白菜移栽机的实体设计
133大白菜收获机机械部分设计——提升运输机构的设计(含全套说明书和CAD图纸)解读
学校代码:10410序号:050395本科毕业设计题目:大白菜收获机机械部分设计——提升运输机构的设计学院:工学院姓名:李传龙学号: 20050395专业:机械设计制造及其自动化年级: 05级指导教师:肖丽萍二OO九年五月摘要随着新的农业生产模式和新技术的发展与应用,农业机器人将成为农业生产的主力军。
该文在分析大白菜收获机工作特点的基础上,从大白菜的采摘、转运、打包等方面进行分析。
其中主要对提升运输部分做了详细的设计说明。
该大白菜收获机适用于中小规模收割大白菜,结构简单、制造成本低。
该大白菜收获机的提升运输部分采用带式输送,而张紧装置作为带式输送机构中不可缺少的重要组成部分,对带式输送机的稳定运行有着至关重要的作用。
本文内容包括机架设计方案,平带带轮和平带的选择,轴的校核,以及张紧装置的作用、类型,且设计了张紧装置的总体方案,对其主要零部件的设计和选型进行了说明。
所设计的张紧装置使用螺杆作为张紧执行元件,具有张紧力可调、结构简单、适应性强、控制方便、安全性能好等特点。
关键词:大白菜、收获机、带式提升输送装置、张紧装置、螺杆Designing Of Hoisting And Transporting MechanismFor C abbage Harvest MachineryAbstractFarm machinery is to become the capital ship of the agriculture.This paper introduced gathering ,transporting and packing cabbage,on the basis of the working peculiarity of the cabbage harvest machinery,and it mainly introduced its transporting mechanism. The cabbage harvest machinery is suitable to gather in the cabbage for family expenses.The cabbage harvest machinery use belt conveyors as its transporting mechanism,while Tensioning device, as an important and indispensable component of the belt conveyor, has a vital role to the stable operation of the belt conveyor . This paper introduces the role of the tensioning device,type,installation layout principles, and its development profile.And then raised the tension of the belt conveyor to the tension and take-up device requirements, on the basis the analysis of the principle of the transmission belt conveyor. In this paper, the main device design programme of the automatically tensioning device have been introduced, and descripte its main components for the design and selection of the note.The tensioning device use the screwstaff as the take-up of the implementation component.,with adjustable tension, simple, strong adaptability and control convenience, performance and safety and so on. Keywords:C abbage harvest;machinery;Belt hoisting and transporting mechanism;tensioning;Screwstaff目录1 绪论 (1)2 大白菜收获机总体和主要部件简介。
蔬菜移栽机的研究与设计本科毕业设计
蔬菜移栽机的研究与设计毕业设计(论文)原创性声明和利用授权说明原创性声明本人郑重许诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的功效。
尽我所知,除文中专门加以标注和致谢的地址外,不包括其他人或组织已经发表或发布过的研究功效,也不包括我为取得及其它教育机构的学位或学历而利用过的材料。
对本研究提供过帮忙和做出过奉献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:利用授权说明本人完全了解大学关于搜集、保留、利用毕业设计(论文)的规定,即:依照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保留毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览效劳;学校能够采纳影印、缩印、数字化或其它复制手腕保留论文;在不以获利为目的前提下,学校能够发布论文的部份或全数内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究功效。
除文中专门加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的功效作品。
对本文的研究做出重要奉献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权利用授权书本学位论文作者完全了解学校有关保留、利用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,许诺论文被查阅和借阅。
本人授权大学能够将本学位论文的全数或部份内容编入有关数据库进行检索,能够采纳影印、缩印或扫描等复制手腕保留和汇编本学位论文。
涉密论文按学校规定处置。
作者签名:日期:年月日导师签名:日期:年月日指导教师评阅书评阅教师评阅书教研室(或答辩小组)及教学系意见目录摘要 (1)1前言 (6)2移栽机械的国内外现状 (8)3 设计方案的选择 (8)钳夹式移栽机 (8)链夹式栽植机 (9)挠性圆盘移栽机 (10)吊篮式移栽机 (10)导苗管式移栽机 (12)带式栽植机 (19)4 机具的机构特点 (20)整机机构特点 (20)要紧技术参数 (21)要紧工作部件的结构特点及作用 (21)4.3.1 地轮 (21)4.3.2 开沟器 (22)4.3.3 镇压轮 (22)4.3.4 覆土器 (22)设计蔬菜移栽机械的原理 (23)4.4.1 零速原理 (23)4.4.2 栽植机械的结构设计 (23)5 地轮轴的校核 (26)6 设计时刻的安排 (31)7 结论和总结 (32)8致谢词 (32)9 主要参考文献、资料 (32)摘要移栽是蔬菜生产进程中的一个重要环节,具有对气候补偿和使作物生育提早的综合效益。
小型蔬菜移栽机的研究与设计-控制与仪器毕业论文
学士学位毕业设计小型蔬菜移栽机的研究与设计学生姓名:***学号:****************指导教师:******所在学院:工程学院专业:机械设计制造及其自动化中国·大庆2012年4月毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
旱地蔬菜移栽机移栽机构设计与试验
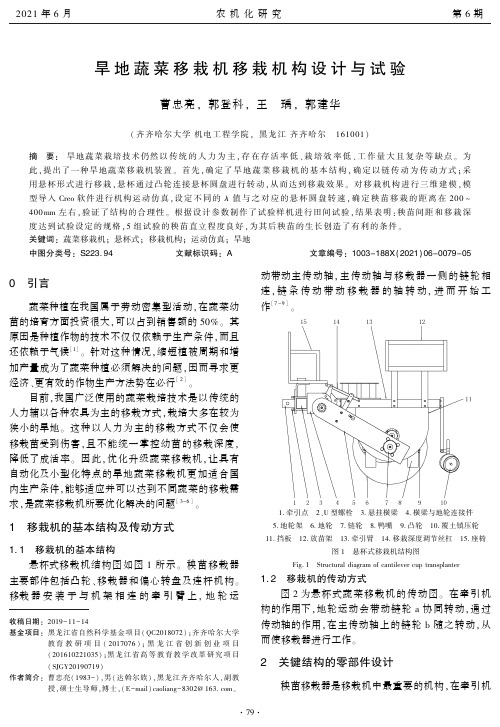
旱地蔬菜移栽机移栽机构设计与试验曹忠亮,郭登科,王㊀瑀,郭建华(齐齐哈尔大学机电工程学院,黑龙江齐齐哈尔㊀161001)摘㊀要:旱地蔬菜栽培技术仍然以传统的人力为主,存在存活率低㊁栽培效率低㊁工作量大且复杂等缺点㊂为此,提出了一种旱地蔬菜移栽机装置㊂首先,确定了旱地蔬菜移栽机的基本结构,确定以链传动为传动方式;采用悬杯形式进行移栽,悬杯通过凸轮连接悬杯圆盘进行转动,从而达到移栽效果㊂对移栽机构进行三维建模,模型导入Creo软件进行机构运动仿真,设定不同的λ值与之对应的悬杯圆盘转速,确定秧苗移栽的距离在200~ 400mm左右,验证了结构的合理性㊂根据设计参数制作了试验样机进行田间试验,结果表明:秧苗间距和移栽深度达到试验设定的规格,5组试验的秧苗直立程度良好,为其后秧苗的生长创造了有利的条件㊂关键词:蔬菜移栽机;悬杯式;移栽机构;运动仿真;旱地中图分类号:S223.94㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2021)06-0079-050㊀引言蔬菜种植在我国属于劳动密集型活动,在蔬菜幼苗的培育方面投资很大,可以占到销售额的50%㊂其原因是种植作物的技术不仅仅依赖于生产条件,而且还依赖于气候[1]㊂针对这种情况,缩短植被周期和增加产量成为了蔬菜种植必须解决的问题,因而寻求更经济㊁更有效的作物生产方法势在必行[2]㊂目前,我国广泛使用的蔬菜栽培技术是以传统的人力辅以各种农具为主的移栽方式,栽培大多在较为狭小的旱地㊂这种以人力为主的移栽方式不仅会使移栽苗受到伤害,且不能统一掌控幼苗的移栽深度,降低了成活率㊂因此,优化升级蔬菜移栽机,让具有自动化及小型化特点的旱地蔬菜移栽机更加适合国内生产条件,能够适应并可以达到不同蔬菜的移栽需求,是蔬菜移栽机所要优化解决的问题[3-6]㊂1㊀移栽机的基本结构及传动方式1.1㊀移栽机的基本结构悬杯式移栽机结构图如图1所示㊂秧苗移栽器主要部件包括凸轮㊁移栽器和偏心转盘及连杆机构㊂移栽器安装于与机架相连的牵引臂上,地轮运收稿日期:2019-11-14基金项目:黑龙江省自然科学基金项目(QC2018072);齐齐哈尔大学教育教研项目(2017076);黑龙江省创新创业项目(201610221035);黑龙江省高等教育教学改革研究项目(SJGY20190719)作者简介:曹忠亮(1983-),男(达斡尔族),黑龙江齐齐哈尔人,副教授,硕士生导师,博士,(E-mail)caoliang-8302@㊂动带动主传动轴,主传动轴与移栽器一侧的链轮相连,链条传动带动移栽器的轴转动,进而开始工作[7-9]㊂1.牵引点㊀2㊁U型螺栓㊀3.悬挂横梁㊀4.横梁与地轮连接件5.地轮架㊀6.地轮㊀7.链轮㊀8.鸭嘴㊀9.凸轮㊀10.覆土镇压轮11.挡板㊀12.放苗架㊀13.牵引臂㊀14.移栽深度调节丝杠㊀15.座椅图1㊀悬杯式移栽机结构图Fig.1㊀Structural diagram of cantilever cup transplanter1.2㊀移栽机的传动方式图2为悬杯式蔬菜移栽机的传动图㊂在牵引机构的作用下,地轮运动会带动链轮a协同转动,通过传动轴的作用,在主传动轴上的链轮b随之转动,从而使移栽器进行工作㊂2㊀关键结构的零部件设计秧苗移栽器是移栽机中最重要的机构,在牵引机2021年6月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第6期构及链传动的作用下,移栽器会做循环圆周运动㊂移栽器与主动圆盘和从动圆盘组成了多杆机构的曲柄,与圆盘共同做圆周运动㊂当悬杯运动到最高点时,秧苗放入悬杯中;随着圆盘的转动,悬杯运动到离地面最近的时候,悬杯末端的鸭嘴在凸轮的作用下将秧苗投放到悬杯打好的孔中,插秧完成;完成插秧后,鸭嘴在自身弹簧的作用下合并,悬杯再次运动到最高点时,完成1个工作周期㊂蔬菜移栽器工作示意图如图3所示㊂1.地轮㊀2.移栽器㊀3.链轮组a㊀4.链条㊀5.主传动轴㊀6.链轮组b图2㊀蔬菜移栽机传动图Fig.2㊀Drive Chart of Vegetable Transplanter1.牵引机架㊀2.偏心导轨㊀3.链轮㊀4.悬杯5.凸轮㊀6.主动圆盘㊀7.从动圆盘图3㊀蔬菜移栽器工作示意图Fig.3㊀Working schematic diagram of vegetable transplanter2.1㊀悬杯的设计悬杯的运动由两个运动合成:一是动力装置带动移栽机前进或后退的线性运动,另一个是悬杯随着圆盘所做的圆周运动㊂悬杯的运动轨迹如图4所示㊂当选取悬杯的主动圆盘的圆心为零点,建立直角坐标系,得出悬杯在X㊁Y方向上的运动方程为X=V车t+R盘cosωt(1)Y=-R盘sinωt(2)式中㊀V车 拖拽设备的行驶速度;㊀R盘 悬杯圆盘的半径;㊀ω 悬杯圆盘的角速度;㊀t 悬杯运动的时间㊂令λ=R盘ωV车,可以得出:当λ>1时,悬杯的运动轨迹为Ⅰ;当λ=1时,悬杯的运动轨迹为Ⅱ;当λ>1时,悬杯的运动轨迹为Ⅲ㊂当悬杯随着圆盘运动到A 点时,悬杯在凸轮的作用下鸭嘴被打开,当鸭嘴打开的角度变得最大时,悬杯离地面最近;此时,悬杯位于图像B点,完成插秧后,悬杯上升,鸭嘴随之关闭㊂所以,当λ>1时,为最佳投苗时间的选择范围㊂图4㊀悬杯的运动轨迹Fig.4㊀Motion analysis of cantilever cup确定了悬杯的运动轨迹后,则V车=f60㊃S(3)式中㊀f 蔬菜的移栽频率;㊀S 秧苗之间的距离㊂令f=60株/min(蔬菜的种植频率可取为40~70株/min),秧苗之间的距离S与频率f成正比关系㊂当λ>1时,由λ=R盘ω/V车可以得出R盘ω/V车>1(4)此时,把式(3)带入式(4)中,得N<2πR盘/S(5)式中㊀N 悬杯的个数㊂悬杯圆盘半径取R=200mm,悬杯个数N与秧苗与秧苗之间的距离S的关系如表1所示㊂表1㊀极限悬杯数量与秧苗间距的关系Table4㊀Relationship between limit cup number and seedling spacing秧苗间距/mm悬杯数量/个秧苗间距/mm悬杯数量/个20063004400350026002㊀㊀市面上流通的蔬菜在进行移栽时秧苗之间的距2021年6月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第6期离大多在300~400mm之间,定义悬杯圆盘半径R= 200mm,通过表3与表4可知,圆盘上的悬杯个数为3个最为合理㊂2.2㊀传动比计算移栽机的总传动比为i 总=ωω地=2πR地NS(6)式中㊀i总 移栽机的总传动比㊂由式(6)可以看出:悬杯个数N和地轮半径R地之间的关系㊂给定地轮半径R地=305mm,为了适应不同蔬菜的移栽要求,使秧苗之间的距离为200~400mm,带入式(6)得到移栽机的总传动比的取值范围为1.597~3.192㊂移栽机为二级传动链轮,所以移栽机的总传动比的另一种表示形式为i 总=Z地Z aˑZ bZ盘(7)式中㊀Z地 地轮所用链轮的齿数;㊀Z盘 与圆盘相连的齿轮齿数;㊀Z a 与Z地链传动的齿轮齿数;㊀Z b 与圆盘齿轮链传动齿轮齿数㊂Z a与Z b在同一传动轴上,可以得到秧苗间的距离为S=2πR地Ni总(8)式中㊀R地 地轮半径;对于小型自动化的移栽机而言,齿轮的大小要适合机器本身要求,所以确定Z地=23齿,Z a=17齿,Z b =27齿,Z盘=23齿,则i23=2317ˑ2723=1.588(9)S23=2πˑ3053ˑ1.588=402mm(10)由式(9)和式(10)可知:当齿轮的齿数为23齿时,总传动比为i23=1.588,秧苗之间的距离为S23= 402mm㊂3㊀移栽机构运动仿真在SoildWorks中建立好三维模型后,导入Creo中进行运动仿真㊂在Creo中对各个独立的零件添加运动副和约束,目的是为了验证所设计的移栽机构能否达到预期的运动目标㊂图5为移栽机构的仿真约束图㊂图5㊀移栽机构仿真约束图Fig.5㊀Simulation constraint diagram of transplanting mechanism当λ<1(λ=0.5)时,悬杯的运动轨迹如图6所示;当λ=1时,悬杯的运动轨迹如图7所示;当λ> 1(λ=1.6)时,悬杯的运动轨迹如图8所示㊂图6㊀λ<1时悬杯的运动轨迹Fig.6㊀The trajectory of the suspension cup whenλ<1图7㊀λ=1时悬杯的运动轨迹Fig.7㊀The trajectory of the suspension cup whenλ=1图8㊀λ>1时悬杯的运动轨迹Fig.8㊀The trajectory of the suspension cup whenλ>1当λ=1时,悬杯投放完秧苗后,秧苗在一瞬间是不能进入打好的孔中,而是有一个下落的过程;当λ<1时,悬杯在插秧的过程中不能完成1个完整的插秧动作,因而也不是最佳选择;只有当λ>1时,悬杯的运动轨迹才符合蔬菜移栽的要求㊂λ>1时悬杯的运动仿真图如图9~图11所示㊂移栽前进方向的位移分量随时时间变化如图9所示㊂移栽前进方向的速度分量随时时间变化如图10所示㊂移栽前进方向的加速度分量随时时间变化如图11所示㊂图9㊀λ>1时悬杯的位移Fig.9㊀Displacement of the suspension cup Whenλ>1图10㊀λ>1时悬杯的速度Fig.10㊀The velocity of the suspension cup whenλ>1图11㊀λ>1时悬杯的加速度Fig.11㊀Acceleration of the suspension cup in whenλ>1保证移栽秧苗的直立度是蔬菜种植的基本要求㊂通过移栽机构的运动仿真图分析并根据 零速投苗 [10]原理可知:当λ>1时,速度在水平方向上的矢量才会出现零点㊂因此,λ>1是移栽机正常工作的必要条件㊂移栽机的总传动比计算公式为i 总=ωω地=2πR地NS(3-1)式中㊀ω地 地轮的角速度㊂秧苗间距㊁传动比㊁λ之间的关系如表2所示㊂由表2可以看出:只有当株距小于400mm时,λ>1㊂所以,可以得出总传动比的取值范围是在1.596~3.192之间㊂由此确定能够实现的蔬菜移栽范围是200~400mm㊂表2㊀秧苗间距㊁传动比㊁λ之间的关系Table2㊀Relationships among seedling spacing,transmission ratio andλ秧苗间距/mm传动比λ200 3.192 2.128250 2.554 1.703续表2秧苗间距/mm传动比λ300 2.128 1.418350 1.824 1.216400 1.596 1.0634㊀试验4.1㊀试验装置及条件为了验证悬杯式蔬菜移栽机机构设计的正确性,进行了移栽机送苗装置运行试验,在分布均匀的田间土壤上进行西兰花幼苗的移栽试验㊂相关参数如表3所示㊂表3㊀移栽机的主要设计参数Table3㊀Main design parameters of transplanter参数项目单位数据移栽机尺寸(长ˑ宽ˑ高)mm1445ˑ1478ˑ1245移栽机行驶速度m/s0.3种植行数2钩挂形式三点悬挂动力需求kW18或18以上行距mm400秧苗间距离规格mm320移栽深度mm404.2㊀试验分析以表3设定的相关数据作为试验参数,进行田间试验,得出数据如表4所示㊂由表4可知:秧苗间距和移栽深度达到试验设定的规格,5组试验的秧苗直立程度良好,为其后秧苗的生长创造了有利条件㊂表4㊀蔬菜移栽机实验数据记录Table4㊀Experimental data record of vegetable transplanter 组次试验秧苗株数试验数据平均秧苗间距/mm直立合格率/%平均移栽深度/mm 1100322.69541.42100318.59338.53100320.89740.74100318.29439.25100317.59440.95㊀结论设计了一种蔬菜移栽机,采用悬杯式移栽机构㊂通过运动仿真分析得知:当λ>1时,悬杯运动到最低点,悬杯运动的速度在水平方向上的瞬时速度矢量与地面的相对速度为零,即 零速投苗 ㊂试验结果表明:秧苗被平稳地插入土壤中,并获得了优良的直立度,两株秧苗移栽的距离在200~400mm,为其后秧苗的生长创造了有利的条件㊂移栽机构具有良好的工作可靠性和适应性,能够达到一般蔬菜的移栽要求㊂参考文献:[1]㊀冯时佳,谢俊,朱伟,马履中.秧苗移栽机器人的运动控制研究[J].机械设计与制造,2008(3):166-168. [2]㊀汤修映,侯书林,朱玉龙,等.油菜移栽机械化技术研究进展[J].农机化研究,2010,32(4):224-227.[3]㊀谢俊,尹小琴,马履中,等.基于多轴运动控制器的三自由度并联秧苗移栽机器人的研究[J].机械科学与技术, 2011,30(2):336-339,344.[4]㊀潘启明.国内外移栽机技术现状与发展趋势[J].安徽农业科学,2013,41(31):12478-12479.[5]㊀于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J].农业机械学报,2014(8):44-53.[6]㊀汤修映,侯书林,朱玉龙.等.油菜移栽机械化技术研究进展[J].农机化研究,2010,32(4):224-227. [7]㊀杨华,韩宏宇,窦钰程,等.我国旱地移栽机械的现状及发展建议[J].农机使用与维修,2012(3):32-33. [8]㊀王君玲,高玉芝,李成华.旱地钵苗移栽机械化生产的现状及发展趋势[J].农业机械化与电气化,2003(5):5-6.[9]㊀BIOTECHNOLOGY.Research conducted at university of pisahas provided new information about Biotechnology(A field vegetable transplanter for use in both tilled and no-till soils)[J].Biotech week,2019,62(3):593-602. [10]㊀张荣毅,张祖立,翟殿波,等.悬杯式蔬菜移栽机栽植单体的数字化设计[J].农机化研究,2013,35(5):107-110,118.Design and Motion Simulation of Key Parts ofVegetable Transplanter in DrylandCao Zhongliang,Guo Dengke,Wang Yu,Guo Jianhua(School of Mechatronics Engineering,Qiqihaer University,Qiqihar161001,China) Abstract:Dryland vegetable cultivation techniques are still dominated by traditional manpower,and have shortcomings such as low survival rate,low cultivation efficiency,large workload and complexity.Based on the above problems,this paper proposes a dryland vegetable transplanting device.Firstly,the basic structure of the dryland vegetable transplanting machine was determined.The design of the chain transmission was determined.The transplanting mechanism was trans-planted in the form of a hanging cup.The hanging cup was rotated by the cam to connect the hanging cup disc to achieve the transplanting effect.The three-dimensional software is used to carry out three-dimensional modeling of the transplan-ting mechanism.The model is imported into Creo software for mechanism motion simulation,and differentλvalues corre-sponding to the hanging cup disk rotation speed are set,so that the distance of seedling transplanting is determined to be 200mm~400mm.Left and right,verified the rationality of the structure.The test samples were made according to the design parameters for field experiment.The results showed that the seedling spacing and transplanting depth reached the specifications set by the experiment.The seedlings of the five groups were well-erected,which created favorable condi-tions for the growth of the seedlings.Key words:vegetable transplanter;cantilever cup;transplanting mechanism;motion simulation;dryland。
蔬菜移栽机的覆土镇压器设计
蔬菜移栽机的覆土镇压器设计万霖;汪春;车刚;张吉军;张燕梁【摘要】旱地移栽时需要秧苗稳定并牢固的压紧在泥土内,通过覆土镇压器进行覆土和压实,覆土镇压器的研究非常重要。
通过受力分析,进行压强及应力计算,确定了主要工作部件的结构和性能参数,满足农艺要求,为小型蔬菜移栽机的设计提供一定的技术支持。
%When transplanting in dry land, seedlings would be stable and firmly pressed in the soil using roller sealer to earth up and compact, so the research of roller sealer was very important. The structure and performance parameters of the main working parts was confirmed by force analysis and the pressure and stress calculation.It could provide a certain technical support for the design of small size vegetable transplanter to meet agricultural technology requirements.【期刊名称】《黑龙江八一农垦大学学报》【年(卷),期】2012(024)003【总页数】4页(P16-18,27)【关键词】蔬菜移栽机;覆土镇压器;设计【作者】万霖;汪春;车刚;张吉军;张燕梁【作者单位】黑龙江八一农垦大学工程学院,大庆163319;黑龙江八一农垦大学工程学院,大庆163319;黑龙江八一农垦大学工程学院,大庆163319;黑龙江八一农垦大学工程学院,大庆163319;黑龙江八一农垦大学工程学院,大庆163319【正文语种】中文【中图分类】S223.6蔬菜移栽机属于旱地栽植机械,满足:农业技术的秧苗要求,土壤要求,栽培方式,生长要求。
蔬菜移植机插苗系统设计说明书
1.课程设计背景和引言1.1设计背景本次课程设计,是在学院资深指导老师的亲自指挥和指导下完成的,旨在培养学生的创新思维能力和动手操作能力。
学院高度重视学生实践环节的进行,为给社会输送更多的有用人才而努力。
我国历来都是一个农业大国,在国际化背景下,我国农业不可避免的卷入世界农业生产体系和交换体系当中。
所以发展和改进我国的农业机械产品迫在眉睫,刻不容缓。
学院从实际情况出发,根据我国农业发展在现阶段的大背景,学院给出了十几个具体的设计题目,让学生亲自动手进行设计,可见学院领导对教学实践环节的重视以及指导老师们的不懈努力!1.2 设计的目的及意义课程设计是学校教学环节中的一个相当重要的环节,也是着力培养学生创新思维能力的一个重要平台。
通过进行这样的教学实践,能从根本上提高学生的动手、动脑以及及时查阅资料和勤奋学习的良好习惯。
通过这样的设计环节,是我们这些本来就学习设计专业的学生更能深刻地体会到自己所学专业的优势和具体的应用方向。
设计过程当中最重要的是准确和可靠。
不但要求设计参数的准确无误,还有设计思路的明朗化和可推广化。
每一个设计人员,都得背着严谨认真,一丝不苟的态度去对待自己亲手设计的题目,这是对广大需求者和消费者的最大的肯定,也于无形中锻炼和激发了我们的责任意识。
更重要的是,本次设计是团体进行的项目,要求小组内部相互协作,相互促进,以便更好,更出色地完成设计任务,强化我们每个人的团队合作意识。
1.3课程设计的具体要求1.严格按照老师的设计要求进行设计,不得擅自做主张偷工减料;2.自己要提出合理的创新思维,并附加到自己设计的具体产品上3.要团队间进行密切的合作与交流;4.确定设计尺寸和具体的参数切合实际,不得随意捏造数据;5.认真对待,按时完成。
1.4该机械的发展前景以及发展趋势随着蔬菜种植技术的广泛应用与推广,越来越多的新的技术要求也在不断地更新。
蔬菜移植机的插苗系统的设计问题就日渐被提到新的议事日程上来。
悬杯式蔬菜移栽机的设计
悬杯式蔬菜移栽机的设计张为政;王君玲;张祖立【摘要】针对吊篮式移栽机在钵苗过高时容易碰苗的问题,设计了悬杯式蔬菜移栽机,阐述了整机的结构及工作原理,并对关键部件进行了具体的结构设计.通过采用水平向后张开的悬杯结构,降低了落苗过程中的伤苗率,提高了整机的栽植质量.【期刊名称】《农机化研究》【年(卷),期】2011(033)008【总页数】3页(P104-106)【关键词】蔬菜移栽机;悬杯式;栽苗器【作者】张为政;王君玲;张祖立【作者单位】沈阳农业大学工程学院,沈阳110866;沈阳农业大学工程学院,沈阳110866;沈阳农业大学工程学院,沈阳110866【正文语种】中文【中图分类】S223.920 引言近年来,随着我国经济结构和农业种植业结构的调整,蔬菜种植面积逐步增加,蔬菜产业在当地的经济收益上占有很大的比重,发展蔬菜生产对提高菜农收入、发展地方经济具有重要意义。
目前,大多数蔬菜生产采用育苗移栽的种植方式。
与传统直播种植方式相比,育苗移栽具有可以提高幼苗的保苗率、使作物生长期提前、提高土地利用率和复种指数的独特优点。
长期以来,蔬菜栽植一直以手工作业为主,劳动强度大,用工量多,难以在较短的适宜栽植期内完成大面积栽植,制约了我国蔬菜生产的发展[1]。
因而,实现移栽作业机械化已成为我国蔬菜种植业迫切需要解决的问题。
吊篮(杯)式移栽机是一种适合于钵体尺寸较大的钵苗栽植机械,可以进行膜上打孔栽植作业。
其优点是钵苗在栽植过程中不受任何冲击,特别适合于根系不太发达而且易碎的钵苗;缺点是结构相对复杂,作业速度较低[2-5]。
研究其工作过程发现,如果移栽的钵苗过高时,吊篮在完成落苗后离开的过程中容易碰苗,造成伤苗,并影响钵苗的直立度。
针对吊篮式移栽机的上述不足,为了更好地保证钵苗的栽植效果,研究设计了悬杯式蔬菜移栽机。
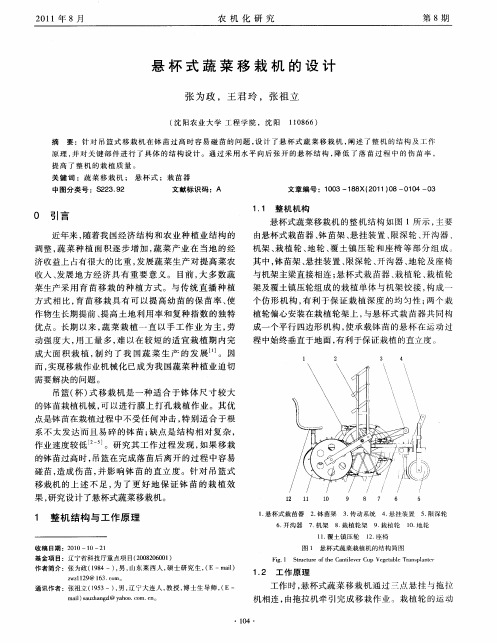
1 整机结构与工作原理1.1 整机机构悬杯式蔬菜移栽机的整机结构如图1所示,主要由悬杯式栽苗器、钵苗架、悬挂装置、限深轮、开沟器、机架、栽植轮、地轮、覆土镇压轮和座椅等部分组成。
悬杯式蔬菜移栽机的设计
个仿 形 机 构 , 利 于 保 证 栽 植 深 度 的均 匀 性 ; 个 栽 有 两
植 轮偏 心 安装 在 栽植 轮架 上 , 悬 杯 式 栽 苗 器 共 同构 与
成一 个 平行 四边 形 机 构 , 承 载 钵 苗 的 悬 杯 在 运 动 过 使 程 中始 终垂 直 于 地 面 , 利 于保 证 栽植 的直立 度 。 有
的钵苗过高时 , 吊篮在完成落苗后离开的过程 中容易
碰苗 , 造成 伤 苗 , 影 响钵 苗 的直 立 度 。针 对 吊篮 式 并 移 栽 机 的上 述 不 足 , 了 更 好 地 保 证 钵 苗 的 栽 植 效 为 果, 研究 设 计 了悬 杯 式蔬 菜 移栽 机 。
l Z U 1 0 9 8 , b b
1 1 整 机机 构 .
悬杯 式 蔬菜 移 栽 机 的 整 机 结 构 如 图 1所 示 , 要 主 由悬 杯 式栽 苗 器 、 苗 架 、 挂 装 置 、 深 轮 、 沟器 、 钵 悬 限 开 机架 、 植 轮 、 轮 、 土 镇 压 轮 和 座 椅 等 部 分 组 成 。 栽 地 覆 其中 , 苗架 、 挂装置 、 钵 悬 限深 轮 、 沟 器 、 轮 及 座 椅 开 地
原 理 , 对 关 键部 件 进 行 了具体 的结 构 设计 。通 过 采 用水 平 向后 张开 的悬 杯 结 构 , 低 了落 苗 过 程 中的 伤 苗 率 , 并 降 提 高 了整 机 的栽 植 质 量 。
关 键 词 :蔬 菜移 栽 机 ; 悬杯 式 ;栽 苗 器
中 图 分 类 号 :¥ 2 .2 2 39 文 献 标 识 码 :A 文章 编 号 :1 0 0 3—1 8 2 1 ) 8— 1 4一 3 8 X( 0 1 0 0 O O
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学士学位毕业设计白菜移栽机的实体设计学生姓名:学号:指导教师:所在学院:专业:中国·大庆白菜移栽机的实体设计摘要在研究国内外插秧机械的发展状况和我国插秧机械存在的问题的基础上,根据白菜移栽作业的要求,设计了一种以步进式植质钵育水稻插秧机为模板的单行作业的白菜移栽机。
该机型在插秧机构的分插秧原理和插秧的运动轨迹等方面作了相应的改进,对分插机构进行重新设计,确定了曲柄、栽植臂和摆杆等部件的结构和运动参数,将针式取秧器改为刀片式便于切取钵块,并对秧箱和移箱机构的改装设计。
分析了刀片式取秧器在取苗、送苗、插苗、回转、避让和回程过程中机器前进速度与速度之间应有的关系,确定出相应的白菜移栽模型。
同时还对开沟和覆土压实装置进行设计,满足白菜移栽的要求。
利用UG对关键的部件进行实体设计,主要的机构包括分插机构、发动机、秧箱、移箱机构、送秧机构、离合器机构、仿形机构以及开沟器和覆土轮等部分进行设计。
最后作出整机的运动仿真过程,为该机型的后续生产提供技术支撑。
该白菜移栽机的特点是结构简单,操作容易,工效高。
白菜苗在移栽过程中,直立度和成活率高。
在结构设计方面也有一些的创新之处,待到实际生产中进行验证。
关键词白菜移栽机;植质钵育;分插机构;实体设计AbstratPlanting at home and abroad in the development of machinery and mechanical planting of our problems, based on the transplanting operation in accordance with the requirements of Chinese cabbage, in order to design a step-by-step quality-sik sterile rice transplanter bowl as a template for one-way operations cabbage Transplanter. The model sub-agencies in the planting and transplanting seedlings principle and so the trajectories of the corresponding improvements to the re-planting mechanisms designed to determine the crank arm and put under cultivation, such as parts of the structure and motion parameters, the needle browser-style changed from seedling to facilitate blade bowl cut block, and move boxes and boxes seedling body design modifications. Analysis of the blade from seedlings seedlings in check, sent to Miller,play, turn, avoid the process and return the machine forward speed and the relationship between the speed, to determine the appropriate model of cabbage transplanting. At the same time also trenching and soil compaction device designed to meet the requirements of Chinese cabbage transplanting.The use of UG key components of physical design, the main institutions, including the drop, the engine, seedling boxes, move me body, give seedlings agencies, the clutch body, profiling agencies, as well as trenching and soil and other parts of the design wheel. Finally, the motion simulation of machine to make the process of follow-up of the production models to provide technical support.The cabbage transplanting machine is characterized by simple structure, easy operation, high work efficiency. Chinese cabbage seedlings in the transplant process, the vertical and the high survival rate. In structural design has also been a number of innovations, stay to verify the actual production.Key words:Cabbage Transplanter: Drop: The shift box: The overall structure目录摘要 (I)ABSTRAT (II)前言................................................ - 1 - 1 概述.............................................. - 3 -1.1课题研究的目的 (3)1.2国内外插秧机机械发展现状 (3)1.2.1日本插秧机械现状 .............................. - 3 - 1.2.2韩国插秧机械现状 .............................. - 4 - 1.3国内插秧机械现状、发展及存在的问题. (4)1.3.1 国内插秧机械现状.............................. - 4 - 1.3.2 国内插秧机械存在的问题........................ - 5 - 1.4国内外移栽机械的发展状况和特点.. (5)1.4.1国外移栽机械的种类形式是和特点 ................ - 5 - 1.4.2国内移栽机械的种类形式和特点 .................. - 8 - 1.5手扶式白菜移栽机的研究和发展. (9)1.6手扶式插秧机涉及内容和方法 (9)2 白菜移栽机的总体设计............................. - 10 -2.1白菜移栽机的三维实体结构设计图 (10)2.2工作过程 (11)2.3白菜移栽机的技术规格 (11)2.4配套秧盘的设计 (12)3 分插秧原理与分插机构的设计....................... - 15 -3.1分插机构组成 (15)3.2分插工作原理 (16)3.3秧爪 (17)3.4曲柄连杆的设计 (19)4 秧箱、送秧机构和移秧机构的设计................... - 21 -4.1秧箱 (21)4.1.1组成及工作原理 ............................... - 21 - 4.1.2设计内容、步骤及结果 ......................... - 21 - 4.2送秧机构.. (22)4.2.1 组成及工作原理............................... - 22 -4.2.2设计要求 ..................................... - 23 - 4.2.3设计内容、步骤及结果 ......................... - 23 - 4.3移箱机构.. (24)5其他部分的设计 ................................... - 26 -5.1插秧机的动力配备 (26)5.2开沟器 (27)5.3驱动轮 (28)5.4安全离合器机构 (29)5.5覆土压实装置 (29)总结............................................... - 31 -结束语............................................. - 32 -致谢............................................... - 33 -参考文献........................................... - 34 -附录............................................... - 35 -前言作物栽植可以避免苗期干旱、冻害等自然灾害;提高复种指数,解决多茬作物的接茬矛盾,大幅度提高作物产量。
我国旱地作物栽植的面积相当大,每年旱地栽植的面积超过1500万公顷。
但目前我国主要采用手工来完成移栽作业,存在劳动强度大、作业效率低、移栽质量差等问题。
国外发达国家已实现了从育苗到移栽的机械化作业,有效的提高了幼苗的质量和劳动生产率。
因此,实现旱地栽植机械化已成为我国农业生产的迫切需要。
同时作物育苗移栽,不但能增加有效积温、延长生长期、保证按时成熟,而且移栽的作物根系发达、茎秆粗壮、成熟一致、抗倒伏、产量高。
此外,作物移栽还能节省种子。
种苗栽植从劳动强度方面来看,是仅次于收获作业的一项劳动强度非常大的农事活动,它约占作物从种到收所需劳动量的20%。
显而易见,实现旱地移栽机械化已成为农业生产的迫切需要。
大白菜,又称为“结球白菜”、“黄芽菜”或“窝心白菜”等,是我国的原产和特产蔬菜,全国各地普遍栽培,以华北地区为主要产区。
大白菜以其细嫩甘脆、汁白如乳的品质,易种植、耐储藏的特性,在我国的蔬菜生产和消费中占有重要的地位,是人们秋冬季节餐桌上的美味佳蔬。
在北方,大白菜被称为“当家菜”、“半年菜”,现已先后引种世界各地。