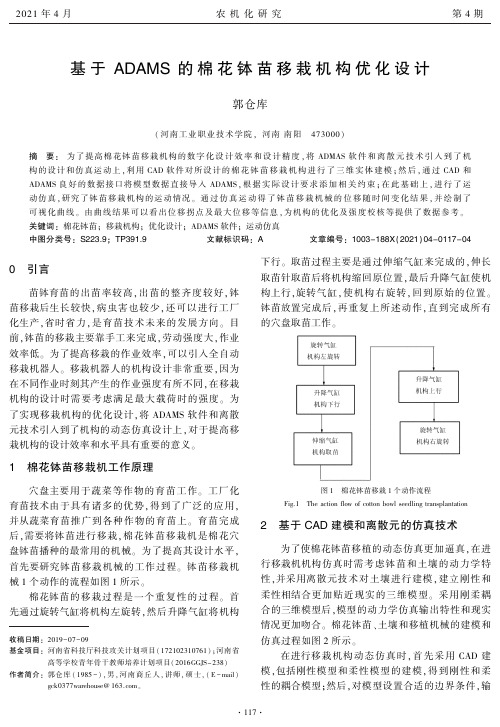
气缸
电磁阀和气缸润滑,气动回路中还必须有气压调节表、空气滤清器和油 雾器。
1- 气动三联件 2- 三位五通电磁换向阀 3- 单向节流阀 4- 气缸 图 2 气动回路图
2.气缸运动的工作原理 当滚载轮上的吊杯转到离左侧水平面 θ 角时,此处传感器发出信 号,电磁铁 2YA 带电,电磁阀右位处于工作状态,压缩空气经气动三联 件→换向阀右位→气缸右腔,左腔气体→单向节流阀→电磁换向阀排 出,活塞杆左移伸出,推动分钵落苗装置的垂直推杆向左运动,当活塞 运动到位置 B 时,开始落苗,磁性开关发出信号给时间继电器并延时, 同时让电磁铁 2YA 失电,活塞停止运动。当延时时间结束,时间继电器 发出信号,让电磁铁 1YA 带电,电磁阀换向,压缩空气经气动三联件→ 换向阀左位→单向阀→气缸左腔,右腔气体→电磁换向阀排出,活塞杆 右移缩回,分钵器拨齿在回复拉伸弹簧的作用下回复打开位置,允许阻 挡的钵苗通过;垂直推杆在螺栓导杆外的回复压缩弹簧的作用下复位。 三、分钵落苗系统的仿真分析 用 ADAMS/View 对分钵落苗装置进行建模,建完整体模型图后,进 行运动仿真。仿真结果如图 3- 图 7 所示。
电磁振动棉花精密播种装置的设计资料

目录1. 绪论 (1)1.1 研究的目的和意义 (1)1.2 常见的几种精密播种装置 (3)1.3 课题主要研究内容 (4)2. 电磁振动式棉花精密播种装置的设计 (4)2.1 电磁振动播种装置的整体设计方案 (4)2.2 机架的设计 (6)2.3 电磁振动排种器的设计 (6)2.3.1 电磁振动排种器的工作原理 (6)2.3.2 种子的受力分析 (8)2.3.3 种子的运动分析 (10)2.3.4 电磁振动式棉花精密排种器主要参数的设计 (11)2.3.5 排种盘基本结构尺寸 (12)2.4 分流回收装置的设计 (14)2.4.1 分流通道的基本结构及动作过程 (15)2.4.2 孔的设计 (16)2.4.3 电磁铁和弹簧的选择 (18)2.5 钵盘输送机构的设计 (19)2.6 其它附属设备 (20)3. 结论 (20)结束语 (21)参考文献 (22)致谢 (23)分流式电磁振动棉花精密排种装置的设计学生:万子明指导教师:刘永洪摘要:棉花营养钵育苗移栽是具有中国特色的植棉手段之一,在我国内陆棉区已得到较大规模的推广应用。
实现棉花机械化精密播种是进行棉花工厂化制钵育苗的关键,但是近些年来,对棉花种子尤其是光籽棉种机械化精播的研究及相关设备几乎是空白。
本课题在对多种播种装置的比较研究的基础上,提出了电磁振动式棉花精密播种的思想。
为了实现光籽棉种的单粒精播,设计了电磁振动式棉花精密播种装置,该装置主要包括电磁振动排种器、分流回收装置和钵盘输送机构。
通过对电磁振动排种器工作原理的分析,得出了实现种子连续前移的条件,在此基础上完成了对电磁振动排种器的参数选择,在保证棉种单列有序排列的前提下,完成了排种盘基本结构尺寸的结构设计;根据棉种的形状尺寸设计出了孔的形状尺寸和分流装置的结构形式。
实现了种子的单粒精密播种,单粒率达到了90%以上。
关键词:棉花,电磁振动,精密播种,控制Design of Diffluence Electromagnetic Vibration CottonPrecision Seeding DeviceStudent:wanziming Teacher:liuyonghong Abstract:Growing and transplanting seedling of cotton, which is one of Chinese cotton planting methods has been widely applied and popularized throughout the cotton planting areas in our country. The key process of industrialized bowl-making and growing of cotton is the realization of mechanically precision seeding, but the study on the technology and equipment of mechanically precision seeding of cottonseed is still blank. In this paper, electromagnetic vibration precision theory used in cotton precision seeding was put forward firstly.Electromagnetic vibration cotton precision seeder was designed to realize precision seedling of bare cottonseed. This seeder was composed of three parts, which were electromagnetic vibration feeder, diffluent device and bowl feeding device. Through theory analysis of the feeder, the continuous slippage condition of cottonseed was gained, which provided theory base for the design of electromagnetic vibration feeder. And on the base of ordinal single-line of cottonseed the structure dimensions of electromagnetic vibration feeder were got. According to the figure and dimension of cottonseed, the figure and dimension of hole and diffulent device was designed. Precision seeding was achieved and rate of holes withsingle seed is over 90%.Key words: cotton, electromagnetic vibration, precision seeding, control前言棉花是我国重要的经济作物,种植历史已有5000年之久,但长久以来种植方式仍然是人工播种,效率低,方式落后,还要占用大量的人力资源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
优秀设计学科门类:单位代码:毕业设计说明书(论文)棉花移栽机的研究与设计(Research and design of the cotton transplanting machine)学生姓名所学专业班级学号指导教师XXXXXXXXX系二○**年XX月任务书课题名称棉花移栽机的研究与设计Ⅰ、题目的目的和要求:本课题的主要目的是研制一种棉花移栽机械,使其能够大大降低农民的劳动强度,提高劳动生产效率和农民种植棉花的积极性,从而使棉花种植得到普及。
在设计过程中,一切从农民的角度的出发,力求设计简单实用,尽量降低制造成本,满足广大农民的需求。
并且在吸收和借鉴国内外移栽机优势的前提下,设计出一款合理的样机。
Ⅱ、设计技术要求与数据(或论文主要内容):要求学生设计一款能够和泰山12或泰山25拖拉机相配合的移栽机,该机具应结构简单,实用性强。
为提高此种移栽机的通用性,要求设计时多采用标准件,并且能够在一定范围内对移栽机的行距和株距进行微调。
棉花钵苗的基本形状为一ф40mm的圆柱体,高约为80mm,行距为60—100mm,株距为35mm左右Ⅲ、设计(论文)工作起始日期:自二○**年二月十四日起,至二○**年六月十五日止Ⅳ、进度计划与应完成的工作:第一周进行资料的收集,并初步完成总共大约5000字符外文资料的翻译工作;第二周进行相关机具的参观和调研,以及相关资料的整理;第三周至第五周提出相关的技术方案并进行论证和关键部件的模拟试验来验证方案,并确定方案第六周至第十四周进行结构设计并且完成3张0#图纸的绘制;第十五周至第十六周撰写约15000字符的毕业论文;第十七周毕业答辩Ⅴ、主要参考文献、资料:【1】李其昀,汪遵元双输送代式栽植器的试验研究《农业工程学报》1997 13(3) 124-127页【2】《我国棉花营养钵移栽机械现状与发展趋势》,夏俊芳·王树才·许绮川,中国农机化,2002年第1期,36~37【3】封俊,顾世康,曾爱军,宋卫唐,刘亚佳,胡鸿烈导苗管式移栽机的试验研究(1) 《农业工程学报》1998 14(1) 103-107页【4】封俊,顾世康,曾爱军,宋卫唐,刘亚佳,胡鸿烈导苗管式移栽机的试验研(2)《农业工程学报》1998 14(2)73-77页【5】封俊,顾世康,曾爱军,宋卫唐,刘亚佳,胡鸿烈导苗管式移栽机的试验研究(3)《农业工程学报》1998 14 (3)【6】封俊,顾世康,曾爱军,宋卫唐等夏玉米免耕覆盖移栽的试验研究《农业工程学报》2000 16(3)【7】孙学振,施培,张红,周治国棉花育苗移栽页地膜覆盖高产栽培技术研究进展《中国农学通报》 1999 (2)【8】北京市农业机械研究所悬挂4行玉米移栽机《农机情报资料》1974 (1)【9】宋卫唐,2ZDF型半自动导苗管式移栽机《农业机械》1999 11 29 【10】邱宣怀主编机械设计(第四版)高等教育出版社 2001【11】王兰美、刘衍聪主编现代工程制图高等教育出版1999【12】中国农业科学研究院编农业机械手册机械工业出版社 1998【13】R.L.Norton,Design of Mechinary, McGraw-Hill,New York,1992【14】 B.Paul,in: Kinematics and Dynamics of Planar Machinery,Prentice-Hall,New, Jersey, 1981目录摘要 (1)1前言 (2)2移栽机械的国内外现状 (3)3 设计方案的选择 (4)3.1 钳夹式移栽机 (4)3.2 链夹式栽植机 (4)3.3 挠性圆盘移栽机 (4)3.4 吊篮式移栽机 (4)3.5 导苗管式移栽机 (5)3.6带式栽植机 (5)4 机具的机构特点 (6)4.1整机机构特点 (6)4.2主要技术参数 (6)4.3主要工作部件的结构特点及作用 (7)4.3.1 地轮 (7)4.3.2 开沟器 (7)4.3.3 镇压轮 (7)4.3.4 覆土器 (7)4.4设计棉花移栽机械的原理 (8)4.4.1 零速原理 (8)4.4.2 栽植机械的结构设计 (8)5 地轮轴的校核 (10)6 设计时间的安排 (13)7 结论和总结 (14)8 谢词 (14)参考文献 (15)摘要根据作物育苗移栽的农艺要求,在分析了国内外众多移栽机的基础上优化设计了适合棉花营养钵育苗移栽的的关键部件,并通过作业效果调查,分析研究了机械栽苗的一般规律,找出了影响栽苗效果的若干因素,确立了主要的工作部件的参数选择关键词:移栽机营养钵棉花AbstractAccording to the requirement for agronomy transplantation to grow seedlings ,we have found a good method to the ones that are suitable for the cotton nutrition earthen bowl and grow seedlings and transplant in optimization design on the foundation of analyzing numerous transplanting machines both at home and abroad ,and through the investigation of the result of the homework, we have analysed and researchd the universal law of the plant shoots in machinery and found some factors that affect the result of plant shoots,and have established the parameter of the main part of the machine.Key words : transplantation nutrition bowl cotton1、引言我国是棉花种植大国,无论是种植面积还是单位面积产量,都位于先进植棉大国的前列。
20世纪90年代,我国年平均植棉面积达550万公顷,居世界第一位;皮棉总产450万吨,单产亦位居世界棉花高产国家的前列。
与先进植棉大国相比,我们的棉花生产方式落后、经营规模小、劳动生产率低、生产成本比较高。
我国平均生产50千克皮棉的用工量为30-40个工日,而美国只要0.5个工日。
同样等级的皮棉,国产棉每吨进厂价要比进口棉高出2000多元。
由于进口棉价格低,造成国产棉库存急增,储备量过大,国家每年为此付出的财政补贴高达数拾亿元。
加入WTO以后,棉花及其制品还将进一步市场化、国际化。
此外,由于我国面临着可耕土地逐年递减、人口迅速增加和粮食需求不断增长的形式。
同时,由于生态平衡不断遭到破坏、干旱日趋严重,使一些地区不得不把提高农业产量作为农业发展战略中的一个重要目标。
面对形势,围绕节本增效,建立技术、资金、信息密集的现代化棉花生产体系已成为当务之急。
其中包括不失时机地推广适用的棉花生产机械化技术。
例如棉花移栽机的推广。
棉花移栽的优点主要体现在以下几个方面:(1) 有利于培育壮苗和实现全苗密植。
缺苗断垄和弱苗迟发是棉花生产上一直存在的重要问题,实行营养钵育苗塑膜覆盖后,由于塑膜的透光性较好,可迅速提高苗床温度,加之苗床内水分适宜,满足了种子发芽出土的需求,从而有效地克服了早青低温干旱或低温高湿对播种保苗带来的不利影响。
苗床内水分适宜,满足了种子发芽出土的需求,从而有效地春服了早青低温干旱或低温高湿对播种保苗带来的不利影响。
苗床内播期可提早20~30天,不仅实现了棉苗早、全、齐、匀、壮、还有效地延长了生育期,为以后棉花早发早熟奠定了基础。
移栽时可按计划行株距栽苗,实现了全苗密植,有效地解决了直播棉存在的出苗不易、保苗也难的问题。
(2) 有利种植制度改革。
作物育苗移栽能提前播种育苗、增加有效面积、延长生长期保证按时成熟,移栽的作物根系发达、茎杆粗壮、成熟一致抗倒伏、产量高。
黄河流域的两熟棉区,大多实行麦棉套种。
由于麦棉共生期长,争水、争肥、争光矛盾十分突出,棉花难于实现全苗早发,常易造成晚熟晚产。
棉花实现麦行套栽,既缩短了麦棉共生期,又延长了棉花生育期,因此,棉花产量可比麦行套种增产2~4成。
同样,在长江中下游地区,麦子,油菜均为满幅种植,不预留棉行。
麦、油收获后,通过移栽棉花的方法,实现了提高复种指数,一地两收,麦棉、油棉双增产,大大提高了农民的经济收入。
(3) 有利于增强棉花抗逆力,盐碱为害。
是盐碱地植棉的主要障碍。
黄河流域棉区的次生化盐碱地和沿海盐渍土,采用棉花育苗移栽后,克服了直播播种保苗困难和棉苗晚发晚熟问题,实现了全苗密植和棉苗早发早熟,棉花的抗逆力提高,产量增加了2~3成。
因此,棉花已成为改良利用盐碱地的先锋作物。
长江流域的稻棉轮作区,由于稻茬土性较冷,土质透气性较差,第一年播种棉花很难出苗,而且迟发晚熟。
采用育苗移栽能够有效地解决直播棉难于保全苗和棉棵迟发晚熟带来的产量低、品质差等问题。
(4)有利于提高农作物的产量,有利于提高土地的复种指数,有利于减轻农民的劳动强度,提高工作效率,同直播相比,有着无可比拟的优势。
(5)避开春旱或秋冻,改套种为移栽,解决套种机械化收获困难的问题等,并且机械移栽的行距、株距和深度一致,质量稳定可靠。
(6)在北方,棉花经过育苗移栽之后,生育器增长,产量增加,经济效益显著,这是众所周知的。
但是人工栽苗存在着保苗率低、栽植均度差和成活率低等缺陷,不能完全发挥出玉米育苗移栽后产生的巨大增产优势,另外巨大的劳动强度也使那些棉花种植户难以忍受,为实现棉花育苗移栽规模化,必须实现机械化。
2、移栽机械的国内外现状我国在旱地栽植机械方面的研究开发工作始于六十年代,七十年代开始研制裸根苗移栽机,最早用于甜菜移栽,八十年代研制成半自动蔬菜移栽机。
近几年来,随着育苗技术的发展以及劳动力成本的上升,推动了栽植机械的研制开发工作,又出现了新的栽植机械。
但从总体上讲,目前我国研制使用的移栽机械都是半自动式的,全自动移栽机械因结构复杂,成本高而处于研究起步阶段。
目前国内主要采用人工移栽的方法,根据使用的移栽工具不同主要有扎孔移栽法、鸭嘴移栽器移栽法、垄上开沟法和穴栽法等。
无论何种人工移栽方法,都存在劳动强度大、生产效率低、移栽质量不能保证等问题。
我国是个棉花种植大国,棉花生产在国民生产总值占着相当重要的作用,但由于上述原因使得广大农民朋友失去了种植棉花的积极性,对我国的经济造成了一定的损失。