MSP430F42x用户手册
MSP430中文数据手册
MSP430混合信号微控制器数据手册产品特性●低电压范围:2.5V~5.5V 超低功耗●超低功耗——活动模式:330μA at 1MHz, 3V——待机模式:0.8μA——掉电模式(RAM数据保持):0.1μA ●从待机模式唤醒响应时间不超过6μs ●16位精简指令系统,指令周期200ns ●基本时钟模块配置基本时钟模块配置——多种内部电阻——多种内部电阻——单个外部电阻——单个外部电阻——32kHz晶振晶振——高频晶体——高频晶体——谐振器——谐振器——外部时钟源——外部时钟源●带有三个捕获/比较寄存器的16位定时器(Timer_A)串行在线可编程●串行在线可编程●采用保险熔丝的程序代码保护措施采用保险熔丝的程序代码保护措施该系列产品包括●该系列产品包括——MSP430C111:2K字节ROM,128字节RAM ——MSP430C112:4K字节ROM,256字节RAM ——MSP430P112:4K字节OTP,256字节RAM 原型●EPROM原型——PMS430E112:4KB EPROM, 256B RAM ●20引脚塑料小外形宽体(SOWB)封装,20引脚陶瓷双列直插式(CDIP)封装(仅EPROM)●如需完整的模块说明,请查阅MSP430x1xx系列用户指南(文献编号:SLAU049 产品说明TI公司的MSP43O系列超低功耗微控制器由一些基本功能模块按照不同的应用目标组合而成。
在便携式测量应用中,这种优化的体系结构结合五种低功耗模式可以达到延长电池寿命的目的。
以达到延长电池寿命的目的。
MSP430MSP430系列的CPU 采用16位精简指令系统,集成有16位寄存器和常数发生器,发挥了最高的代码效率。
它采用数字控制振荡器(DCO DCO)),使得从低功耗模式到唤醒模式的转换时间小于6μs.MSP430x11x 系列是一种超低功耗的混合信号微控制器,系列是一种超低功耗的混合信号微控制器,它拥有一个内置的它拥有一个内置的16位计数器和14个I/0引脚。
MSP430寄存器手册
2-时钟模块
微控网为你准备的 MSP430F 单片机入门必修课
微控网
MSP430F1XX 系列时钟模块图 时基模块结构如上图 : MSP430 系列单片机基础时钟主要是由低频晶体振荡器,高频晶体振荡器,数字控制 振荡器(DCO),锁频环(FLL)及 FLL+等模块构成。由于 430 系列单片机中的型号不同, 而时钟模块也将有所不同。虽然不同型号的单片机的时基模块有所不同,但这些模块产 生出来的结果是相同的.在 MSP430F13、 14 中是有 TX2 振荡器的, 而 MSP430F11X,F11X1 中是用 LFXT1CLK 来代替 XT2CLK 时钟信号的.在时钟模块中有 3 个(对于 F13,F14)时钟 信号源(或 2 个时钟信号源,对于 F11X、F11X1): 1-LFXT1CLK: 低频 /高频时钟源.由外接晶体振荡器,而无需外接两个振荡电容器.较 常使用的晶体振荡器是 32768HZ。 2-XT2CLK: 高频时钟源.由外接晶体振荡器。需要外接两个振荡电容器,较常用 的晶体振荡器是 8MHZ。 3-DCOCLK: 数字可控制的 RC 振荡器。
微控网为你准备的 MSP430F 单片机入门必修课
微控网
1-复位模块
MSP430 单片机系统复位电路 从上 MSP430 系统复位电路功能模块图中可以看到了两个复位信号,一个是上电复位信 号 POR(Power On Reset)和上电清除信号 PUC(Power Up Clear)。 POR 信号是器件的复位信号,此信号只有在以下的事件发生时才会产生: □器件上电时。 □RST/NMI 引脚配置为复位模式,当 RST/NMI 引脚生产低电平时。 当 POR 信号产生时, 必然会产生 PUC 信号; 而 PUC 信号的产生时不会产生 POR 信号。 会引起产生 PUC 信号的事件: □POR 信号发生时。 □ 启动看门狗时,看门狗定时器计满时。 □ 向看门狗写入错误的安全参数值时。 □向片内 FLASH 写入错误的安全参数值时。 MSP430 单片机系统复位后器件的初始 当 POR 信号或 PUC 信号发生时引起器件复位后,器件的初始化状态为: □RST/NMI 引脚配置为复位模式。 □ I/O 引脚为输入模式。
MSP430F2XX中文手册(加了标签) 9. 定时器 B
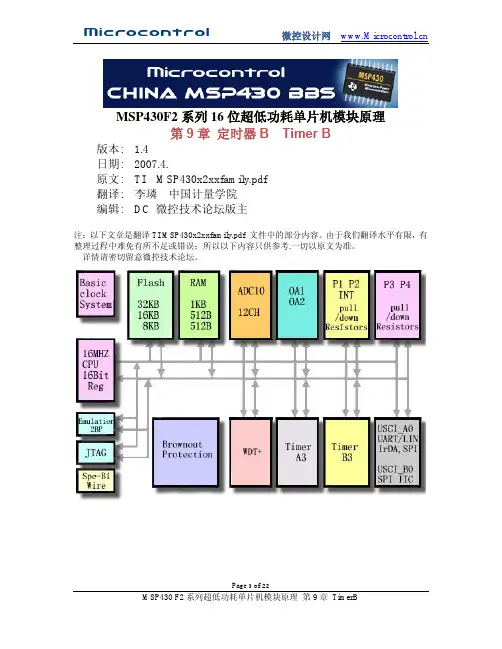
MSP430F2系列16位超低功耗单片机模块原理第9章定时器B Timer B版本: 1.4日期: 2007.4.原文: TI MSP430x2xxfamily.pdf翻译: 李璘中国计量学院编辑: DC 微控技术论坛版主注:以下文章是翻译TI MSP430x2xxfamily.pdf 文件中的部分内容。
由于我们翻译水平有限,有整理过程中难免有所不足或错误;所以以下内容只供参考.一切以原文为准。
详情请密切留意微控技术论坛。
Page 1 of 22定时器B(Timer_B,以后简写为TB)是一个16位的定时/计数器,并复合了捕获/比较寄存器。
Timer_B3(拥有3个捕获比较器)只存在于MSP430x2xx中。
章节9.1 Timer_B 介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-29.2 Timer_B 操作方法. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-49.3 Timer_B 寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-199.1 Timer_B 介绍TB是一个16位的定时/计数器,拥有3个或7个捕获/比较寄存器。
TB可以支持捕获/比较功能、PWM输出和定时器功能。
TB还有扩展中断的功能,中断可以由定时器溢出产生或捕获比较寄存器产生。
TB的特性如下:l4种操作模式的异步16位定时/计数器l可选择配置的时钟源l3个或7个可配置的捕获/比较器l可配置的PWM输出l加载时同步的双缓冲比较锁存l对所有TB中断快速响应的中断向量寄存器9.1.1 和定时器A的相同点和不同点定时器B和定时器A的不同点如下:l定时器B的长度是可编程的,可编程为8,10,12,16位l定时器B TBCCRx寄存器是双缓冲的,并可以编组l所有定时器B的输出可以为高阻抗状态l SCCI位功能在定时器B中不存在TB的结构图见图9−1.图9−1.TB结构图Page 2 of 22Page 3 of 229.2 Timer_B 的操作方法TB 模块由用户软件来配置,TB 的配置将在下面的章节讨论。
MSP430FE42X系列混合信号微控制器
MSP430FE42X系列混合信号微控制器特性:●低电源电压范围:2.7V-3.6V●超低功耗:活动模式(仅MSP430):400uA@1MHz,3.0V待机模式:1.1uA关闭模式(RAM保持):0.1uA●五种省电模式●6us内从待机模式唤醒●锁频换FLL+●16位RISC体系,125ns指令周期●嵌入式信号处理用于单相电能计算(cESP430)●带三分捕获/比较寄存器的16位定时器Timer_A●集成128段LCD驱动器●串行通信接口USART,通过软件选择异步UART或同步SPI●基本定时器支持实时时钟●节电检测器●带可编程电平检测的电源电压管理/监控●串行在线编程,无需外部编程电压●安全熔丝可编程代码保护●Flash器件由自举装载程序系列器件包括:− MSP430FE423:8KB + 256B Flash Memory, 256B RAM− MSP430FE425:16KB + 256B Flash Memory, 512B RAM− MSP430FE427:32KB + 256B Flash Memory, 1KB RAM●可用封装:64脚方形扁平封装(QFP)完整的模块说明,参见MSP430x4xx系列用户指南,文献号SLAU056 说明:德州仪器MSP430系列超低功耗控制器由针对多种不同应用具有不同外围模块的芯片组成的。
器结构与五种低功耗模式相结合,适合在便携测量应用中实现延长电池寿命。
芯片具有强大的16位精简指令集,16位寄存器和常数发生器,可以实现最大代码执行效率。
带数字控制振荡器的锁频环FLL+提供从低功耗模式到活动模式小于6us的迅速唤醒。
MSP430FE42X系列是一块配置有三个独16位∑-△模式转换器的微控制器,内嵌入式信号处理器内核、特殊应用包括单项二线和单相三线电能表,可应用在防窃电电表功能中。
可用选项引脚说明:功能框图:引脚功能简要说明CPUMSP430 CPU具有一个16位精简指令结构,对应用来说是高透明的。
MSP f 中文手册
MSP430F552X中文手册及例程一、先写一篇开个头:这样快速闯入MSP430学习过程进入各个电子产品公司的网站,招聘里面嵌入式占据了大半工程师职位。
广义的嵌入式无非几种:传统的什么51单片机、 MSP430称做嵌入式微控制器;ARM是嵌入式微处理器;当然还有DSP;FPGA。
我们现在就不说别的,就说MSP430单片机,多数想学MSP430的童鞋,对89C51内核系列的单片机是很熟悉的,为了加深对MSP430 系列单片机的认识吗,迅速闯入MSP430学习过程,就必须彻底了解MSP430单片机,我们不妨将51单片机和MSP430两者进行一下比较。
第一点, 51内核单片机是8 位单片机。
其指令是采用的被称为“ CISC ”的复杂指令集,共具有111 条指令。
而MSP430 单片机是16 位的单片机,采用了精简指令集( RISC )结构,只有简洁的27 条指令,大量的指令则是模拟指令,众多的寄存器以及片内数据存储器都可参加多种运算。
这些内核指令均为单周期指令,功能强,运行的速度快。
第二点,MCU主要分为两种工作模式:待机与执行。
51内核单片机正常情况下消耗的电流为mA级 ,在掉电状态下,其耗电电流仍约为3mA左右 ;即使在掉电方式下,电源电压可以下降到2V ,但是为了保存内部RAM 中的数据,还需要提供约50uA的电流。
而430单片机功耗是在uA级的,工作电流极小,并且超低功耗,关断状态下的电流仅为0.1μA,待机电流为0.8μA,常规模式下的(250μA/1MIPS@3V),端口漏电流不足50 nA,并可零功耗掉电复位(BOR)。
另外,该芯片属低电器件,仅需1.8~3.6V电压供电,因而可有效降低系统功耗。
MSP430将低功耗模式扩展为7种,分别对应不同应用场合及任务的低功耗方式。
以睡眠模式为例,包括深度睡眠模式RTC:只有时钟在跑而其他都不动,目前,TI宣布其MSP430在RTC模式下最低功耗仅为360nA。
MSP430 单片机基础知识说明书
MSP430Microcontroller BasicsMSP430Microcontroller Basics John H.DaviesAMSTERDAM•BOSTON•HEIDELBERG•LONDONNEW YORK•OXFORD•PARIS•SAN DIEGOSAN FRANCISCO•SINGAPORE•SYDNEY•TOKYONewnes is an imprint of ElsevierNewnes is an imprint of Elsevier30Corporate Drive,Suite400,Burlington,MA01803,USALinacre House,Jordan Hill,Oxford OX28DP,UKCopyright©2008,Elsevier Ltd.All rights reserved.No part of this publication may be reproduced,stored in a retrieval system,or transmitted in any formor by any means,electronic,mechanical,photocopying,recording,or otherwise,without the prior written permission of the publisher.Permissions may be sought directly from Elsevier’s Science&Technology Rights Department in Oxford, UK:phone:(+44)1865843830,fax:(+44)1865853333,E-mail:************************.You may also complete your request online via the Elsevier homepage()by selecting “Support&Contact”then“Copyright and Permission”and then“Obtaining Permissions.”Recognizing the importance of preserving what has been written,Elsevier prints itsbooks on acid-free paper whenever possible.Library of Congress Cataloging-in-Publication DataApplication submittedBritish Library Cataloguing-in-Publication DataA catalogue record for this book is available from the British Library.ISBN:978-0-7506-8276-3For information on all Newnes publications,visit our Web site at:08091011121310987654321Printed in the United States of America“To Elizabeth.”ContentsPreface (xi)Chapter1:Embedded Electronic Systems and Microcontrollers (1)1.1What(and Where)Are Embedded Systems? (1)1.2Approaches to Embedded Systems (2)1.3Small Microcontrollers (5)1.4Anatomy of a Typical Small Microcontroller (8)1.5Memory (11)1.6Software (15)1.7Where Does the MSP430Fit? (16)Chapter2:The Texas Instruments MSP430 (21)2.1The Outside View—Pin-Out (21)2.2The Inside View—Functional Block Diagram (24)2.3Memory (25)2.4Central Processing Unit (30)2.5Memory-Mapped Input and Output (32)2.6Clock Generator (33)2.7Exceptions:Interrupts and Resets (36)2.8Where to Find Further Information (37)Chapter3:Development (43)3.1Development Environment (44)3.2The C Programming Language (46)3.3Assembly Language (55)3.4Access to the Microcontroller for Programming and Debugging (57)3.5Demonstration Boards (59)3.6Hardware (64)3.7Equipment (65)viii ContentsChapter4:A Simple Tour of the MSP430 (67)4.1First Program on a Conventional Desktop Computer (68)4.2Light LEDs in C (70)4.3Light LEDs in Assembly Language (72)4.4Read Input from a Switch (80)4.5Automatic Control:Flashing Light by Software Delay (91)4.6Automatic Control:Use of Subroutines (99)4.7Automatic Control:Flashing Light by Polling Timer_A (105)4.8Header Files and Issues Brushed under the Carpet (114)Chapter5:Architecture of the MSP430Processor (119)5.1Central Processing Unit (119)5.2Addressing Modes (125)5.3Constant Generator and Emulated Instructions (131)5.4Instruction Set (132)5.5Examples (146)5.6Reflections on the CPU and Instruction Set (153)5.7Resets (157)5.8Clock System (163)Chapter6:Functions,Interrupts,and Low-Power Modes (177)6.1Functions and Subroutines (178)6.2What Happens when a Subroutine Is Called? (178)6.3Storage for Local Variables (179)6.4Passing Parameters to a Subroutine and Returning a Result (183)6.5Mixing C and Assembly Language (185)6.6Interrupts (186)6.7What Happens when an Interrupt Is Requested? (188)6.8Interrupt Service Routines (190)6.9Issues Associated with Interrupts (196)6.10Low-Power Modes of Operation (198)Chapter7:Digital Input,Output,and Displays (207)7.1Digital Input and Output:Parallel Ports (208)7.2Digital Inputs (216)7.3Switch Debounce (225)7.4Digital Outputs (238)7.5Interface between3V and5V Systems (243)7.6Driving Heavier Loads (247)7.7Liquid Crystal Displays (252)7.8Driving an LCD from an MSP430x4xx (256)7.9Simple Applications of the LCD (264)Contents ix Chapter8:Timers (275)8.1Watchdog Timer (276)8.2Basic Timer1 (281)8.3Timer_A (287)8.4Measurement in the Capture Mode (300)8.5Output in the Continuous Mode (318)8.6Output in the Up Mode:Edge-Aligned Pulse-Width Modulation (330)8.7Output in the Up/Down Mode:Centered Pulse-Width Modulation (349)8.8Operation of Timer_A in the Sampling Mode (352)8.9Timer_B (353)8.10What Timer Where? (356)8.11Setting the Real-Time Clock:State Machines (357)Chapter9:Mixed-Signal Systems:Analog Input and Output (369)9.1Comparator_A (371)9.2Analog-to-Digital Conversion:General Issues (393)9.3Analog-to-Digital Conversion:Successive Approximation (402)9.4The ADC10Successive-Approximation ADC (407)9.5Basic Operation of the ADC10 (412)9.6More Advanced Operation of the ADC10 (424)9.7The ADC12Successive-Approximation ADC (432)9.8Analog-to-Digital Conversion:Sigma–Delta (438)9.9The SD16_A Sigma–Delta ADC (446)9.10Operation of SD16_A (459)9.11Signal Conditioning and Operational Amplifiers (475)9.12Digital-to-Analog Conversion (485)Chapter10:Communication (493)10.1Communication Peripherals in the MSP430 (495)10.2Serial Peripheral Interface (497)10.3SPI with the USI (504)10.4SPI with the USCI (513)10.5A Thermometer Using SPI in Mode3with the F2013as Master (520)10.6A Thermometer Using SPI in Mode0with the FG4618as Master (526)10.7Inter-integrated Circuit Bus (534)10.8A Simple I²C Master with the USCI_B0on a FG4618 (542)10.9A Simple I²C Slave with the USI on a F2013 (549)10.10State Machines for I²C Communication (559)10.11A Thermometer Using I²C with the F2013as Master (567)10.12Asynchronous Serial Communication (574)10.13Asynchronous Communication with the USCI_A (581)x Contents10.14A Software UART Using Timer_A (590)10.15Other Types of Communication (599)Chapter11:The Future:MSP430X (601)11.1Architecture of the MSP430X (601)11.2Instruction Set of the MSP430X (607)11.3Where Next? (614)11.4Conclusion (617)Appendix A:Kickstarting the MSP430 (619)A.1Introduction to EW430 (619)A.2Developing a Project in C (621)A.3Debugging with the Simulator (627)A.4Debugging with the Emulator (630)A.5Developing a Project in Assembly Language (633)A.6Tips for Using EW430 (636)A.7Tips for Specific Development Kits (640)Appendix B:Further Reading (645)Books and Articles (645)Newsletters,Magazines,and Journals (651)Index (655)Preface About a decade ago,I took over the teaching of afirst-year,second-semester course on digital electronics.It coveredflip-flops,counters,and state machines,all built fromsmall-scale integrated circuits.One of the projects at the end was to build a digital die.In many ways it was an excellent exercise because there were so many feasible ways in which it could be approached—simple counters,Johnson counters,or state machines.My concern was that it was very close to the project that I had experienced in myfirst course on digital electronics,which was back in the mid-1970s.The technology was close to the state of the art then,but was it still appropriate after so many years?Another feature of our course is that it is taken not only by electronic engineers but also by students from the science faculty,mostly computer scientists.I wanted these students to leave with a feeling for what can readily be done with modern programmable electronics insmaller-scale systems.I therefore replaced the material in the second half of the course with microcontrollers.(Do not worry,state machines were not abandoned—they are taught with hardware description languages in the context of programmable logic devices.) More recently,I thought that the time had come to review the choice of microcontroller. We traditionally used8-bit processors because modern devices have versatile peripherals and sophisticated embedded emulation and are quite powerful enough for most applications.Then the Texas Instruments MSP430caught my eye.A problem with8-bit microcontrollers is that8bits are too few for addresses,which are typically16bits long, and this means that data and addresses cannot be treated on an equal footing.In contrast, the MSP430has a uniform,16-bit architecture throughout:The address bus,data bus,and registers in the CPU are all16bits wide.The CPU has a modern design with plenty of registers,most of which can be used equally for data or addresses.It has a small instruction set with orthogonal addressing and an ingenious constant generator,which is used to emulate many operations that would otherwise need their own,distinct instructions.In many ways these features make the16-bit MSP430simpler than a typical8-bit processor.xii PrefaceOf course an elegant architecture does not generate many sales in the real world.More important are the range of peripherals and development tools.The MSP430offers the usual selection of peripherals plus some less common modules,including sigma–delta analog-to-digital converters and operational amplifiers.Some devices include hardware multipliers and digital-to-analog converters,which provide a complete signal chain(although,of course,Texas Instruments also offers an enormous range of digital signal processors).There is a choice of two free development environments(always an important considerationin education).One is IAR Embedded Workbench,which is available for a wide range of microcontrollers.Another,Code Composer Essentials,is produced by Texas Instruments itself.A third option is the GCC toolchain for MSP430at .I have not yet mentioned the major selling point of the MSP430,which is its low power consumption.Many microcontrollers are based on long-established designs withlow-power modes grafted onto them.This means that returning to full power from alow-power mode is often awkward and in some cases is virtually a reset operation.The MSP430is refreshingly different because it was designed from the outset for low-power operation.Entry to low-power modes and exit from them is straightforward,supported by a versatile clock system.For example,the clock module includes a digitally controlled oscillator that restarts at full speed from a low-power mode in less than1s in newer devices.In many applications the MSP430is put into a low-power mode,from which it is awakened by interrupts.These automatically restore full power for the interrupt service routine and return the processor to low power when it hasfinished.No extra code is needed for this:It is an intrinsic part of the interrupt mechanism.Most peripherals are designed for low power,although this can sometimes make them a little more complicated than would otherwise be necessary.The main point is that low-power modes are easy to use.The quality of the data sheets and user’s guides is another issue in education and those for the MSP430arefine.Unfortunately one item was missing in the area of documentation:a suitable textbook in English.I wrote this book tofill the gap.OutlineMost textbooks on microcontrollers follow one of two approaches.Thefirst is to present a sequence of projects to explore successive aspects of the device.I think that this works well for simpler architectures,notably the8-bit PICs,because it enables the reader to write functioning programs rapidly.This always feels good.Unfortunately I am not sure that it works as well for more advanced peripherals,which need considerable explanation before the reader can learn to use them fully.Preface xiii The alternative approach is to describe each module in the microcontroller fully and in turn,starting with the CPU and instruction set and working out to the peripherals.This makes for a well-organized reference book but can be tedious as a textbook.I tried to steer a course between these two.My inspiration is Kernighan and Ritchie’s The C Programming Language,which starts with a“Tutorial Introduction”before exploring the language systematically in subsequent chapters.I think that it takes rather more introduction to a microcontroller so the“simple tour,”which is my equivalent to the tutorial,does not start until Chapter4.Before that,thefirst chapter contains a general introduction to embedded systems and microcontrollers.This sets the scene for Chapter2, which focuses on the MSP430and gives a broad view of its features.I include a chapter on hardware and software for developing applications,which I hope will be particularly useful for readers who are new to microcontrollers.It also contains some reminders of features of the C language that are more prominent in programs for microcontrollers than desktop computers—bitfields for instance.This leads into the tour,which runs through some simple programs to illustrate input and output,the inevitableflashing LEDs,and an introduction to one of the timers(the MSP430has several).The remainder of the book provides a more systematic description of the MSP430.I start with the CPU and instruction set,and show how the constant generator is used to provide further“emulated”instructions.The clock system is also described in this chapter.It is followed by Chapter6on subroutines,interrupts,and low-power modes.I already mentioned that a major feature of the MSP430is the way in which low-power modes are handled automatically when interrupts are serviced.Subsequent chapters are concerned with the most widely used peripherals.Chapter7on digital input and output starts with the usual parallel ports and goes on to describe liquid crystal displays,which many MSP430s can drive directly.There is a wide selection of timers in the MSP430,which are covered in the next chapter.This is followed by a lengthy chapter on analog input and output.The MSP430offers many peripherals for analog-to-digital conversion,ranging from a simple comparator to a16-bit sigma–delta module.I do not think that you can use any of these without some understanding of their characteristics,which explains the length of this chapter.Some MSP430s include operational amplifiers and digital-to-analog converters,which I described briefly.Thefinal long chapter is on communication.I cover only three types of communication—serial peripheral interface,inter-integrated circuit bus,and asynchronous—but there are several peripherals for these in different variants of the MSP430,so there is a lot to explain.xiv PrefaceThe very last chapter provides an introduction to the MSP430X,an extended architecture with a20-bit address bus that can handle1MB of memory.There is also an appendix to take the reader through the steps of editing,building,and debugging thefirst project, which can sometimes be a frustrating experience.Ifind it annoying when books contain large chunks copied directly from data sheets and have tried to avoid this.You cannot hope to program a microcontroller without the data sheet at your side.Having said that,I start by going through each bit of the registers that control the peripherals used for the early programs.The idea is to explain how a typical peripheral is configured.After that I become more selective and concentrate on the overall function of the peripheral ually I pick out a few details that I think need extra explanation but skip the more mundane aspects.They are in the example programs inany case.I include links to many of Texas Instruments’application notes because I can see no point in repeating material that has been thoroughly explained already.Ifind that many students are strangely reluctant to use this valuable resource.There are a few reminders about code examples for the same reason.C or Assembly Language?Most small microcontrollers are now programmed using the C language so the question might seem redundant.In fact often columns in newletters on embedded systems often carry articles with titles such as“Is Assembly Language Dead?”However,the answer seems to be clearly that assembly language is not dead for small microcontrollers,such as the MSP430.Most code is written in C but you may occasionally need to write a subroutine in assembly language to perform an operation that cannot be written out directly in C.Two examples are operations that require bitwise rotations rather than shifts and calculations that can be done more efficiently by exploiting special instructions of the CPU,such as binary-coded decimal arithmetic.Intrinsic functions often avoid the need for assembly language but not always.More important,assembly language is often needed for debugging and this is the most compelling reason for describing it in a textbook.Small microcontrollers typically spend much of their time interacting with hardware by manipulating the registers that control the peripherals.Debugging may require stepping through lines of assembly language to check each step.You have to look at the manual to check the details of each instruction,but it helps to have a general idea of how the assembly language works.Preface xv From a pedagogical point of view,assembly language is useful to illustrate the architecture of the processor.In fact the MSP430is simple enough that you can explore the thinking behind the design of the instruction set.Besides,assembly language can be fun(in small doses).My approach is to develop thefirst,simple programs in Chapter4using both C and assembly language to show the relation between them.However,C dominates by the end of the chapter.Assembly language makes a strong showing in the next two chapters,which cover architecture,subroutines,and interrupts,including a section on mixing C and assembly language.Almost all remaining programs are in C,with assembly language reappearing only briefly for a function to convert numbers to binary-coded decimal.The listings in the text are read directly from the programs that I tested.Companion Web SitePlease visit the companion Web site for this book at/companions/9780750682763and download the programs used as examples in the book.These programs were read into the text of the book from the workspaces that I used for testing,which means that the downloadedfiles should match the book perfectly.Links are also provided for data sheets,user’s guides,and development tools.Solutions to the odd-numbered examples are freely available on the companion Web site but the remaining solutions are offered only to instructors. AcknowledgmentsIt is a pleasure to thank numerous people who have helped me in various ways to write this book.Many are from Texas Instruments:Bonnie Baker,Jacob Borgeson,Andreas Dannenberg,Colin Garlick,Thomas Mitnacht,and Robert Owen.I am particularly grateful to Adrian Valenzuela for his comments on thefinal draft.Several engineers from other companies were kind enough to provide advice and assistance:Edward Gibbins and Steve Duckworth from IAR,Tom Baugh of SoftBaugh,Paul Curtis of Rowley Associates,David Dyer of Ericsson and Fernando Rodriguez while he was at Texas Instruments.Finally,I am grateful to colleagues and students at Glasgow University,from whom I have learnt an enormous amount over the years.I’d like to thank Fernando Rodriguez(not the same person who was at Texas Instruments)and David Muir in particular,with both of whom I have run a wide range of projects on embedded systems and microcontrollers—from tutor boxes withflip-flops to the electronic systems of a Formula Student racing car.John Davies,Milngavie。
MSP430F2XX中文手册(加了标签) 10.通用串口
MSP430F2系列16位超低功耗单片机模块原理第10章通用串口界面Universal Serial Interface 版本: 1.5日期: 2007.5.原文: TI MSP430x2xxfamily.pdf翻译: 陈安都湖南长沙-中南大学编辑: DC 微控技术论坛版主注:以下文章是翻译TI MSP430x2xxfamily.pdf 文件中的部分内容。
由于我们翻译水平有限,有整理过程中难免有所不足或错误;所以以下内容只供参考.一切以原文为准。
详情请密切留意微控技术论坛。
Page 1 of 15通用串行接口模块(USI)提供与硬件模块的SPI和I2C串行通信。
本章讨论这两种模式。
USI模块包含在MSP420X20XX系列中。
主题10.1 USI的介绍10.2 USI的使用10.3 USI的寄存器10.1 USI的介绍USI模块提供支持同步串行通信的基本功能。
一般地,一个8、16位移位寄存器能用来输出数据流,少许的几条指令就可以执行串行通信。
另外,USI包含的内置硬件可以模拟SPI和I2C通信。
USI模块还包括中断,可以进一步减少串行通信的通用程序并且保持MSP430的低功耗特性。
USI模块的特性包括:支持三线SPI模式支持I2C模式可变的数据长度在LPM4方式下不需要内部时钟MSB或LSB指令可选在I2C模式下能控制SCL打开、停止监测在主机模式下的仲裁丢失监测可编程的时钟发生器可选择的钟极性和相位控制Page 2 of 15表10-1展示了SPI模式下的USI模块Page 3 of 15表10-2展示了I2C模式下的USI模块10.2 USI的操作USI模块主要由移位寄存器和位计数器组成,通过逻辑控制来支持SPI和I2C 通信。
USI的移位寄存器为USISR,通过软件直接控制数据的移入和移出。
位计数器计算采样位的数目以及在USICNTX位写零时设置USI中断标志位Page 4 of 15USIIFG。
MSP430F42X0混合信号微控制器
特性
低电源电压范围:1.8V-3.6V
超低功耗:活动模式:250 A@1MHz,2.2V
待机模式:1.1 A
关闭模式(RAM保持):0.1 A
五种省电模式
6 s内从待机模式唤醒
16位RISC体系,125ns指令周期
16位带内部参考的∑-△模数转换器
12位数模转换器
带3个捕获/比较寄存器的16位定时器Timer_A
节电(Brownout)检测器
引导加载程序(BSL)
串行在线编程,无需外部编程电压
安全熔丝可编程代码保护
集成56段带对比度控制LCD驱动器
MSP430x42x0系列器件包括: - MSP430F4250: 16KB ROM,256B RAM 256B Flash Memory
P1.2/TA1/A4- 26 I/O 通用数字I/O/Timer_A,捕获:CCI1A,比较:Out1输出/模拟输入A4-
P1.1/TA0/MCLK 27 I/O 通用数字I/O/Timer_A,捕获:CCI0B/MCLK输出
P1.0/TA0
28 I/O
通用数字I/O/ Timer_A,捕获:CCI0A 输入/比较:Out0输出/BSL
生器,其余的寄存器可用作通用寄存器.
外设利用一个数据,地址和控制总线连接到CPU,并能容易的利用所有处理指令操作.
PC/R0
SP/R1
SR/CG1/R2
CG2/R3
R4
R5
●
●
R14
R15
程序计数器
堆栈指针
状态寄存器
常数发生器
MSP430 键盘程序
/*MSP430F42X系列单片机16位ADC通用程序库说明:该驱动程序库包含了常用的16位ADC操作与控制功能函数,如选择通道、设置信号放大/*带有缓冲区及长短键的键盘通用程序库说明:该程序库包含了读取键盘的相关函数,并且包含了一个键盘缓冲区,当主程序执行较慢,而遇到连续快速的键盘输入来不及及时读取的情况下,新的按键信息将会自动存入键盘缓冲队列内,每次调用读键盘函数时会依顺序读取,保证键盘操作不会丢失。
并且带有长短按键识别功能,当按键时间小于2秒时,返回短键,按键超过2秒后,每隔0.25秒返回一次长按键。
该键盘程序可以作为各种程序的底层驱动使用。
要使用该库函数,需要将本文件(Key.c)添加进工程,并在需要调用键盘函数的文件开头处包含"Key.h";还需要开启一个定时器,在定时中断内调用Key_ScanIO()函数。
设置定时中断的频率在16~128次/秒之间。
*///+-------------+//|定时中断|软件结构//+-------------+//|//+-------------++-------------++-------------+// KEY1_IN -->| Key_ScanIO||KeyBuff[]||Key_GetKey() |// KEY2_IN -->|键盘扫描|-->|键盘缓冲|-->|Key_WaitKey()|-->应用程序// KEY3_IN -->|函数||队列(FIFO) ||键盘读取函数|//+-------------++-------------++-------------+//////MSP430F4XX//+---------------+//+---KEY1--|P1.5|//||XOUT|-----//+---KEY2--|P1.6|32.768KHz Watch Crystal//||XIN|-----//+---KEY3--|P1.7|//|+---------------+//GND//#include<msp430x42x0.h>#define KEYBUFF_SIZE8/*键盘缓冲区大小,根据程序需要自行调整*/ char KeyBuff[KEYBUFF_SIZE]; //定义键盘缓冲队列数组(FIFO)char Key_IndexW=0;//键盘缓冲队列写入指针(头指针)char Key_IndexR=0;//键盘缓冲队列读取指针(尾指针char Key_Count=0;//键盘缓冲队列内记录的按键次数char KEY1_State=0;char KEY2_State=0;char KEY3_State=0;/*3个按键的状态变量*/#define NOKEY0#define PUSH_KEY1#define LONG_PUSH 2#define KEY1_IN (P5IN&BIT5) //KEY1输入IO的定义(P6.4)#define KEY2_IN (P5IN&BIT6) //KEY2输入IO的定义(P6.5)#define KEY3_IN (P5IN&BIT7) //KEY3输入IO的定义(P6.6)#define KEY1 0x01//SET按键#define KEY2 0x02//增加按键#define KEY3 0x04//减小按键#define LONG0x80/*连续长键标志位宏定义*/#define FIRSTLONG 0xC0/*首次长键标志位宏定义*//***************************************************************** ************名称:Key_InBuff()*功能:将一次键值压入键盘缓冲队列*入口参数:Key:被压入缓冲队列的键值*出口参数:无********************************************************************* *******/void Key_InBuff(char Key){if(Key_Count>=KEYBUFF_SIZE) return;//若缓冲区已满,放弃本次按键_DINT();Key_Count++;//按键次数计数增加KeyBuff[Key_IndexW] = Key;//从队列头部追加新的数据if (++Key_IndexW >=KEYBUFF_SIZE) //循环队列,如果队列头指针越界{Key_IndexW = 0;//队列头指针回到数组起始位置}_EINT();}/*********************************************************** ******************名称:Key_GetKey()*功能:从键盘缓冲队列内读取一次键值*入口参数:无*出口参数:若无按键,返回0,否则返回一次按键键值。
MSP430F2XX中文手册(加了标签) 5.Flash块控制器
Page 1 of 18MSP430F2系列16位超低功耗单片机模块原理第5章 Flash 块控制器版本: 1.3日期: 2007.6.原文: TI MSP430x2xxfamily.pdf翻译: 余川编辑: DC 微控技术论坛版主注:以下文章是翻译TI MSP430x2xxfamily.pdf 文件中的部分内容。
由于我们翻译水平有限,有整理过程中难免有所不足或错误;所以以下内容只供参考.一切以原文为准。
详情请密切留意微控技术论坛。
第五章 Flash 存储控制器本章介绍了MSP430x2xx 系列单片机Flash 存储控制器的操作。
5.1 Flash 存储器的介绍Page 2 of 18 5.2 Flash 存储器的分段结构5.3 Flash 存储器的操作5.4 Flash 存储器的控制寄存器5.1 Flash 存储器的介绍MSP430 的F lash 存储器是可位/字节/字寻址和编程的存储器。
该模块由一个集成控制器来控制编程和擦除的操作。
控制器包括三个寄存器,一个时序发生器及一个提供编程/擦除电压的电压发生器。
MSP430 的F lash 存储器的特点有:● 产生内部编程电压● 可位/字节/字编程● 超低功耗操作● 支持段擦除和多段模块擦除F lash 存储器和控制器的结构框图如图5−1所示。
注意:F lash 写入和擦除操作期间的最小电压值V CC 应为2.2V 。
如果在操作期间V CC 低于2.2V ,写入或擦除的结果将是不确定的。
图5−1 F lash 存储器框图Page 3 of 185.2 Flash 存储器的分段结构MSP430 F lash 存储器分成多个段。
可对其进行单个位/字节/字的写入,但是最小的擦除单位是段。
F lash 存储器分为主存储器和信息存储器两部分,在操作上两者没有什么区别,程序代码和数据可以存储于任意部分。
两部分的区别在于段的大小和物理地址。
信息存储器有四个64字节的段,主存储器有两个或更多的512字节的段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D Wake-Up From Standby Mode in Less Than 6 μsD Frequency-Locked Loop, FLL+D 16-Bit RISC Architecture, 125-ns Instruction Cycle TimeD Three Independent 16-bit Sigma-Delta A/D Converters With Differential PGA Inputs D 16-Bit Timer_A With Three Capture/Compare RegistersD Integrated LCD Driver for 128 Segments D Serial Communication Interface (USART),Asynchronous UART or Synchronous SPI Selectable by Software DBrownout DetectorD Bootstrap Loader in Flash Devices DFamily Members Include:− MSP430F423:8KB + 256B Flash Memory,256B RAM− MSP430F425:16KB + 256B Flash Memory,512B RAM− MSP430F427:32KB + 256B Flash Memory,1KB RAMD Available in 64-Pin Quad Flat Pack (QFP)DFor Complete Module Descriptions, Refer to the MSP430x4xx Family User’s Guide ,Literature Number SLAU056descriptionThe T exas Instruments MSP430 family of ultralow power microcontrollers consist of several devices featuring different sets of peripherals targeted for various applications. The architecture, combined with five low power modes, is optimized to achieve extended battery life in portable measurement applications. The device features a powerful 16-bit RISC CPU, 16-bit registers, and constant generators that contribute to maximum code efficiency. The digitally controlled oscillator (DCO) allows wake-up from low-power modes to active mode in less than 6 μs.The MSP430F42x series are microcontroller configurations with three independent 16-bit sigma-delta A/D converters, each with an integrated differential programmable gain amplifier input stage. Also included is a built-in 16-bit timer, 128 LCD segment drive capability, hardware multiplier, and 14 I/O pins.Typical applications include high resolution applications such as handheld metering equipment, weigh scales,and energy meters.This integrated circuit can be damaged by ESD. Texas Instruments recommends that all integrated circuits be handled with appropriate precautions. Failure to observe proper handling and installation procedures can cause damage. ESD damage can range from subtle performance degradation to complete device failure. Precision integrated circuits may be more susceptible to damage because very small parametric changes could cause the device not to meet its published specifications. These devices have limited built-in ESD protection.Copyright © 2004−2007 T exas Instruments IncorporatedPRODUCTION DATA nformat on s current as of publ cat on date.Products conform to specifications per the terms of Texas Instruments standard warranty. Production processing does not necessarily include testing of all parameters.Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.AVAILABLE OPTIONSPACKAGED DEVICEST APLASTIC 64-PIN QFP(PM)−40°C to 85°CMSP430F423IPM MSP430F425IPM MSP430F427IPMpin designation{P1.5/TACLK/ACLK/S28P 2.3/S V S I N P 2.4/U T X D 0P 2.5/U R X D 0R S T /N M I T C K T M S T D I /T C L K T D O /T D I P 1.0/T A 0P 1.1/T A 0/M C L K P 1.2/T A 1/S 31P 1.3/S V S O U T /S 30P 1.4/S 29S 5S 6S 7S 8S 9S 10S 11S 12S 13S 14S 15S 16S 17S 18S 19S 20P1.6/SIMO0/S27P1.7/SOMI0/S26P2.0/TA2/S25P2.1/UCLK0/S24R33R23R13R03COM3COM2COM1COM0S23S21S22A0.0+A0.0−A1.0+A1.0−A2.0+A2.0−XIN XOUTP2.2/STE0S0S1S2S4S3V REFA V C CDV CC A V S SD V S S†Open connection recommended for all unused analog inputs.functional block diagramDV DV AV AVRST/NMIMSP430F42x Terminal FunctionsTERMINALPNI/O DESCRIPTIONNAME NO.DV CC1Digital supply voltage, positive terminal.A0.0+2I Internal connection to SD16 Channel 0, input 0 +. (see Note 1)A0.0−3I Internal connection to SD16 Channel 0, input 0 −. (see Note 1)A1.0+4I Internal connection to SD16 Channel 1, input 0 +. (see Note 1)A1.0−5I Internal connection to SD16 Channel 1, input 0 −. (see Note 1)A2.0+6I Internal connection to SD16 Channel 2, input 0 +. (see Note 1)A2.0−7I Internal connection to SD16 Channel 2, input 0 −. (see Note 1)XIN8I Input port for crystal oscillator XT1. Standard or watch crystals can be connected.XOUT9O Output terminal of crystal oscillator XT1V REF10I/O Input for an external reference voltage / internal reference voltage output (can be used as mid-voltage) P2.2/STE011I/O General-purpose digital I/O / slave transmit enable—USART0/SPI modeS012O LCD segment output 0S113O LCD segment output 1S214O LCD segment output 2S315O LCD segment output 3S416O LCD segment output 4S517O LCD segment output 5S618O LCD segment output 6S719O LCD segment output 7S820O LCD segment output 8S921O LCD segment output 9S1022O LCD segment output 10S1123O LCD segment output 11S1224O LCD segment output 12S1325O LCD segment output 13S1426O LCD segment output 14S1527O LCD segment output 15S1628O LCD segment output 16S1729O LCD segment output 17S1830O LCD segment output 18S1931O LCD segment output 19S2032O LCD segment output 20S2133O LCD segment output 21S2234O LCD segment output 22S2335O LCD segment output 23COM036O Common output, COM0−3 are used for LCD backplanes.COM137O Common output, COM0−3 are used for LCD backplanes.COM238O Common output, COM0−3 are used for LCD backplanes.COM339O Common output, COM0−3 are used for LCD backplanes.R0340I Input port of fourth positive (lowest) analog LCD level (V5)NOTE 1:Open connection recommended for all unused analog inputs.MSP430F42x Terminal Functions (Continued) TERMINALPN I/O DESCRIPTION NAME NO.R1341I Input port of third most positive analog LCD level (V4 or V3)R2342I Input port of second most positive analog LCD level (V2)R3343O Output port of most positive analog LCD level (V1)P2.1/UCLK0/S2444I/O General-purpose digital I/O / external clock input-USART0/UART or SPI mode, clock output—USART0/SPI mode / LCD segment output 24 (See Note 1)P2.0/TA2/S2545I/O General-purpose digital I/O / Timer_A Capture: CCI2A input, Compare: Out2 output / LCD segment output 25 (See Note 1)P1.7/SOMI0/S2646I/O General-purpose digital I/O / slave out/master in of USART0/SPI mode / LCD segment output 26 (See Note 1)P1.6/SIMO0/S2747I/O General-purpose digital I/O / slave in/master out of USART0/SPI mode / LCD segment output 27 (See Note 1)P1.5/TACLK/ ACLK/S2848I/OGeneral-purpose digital I/O / Timer_A and SD16 clock signal TACLK input / ACLK output (divided by 1,2, 4, or 8) / LCD segment output 28 (See Note 1)P1.4/S2949I/O General-purpose digital I/O / LCD segment output 29 (See Note 1)P1.3/SVSOUT/S3050I/O General-purpose digital I/O / SVS: output of SVS comparator / LCD segment output 30 (See Note 1)P1.2/TA1/S3151I/O General-purpose digital I/O / Timer_A, Capture: CCI1A, CCI1B input, Compare: Out1 output / LCD segment output 31 (See Note 1)P1.1/TA0/MCLK52I/O General-purpose digital I/O / Timer_A, Capture: CCI0B input / MCLK output. Note: TA0 is only an input on this pin / BSL receiveP1.0/TA053I/O General-purpose digital I/O / Timer_A, Capture: CCI0A input, Compare: Out0 output / BSL transmit TDO/TDI54I/O Test data output port. TDO/TDI data output or programming data input terminal.TDI/TCLK55I Test data input or test clock input. The device protection fuse is connected to TDI.TMS56I Test mode select. TMS is used as an input port for device programming and test.TCK57I Test clock. TCK is the clock input port for device programming and test.RST/NMI58I Reset input or nonmaskable interrupt input portP2.5/URXD059I/O General-purpose digital I/O / receive data in—USART0/UART modeP2.4/UTXD060I/O General-purpose digital I/O / transmit data out—USART0/UART modeP2.3/SVSIN61I/O General-purpose digital I/O / Analog input to brownout, supply voltage supervisorAV SS62Analog supply voltage, negative terminal. Supplies SD16, SVS, brownout, oscillator, and LCD resistive divider circuitry.DV SS63Digital supply voltage, negative terminalAV CC64Analog supply voltage, positive terminal. Supplies SD16, SVS, brownout, oscillator, and LCD resistive divider circuitry; must not power up prior to DV CC.NOTE 1:LCD function selected automatically when applicable LCD module control bits are set, not with PxSEL bits.General-Purpose Register Program Counter Stack Pointer Status Register Constant Generator General-Purpose Register General-Purpose Register General-Purpose Register PC/R0SP/R1SR/CG1/R2CG2/R3R4R5R12R13General-Purpose Register General-Purpose Register R6R7General-Purpose Register General-Purpose Register R8R9General-Purpose Register General-Purpose Register R10R11General-Purpose Register General-Purpose RegisterR14R15short-form descriptionCPUThe MSP430 CPU has a 16-bit RISC architecture that is highly transparent to the application. All operations, other than program-flow instructions,are performed as register operations in conjunction with seven addressing modes for source operand and four addressing modes for destination operand.The CPU is integrated with 16 registers that provide reduced instruction execution time. The register-to-register operation execution time is one cycle of the CPU clock.Four of the registers, R0 to R3, are dedicated as program counter, stack pointer, status register,and constant generator respectively. The remaining registers are general-purpose registers.Peripherals are connected to the CPU using data,address, and control buses, and can be handled with all instructions.instruction setThe instruction set consists of 51 instructions with three formats and seven address modes. Each instruction can operate on word and byte data.Table 1 shows examples of the three types of instruction formats; the address modes are listed in Table 2.Table 1. Instruction Word FormatsDual operands, source-destination e.g. ADD R4,R5R4 + R5 −−−> R5Single operands, destination only e.g. CALL R8PC −−>(TOS), R8−−> PC Relative jump, un/conditionale.g. JNEJump-on-equal bit = 0Table 2. Address Mode DescriptionsADDRESS MODES DSYNTAX EXAMPLE OPERATION Register D D MOV Rs,Rd MOV R10,R11R10 −−> R11IndexedD D MOV X(Rn),Y(Rm)MOV 2(R5),6(R6)M(2+R5)−−> M(6+R6)Symbolic (PC relative)D D MOV EDE,TONI M(EDE) −−> M(TONI)Absolute D DMOV &MEM,&TCDAT M(MEM) −−> M(TCDAT)Indirect D MOV @Rn,Y(Rm)MOV @R10,Tab(R6)M(R10) −−> M(Tab+R6)Indirect autoincrement D MOV @Rn+,Rm MOV @R10+,R11M(R10) −−> R11R10 + 2−−> R10ImmediateDMOV #X,TONIMOV #45,TONI #45 −−> M(TONI)NOTE:S = source D = destinationoperating modesThe MSP430 has one active mode and five software-selectable low-power modes of operation. An interrupt event can wake up the device from any of the five low-power modes, service the request, and restore back to the low-power mode on return from the interrupt program.The following six operating modes can be configured by software:D Active mode (AM)−All clocks are activeD Low-power mode 0 (LPM0)−CPU is disabledACLK and SMCLK remain active, MCLK is available to modulesFLL+ loop control remains activeD Low-power mode 1 (LPM1)−CPU is disabledACLK and SMCLK remain active, MCLK is available to modulesFLL+ loop control is disabledD Low-power mode 2 (LPM2)−CPU is disabledMCLK, FLL+ loop control, and DCOCLK are disabledDCO’s dc-generator remains enabledACLK remains activeD Low-power mode 3 (LPM3)−CPU is disabledMCLK, FLL+ loop control, and DCOCLK are disabledDCO’s dc-generator is disabledACLK remains activeD Low-power mode 4 (LPM4)−CPU is disabledACLK is disabledMCLK, FLL+ loop control, and DCOCLK are disabledDCO’s dc-generator is disabledCrystal oscillator is stoppedinterrupt vector addressesThe interrupt vectors and the power-up starting address are located in the address range of 0FFFFh−0FFE0h.The vector contains the 16-bit address of the appropriate interrupt-handler instruction sequence.INTERRUPT SOURCE INTERRUPT FLAG SYSTEM INTERRUPT WORD ADDRESS PRIORITYPower-upExternal ResetWatchdogFlash memoryPC Out-of-Range (see Note 4)WDTIFGKEYV(see Note 1)Reset0FFFEh15, highestNMIOscillator FaultFlash memory access violationNMIIFG (see Notes 1 and 3)OFIFG (see Notes 1 and 3)ACCVIFG (see Notes 1 and 3)(Non)maskable(Non)maskable(Non)maskable0FFFCh140FFFAh13SD16SD16CCTLx SD16OVIFG,SD16CCTLx SD16IFG(see Notes 1 and 2)Maskable0FFF8h120FFF6h11Watchdog Timer WDTIFG Maskable0FFF4h10 USART0 Receive URXIFG0Maskable0FFF2h9 USART0 Transmit UTXIFG0Maskable0FFF0h80FFEEh7 Timer_A3TACCR0 CCIFG (see Note 2)Maskable0FFECh6Timer_A3TACCR1 and TACCR2CCIFGs, and TACTL TAIFG(see Notes 1 and 2)Maskable0FFEAh5I/O port P1 (eight flags)P1IFG.0 to P1IFG.7(see Notes 1 and 2)Maskable0FFE8h40FFE6h30FFE4h2I/O port P2 (eight flags)P2IFG.0 to P2IFG.7(see Notes 1 and 2)Maskable0FFE2h1Basic Timer1BTIFG Maskable0FFE0h0, lowest NOTES: 1.Multiple source flags2.Interrupt flags are located in the module.3.(Non)maskable: the individual interrupt-enable bit can disable an interrupt event, but the general interrupt-enable cannot.4. A reset is generated if the CPU tries to fetch instructions from within the module register memory address range (0h−01FFh) or fromwithin unused address ranges (from 0600h to 0BFFh).special function registersMost interrupt and module enable bits are collected into the lowest address space. Special function register bits that are not allocated to a functional purpose are not physically present in the device. Simple software access is provided with this arrangement.interrupt enable 1 and 2Address 0hWDTIE:Watchdog-timer interrupt enable. Inactive if watchdog mode is selected. Active if watchdog timer is configured in interval timer mode.OFIE:Oscillator-fault-interrupt enable NMIIE:Nonmaskable-interrupt enable ACCVIE:Flash access violation interrupt enableURXIE0:USART0: UART and SPI receive-interrupt enable UTXIE0:USART0: UART and SPI transmit-interrupt enableAddress 1hBTIE:Basic Timer1 interrupt enableinterrupt flag register 1 and 2Address 02hWDTIFG:Set on watchdog timer overflow (in watchdog mode) or security key violation. Reset on V CC power up or a reset condition at the RST/NMI pin in reset mode.OFIFG:Flag set on oscillator fault NMIIFG:Set via RST/NMI pinURXIFG0:USART0: UART and SPI receive flag UTXIFG0:USART0: UART and SPI transmit flagAddress 3hBTIFG:Basic Timer1 interrupt flagmodule enable registers 1 and 2rw–0rw–0Address 04hURXE0:USART0: UART mode receive enable UTXE0:USART0: UART mode transmit enableUSPIE0:USART0: SPI mode transmit and receive enableAddress 05hLegend:rw−0,1:Bit Can Be Read and Written. It Is Reset or Set by PUC.Bit Can Be Read and Written. It Is Reset or Set by POR.SFR Bit Not Present in Device.memory organizationMSP430F423MSP430F425MSP430F427MemoryInterrupt vector Code memory Size Flash Flash 8KB0FFFFh − 0FFE0h 0FFFFh − 0E000h 16KB0FFFFh − 0FFE0h 0FFFFh − 0C000h 32KB0FFFFh − 0FFE0h 0FFFFh − 08000h Information memory Size 256 Byte 010FFh − 01000h 256 Byte 010FFh − 01000h 256 Byte 010FFh − 01000h Boot memory Size 1kB0FFFh − 0C00h 1kB0FFFh − 0C00h 1kB0FFFh − 0C00h RAM Size 256 Byte 02FFh − 0200h 512 Byte 03FFh − 0200h 1KB05FFh − 0200h Peripherals16-bit 8-bit 8-bit SFR01FFh − 0100h 0FFh − 010h 0Fh − 00h01FFh − 0100h 0FFh − 010h 0Fh − 00h01FFh − 0100h 0FFh − 010h 0Fh − 00hbootstrap loader (BSL)The MSP430 bootstrap loader (BSL) enables users to program the flash memory or RAM using a UART serial interface. Access to the MSP430 memory via the BSL is protected by user-defined password. For complete description of the features of the BSL and its implementation, see the Application report Features of the MSP430Bootstrap Loader , Literature Number SLAA089.BSL Function PM Package PinsData Transmit 53 - P1.0Data Receive52 - P1.1flash memoryThe flash memory can be programmed via the JTAG port, the bootstrap loader, or in-system by the CPU. The CPU can perform single-byte and single-word writes to the flash memory. Features of the flash memory include:D Flash memory has n segments of main memory and two segments of information memory (A and B) of128 bytes each. Each segment in main memory is 512 bytes in size.D Segments 0 to n may be erased in one step, or each segment may be individually erased.D Segments A and B can be erased individually, or as a group with segments 0−n.Segments A and B are also called information memory.D New devices may have some bytes programmed in the information memory (needed for test duringmanufacturing). The user should perform an erase of the information memory prior to the first use.32KB Main MemoryInformation Memory0FFFFh0FA00h 0FE00h 0FDFFh0FC00h 0FBFFh0F9FFh08400h 083FFh 08200h 081FFh01000h010FFh08000h 01080h 0107Fh16KB0FFFFh0FA00h 0FE00h 0FDFFh 0FC00h 0FBFFh 0F9FFh0C400h 0C3FFh 0C200h 0C1FFh 01000h010FFh 0C000h 01080h 0107Fh 8KB0FFFFh 0FA00h 0FE00h 0FDFFh 0FC00h 0FBFFh 0F9FFh0E400h 0E3FFh 0E200h 0E1FFh 01000h010FFh 0E000h 01080h 0107FhperipheralsPeripherals are connected to the CPU through data, address, and control busses and can be handled using all instructions. For complete module descriptions, see the MSP430x4xx Family User’s Guide, TI literature number SLAU056.oscillator and system clockThe clock system in the MSP430F42x family of devices is supported by the FLL+ module that includes support for a 32768-Hz watch crystal oscillator, an internal digitally-controlled oscillator (DCO), and a high frequency crystal oscillator. The FLL+ clock module is designed to meet the requirements of both low system cost and low power consumption. The FLL+ features digital frequency locked loop (FLL) hardware that, in conjunction witha digital modulator, stabilizes the DCO frequency to a programmable multiple of the watch crystal frequency.The internal DCO provides a fast turn-on clock source and stabilizes in less than 6 μs. The FLL+ module provides the following clock signals:D Auxiliary clock (ACLK), sourced from a 32768-Hz watch crystal or a high frequency crystal.D Main clock (MCLK), the system clock used by the CPU.D Sub-Main clock (SMCLK), the sub-system clock used by the peripheral modules.D ACLK/n, the buffered output of ACLK, ACLK/2, ACLK/4, or ACLK/8.brownout, supply voltage supervisorThe brownout circuit is implemented to provide the proper internal reset signal to the device during power on and power off. The supply voltage supervisor (SVS) circuitry detects if the supply voltage drops below a user selectable level and supports both supply voltage supervision (the device is automatically reset) and supply voltage monitoring (SVM, the device is not automatically reset).The CPU begins code execution after the brownout circuit releases the device reset. However, V CC may not have ramped to V CC(min) at that time. The user must insure the default FLL+ settings are not changed until V CC reaches V CC(min). If desired, the SVS circuit can be used to determine when V CC reaches V CC(min).digital I/OThere are two 8-bit I/O ports implemented—ports P1 and P2 (only six P2 I/O signals are available on external pins):D All individual I/O bits are independently programmable.D Any combination of input, output, and interrupt conditions is possible.D Edge-selectable interrupt input capability for all the eight bits of port P1 and six bits of P2.D Read/write access to port-control registers is supported by all instructions.NOTE:Six bits of port P2 (P2.0 to P2.5) are available on external pins, but all control and data bits for portP2 are implemented.Basic Timer1The Basic Timer1 has two independent 8-bit timers which can be cascaded to form a 16-bit timer/counter. Both timers can be read and written by software. The Basic Timer1 can be used to generate periodic interrupts and clock for the LCD module.LCD driveThe LCD driver generates the segment and common signals required to drive an LCD display. The LCD controller has dedicated data memory to hold segment drive information. Common and segment signals are generated as defined by the mode. Static, 2-MUX, 3-MUX, and 4-MUX LCDs are supported by this peripheral.WDT+ watchdog timerThe primary function of the watchdog timer (WDT+) module is to perform a controlled system restart after a software problem occurs. If the selected time interval expires, a system reset is generated. If the watchdog function is not needed in an application, the module can be configured as an interval timer and can generate interrupts at selected time intervals.timer_A3Timer_A3 is a 16-bit timer/counter with three capture/compare registers. Timer_A3 can support multiple capture/compares, PWM outputs, and interval timing. Timer_A3 also has extensive interrupt capabilities.Interrupts may be generated from the counter on overflow conditions and from each of the capture/compare registers.Timer_A3 Signal ConnectionsInput Pin Number Device Input Signal Module Input Name Module Block Module Output Signal Output Pin Number48 - P1.5TACLK TACLKACLK ACLKTimer NASMCLK SMCLK48 - P1.5TACLK INCLK53 - P1.0TA0CCI0A53 - P1.052 - P1.1TA0CCI0BCCR0TA0DV SS GNDDV CC V CC51 - P1.2TA1CCI1A51 - P1.251 - P1.2TA1CCI1BCCR1TA1DV SS GNDDV CC V CC45 - P2.0TA2CCI2A45 - P2.0ACLK (internal)CCI2BCCR2TA2DV SS GNDDV CC V CCUSART0The MSP430F42x devices have one hardware universal synchronous/asynchronous receive transmit (USART0) peripheral module that is used for serial data communication. The USART supports synchronous SPI (3 or 4 pin) and asynchronous UART communication protocols, using double-buffered transmit and receive channels.hardware multiplierThe multiplication operation is supported by a dedicated peripheral module. The module performs 1616, 168, 816, and 88 bit operations. The module is capable of supporting signed and unsigned multiplication as well as signed and unsigned multiply and accumulate operations. The result of an operation can be accessed immediately after the operands have been loaded into the peripheral registers. No additional clock cycles are required.SD16The SD16 module integrates three independent 16-bit sigma-delta A/D converters, internal temperature sensor and built-in voltage reference. Each channel is designed with a fully differential analog input pair and programmable gain amplifier input stage.peripheral file mapPERIPHERALS WITH WORD ACCESSWatchdog Watchdog Timer control WDTCTL0120hTimer_A3Timer_A interrupt vector TAIV012Eh _Timer_A control TACTL0160hCapture/compare control 0TACCTL00162hCapture/compare control 1TACCTL10164hCapture/compare control 2TACCTL20166hTimer_A register TAR0170hCapture/compare register 0TACCR00172hCapture/compare register 1TACCR10174hCapture/compare register 2TACCR20176h Hardware Multiplier Sum extend SUMEXT013EhpResult high word RESHI013ChResult low word RESLO013AhSecond operand OP20138hMultiply signed + accumulate/operand1MACS0136hMultiply + accumulate/operand1MAC0134hMultiply signed/operand1MPYS0132hMultiply unsigned/operand1MPY0130h Flash Flash control 3FCTL3012ChFlash control 2FCTL2012AhFlash control 1FCTL10128h SD16General Control SD16CTL0100h(see also: Peripherals with Byte Access)Channel 0 Control SD16CCTL00102hwith Byte Access)Channel 1 Control SD16CCTL10104hChannel 2 Control SD16CCTL20106hReserved0108hReserved010AhReserved010ChReserved010EhInterrupt vector word register SD16IV0110hChannel 0 conversion memory SD16MEM00112hChannel 1 conversion memory SD16MEM10114hChannel 2 conversion memory SD16MEM20116hReserved0118hReserved011AhReserved011ChReserved011Ehperipheral file map (continued)PERIPHERALS WITH BYTE ACCESSSD16Channel 0 Input Control SD16INCTL00B0h(see also: Peripherals with Word Access)Channel 1 Input Control SD16INCTL10B1hwith Word Access)Channel 2 Input Control SD16INCTL20B2hReserved0B3hReserved0B4hReserved0B5hReserved0B6hReserved0B7hChannel 0 preload SD16PRE00B8hChannel 1 preload SD16PRE10B9hChannel 2 preload SD16PRE20BAhReserved0BBhReserved0BChReserved0BDhReserved0BEhReserved0BFh LCD LCD memory 20LCDM200A4h:::LCD memory 16LCDM160A0hLCD memory 15LCDM1509Fh:::LCD memory 1LCDM1091hLCD control and mode LCDCTL090h USART0Transmit buffer U0TXBUF077hReceive buffer U0RXBUF076hBaud rate U0BR1075hBaud rate U0BR0074hModulation control U0MCTL073hReceive control U0RCTL072hTransmit control U0TCTL071hUSART control U0CTL070h Brownout, SVS SVS control register SVSCTL056h FLL+ Clock FLL+ Control1FLL_CTL1054hFLL+ Control0FLL_CTL0053hSystem clock frequency control SCFQCTL052hSystem clock frequency integrator SCFI1051hSystem clock frequency integrator SCFI0050h Basic Timer1BT counter2BTCNT2047hBT counter1BTCNT1046hBT control BTCTL040hperipheral file map (continued)PERIPHERALS WITH BYTE ACCESS (CONTINUED)Port P2Port P2 selection P2SEL02EhPort P2 interrupt enable P2IE02DhPort P2 interrupt-edge select P2IES02ChPort P2 interrupt flag P2IFG02BhPort P2 direction P2DIR02AhPort P2 output P2OUT029hPort P2 input P2IN028h Port P1Port P1 selection P1SEL026hPort P1 interrupt enable P1IE025hPort P1 interrupt-edge select P1IES024hPort P1 interrupt flag P1IFG023hPort P1 direction P1DIR022hPort P1 output P1OUT021hPort P1 input P1IN020h pSpecial Functions SFR module enable 2ME2005hSFR module enable 1ME1004hSFR interrupt flag 2IFG2003hSFR interrupt flag 1IFG1002hSFR interrupt enable2IE2001hSFR interrupt enable1IE1000habsolute maximum ratings †Voltage applied at V CC to V SS −0.3 V to + 4.1 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Voltage applied to any pin (see Note 1) −0.3 V to V CC + 0.3 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Diode current at any device terminal . ±2 mA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Storage temperature (unprogrammed device) −55°C to 150°C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Storage temperature (programmed device) −40°C to 85°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . †Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.NOTE 1:All voltages referenced to V SS . The JTAG fuse-blow voltage, V FB , is allowed to exceed the absolute maximum rating. The voltage isapplied to the TDI/TCLK pin when blowing the JTAG fuse.recommended operating conditionsPARAMETERMIN NOMMAX UNITS Supply voltage during program execution; SD16 disabled. V CC (AV CC = DV CC = V CC ) (see Note 1)MSP430F42x 1.8 3.6V Supply voltage during program execution; SD16 disabled, SVS enabled, and PORON = 1. V CC (AV CC = DV CC = V CC ) (see Note 1 and Note 2)MSP430F42x 2.0 3.6V Supply voltage during program execution; SD16 enabled orduring programming of flash memory. V CC (AV CC = DV CC = V CC )MSP430F42x2.73.6V Supply voltage, V SS (AV SS = DV SS = V SS )00V Operating free-air temperature range, TAMSP430F42x −4085°C LF selected, XTS_FLL=0Watch crystal 32768Hz XT1 selected, XTS_FLL=1Ceramic resonator 4508000kHz LFXT1 crystal frequency, f (LFXT1) (see Note 3)XT1 selected, XTS_FLL=1Crystal 10008000kHz Processor frequency (signal MCLK)f V CC = 1.8 V DC 4.15Processor frequency (signal MCLK), f(System)V CC = 3.6 VDC8MHzNOTES: 1.It is recommended to power AV CC and DV CC from the same source. A maximum difference of 0.3 V between AV CC and DV CC canbe tolerated during power up and operation.2.The minimum operating supply voltage is defined according to the trip point where POR is going active by decreasing supply voltage.POR is going inactive when the supply voltage is raised above minimum supply voltage plus the hysteresis of the SVS circuitry.3.The LFXT1 oscillator in LF-mode requires a watch crystal.f (MHz)1.8 V 3.6 V2.7 V 3 V 4.15 MHz8 MHzV CC − Supply Voltage − Vf S y s t e m − M a x i m u m P r o c e s s o r F r e q u e n c y − M H z6 MHzFigure 1. Frequency vs Supply Voltage。