怎样用单片机驱动LED数码管显示
单片机io口驱动led电路
单片机io口驱动led电路
单片机IO口驱动LED电路是一种常见的电子电路应用。
在这种
电路中,单片机的IO口用来控制LED的亮灭,实现不同的功能。
一
般来说,单片机的IO口输出电流能力有限,因此通常需要外部电路
来驱动LED。
一种常见的单片机IO口驱动LED电路是使用普通的NPN晶体管。
具体电路连接方式如下:
将LED的阳极连接到正极,阴极接地;
单片机的IO口通过一个限流电阻连接到NPN晶体管的基极;
NPN晶体管的发射极接地,集电极连接LED的阴极。
当单片机的IO口输出高电平时,NPN晶体管导通,LED亮起;
当IO口输出低电平时,NPN晶体管截止,LED熄灭。
这样就实现了
单片机IO口对LED的控制。
另外,为了保护单片机,还可以在IO口和NPN晶体管之间加上
一个限流电阻,限制电流的大小,防止对单片机的损坏。
此外,还可以使用集成的LED驱动芯片,如常见的ULN2003芯片,它能够为LED提供更大的驱动能力,同时还具有过流保护功能,能够保护单片机不受损坏。
总的来说,单片机IO口驱动LED电路的设计需要考虑到单片机
的输出电流能力、LED的工作电流、保护单片机的安全性等因素,
选用合适的驱动电路方案,以实现可靠的LED控制功能。
单片机控制LED点阵显示屏
单片机控制LED点阵显示屏一、简介单片机控制LED点阵显示屏是一种常见的电子显示器件,可以用于显示各种文字、图形等信息。
本文将介绍如何利用单片机来控制LED 点阵显示屏,实现信息的显示功能。
二、材料准备在开始搭建单片机控制LED点阵显示屏系统之前,我们需要准备以下材料:•单片机开发板:例如STC89C52•LED点阵显示屏:常见的有8×8、16×16等不同尺寸•连接线:用于连接单片机和LED点阵显示屏•电源:用于为单片机开发板和LED点阵显示屏供电三、搭建电路将单片机开发板和LED点阵显示屏通过连接线进行连接。
具体连接方法如下:•将单片机的IO口与LED点阵显示屏的对应引脚相连。
根据具体的LED点阵显示屏型号和单片机开发板的引脚分配情况,选择合适的IO口进行连接。
•将单片机的VCC引脚与LED点阵显示屏的VCC脚相连,将GND引脚与LED点阵显示屏的GND脚相连,确保电源供电正常。
四、编程控制编写单片机程序,实现对LED点阵显示屏的控制。
本文以STC89C52单片机为例,演示如何利用C语言编写简单的程序实现LED点阵显示屏的控制。
首先,需要使用单片机开发工具(如Keil、IAR等)创建一个新的工程。
在工程中添加必要的头文件,并定义相关的引脚和变量。
#include <reg52.h>sbit DIN = P1^0; // 数据引脚sbit CS = P1^1; // 片选引脚sbit CLK = P1^2; // 时钟引脚unsigned char code ledData[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};void delay(unsigned int time) {unsigned int i, j;for(i = time; i > 0; i--)for(j = 110; j > 0; j--); // 空循环延时}void sendData(unsigned char dat) {unsigned char i;for(i = 0; i < 8; i++) {CLK = 0; // 上升沿时钟信号DIN = dat & 0x80;dat <<= 1;CLK = 1;}}void display(unsigned char *data) {unsigned char i;CS = 0; // 片选信号有效for(i = 0; i < 8; i++) {sendData(data[i]);}CS = 1; // 片选信号无效}void mn() {while(1) {display(ledData);delay(2000);}}上述代码中,我们定义了三个引脚(DIN、CS、CLK)和一个缓存数组(ledData),分别用来控制LED点阵显示屏的数据引脚、片选引脚和时钟引脚。
基于51单片机的led数码管动态显示
基于51单片机的LED数码管动态显示LED数码管动态显示就是一位一位地轮流点亮各位数码管,对于每一位LED数码管来说,每隔一段时间点亮一次,利用人眼的“视觉暂留"效应,采用循环扫描的方式,分时轮流选通各数码管的公共端,使数码管轮流导通显示。
当扫描速度达到一定程度时,人眼就分辨不出来了。
尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,认为各数码管是同时发光的。
若数码管的位数不大于8位时,只需两个8位I/O口。
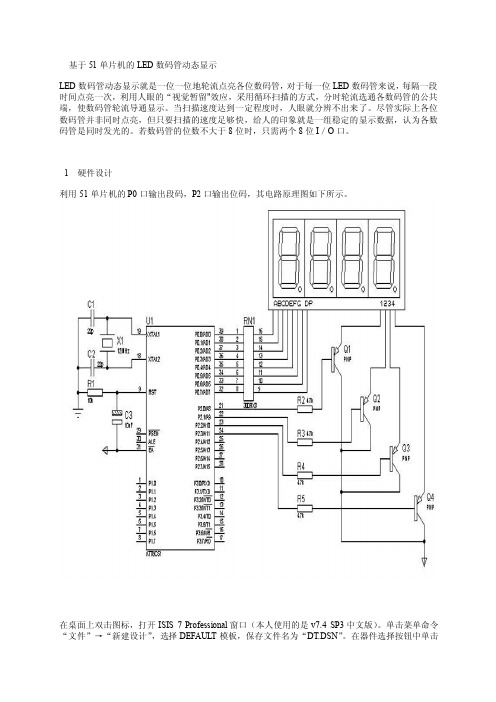
1 硬件设计利用51单片机的P0口输出段码,P2口输出位码,其电路原理图如下所示。
在桌面上双击图标,打开ISIS 7 Professional窗口(本人使用的是v7.4 SP3中文版)。
单击菜单命令“文件”→“新建设计”,选择DEFAULT模板,保存文件名为“DT.DSN”。
在器件选择按钮中单击“P”按钮,或执行菜单命令“库”→“拾取元件/符号”,添加如下表所示的元件。
51单片机A T89C51 一片晶体CRYSTAL 12MHz 一只瓷片电容CAP 22pF 二只电解电容CAP-ELEC 10uF 一只电阻RES 10K 一只电阻RES 4.7K 四只双列电阻网络Rx8 300R(Ω) 一只四位七段数码管7SEG-MPX4-CA一只三极管PNP四只若用Proteus软件进行仿真,则上图中的晶振和复位电路以及U1的31脚,都可以不画,它们都是默认的。
在ISIS原理图编辑窗口中放置元件,再单击工具箱中元件终端图标,在对象选择器中单击POWER 和GROUND放置电源和地。
放置好元件后,布好线。
左键双击各元件,设置相应元件参数,完成电路图的设计。
2 软件设计LED数码管动态显示是一位一位地轮流点亮各位数码管的,因此要考虑每一位点亮的保持时间和间隔时间。
保持时间太短,则发光太弱而人眼无法看清;时间太长,则间隔时间也将太长(假设N位,则间隔时间=保持时间X(N-1)),使人眼看到的数字闪烁。
单片机实验报告——LED数码管显示实验

单⽚机实验报告——LED数码管显⽰实验(此⽂档为word格式,下载后您可任意编辑修改!)《微机实验》报告LED数码管显⽰实验指导教师:专业班级:姓名:学号:联系⽅式:⼀、任务要求实验⽬的:理解LED七段数码管的显⽰控制原理,掌握数码管与MCU的接⼝技术,能够编写数码管显⽰驱动程序;熟悉接⼝程序调试⽅法。
实验内容:利⽤C8051F310单⽚机控制数码管显⽰器基本要求:利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
提⾼要求:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:yyyy (年份)mm.dd(⽉份.⽇).asm;Description: 利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
;Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000H ;复位⼊⼝AJMP MAINORG 000BH ;定时器0中断⼊⼝AJMP TIME0MAIN: ACALL Init_Device ;初始化配置MOV P0,#00H ;位选中第⼀个数码管MOV R0,#00H ;偏移指针初值CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#06HMOV TL0,#0C6H ;赋初值,定时1sLOOP: MOV A,R0ADD A,#0BH ;加偏移量MOVC +PC ;查表取,段码MOV P1,A ;段码给P1显⽰SETB TR0 ;开定时LOOP1: JNB PSW.1,LOOP1 ;等待中断CLR PSW.1INC R0 ;偏移指针加⼀CJNE R0,#0AH,LOOP3MOV R0,#00H ;偏移指针满10清零AJMP LOOP ;返回DB 0FCH,60H,0DAH,0F2H,66H ;段码数据表:0、1、2、3、4 DB 0B6H,0BEH,0E0H,0FEH,0F6H; 5、6、7、8、9 ;***************************************************************** ; 定时器0中断;***************************************************************** TIME0: SETB PSW.1 ;标志位置⼀MOV TH0,#06H ;定时器重新赋值MOV TL0,#0C6HLOOP3: CLR TR0 ;关定时RETI;***************************************************************** ;初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital ; P0.1 - Unassigned, Open-Drain, Digital ; P0.2 - Unassigned, Open-Drain, Digital ; P0.3 - Unassigned, Open-Drain, Digital ; P0.4 -Unassigned, Open-Drain, Digital ; P0.5 - Unassigned, Open-Drain, Digital ; P0.6 - Unassigned, Open-Drain, Digital ; P0.7 - Unassigned, Open-Drain, Digital ; P1.0 - Unassigned, Open-Drain, Digital ; P1.1 - Unassigned, Open-Drain, Digital ; P1.2 - Unassigned, Open-Drain, Digital ; P1.3 - Unassigned, Open-Drain, Digital ; P1.4 - Unassigned, Open-Drain, Digital ; P1.5 - Unassigned, Open-Drain, Digital ; P1.6 - Unassigned, Open-Drain, Digital ; P1.7 - Unassigned, Open-Drain, Digital ; P2.0 - Unassigned, Open-Drain, Digital ; P2.1 -Unassigned, Open-Drain, Digital ; P2.2 - Unassigned, Open-Drain, Digital ; P2.3 - Unassigned, Open-Drain, Digital mov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend提⾼部分:;*********************************************************;Filename: shumaguan2.asm;Description:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:; 2012 (年份); 12.07(⽉份.⽇); 12.34(⼩时.分钟);Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000HAJMP MAINORG 000BHAJMP TIME0MAIN: ACALL Init_DeviceMOV R0,#00H ;⽤于位选MOV R1,#00H ;⽤于段选MOV R2,#22H ;置偏移量,⽤于控制模式MOV R4,#8MOV R5,#250CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#0FFHMOV TL0,#0C0H ;定时器赋初值1msBACK: MOV P0,R0 ;位选MOV A,R0ADD A,#40H ;选下⼀位MOV R0,AMOV A,R1ADD A,R2 ;加偏移量MOVC +PC ;查表取段码MOV P1,A ;段码给P1显⽰LOOP: SETB TR0 ;开定时HERE: JNB PSW.1,HERE ;等待中断CLR PSW.1DJNZ R5,BACKMOV R5,#250DJNZ R4,BACKMOV R4,#8 ;循环2000次(2s)MOV A,R2ADD A,#04H ;偏移量加04H,到下⼀模式段码初值地址 MOV R2,ACJNE R2,#2EH,LOOP2MOV R2,#22H ;加三次后偏移量回到初值LOOP2: AJMP BACK ;返回进⼊下⼀模式;段码数据表:DB 0DAH,60H,0FCH,0DAH ; 2102DB 0E0H,0FCH,61H,60H ; 701. 1DB 66H,0F2H,0DBH,60H ; 432. 1;*****************************************************************; 定时器0中断;***************************************************************** TIME0: MOV TH0,#0FFH MOV TL0,#0C0HCLR TR0SETB PSW.1INC R1 ;偏移指针加⼀CJNE R1,#04H,LOOPMOV R1,#00H ;偏移指针满04H清零RETI;***************************************************************** ; 初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital; P0.1 - Unassigned, Open-Drain, Digital; P0.2 - Unassigned, Open-Drain, Digital; P0.3 - Unassigned, Open-Drain, Digital; P0.4 - Unassigned, Open-Drain, Digital; P0.5 - Unassigned, Open-Drain, Digital; P0.6 - Unassigned, Open-Drain, Digital; P0.7 - Unassigned, Open-Drain, Digital; P1.0 - Unassigned, Open-Drain, Digital; P1.1 - Unassigned, Open-Drain, Digital; P1.2 - Unassigned, Open-Drain, Digital; P1.3 - Unassigned, Open-Drain, Digital; P1.4 - Unassigned, Open-Drain, Digital; P1.5 - Unassigned, Open-Drain, Digital; P1.6 - Unassigned, Open-Drain, Digital; P1.7 - Unassigned, Open-Drain, Digital; P2.0 - Unassigned, Open-Drain, Digital; P2.1 - Unassigned, Open-Drain, Digital; P2.2 - Unassigned, Open-Drain, Digital; P2.3 - Unassigned, Open-Drain, Digitalmov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend六、程序测试⽅法与结果、软件性能分析软件调试总体截图:基础部分:软件运⾏时,我们发现P0端⼝为00H,P1端⼝以依次为FCH、60H、DAH、F2H、66H、B6H、BEH、E0H、FEH、F6H。
实验四--单片机驱动数码管显示
实验四单片机驱动数码管显示一实验目的1 学习单片机驱动数码管动态显示的电路设计和编程方法二实验原理1、单片机系统中常用的显示器有:发光二极管LED(Light Emitting Diode)显示器、液晶LCD(Liquid Crystal Display)显示器、CRT显示器等。
LED、LCD显示器有两种显示结构:段显示和点阵显示。
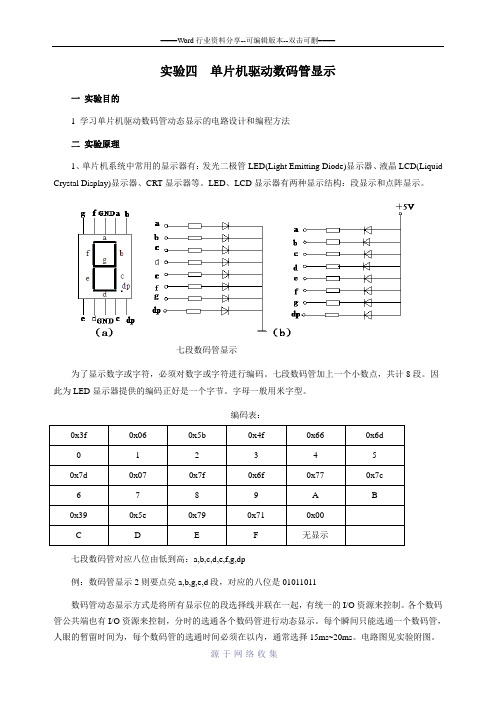
七段数码管显示为了显示数字或字符,必须对数字或字符进行编码。
七段数码管加上一个小数点,共计8段。
因此为LED显示器提供的编码正好是一个字节。
字母一般用米字型。
编码表:0x3f 0x06 0x5b 0x4f 0x66 0x6d0 1 2 3 4 50x7d 0x07 0x7f 0x6f 0x77 0x7c6 7 8 9 A B0x39 0x5e 0x79 0x71 0x00C D E F 无显示七段数码管对应八位由低到高:a,b,c,d,e,f,g,dp例:数码管显示2则要点亮a,b,g,e,d段,对应的八位是01011011数码管动态显示方式是将所有显示位的段选择线并联在一起,有统一的I/O资源来控制。
各个数码管公共端也有I/O资源来控制,分时的选通各个数码管进行动态显示。
每个瞬间只能选通一个数码管,人眼的暂留时间为,每个数码管的选通时间必须在以内,通常选择15ms~20ms。
电路图见实验附图。
三实验内容理解动态显示电路图,参考驱动程序,单片机P0口作段码输出控制,P1口作位码控制,使单片机驱动6个7段数码管输出实验当天年、月、日六位数字。
四、实验步骤(1)单片机最小应用系统1的P0口接段码口a~h,P1口接位码口S1~S6。
(2)在KEIL软件下编写程序并调试,完成实验内容要求。
(3)下载程序,通过实验箱验证设计电路和编写的程序是否达到实验要求。
下载程序,通过实验箱验证设计电路和编写的程序是否达到实验要求。
五参考程序与电路汇编语言参考程序:ORG 0000HLJMP STARTORG 0030HSTART: MOV R0,#30HMOV R1,#40HMOV 30H,#1MOV 31H,#2MOV 32H,#1MOV 33H,#1MOV 34H,#2MOV 35H,#0START1: MOV DPTR,#TABMOV R3,#6LOOP: MOV A,@R0MOVC A,@A+DPTRMOV @R1,AINC R0INC R1DJNZ R3,LOOPMOV R3,#6MOV R1,#40HMOV A,#20HLOOP1: MOV P1,@R1MOV P2,AACALL DELAYMOV P2,#00HRR AINC R1DJNZ R3,LOOP1LJMP START1TAB:DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,77H,7CH,58H,5EH,7BH,71H,00H,40H DELAY: MOV R4,#100LOOP2: DJNZ R4,LOOP2RETENDC语言参考程序:#include <reg51.h>#include <intrins.h>unsigned char code table[]={0x3f,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};unsigned char date[]={1,2,1,1,2,0};void delay(){unsigned char j;for(j=0;j<=100;j++);}void main(){unsigned char i,a;while(1){a=0x40;for(i=0;i<6;i++){P1=table[date[i]];a=_cror_(a,1);P2=a;delay();P2=0x00;}}}数码管动态显示电路图(位选信号为高电平,段选信号为高电平):。
动态数码管单片机编程

动态数码管单片机编程动态数码管是一种常见的显示器件,广泛应用于各种计时、计数以及显示等场合。
而在单片机编程中,控制动态数码管的显示则是一项常见的任务。
本文将以动态数码管单片机编程为主题,探讨其原理和应用,并介绍如何编写代码实现动态数码管的显示。
一、动态数码管的原理动态数码管是由多个LED组成的,通过控制LED的亮灭状态来实现数字的显示。
在动态数码管中,每一个时间段只有一个数码管被点亮,然后迅速切换到下一个数码管,通过高频率的切换,给人眼产生了连续的效果。
这种切换速度一般在几十毫秒到几毫秒之间,一般人眼无法察觉到这种切换。
二、动态数码管的编程实现在单片机编程中,动态数码管的显示是通过控制数码管的引脚来实现的。
首先,需要定义数码管的引脚连接方式,比如使用IO口、SPI、I2C等方式连接数码管。
然后,根据具体的引脚连接方式,编写相应的代码来控制数码管的显示。
在编程中,首先需要通过引脚控制数码管的开关,使其在一个时间段内只有一个数码管被点亮。
这可以通过设置引脚的高低电平来实现。
然后,需要通过编写循环来实现数码管的切换,使其可以显示多个数字。
这可以通过在循环中逐个点亮不同的数码管来实现。
三、动态数码管的应用动态数码管广泛应用于各种计时、计数以及显示等场合。
比如,在计时器中,可以使用动态数码管来显示计时结果;在计数器中,可以使用动态数码管来显示计数值;在温度计中,可以使用动态数码管来显示温度值等。
动态数码管不仅可以显示数字,还可以显示一些字母和符号,通过合理的编程可以实现更多的显示效果。
在进行动态数码管单片机编程时,需要注意以下几点:1. 确保引脚的连接正确,避免引脚接错或短路等问题;2. 确保编写的代码逻辑正确,避免出现死循环或逻辑错误等问题;3. 确保数码管的显示效果清晰,避免出现闪烁或显示不完整等问题;4. 确保编写的代码简洁高效,避免占用过多的处理器资源。
五、总结动态数码管单片机编程是一项常见的任务,通过控制数码管的引脚来实现数字的显示。
单片机实验报告——LED数码管显示实验
单片机实验报告——LED数码管显示实验引言单片机是一种基础的电子元件,作为电子专业的学生,学习单片机编程是必不可少的。
在单片机编程实验中,学习如何使用IO口驱动LED数码管显示是重要的一部分。
在此次实验中,我们用到的是STM32F103C8T6单片机,与之相配套的是LED数码管、杜邦线等元件,并利用Keil uVision5软件进行编程操作。
本文的目的是通过实验与实验数据的分析说明单片机控制LED数码管的方法,希望对单片机初学者有所帮助。
实验原理1.LED数码管简介LED数码管是利用发光二极管实现数字和字母的显示,其外观形式有共阳和共阴两种。
共阳型数码管的共阳端是接在公共的端子上,数字和字母的每一个元素(即1、2、3、4、5、6、7、8、9、A、B、C、D、E、F)的生命延伸出去,称为”高”电平;共阴型数码管的共阴端是接在公共的端子上,数字和字母的每一个元素的生命也是分别延伸出去,但称为”低”电平。
2.STM32F103C8T6单片机STM32F103C8T6单片机是一款功能完备的32位MCU产品,它具有高性能,低功耗的特点,可广泛应用于许多硬件系统。
此次实验所需的LED数码管的显示量是5个(共阳型),因此我们只需要5个IO口即可将STM32F103C8T6单片机与LED数码管连接起来。
实验材料STM32F103C8T6单片机、LED数码管、杜邦线、电容、电阻、面包板等。
实验步骤1.硬件连接:将LED数码管的针脚连接到单片机的IO口,如下图所示:其中P0-P4分别代表数字0-4,PE2口作为LED点亮控制口,分别接入面包板中。
2.软件设置:使用Keil uVision5进行程序编写,将代码下载到单片机控制器内,开启电路,即可观察到LED数码管上的数字进行了变化。
代码如下所示:实验结果将程序下载到开发板后,启动单片机,即可看到红色LED数码管逐个显示从0-9的数字。
达到9后又从0开始循环。
实验过程及结论本次实验中彻底了解到了用单片机控制LED数码管的方法,单片机控制LED数码管变化是通过选中不同的IO口来完成的,利用Keil uVision5软件可以完成程序编写。
单片机led数码管的静态控制显示方式实验报告
单片机led数码管的静态控制显示方式实验报告开发环境:
本实验使用的是Keil uV5,MCU为STC89C52RC,和四位数码管模块。
实验目的:
本次实验是静态控制数码管显示,目的是使用单片机控制四位数码管上显示一个数字。
实验准备:
硬件:STC89C52RC单片机模块,4位数码管模块;
软件:Keil uV51.3 + STC-ISP软件;
实验原理:
单片机控制数码管显示,需要使用三个管脚控制,分别为A,B,C,当A为高电平时,B和C同时为低电平时,这时显示第一个数字;当B为高电平时,A和C同时为低电平时,这时显示第二个数字;当C为高电平时,A和B同时为低电平时,这时显示第三个数字。
实验步骤:
1. 设计电路:确定STC89C52RC控制四位数码管控制连接。
2. 安装软件:安装Keil uV5以及STC-ISP软件。
3. 编程:根据原理进行程序编写,编写完整的显示代码,实现任意数字的显示。
4. 烧录:将编写的程序通过STC-ISP软件烧录,然后重新启动单片机。
5. 测试:当烧写完成,四位数码管显示正确且稳定时,表示实验测试成功。
实验结果:
实验成功,STC89C52RC控制四位数码管显示正确且稳定。
实验结论:
实验证明,基于STC89C52RC芯片,通过编写程序,可以实现不同数字或字母在四位
数码管上的显示,达到定量和定性的要求。
单片机控制的LED数码管动态驱动电路
单片机控制的LED数码管动态驱动电路
数码管有共阴和共阳的区分,单片机都可以进行驱动,但是驱动的方
法却不同,并且相应的0~9 的显示代码也正好相反。
两位共阳数码管的单片机驱动方法,电路如下图:
P2.6 和P2.7 端口分别控制数码管的十位和个位的供电,当相应的端口变成
低电平时,驱动相应的三极管会导通,+5V 通过IN4148 二极管和驱动三极管
给数码管相应的位供电,这时只要P0 口送出数字的显示代码,数码管就能正
常显示数字。
因为要显示两位不同的数字,所以必须用动态扫描的方法来实现,就是先个位显示1 毫秒,再十位显示1 毫秒,不断循环,这样只要扫描时
间小于1/50 秒,就会因为人眼的视觉残留效应,看到两位不同的数字稳定显示。
共阴数码管的单片机驱动方法,电路如下图:+5V 通过1K 的排阻直接给数码管的8 个段位供电,P2.6 和P2.7 端口分别控制数码管的十位和个位的供电,当相应的端口变成低电平时,相应的位可以吸入电流。
单片机的P0 口输出的
数据相当于将数码管不要显示的数字段对地短路,这样数码管就会显示需要的
数字。
共阴数码管的硬件更简单,所以在批量生产时,硬件开销小,节省PCB 面积,减少焊接工作量,降低综合成本,所以采用共阴数码管更有利于批
量生产,现在销售的试验板都是采用共阴数码管了。
tips:感谢大家的阅读,本
文由我司收集整编。
仅供参阅!。
单片机驱动LED数码管电路及编程
单片机驱动LED数码管电路及编程单片机I/O的应用最典型的是通过I/O口与7段LED数码管构成显示电路,我们从常用的LED显示原理开始,详尽讲解利用单片机驱动LED数码管的电路及编程原理,目的在于通过这一编程范例,让初学者了解I/O口的编程原理,意在起举一反三,抛砖引玉的作用。
左图为实验电路图,我们使用80C51单片机,电容C1、C2和CRY1组成时钟振荡电路,这部分基本无需调试,只要元件可靠即会正常起振。
C3和R1为单片机的复位电路,80C51的并行口P1.0-P1.7直接与LED数码管的a-f引脚相连,中间接上限流电阻R3-R10。
值得一提的是,80C51并行口的输出驱动电流并非很大,为使LED有足够的亮度,LED数码管应选用高亮度的器件。
此外,图中的80C51还可选用C51系列的其它单片机,只要它们的指令系统兼容C51即可正常运行,程序可直接移植,例如选用低价Flash型的AT89C1051或2051(详细技术手册)等,它们的ROM可反复擦写,非常适合作实验用途。
程序清单:01 START: ORG 0100H ;程序起始地址02 MAIN: MOV R0,#00H ;从“0”开始显示03 MOV DPTR,#TABLE ;表格地址送数据指针04 DISP: MOV A,R0 ;送显示05 MOVC A,@A+ADPTR ;指向表格地址06 MOV P1,A ;数据送LED07 ACALL DELAY ;延时08 INC R0 ;指向下一个字符09 CJNE R0,#0AH,DISP ;未显示完,继续10 AJMP MAIN ;下一个循环11 DELAY: MOV R1,#0FFH ;延时子程序,延时时间赋值12 LOOP0: MOV R2,#0FFH13 LOOP1: DJNZ R2,LOOP114 DJNZ R1,LOOP015 RET ;子程序返回16 TABLE: DB 0C0H ;字型码表17 DB 0F9H18 DB 0A4H19 DB 0B0H20 DB 99H21 DB 92H22 DB 82H23 DB 0F8H24 DB 80H25 DB 90H26 END ;程序结束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
怎样用单片机驱动LED数码管显示
驱动LED数码管有很多方法,按显示方式分,有静态显示和动态(扫描)显示,按译码方式可分硬件译码和软件译码之分。
静态显示就是显示驱动电路具有输出锁存功能,单片机将所要显示的数据,显示数据稳定,占用很少的CPU时间。
动态显示需要CPU时刻对显示器件进行数据刷新,显示数据有闪烁感,占用的CPU时间多。
这两种显示方式各有利弊;静态显示虽然数据稳定,占用很少的CPU
时间,但每个显示单元都需要单独的显示驱动电路,使用的硬件较多;
动态显示虽然有闪烁感,占用的CPU时间多,但使用的硬件少,能节
省线路板空间。
硬件译码就是显示的段码完全由硬件完成,CPU只要送出标准的BCD
码即可,硬件接线有一定标准。
软件译码是用软件来完成硬件的功能,硬件简单,接线灵活,显示段码完全由软件来处理,是目前常用的显示驱动方式。
比较常用的显示驱动芯片有:74LS164 , CD4094+ULN2003(2803) ,74HC595+ULN2003(2803) , TPIC6B595,AMT9095B, AMT9595等许多。
另外,市场上还有一些专用的LED扫描驱动显示模块如MAX7219等,功能很强,价格稍高一些。
下面是一个用74LS164驱动显示的例子和一个用4094扫描驱动显示的例子:
上例图中加了一个PNP型的三极管来控制数码管的电源,是因为164没有数据锁存端,数据在传送过程中,对输出端来说是透明的,这样,数据在传送过程中,数码管上有闪动现象,驱动的位数越多,闪动现象越明显。
为了消除这种现象,在数据传送过程中,关闭三极管使数码管没电不显示,数据传送。