悬杯式蔬菜移栽机设计
旱地蔬菜移栽机移栽机构设计与试验
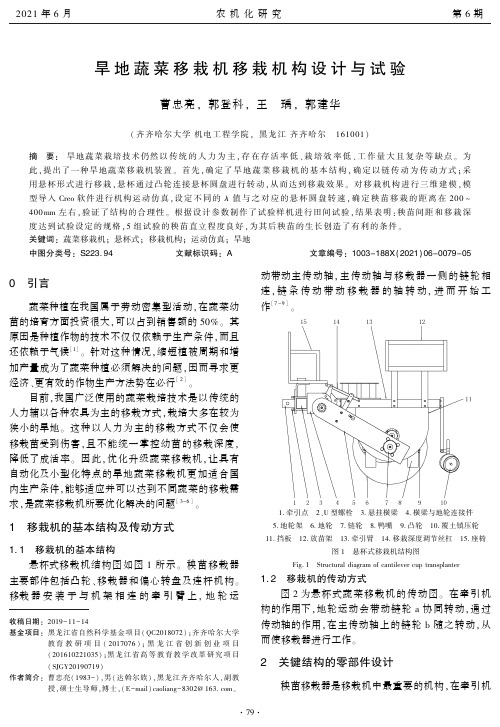
旱地蔬菜移栽机移栽机构设计与试验曹忠亮,郭登科,王㊀瑀,郭建华(齐齐哈尔大学机电工程学院,黑龙江齐齐哈尔㊀161001)摘㊀要:旱地蔬菜栽培技术仍然以传统的人力为主,存在存活率低㊁栽培效率低㊁工作量大且复杂等缺点㊂为此,提出了一种旱地蔬菜移栽机装置㊂首先,确定了旱地蔬菜移栽机的基本结构,确定以链传动为传动方式;采用悬杯形式进行移栽,悬杯通过凸轮连接悬杯圆盘进行转动,从而达到移栽效果㊂对移栽机构进行三维建模,模型导入Creo软件进行机构运动仿真,设定不同的λ值与之对应的悬杯圆盘转速,确定秧苗移栽的距离在200~ 400mm左右,验证了结构的合理性㊂根据设计参数制作了试验样机进行田间试验,结果表明:秧苗间距和移栽深度达到试验设定的规格,5组试验的秧苗直立程度良好,为其后秧苗的生长创造了有利的条件㊂关键词:蔬菜移栽机;悬杯式;移栽机构;运动仿真;旱地中图分类号:S223.94㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2021)06-0079-050㊀引言蔬菜种植在我国属于劳动密集型活动,在蔬菜幼苗的培育方面投资很大,可以占到销售额的50%㊂其原因是种植作物的技术不仅仅依赖于生产条件,而且还依赖于气候[1]㊂针对这种情况,缩短植被周期和增加产量成为了蔬菜种植必须解决的问题,因而寻求更经济㊁更有效的作物生产方法势在必行[2]㊂目前,我国广泛使用的蔬菜栽培技术是以传统的人力辅以各种农具为主的移栽方式,栽培大多在较为狭小的旱地㊂这种以人力为主的移栽方式不仅会使移栽苗受到伤害,且不能统一掌控幼苗的移栽深度,降低了成活率㊂因此,优化升级蔬菜移栽机,让具有自动化及小型化特点的旱地蔬菜移栽机更加适合国内生产条件,能够适应并可以达到不同蔬菜的移栽需求,是蔬菜移栽机所要优化解决的问题[3-6]㊂1㊀移栽机的基本结构及传动方式1.1㊀移栽机的基本结构悬杯式移栽机结构图如图1所示㊂秧苗移栽器主要部件包括凸轮㊁移栽器和偏心转盘及连杆机构㊂移栽器安装于与机架相连的牵引臂上,地轮运收稿日期:2019-11-14基金项目:黑龙江省自然科学基金项目(QC2018072);齐齐哈尔大学教育教研项目(2017076);黑龙江省创新创业项目(201610221035);黑龙江省高等教育教学改革研究项目(SJGY20190719)作者简介:曹忠亮(1983-),男(达斡尔族),黑龙江齐齐哈尔人,副教授,硕士生导师,博士,(E-mail)caoliang-8302@㊂动带动主传动轴,主传动轴与移栽器一侧的链轮相连,链条传动带动移栽器的轴转动,进而开始工作[7-9]㊂1.牵引点㊀2㊁U型螺栓㊀3.悬挂横梁㊀4.横梁与地轮连接件5.地轮架㊀6.地轮㊀7.链轮㊀8.鸭嘴㊀9.凸轮㊀10.覆土镇压轮11.挡板㊀12.放苗架㊀13.牵引臂㊀14.移栽深度调节丝杠㊀15.座椅图1㊀悬杯式移栽机结构图Fig.1㊀Structural diagram of cantilever cup transplanter1.2㊀移栽机的传动方式图2为悬杯式蔬菜移栽机的传动图㊂在牵引机构的作用下,地轮运动会带动链轮a协同转动,通过传动轴的作用,在主传动轴上的链轮b随之转动,从而使移栽器进行工作㊂2㊀关键结构的零部件设计秧苗移栽器是移栽机中最重要的机构,在牵引机2021年6月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第6期构及链传动的作用下,移栽器会做循环圆周运动㊂移栽器与主动圆盘和从动圆盘组成了多杆机构的曲柄,与圆盘共同做圆周运动㊂当悬杯运动到最高点时,秧苗放入悬杯中;随着圆盘的转动,悬杯运动到离地面最近的时候,悬杯末端的鸭嘴在凸轮的作用下将秧苗投放到悬杯打好的孔中,插秧完成;完成插秧后,鸭嘴在自身弹簧的作用下合并,悬杯再次运动到最高点时,完成1个工作周期㊂蔬菜移栽器工作示意图如图3所示㊂1.地轮㊀2.移栽器㊀3.链轮组a㊀4.链条㊀5.主传动轴㊀6.链轮组b图2㊀蔬菜移栽机传动图Fig.2㊀Drive Chart of Vegetable Transplanter1.牵引机架㊀2.偏心导轨㊀3.链轮㊀4.悬杯5.凸轮㊀6.主动圆盘㊀7.从动圆盘图3㊀蔬菜移栽器工作示意图Fig.3㊀Working schematic diagram of vegetable transplanter2.1㊀悬杯的设计悬杯的运动由两个运动合成:一是动力装置带动移栽机前进或后退的线性运动,另一个是悬杯随着圆盘所做的圆周运动㊂悬杯的运动轨迹如图4所示㊂当选取悬杯的主动圆盘的圆心为零点,建立直角坐标系,得出悬杯在X㊁Y方向上的运动方程为X=V车t+R盘cosωt(1)Y=-R盘sinωt(2)式中㊀V车 拖拽设备的行驶速度;㊀R盘 悬杯圆盘的半径;㊀ω 悬杯圆盘的角速度;㊀t 悬杯运动的时间㊂令λ=R盘ωV车,可以得出:当λ>1时,悬杯的运动轨迹为Ⅰ;当λ=1时,悬杯的运动轨迹为Ⅱ;当λ>1时,悬杯的运动轨迹为Ⅲ㊂当悬杯随着圆盘运动到A 点时,悬杯在凸轮的作用下鸭嘴被打开,当鸭嘴打开的角度变得最大时,悬杯离地面最近;此时,悬杯位于图像B点,完成插秧后,悬杯上升,鸭嘴随之关闭㊂所以,当λ>1时,为最佳投苗时间的选择范围㊂图4㊀悬杯的运动轨迹Fig.4㊀Motion analysis of cantilever cup确定了悬杯的运动轨迹后,则V车=f60㊃S(3)式中㊀f 蔬菜的移栽频率;㊀S 秧苗之间的距离㊂令f=60株/min(蔬菜的种植频率可取为40~70株/min),秧苗之间的距离S与频率f成正比关系㊂当λ>1时,由λ=R盘ω/V车可以得出R盘ω/V车>1(4)此时,把式(3)带入式(4)中,得N<2πR盘/S(5)式中㊀N 悬杯的个数㊂悬杯圆盘半径取R=200mm,悬杯个数N与秧苗与秧苗之间的距离S的关系如表1所示㊂表1㊀极限悬杯数量与秧苗间距的关系Table4㊀Relationship between limit cup number and seedling spacing秧苗间距/mm悬杯数量/个秧苗间距/mm悬杯数量/个20063004400350026002㊀㊀市面上流通的蔬菜在进行移栽时秧苗之间的距2021年6月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第6期离大多在300~400mm之间,定义悬杯圆盘半径R= 200mm,通过表3与表4可知,圆盘上的悬杯个数为3个最为合理㊂2.2㊀传动比计算移栽机的总传动比为i 总=ωω地=2πR地NS(6)式中㊀i总 移栽机的总传动比㊂由式(6)可以看出:悬杯个数N和地轮半径R地之间的关系㊂给定地轮半径R地=305mm,为了适应不同蔬菜的移栽要求,使秧苗之间的距离为200~400mm,带入式(6)得到移栽机的总传动比的取值范围为1.597~3.192㊂移栽机为二级传动链轮,所以移栽机的总传动比的另一种表示形式为i 总=Z地Z aˑZ bZ盘(7)式中㊀Z地 地轮所用链轮的齿数;㊀Z盘 与圆盘相连的齿轮齿数;㊀Z a 与Z地链传动的齿轮齿数;㊀Z b 与圆盘齿轮链传动齿轮齿数㊂Z a与Z b在同一传动轴上,可以得到秧苗间的距离为S=2πR地Ni总(8)式中㊀R地 地轮半径;对于小型自动化的移栽机而言,齿轮的大小要适合机器本身要求,所以确定Z地=23齿,Z a=17齿,Z b =27齿,Z盘=23齿,则i23=2317ˑ2723=1.588(9)S23=2πˑ3053ˑ1.588=402mm(10)由式(9)和式(10)可知:当齿轮的齿数为23齿时,总传动比为i23=1.588,秧苗之间的距离为S23= 402mm㊂3㊀移栽机构运动仿真在SoildWorks中建立好三维模型后,导入Creo中进行运动仿真㊂在Creo中对各个独立的零件添加运动副和约束,目的是为了验证所设计的移栽机构能否达到预期的运动目标㊂图5为移栽机构的仿真约束图㊂图5㊀移栽机构仿真约束图Fig.5㊀Simulation constraint diagram of transplanting mechanism当λ<1(λ=0.5)时,悬杯的运动轨迹如图6所示;当λ=1时,悬杯的运动轨迹如图7所示;当λ> 1(λ=1.6)时,悬杯的运动轨迹如图8所示㊂图6㊀λ<1时悬杯的运动轨迹Fig.6㊀The trajectory of the suspension cup whenλ<1图7㊀λ=1时悬杯的运动轨迹Fig.7㊀The trajectory of the suspension cup whenλ=1图8㊀λ>1时悬杯的运动轨迹Fig.8㊀The trajectory of the suspension cup whenλ>1当λ=1时,悬杯投放完秧苗后,秧苗在一瞬间是不能进入打好的孔中,而是有一个下落的过程;当λ<1时,悬杯在插秧的过程中不能完成1个完整的插秧动作,因而也不是最佳选择;只有当λ>1时,悬杯的运动轨迹才符合蔬菜移栽的要求㊂λ>1时悬杯的运动仿真图如图9~图11所示㊂移栽前进方向的位移分量随时时间变化如图9所示㊂移栽前进方向的速度分量随时时间变化如图10所示㊂移栽前进方向的加速度分量随时时间变化如图11所示㊂图9㊀λ>1时悬杯的位移Fig.9㊀Displacement of the suspension cup Whenλ>1图10㊀λ>1时悬杯的速度Fig.10㊀The velocity of the suspension cup whenλ>1图11㊀λ>1时悬杯的加速度Fig.11㊀Acceleration of the suspension cup in whenλ>1保证移栽秧苗的直立度是蔬菜种植的基本要求㊂通过移栽机构的运动仿真图分析并根据 零速投苗 [10]原理可知:当λ>1时,速度在水平方向上的矢量才会出现零点㊂因此,λ>1是移栽机正常工作的必要条件㊂移栽机的总传动比计算公式为i 总=ωω地=2πR地NS(3-1)式中㊀ω地 地轮的角速度㊂秧苗间距㊁传动比㊁λ之间的关系如表2所示㊂由表2可以看出:只有当株距小于400mm时,λ>1㊂所以,可以得出总传动比的取值范围是在1.596~3.192之间㊂由此确定能够实现的蔬菜移栽范围是200~400mm㊂表2㊀秧苗间距㊁传动比㊁λ之间的关系Table2㊀Relationships among seedling spacing,transmission ratio andλ秧苗间距/mm传动比λ200 3.192 2.128250 2.554 1.703续表2秧苗间距/mm传动比λ300 2.128 1.418350 1.824 1.216400 1.596 1.0634㊀试验4.1㊀试验装置及条件为了验证悬杯式蔬菜移栽机机构设计的正确性,进行了移栽机送苗装置运行试验,在分布均匀的田间土壤上进行西兰花幼苗的移栽试验㊂相关参数如表3所示㊂表3㊀移栽机的主要设计参数Table3㊀Main design parameters of transplanter参数项目单位数据移栽机尺寸(长ˑ宽ˑ高)mm1445ˑ1478ˑ1245移栽机行驶速度m/s0.3种植行数2钩挂形式三点悬挂动力需求kW18或18以上行距mm400秧苗间距离规格mm320移栽深度mm404.2㊀试验分析以表3设定的相关数据作为试验参数,进行田间试验,得出数据如表4所示㊂由表4可知:秧苗间距和移栽深度达到试验设定的规格,5组试验的秧苗直立程度良好,为其后秧苗的生长创造了有利条件㊂表4㊀蔬菜移栽机实验数据记录Table4㊀Experimental data record of vegetable transplanter 组次试验秧苗株数试验数据平均秧苗间距/mm直立合格率/%平均移栽深度/mm 1100322.69541.42100318.59338.53100320.89740.74100318.29439.25100317.59440.95㊀结论设计了一种蔬菜移栽机,采用悬杯式移栽机构㊂通过运动仿真分析得知:当λ>1时,悬杯运动到最低点,悬杯运动的速度在水平方向上的瞬时速度矢量与地面的相对速度为零,即 零速投苗 ㊂试验结果表明:秧苗被平稳地插入土壤中,并获得了优良的直立度,两株秧苗移栽的距离在200~400mm,为其后秧苗的生长创造了有利的条件㊂移栽机构具有良好的工作可靠性和适应性,能够达到一般蔬菜的移栽要求㊂参考文献:[1]㊀冯时佳,谢俊,朱伟,马履中.秧苗移栽机器人的运动控制研究[J].机械设计与制造,2008(3):166-168. [2]㊀汤修映,侯书林,朱玉龙,等.油菜移栽机械化技术研究进展[J].农机化研究,2010,32(4):224-227.[3]㊀谢俊,尹小琴,马履中,等.基于多轴运动控制器的三自由度并联秧苗移栽机器人的研究[J].机械科学与技术, 2011,30(2):336-339,344.[4]㊀潘启明.国内外移栽机技术现状与发展趋势[J].安徽农业科学,2013,41(31):12478-12479.[5]㊀于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J].农业机械学报,2014(8):44-53.[6]㊀汤修映,侯书林,朱玉龙.等.油菜移栽机械化技术研究进展[J].农机化研究,2010,32(4):224-227. [7]㊀杨华,韩宏宇,窦钰程,等.我国旱地移栽机械的现状及发展建议[J].农机使用与维修,2012(3):32-33. [8]㊀王君玲,高玉芝,李成华.旱地钵苗移栽机械化生产的现状及发展趋势[J].农业机械化与电气化,2003(5):5-6.[9]㊀BIOTECHNOLOGY.Research conducted at university of pisahas provided new information about Biotechnology(A field vegetable transplanter for use in both tilled and no-till soils)[J].Biotech week,2019,62(3):593-602. [10]㊀张荣毅,张祖立,翟殿波,等.悬杯式蔬菜移栽机栽植单体的数字化设计[J].农机化研究,2013,35(5):107-110,118.Design and Motion Simulation of Key Parts ofVegetable Transplanter in DrylandCao Zhongliang,Guo Dengke,Wang Yu,Guo Jianhua(School of Mechatronics Engineering,Qiqihaer University,Qiqihar161001,China) Abstract:Dryland vegetable cultivation techniques are still dominated by traditional manpower,and have shortcomings such as low survival rate,low cultivation efficiency,large workload and complexity.Based on the above problems,this paper proposes a dryland vegetable transplanting device.Firstly,the basic structure of the dryland vegetable transplanting machine was determined.The design of the chain transmission was determined.The transplanting mechanism was trans-planted in the form of a hanging cup.The hanging cup was rotated by the cam to connect the hanging cup disc to achieve the transplanting effect.The three-dimensional software is used to carry out three-dimensional modeling of the transplan-ting mechanism.The model is imported into Creo software for mechanism motion simulation,and differentλvalues corre-sponding to the hanging cup disk rotation speed are set,so that the distance of seedling transplanting is determined to be 200mm~400mm.Left and right,verified the rationality of the structure.The test samples were made according to the design parameters for field experiment.The results showed that the seedling spacing and transplanting depth reached the specifications set by the experiment.The seedlings of the five groups were well-erected,which created favorable condi-tions for the growth of the seedlings.Key words:vegetable transplanter;cantilever cup;transplanting mechanism;motion simulation;dryland。
牵引式小型钵体蔬菜移栽机的设计

牵引式小型钵体蔬菜移栽机的设计范修文;张云秀;童飞特;李传峰【期刊名称】《农机化研究》【年(卷),期】2014(000)010【摘要】针对我国蔬菜移栽行业发展的现状和现有蔬菜移栽机存的投苗率低、伤苗率高及设备庞大等问题,设计开发了牵引式小型钵体蔬菜移栽机。
该机型能满足农户的需求,提高作业效率,苗钵通用性强,并且移栽后行距、株距和直立度等性能良好。
该小型蔬菜移栽机采用吊篮及鸭嘴装置移栽苗体,人工投苗,实现半自动移栽。
该蔬菜移栽机在已经耕整过的土地上作业,无需开沟器,机型小巧灵活,设计结构合理,可实现多种蔬菜的移栽,为我国农作物移栽提供了技术支持。
%Taking into account the present situations of the vegetable transplantation , the machine issues such as low see-ding rate , high seedling injury rate , large volume of the machine , this paper is aimed to design and develop small-type tractor bowl transplanter , which can meet the need of farmers , improve the operation efficiency , possess high versatility of seed bowl , and the seeds show acceptable line spacing , vertical spacing and so on .It will transplant seeds by suspen-ded basket and duckbill device , together with artificial seeding , which marks the semi-automatic transplantation .In terms of the components, it consists of assembly of traction frames , ground wheels, transplanters ,seed racks, gratifying-ly , it has been operated on the prepared soils without furrow opener , because of the compact and flexible design , reason-ablestructure , it can transplant a variety of vegetables , supporting crop transplantation at home technically .【总页数】4页(P131-134)【作者】范修文;张云秀;童飞特;李传峰【作者单位】塔里木大学机械电气化工程学院/现代农业工程重点实验室,新疆阿拉尔 843300;天津职业大学,天津 300402;塔里木大学机械电气化工程学院/现代农业工程重点实验室,新疆阿拉尔 843300;塔里木大学机械电气化工程学院/现代农业工程重点实验室,新疆阿拉尔 843300【正文语种】中文【中图分类】S223.94【相关文献】1.蔬菜钵苗移栽机创新设计 [J], 赵金广2.非圆齿轮-连杆组合传动式蔬菜钵苗移栽机构设计 [J], 孙良;沈嘉豪;周誉株;叶治政;俞高红;武传宇3.探出式蔬菜钵苗打孔移栽机构优化设计与试验 [J], 周脉乐; 薛向磊; 钱孟波; 尹大庆4.2ZYM-2型蔬菜钵苗移栽机设计与试验 [J], 金鑫;程群;赵博;姬江涛;李明勇5.2ZYM-2型蔬菜钵苗移栽机设计与试验 [J], 金鑫;程群;赵博;姬江涛;李明勇因版权原因,仅展示原文概要,查看原文内容请购买。
大棚蔬菜移栽机的设计

大棚蔬菜移栽机的设计郭德伟;李丽;俞利宾;闵洁;张文斌【摘要】Focusing on the current common vegetable transplanting machine is difficult to use in the limited space of greenhouse , which causes the greenhouse vegetables in during seeding transplanting still rely on artificial .Due to the time consuming and laborious situation , a new greenhouse vegetable transplanting machine is specially designed for the greenhouse .The device is promoting transplanting machine when walking , and driving wheel to rotate through the gear and sprocket two stages gearing up .Then the power is transmitted to the implementing agencies and actuator drives the seeding device and seeding transmission device to plant seeding .This device adopts eccentric mechanism to realize duck mouth shape plug seeding device in the up and down movement , and transferred seeding device cycle intermittent motion is realized in the space of Geneva mechanism .Then the predetermined motion law is achieved by the coordinated action of space of Geneva mechanism with the eccentric wheel mechanism .According to the parameters of the greenhouse , the size of the design of each component is determined , and the CAD and 3 D structure are made .On the above bases , the final design of greenhouse vegetables transplanting machine is completed .%针对目前常见的蔬菜移栽机很难在空间受限的大棚中使用,导致大棚蔬菜在进行育苗移栽时仍然依靠人工而费时费力的现状,设计了一种专门针对大棚使用的蔬菜移栽机。
小型蔬菜移栽机的研究与设计

学士学位毕业设计小型蔬菜移栽机的研究与设计***名:***学号:***************师:**所在学院:工程学院专业:机械设计制造及其自动化中国·大庆2012年4月蔬菜移栽机的研究与设计目录摘要 (1)1前言 (6)2移栽机械的国内外现状 (8)3 设计方案的选择 (8)3.1钳夹式移栽机 (8)3.2链夹式栽植机 (9)3.3 挠性圆盘移栽机 (10)3.4 吊篮式移栽机 (10)3.5 导苗管式移栽机 (12)3.6带式栽植机 (19)4 机具的机构特点 (20)4.1整机机构特点 (20)4.2主要技术参数 (21)4.3主要工作部件的结构特点及作用 (21)4.3.1 地轮 (21)4.3.2 开沟器 (22)14.3.3 镇压轮 (22)4.3.4 覆土器 (22)4.4设计蔬菜移栽机械的原理 (23)4.4.1 零速原理 (23)4.4.2 栽植机械的结构设计 (23)5 地轮轴的校核 (26)6 设计时间的安排 (31)7 结论和总结 (32)8致谢词 (32)9 主要参考文献、资料 (34)10 附录一 (36)2摘要移栽是蔬菜生产过程中的一个重要环节,具有对气候补偿和使作物生育提早的综合效益。
它可以充分利用光热资源,其经济效益和社会效益均非常可观。
但目前移栽过程采用人工移栽,劳动强度大、作业效率低,难以实现大面积栽植制约了生产规模,影响了生产效益,同时也限制了蔬菜生产的发展空间。
目前国内对移栽机械的研究和开发基本属于仿造,没有对国外的移栽机进行重大的改进和技术上的突破,而且国外移栽机结构复杂,价格昂贵,在国内推广难度很大。
因此设计一种新型的移栽机械已成为我国蔬菜种植业发展的迫切需求。
本文在总结吸收了国内外各种移栽机的优缺点和实验室已有研究成果的基础上,基于一种钵苗移栽机构——杠杆顶出式机构,设计了蔬菜钵苗移栽机。
该机的特点有:结构简单,工作可靠;易保证株距的均匀性;能实现开沟、施肥、移栽和覆土等工序。
悬杯式移栽机栽植系统的优化设计与运动仿真

农 机 化 研究
第9期
悬 杯 式 移栽 机 栽 植 系 统的 优 化 设 计 与 运动 仿 真
刘
1 1 1 2 印 ,王 君 玲 , 张祖 立 , 张 校 通
( 1 . 沈 阳 农 业大 学 工 程ห้องสมุดไป่ตู้学院 , 沈 阳 摘
11086 6 ; 2. 东 北 大 学 机械 工 程 与 自动 化 学 院 ,沈 阳
1 栽 植机构的 工作原理
悬杯式栽 植机 构的 主 要部 件有 栽 植轮 和 栽植 器 ( 主要包括悬杯 � 连杆 � 凸轮机构 � 弹簧 ) 等, 结构如图 1 所示 � 工作时 , 地轮通过传动系统驱动栽植轮转动 , 悬杯 始终与地面保持垂 直, 并 随栽植轮转动 ; 当悬杯 转到 上面 时, 由 人 工将 钵 苗 投入 悬 杯中 , 当 栽植 轮 转 到
0
引言
预定位置 时, 凸 轮也随之转到回 程位置, 连杆受到弹 簧的拉力 向后推动悬杯, 悬杯水 平打开, 向后推动钵 苗至开沟器开出的沟内 ; 然后覆土 � 镇压, 完成栽植过 程 � 悬杯离开钵苗 后, 在凸轮的 作用下慢 慢闭 合, 等 待下一次喂苗�
移栽机的核心部件 是栽植机 构, 是保证 秧苗栽 植 质量� 提高 工作效率的重要 部件 , 它反映了移栽 机的 发展过程和进步 水平 � 本文研 究一种新 型悬杯式 移 栽机的栽植机构作为栽植系统的研究基础 , 针对其在 进行移栽作业时存在的一些问题 , 如移栽质量不稳定 和钵苗直立度不能完全达到农业技术要求等, 对栽植 机构进行分析和改进, 以寻求最优的结构形式和工作 参数 � 本文建立栽植机构 的数学模 型, 确定投 苗速度 作 为栽植质量评价的目标函数, 根据栽植系统的工作参 l ab 软件的优化 数和结构形式建立约束条件 , 利用 M at 工具求解问题的最优解� 通过计算机辅助分析方法 , 对栽植机构进行 了运动仿真分析 , 求 解运动学参数 , 即悬杯的运动轨迹 � 运动 速度和加速度 , 用以评 价悬 杯式移栽机的作业性能�
悬杯式蔬菜移栽机的设计
悬杯式蔬菜移栽机的设计张为政;王君玲;张祖立【摘要】针对吊篮式移栽机在钵苗过高时容易碰苗的问题,设计了悬杯式蔬菜移栽机,阐述了整机的结构及工作原理,并对关键部件进行了具体的结构设计.通过采用水平向后张开的悬杯结构,降低了落苗过程中的伤苗率,提高了整机的栽植质量.【期刊名称】《农机化研究》【年(卷),期】2011(033)008【总页数】3页(P104-106)【关键词】蔬菜移栽机;悬杯式;栽苗器【作者】张为政;王君玲;张祖立【作者单位】沈阳农业大学工程学院,沈阳110866;沈阳农业大学工程学院,沈阳110866;沈阳农业大学工程学院,沈阳110866【正文语种】中文【中图分类】S223.920 引言近年来,随着我国经济结构和农业种植业结构的调整,蔬菜种植面积逐步增加,蔬菜产业在当地的经济收益上占有很大的比重,发展蔬菜生产对提高菜农收入、发展地方经济具有重要意义。
目前,大多数蔬菜生产采用育苗移栽的种植方式。
与传统直播种植方式相比,育苗移栽具有可以提高幼苗的保苗率、使作物生长期提前、提高土地利用率和复种指数的独特优点。
长期以来,蔬菜栽植一直以手工作业为主,劳动强度大,用工量多,难以在较短的适宜栽植期内完成大面积栽植,制约了我国蔬菜生产的发展[1]。
因而,实现移栽作业机械化已成为我国蔬菜种植业迫切需要解决的问题。
吊篮(杯)式移栽机是一种适合于钵体尺寸较大的钵苗栽植机械,可以进行膜上打孔栽植作业。
其优点是钵苗在栽植过程中不受任何冲击,特别适合于根系不太发达而且易碎的钵苗;缺点是结构相对复杂,作业速度较低[2-5]。
研究其工作过程发现,如果移栽的钵苗过高时,吊篮在完成落苗后离开的过程中容易碰苗,造成伤苗,并影响钵苗的直立度。
针对吊篮式移栽机的上述不足,为了更好地保证钵苗的栽植效果,研究设计了悬杯式蔬菜移栽机。
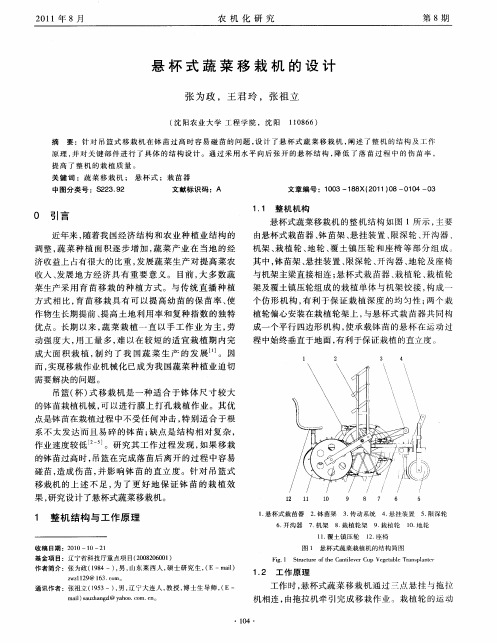
1 整机结构与工作原理1.1 整机机构悬杯式蔬菜移栽机的整机结构如图1所示,主要由悬杯式栽苗器、钵苗架、悬挂装置、限深轮、开沟器、机架、栽植轮、地轮、覆土镇压轮和座椅等部分组成。
悬杯式蔬菜移栽机的设计
个仿 形 机 构 , 利 于 保 证 栽 植 深 度 的均 匀 性 ; 个 栽 有 两
植 轮偏 心 安装 在 栽植 轮架 上 , 悬 杯 式 栽 苗 器 共 同构 与
成一 个 平行 四边 形 机 构 , 承 载 钵 苗 的 悬 杯 在 运 动 过 使 程 中始 终垂 直 于 地 面 , 利 于保 证 栽植 的直立 度 。 有
的钵苗过高时 , 吊篮在完成落苗后离开的过程 中容易
碰苗 , 造成 伤 苗 , 影 响钵 苗 的直 立 度 。针 对 吊篮 式 并 移 栽 机 的上 述 不 足 , 了 更 好 地 保 证 钵 苗 的 栽 植 效 为 果, 研究 设 计 了悬 杯 式蔬 菜 移栽 机 。
l Z U 1 0 9 8 , b b
1 1 整 机机 构 .
悬杯 式 蔬菜 移 栽 机 的 整 机 结 构 如 图 1所 示 , 要 主 由悬 杯 式栽 苗 器 、 苗 架 、 挂 装 置 、 深 轮 、 沟器 、 钵 悬 限 开 机架 、 植 轮 、 轮 、 土 镇 压 轮 和 座 椅 等 部 分 组 成 。 栽 地 覆 其中 , 苗架 、 挂装置 、 钵 悬 限深 轮 、 沟 器 、 轮 及 座 椅 开 地
原 理 , 对 关 键部 件 进 行 了具体 的结 构 设计 。通 过 采 用水 平 向后 张开 的悬 杯 结 构 , 低 了落 苗 过 程 中的 伤 苗 率 , 并 降 提 高 了整 机 的栽 植 质 量 。
关 键 词 :蔬 菜移 栽 机 ; 悬杯 式 ;栽 苗 器
中 图 分 类 号 :¥ 2 .2 2 39 文 献 标 识 码 :A 文章 编 号 :1 0 0 3—1 8 2 1 ) 8— 1 4一 3 8 X( 0 1 0 0 O O
2MZ-2型悬挂式铺膜覆土钵苗移栽机的研制

通过更换栽植器盘上鸭嘴杯的数量及调节传动链和
驱动 轮侧链 轮 的数 量 比而调 节行 距 ;通过 调节 安装 在底 盘横 梁上 的移 栽单 元 的间距 实现 株距 的调 节 。 ( )一 机 多 用 , 以一 次 性 完 成 铺 膜 、 滴 灌 3 可 下 带 、 苗移 栽 等作 业 ; 可 以 拆下 铺 膜 装 置 , 已经 钵 也 在 铺好 膜 的 田地 里进 行移 栽 、 覆土 作业 。 ( ) 机可 移栽 多种 根部 带有 基质 ( 块 ) 4 该 土 的植
长期 , 提早成熟 , 增加单位面积产量 , 避过低温霜期 , 提高抗旱抗灾能力等优点。近年来移栽机械随着育 苗移栽技术的推广和研制而发展起来 。在我国特别
是 在 农 业 资 源 特 别 丰 富 的新 疆 农 业 区和 东 北 农 业
本机适宜于在耕整后的田地上进行栽植工作 ,
由拖 拉机 悬挂 牵引 , 工作 前 , 将所需 宽 度 的塑料 薄 先 膜装 在支 膜杆上 , 后将滴 灌 带装在 支架 上 。 具工 然 机 作 时 , 过 推 土板 和镇 压 滚筒 推 开 干 土 、 压 地 表 。 通 镇
型铺膜覆 土钵 苗移 栽 机 。移 栽机 采用 半 自动人 工投
苗 的悬挂 式 结构 。
人到投苗转盘 , 投苗转盘有六个苗杯 , 以一定速度旋 转 ,栽植器上的鸭嘴随着驱动轮传来的动力作圆周 运动 , 当一棵钵苗转至导苗筒时 , 投苗转盘上的投苗 杯张 口, 钵苗掉进导苗筒 , 此时栽植器的鸭嘴也转到 顶部 , 接住从导苗筒导出的钵苗 , 并随栽植器旋转至
工膜 上移 栽 种 植 , 这种 方 式用 工 多 , 动 强度 大 , 劳 生
开沟 圆盘调整到塑料薄膜两边适宜位置进行开沟 , 滴灌带和塑料薄膜通过展膜辊铺设在地面上 ,由压
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文)通过答辩目录摘要 (1)Abstract (2)前言 (3)1 蔬菜移栽机的研究发展 (3)1.1国外移栽机械的研究概况 (3)1.2国内移栽机械的研究概况 (3)1.3移栽机械的主要类型 (4)1.4移栽机械研究存在的问题及发展趋势 (9)1.4.1移栽机械研究存在的问题 (9)1.4.2移栽机械研究的发展趋势 (9)2 悬杯式蔬菜移栽机的工作机理 (10)2.1栽苗器整体的运动轨迹分析 (10)2.1.1栽苗器整体的运动方程 (10)2.1.2栽苗器的运动轨迹分析 (11)2.2悬杯式蔬菜移栽机的主要特征参数 (12)3悬杯式蔬菜移栽机的结构设计 (14)3.1整机结构与工作过程 (14)3.1.1整机结构 (14)3.1.2整机工作过程 (15)3.1.3性能指标 (15)3.2栽植单体的设计 (16)3.2.1栽植轮 (16)3.2.2悬杯式栽苗器 (18)3.2.3开沟器 (23)3.2.4覆土镇压轮 (23)3.3传动系统 (24)3.4悬挂装置与机架 (25)3.5限深轮 (26)3.6地轮 (27)4结论 (28)参考文献 (29)致谢 (31)11摘要近年来,随着我国经济结构和农业种植业结构的调整,蔬菜种植面积逐步增加,蔬菜产业在当地的经济收益上占有很大的比重。
大多数蔬菜品种都采用育苗移栽的方式种植,而我国蔬菜移栽机械发展缓慢,长期以来蔬菜移栽一直以手工作业为主,制约了我国蔬菜产业的发展。
因此实现移栽生产机械化是我过蔬菜产业亟待解决的关键问题。
本文在分析了国内外移栽机械研究概况、发展趋势以及现有主要机型特点的基础上,根据我国蔬菜生产的实际情况,设计并研制了新型的悬杯式蔬菜移栽机。
针对吊篮式移栽机在钵苗过高时容易碰苗的问题,设计了悬杯式蔬菜移栽机,阐述了整机的结构及工作原理,并对关键部件进行了具体的结构设计。
通过采用水平向后张开的悬杯结构,降低了落苗过程中的伤苗率,提高了整机的栽植质量。
由于其悬杯水平左右开启,开口朝后,所以在特征参数1<λ的条件下进行移栽作业时作业时,落苗后张开的悬杯从钵苗的侧面沿机组前进方向离开,有效地解决了现有吊篮式移栽机在钵苗过高的情况下落苗容易出现的碰苗问题。
在理论分析的基础上,确定了悬杯式蔬菜移栽机整机的总体配置方案和栽植单体、传动系统、悬挂架、限深轮、地轮等零部件的具体结构,用三维设计软件SolidWorks 建立了整机的三维模型,并对其进行干涉检查。
关键词:蔬菜移栽机;悬杯式;栽苗器2AbstractIn recent years, with the adjustment of the economic and agricultural planting structure of China are pushed forward, the acreage of vegetables gradually increases and the vegetable industry accounts for a large proportion of the local economic benefits. Most vegetable production adopts the technology of seedling nursing, but the vegetable transplanter in our country develops slowly and vegetable transplanting is mainly by manual work for a long time. It has seriously hampered the development of vegetable industry in China. So it has become an urgent issue to achieve seedling transplanting mechanization for our vegetable industry.According to the actual situation of Chinese vegetable production, based on the analysis of domestic and foreign transplanter’s general situations, development trends and characteristics of existing models, a new cantilever cup vegetable transplanter is designed and manufactured. It uses a cantilever cup planting apparatus as the key component to load and plant seedlings. To solve the problem that the hanging basket transplanter is apt to impact the seedlings when the seedlings are too high ,the cantilever cup vegetable transplanter was designed .The structure and the working principle of whole machine were introduced ,and the detailed structure of key components was designed . By using the cantilever cup which splays in the horizontal plane and opens backwards ,the rate of damaged seedlings in the process of dropping seedlings was reduced and the whole machine’S planting quality was improved .Because of its cantilever cup opening backwards in the horizontal plane, so when the vegetable transplanter works under the situation of of characteristic coefficients 1<λ, the opening cup leaves the seedling from the side along whole machine’s forward direction, which effectively solve the problem that the existing hanging basket transplanter is apt to impact the seedlings when the seedlings are too high. Based on the theoretical analysis, the overall configuration of cantilever cup vegetable transplanter and the specific structure of transplanting unit, transmission system, suspension frame, depth wheel, and ground wheel were determined. Three-dimensional model of the machine was established by 3D design software SolidWorks and did the interference checking.Key words :vegetable transplanter ;cantilever cup ;planting apparatus前言我国是世界最大的蔬菜生产国.蔬菜产业发展迅速,成效显着,据世界粮农组织统计,我国蔬菜播种面积和产量分别占世界的43%、49%。
均居世界第一。
20世纪80年代中期以来,特别是90年代,随着全国农业结构调整步伐的加快和人们生活水平的提高,蔬菜生产规模不断扩大。
据相关资料统计。
我国蔬菜播种面积在上世纪80年代年均增长近10%。
90年代年均增长14.5%,本世纪前5年平均增长3%.到2007年蔬菜播种面积达到2.6亿亩.总产量5.65亿t,人均占有量420多kg。
此外,蔬菜也是我国主要出口创汇商品之一。
据统计,2007年我国累计出口蔬菜8l7.59万t,与2000年相比增加497.29万t,增长1.55倍;出口额62.14亿美元,与2000年相比增加41.33亿美元.增长1.99倍。
蔬菜业已成为增加农民收入的支柱产业。
2007年全国蔬菜播种面积(含西甜瓜)占农作物总播种面积的12.8%,总产值7200多亿元,占种植业总产值比例高达29%.在种植业中仅次于粮食。
蔬菜生产属劳动密集型产业.约占60%的蔬菜品种是通过育苗移栽方式种植的.秧苗手工栽植是劳动强度非常大仅次于收获作业的一项农田作业,它约占作物从种到收所需总劳动量的20%左右。
由于我国蔬菜移栽机械发展慢.秧苗栽植几乎全部由人工完成,劳动强度大、生产效率低,栽植质量差、生产成本高。
因此,实现蔬菜移栽机械化已成为农业生产的迫切需要。
1 蔬菜移栽机的研究发展1.1国外移栽机械的研究概况国外对蔬菜移栽机的研究起步较早,20世纪初期,欧洲一些国家开始大量种植蔬菜和经济作物,出现了早期的手工喂苗的秧苗栽植机具;30年代末40年代初期,手工喂苗的秧苗移栽机具的人工动作被移栽机构所取代,送苗入土过程实现了机械化;从50年代开始,多种不同结构型式的半自动移栽机被研制生产并使用,同时,育苗用土钵制钵机开始出现;到20世纪80年代,半自动移栽机已在西方国家的农业生产中广泛使用,制钵、育苗和移栽已形成完整的机械作业系统,实现了各种机具配套使用;到目前为止,欧洲在蔬菜育苗土钵成型及钵上单粒精密播种和自动移栽机械设备等技术上已经达到完善,并应用于实际生产中。
日本由于劳动力短缺,移栽机械的使用非常普及,机械化程度很高,广泛研制和使用全自动移栽机,各种移栽机专用性很强,一般只适用于一种农作物,如甜菜自动移栽机、洋葱自动移栽机(陈明,2010)。