基于ADAMS的大壁虎地面爬行仿真
机床爬行机理研究及ADAMS运动仿真参数分析
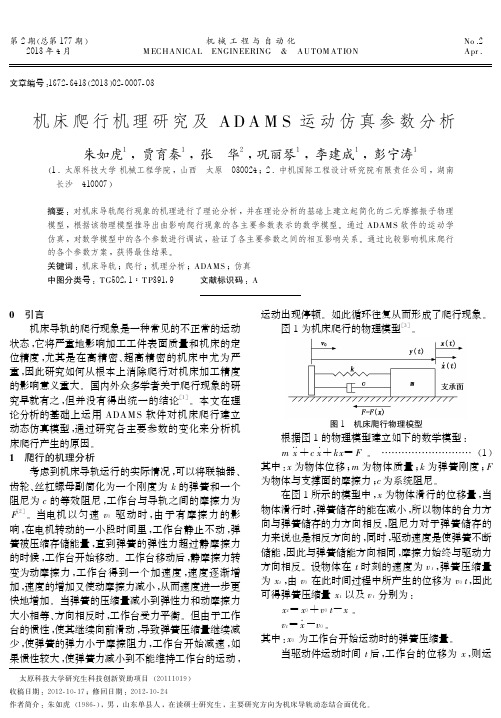
第2期(总第177期)2013年4月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.2Apr.文章编号:1672‐6413(2013)02‐0007‐03机床爬行机理研究及ADAMS运动仿真参数分析朱如虎1,贾育秦1,张 华2,巩丽琴1,李建成1,彭宁涛1(1.太原科技大学机械工程学院,山西 太原 030024;2.中机国际工程设计研究院有限责任公司,湖南 长沙 410007)摘要:对机床导轨爬行现象的机理进行了理论分析,并在理论分析的基础上建立起简化的二元摩擦振子物理模型,根据该物理模型推导出由影响爬行现象的各主要参数表示的数学模型。
通过ADAMS软件的运动学仿真,对数学模型中的各个参数进行调试,验证了各主要参数之间的相互影响关系。
通过比较影响机床爬行的各个参数方案,获得最佳结果。
关键词:机床导轨;爬行;机理分析;ADAMS;仿真中图分类号:TG502畅1∶TP391畅9 文献标识码:A太原科技大学研究生科技创新资助项目(20111019)收稿日期:2012‐10‐17;修回日期:2012‐10‐24作者简介:朱如虎(1986‐),男,山东单县人,在读硕士研究生,主要研究方向为机床导轨动态结合面优化。
0 引言机床导轨的爬行现象是一种常见的不正常的运动状态,它将严重地影响加工工件表面质量和机床的定位精度,尤其是在高精密、超高精密的机床中尤为严重,因此研究如何从根本上消除爬行对机床加工精度的影响意义重大。
国内外众多学者关于爬行现象的研究早就有之,但并没有得出统一的结论[1]。
本文在理论分析的基础上运用ADAMS软件对机床爬行建立动态仿真模型,通过研究各主要参数的变化来分析机床爬行产生的原因。
1 爬行的机理分析考虑到机床导轨运行的实际情况,可以将联轴器、齿轮、丝杠螺母副简化为一个刚度为k的弹簧和一个阻尼为c的等效阻尼,工作台与导轨之间的摩擦力为F[2]。
当电机以匀速v0驱动时,由于有摩擦力的影响,在电机转动的一小段时间里,工作台静止不动,弹簧被压缩存储能量,直到弹簧的弹性力超过静摩擦力的时候,工作台开始移动。
仿壁虎机器人地壁过渡步态规划与运动仿真

L I He . y a n .GUAN Ya n g
( 1 . N a t i o n a l K e y L a b o r a t o r y o f V e h i c u l a r T r a n s mi s s i o n ,B e i j i n g I n s t i t u t e o f T e c h n o l o g y , B e i j i n g 1 0 0 0 8 1 , C h i n a ;
2 . S c h o o l o f Me c h a n i c a l a n d V e h i c u l a r E n g i n e e r i n g ,B e i j i n g I n s t i t u t e o f T e c h n o l o y, g B e i j i n g 1 0 0 0 8 1 ,C h i n a )
摘要: 针对传统仿壁 虎机器人 空间运动能力不足 、 空 间运动 步态 方法 的可 行性 问题 , 基 于仿生学原 理 , 设 计 了一种具有腰 关节 的每
条腿具有 三个 自由度的四足仿壁虎机器人 , 对仿壁虎机器人 的结构进 行了正运 动学和逆 运动学 的分析 , 建立 了各关节 角度和 机身
关键 词 : 仿壁 虎机器 人 ; 地壁过渡 ; 步态规划
中图分类号 : T H1 1 2 ; T P 2 4 文献标 志码 : A 文章编号 : 1 0 0 1 — 4 5 5 1 ( 2 0 1 6 ) 1 2—1 4 2 8— 0 9
Ga i t p l a n n i ng a n d s i mu l a t i n g o f g e c k o - mi mi c k i n g r o b o t
Adams动力学仿真分析的详细步骤
1、将三维模型导出成parasolid格式,在adams中导入parasolid格式的模型,并进行保存。
2、检查并修改系统的设置,主要检查单位制和重力加速度。
3、修改零件名称(能极大地方便后续操作)、材料和颜色.首先在模型界面,使用线框图来修改零件名称和材料。
然后,使用view part only来修改零件的颜色。
4、添加运动副和驱动.注意:1)添加运动副时,要留意构件的选择顺序,是第一个构件相对于第二个构件运动。
2)对于要添加驱动的运动副,当使用垂直于网格来确定运动副的方向时,一定要注意视图定向是否对,使用右手法则进行判断。
若视图定向错了,运动方向就错了,驱动函数要取负。
3)添加运动副时,应尽量使用零件的质心点,此时也应检查零件的质心点是否在其中心。
4)因为在仿真中经常要修改驱动函数,所以应为驱动取一个有意义的名称,一般旋转驱动取为:零件名称_MR1,平移驱动取为:零件名称_MT1。
5)运动副数目很多,且后面用的比较少,所以运动副的名称可以不做修改。
对于要添加驱动的运动副,在添加运动副后,应马上添加驱动,以免搞错.6)添加完运动副和驱动后,应对其进行检查。
使用数据库导航器检查运动副和驱动的名称、类型和数量,使用verify model检查自由度的数目,此时要逐个零件进行自由度的检查和计算。
7)进行初步仿真,再次对之前的工作进行验证。
因为添加了材料,有重力,但没有定义接触,此时模型会在重力的作用下下掉。
若没问题,则进行保存。
5、添加载荷.6、修改驱动函数.一般使用速度进行定义,旋转驱动记得加d。
7、仿真。
先进行静平衡计算,再进行动力学计算。
8、后处理。
具体步骤如下:1)新建图纸,选择data,添加曲线,修改legend。
一般需要线位移,线速度,垂直轮压和水平侧向力的曲线。
2)分析验证,判断仿真结果的正确性(变化规律是否对,关键数值是否对)。
3)截图保存,得出仿真分析结论.。
基于Adams的走行机构动态性能仿真分析
作 者 简 介 :张 守 云 ( 1 9 7 6 一) , 男, 河 南 滑 县人 , 工程 师 , 硕 士 研 究生 , 研 究 方 向 为 工 程 结 构 及 机 构 仿 真 分析 与优 化 ,
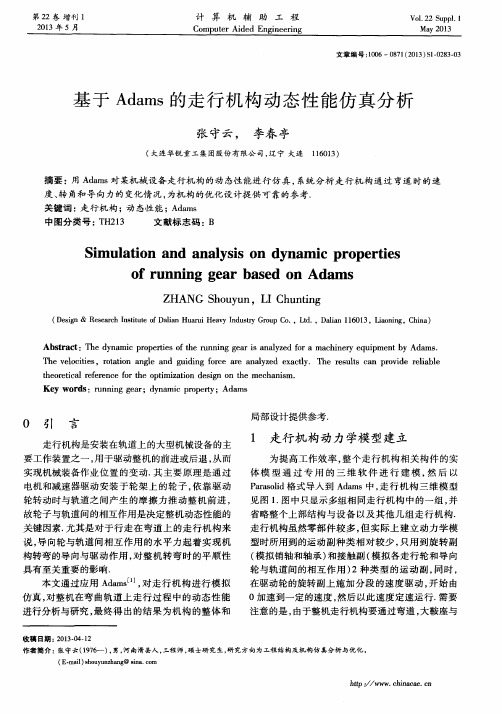
本文通 过应 用 A d a ms …, 对 走 行 机 构进 行 模 拟 仿真 , 对 整机 在弯 曲轨 道 上走 行 过 程 中 的动 态性 能 进 行分 析 与研究 , 最 终 得 出的结 果 为 机 构 的 整体 和
收 稿 日期 : 2 0 1 3 — 0 4 - 1 2
在 驱动 轮 的旋转 副 上施 加 分 段 的速 度 驱 动 , 开始 由 0加速 到一 定 的速度 , 然后 以此 速度 定 速 运行 . 需 要 注 意 的是 , 由于整 机走 行机 构要 通过 弯道 , 大鞍 座 与
Abs t r a c t:T h e d y n a mi c p r o p e r t i e s o f t h e r u n n i n g g e a r i s a n a l y z e d f o r a ma c h i n e r y e q u i p me n t b y Ad a ms . T he v e l o c i t i e s,r o t a t i o n a ng l e a n d g u i d i ng f o r c e a r e a n a l y z e d e x a c t l y . Th e r e s ul t s c a n p r o v i d e r e l i a b l e
0 引 言
走 行机 构是 安装 在轨 道上 的大 型机械 设备 的主 要 工作 装置 之一 , 用 于驱 动整机 的前 进或 后退 , 从而 实 现机 械装备 作 业位 置 的变 动 . 其 主 要 原 理 是通 过
基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真的开题报告
基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真的开题报告一、选题背景及意义随着人类社会的发展和科技的进步,机器人技术已经成为了风头正劲的热门研究领域。
机器人的运动控制是机器人技术研究中一个非常重要的环节。
步态规划是机器人运动控制领域中的核心问题之一,不同的步态规划方法会对机器人的运动性能,如运动速度、运动稳定性和能耗等产生重要的影响。
虚拟样机技术是一种新型的机器人仿真技术,它可以帮助研究者预测机器人的动力学性能和运动稳定性,减少机器人研究中的试错成本和人工实验的工作量。
使用虚拟样机技术进行仿真可以有效地降低实验成本,并可以对机器人进行全局优化,提高机器人系统的整体性能。
壁虎机器人是一种仿生机器人,它能够在任何平面上快速移动并爬行,因此在工业生产与人道救援等领域拥有广泛的应用前景。
目前,壁虎机器人的运动控制还面临诸多挑战,如运动速度、稳定性和能耗等方面的限制。
因此,对于壁虎机器人进行步态规划和运动仿真研究具有重要意义。
二、研究内容本课题主要研究基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真。
研究内容如下:1. 壁虎机器人建模:对壁虎机器人进行建模,使其在虚拟环境中能够进行完整的运动仿真实验。
2. 步态规划:设计、实现壁虎机器人的步态规划算法,并结合虚拟样机技术进行全局优化。
3. 运动仿真:利用虚拟样机技术进行壁虎机器人的运动仿真,通过仿真结果分析步态规划算法的效果。
4. 系统优化:针对壁虎机器人在运动速度、稳定性和能耗等方面存在的问题,对系统进行优化。
三、研究方法本课题主要采用以下研究方法:1. 虚拟样机技术:使用虚拟样机技术对壁虎机器人进行建模和运动仿真,避免了大量的试验成本,提高了试验效率。
2. 步态规划算法:设计、实现壁虎机器人的步态规划算法,结合虚拟样机技术进行全局优化,提高步态规划算法的效果。
3. 系统优化:针对壁虎机器人的运动速度、稳定性和能耗等问题,对系统进行优化,提高系统的整体性能。
用于gis设备内部爬行的仿壁虎机器人设计

1 壁虎机器人的设计
1.1 壁虎机器人整体的设计
图1
仿壁虎爬壁机器人控制系统硬件设计由远程控制器
控制系统的 3 块控制器
基金项目: 气体绝缘金属封闭开关内部检测壁虎机器人研发及应用 (编号:GZHKJXM20170068)
收稿日期:2019-06-14
·138·
林李波,等:用于 GIS 设备内部爬行的仿壁虎机器人设计
部空间的特点,本文提供一种仿壁虎四足爬壁机器人以及
机器人配套的控制系统,设计一款适合在气体绝缘金属封
闭开关内部空间作业的具有较高实用性的机器人。该机器
人具有体积小,结构紧凑,具有空间运动能力,四足末端
对爬行壁面的贴合良好等特点。控制系统采用 stm32 单片
机为硬件平台,移植开源的 FreeRTOS 实时控制系统,具
pipe wall.
Key words: bionicrobot;gecko;hardwaredesign;softwaredesign;gaitanalysis
0 引言
随着六氟化硫封闭式组合电器逐渐成为电力系统的主
流变电设备,变电站气体绝缘金属封闭开关内部的检修和
清洁也日渐重要,成为日常运维的重点项目。急需一种变
1.2 壁虎机器人本体机械结构的设计
(AXUC) 能够配合机载运动控制器 (RC) 实现机器人的
[3]
通过对壁虎的身体结构和运动规律的研究 ,研制了
一种带有真空吸附脚掌的四足仿壁虎机器人,其结构简图
和三维建模示意图如图 2 所示。该机器人的腿部采用完全
(MC)、机载运动控制器 (RC) 和辅助运动控制器 (AX⁃
UC) 构成,3 块控制器之间通过无线通信实现指令控制和
基于ADAMS的仿壁虎爬壁机器人的运动仿真
基金项目:国家自然科学基金项目(90407018)收稿日期:2006-08-22 修回日期:2006-08-23 第24卷 第9期计 算 机 仿 真2007年9月 文章编号:1006-9348(2007)09-0133-04基于ADA M S 的仿壁虎爬壁机器人的运动仿真孙丽红1,2,汪小华1,梅涛1,吕晓庆1,2(1.中国科学院合肥智能机械研究所,安徽合肥230031; 2.中国科学技术大学,安徽合肥230026)摘要:为实现在不同环境的壁面上自由爬行,设计了应用仿壁虎微纳米粘附阵列的爬壁机器人,建立了机器人的动力学模型及足部与壁面之间的接触模型,并利用机械系统动力学软件ADAMS 的仿真功能,对机器人沿垂直壁面爬行的运动特性进行了仿真。
利用ADAMS 的后处理模块的分析功能,重点研究了在一个运动周期内,模型整体质心的位移、电机转矩以及足部与壁面之间的接触力随时间的变化情况。
仿真结果表明该仿壁虎爬壁机器人能够以约26mm /s 的速度沿着垂直的壁面平稳地运动,不存在波动和偏离。
这为下一步研制仿壁虎爬壁机器人的物理样机提供了理论指导,也为其他仿生机器人的研究提供了参考。
关键词:仿壁虎;爬壁机器人;仿真;粘附阵列中图分类号:TP39 文献标识码:AS i m ul a ti on of Gecko I n sp i red C li m b i n g Robot Ba sed on ADAM SS UN L i -hong 1,2,WANG Xiao -hua 1,M E I Tao 1,LU Xiao -qing1,2(1.I nstitute of I ntelligentMachines,Chinese Acade my of Sciences,Hefei Anhui 230031,China;2.University of Science and Technol ogy of China,Hefei Anhui 230026,China )ABSTRACT:I n this paper a gecko ins p ired cli m bing r obot using the m icr o /nano adhesi on array was designed t o a 2dap t walls in different envir on ment .The dyna m ics model and contact model bet w een the feet and the walls were given out .The cli m bing behavi or of the r obot al ong the vertical walls was si m ulated using dyna m ics s oft w are ADAMS .The change of the dis p lace ment of centr oid of the model ,the t orque of electr omot or and the contact force bet w een the feet and the walls with ti m e in a peri od were e mphatically analyzed .The result indicated that the r obot could move al ong the vertical walls with a s peed of about 26mm /swithout fluctuati on and deviati on .It p r ovided references f or the future design of the gecko ins p ired cli m bing r obot p r ot otypes and the study of other kind of bi ol ogical modeling r obot .KE YWO RD S:Gecko ins p ired;W all -cli m bing r obot;Si m ulati on;Adhesi on array1 引言仿壁虎爬壁机器人就是模仿自然界中壁虎的精巧结构、运动原理和行为方式的机器人系统。
基于ADAMS软件仿真虚拟样机的模型建立

长方体为实体1
球为实体1
相交两实体操作过程 选择图标
按照屏幕下方状态栏的提示,用鼠标 选取实体1。
按照屏幕下方状态栏的提示, 用鼠标选取实体2。实体1和 实体2相交以后成的形体取 实体1的名称。
长方体为实体1
球为实体1
几何体线连接操作过程 选择图标
按照屏幕下方状态栏的提示,用鼠标 选取线1。
样条线
点
标志点
圆
折线
折线绘制过程 选择图标
下 方 状 态 栏 设 置
封闭否
新零件 添加到一零件上
添加到地上 折线 一条线
线的参数设置
注意事项:
几何形体没有质量,绘制完成后出现提示对话框,关闭即可; 一般作为辅助建模工具,在复杂模型剪完后一定删除,否则影响仿真分析。
几何形体剪完后的提示信息
2、简单形体几何建模
④ Ok退出,即完成零件的物性修改,其它零件类推。
5)模型建立导入完毕。
三、实例操作分析 简 易 起 重 机 的 建 模
利用adams自身建模工具完成
装 载 机 工 作 装 置 建 模
利用其它CAD建模然后导入ADAMS完成
本讲小结:
本次课主要介绍基于ADAMS仿真软件的机械系统样机 的模型建立,先从单个零部件的模型建立介绍到系统的 样机建立以及位置的调整和参数的修改;并详细介绍了 ADAMS软件在建立模型时与其它三维CAD 软件的转换。
一、Adams自身建模工具建立模型 简单零部件的模型绘制; 复杂零部件的模型建立。 两者均利用Adams建模工具
Adams 建 模 工 具
点线绘制 实体绘制
布尔操作 特征修饰
参数设置
简 单 模 型 建 立
复 杂 图 形 创 建
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ξ 收稿日期:2008-12-21基金项目:江苏省普通高校研究生科研创新计划资助项目(CX 08B -044Z ).作者简介:武昌耀(1982—),男,山西平遥人,硕士研究生,主要从事计算机辅助工程(C AE )研究.基于ADAMS 的大壁虎地面爬行仿真Ξ武昌耀,陶秋帆,郝青青(南京航空航天大学航空宇航学院,南京 210016)摘要:为研究大壁虎在水平壁面上的爬行,建立了壁虎的多体系统动力学模型及脚掌与壁面之间的接触模型,并利用机械系统动力学软件ADAMS ,对其在水平壁面上爬行的运动特性进行了仿真,得到了在对脚着地的半个周期内,壁虎模型整体质心的位移、各关节间角度、脚掌与壁面之间接触力及关节提供的转矩随时间的变化情况,为进一步研究壁虎在不同表面的爬行规律提供了参考,也为研制仿壁虎爬壁机器人的物理样机提供了理论依据.关 键 词:大壁虎;运动学;动力学中图分类号:TP391.9 文献标识码:A文章编号:1671-0924(2009)03-0028-06Simulation of G ecko G round Cra w l B ased on ADAMSWU Chang 2yao ,T AO Qiu 2fan ,HAO Qing 2qing(Nanjing University of Aeronautics and Astronautics ,Nanjing 210016,China )Abstract :In order to study the crawl of a gecko on horizontal surface ,the dynamics m odel and contact m odel between the feet and the ground are built.The kinematic characteristics of the crawling behavior of the gecko along the ground level are simulated using dynamics s oftware ADAMS.The change of the dis 2placement of centroid of the m odel ,angles between joints ,torques of joints and the contact force between the feet and the walls with time in a half period are em phatically analyzed.The result indicates that the m odel could m ove stably along the ground level.The change of the contact force is close to the experiment result.The study provides references for the research on the rule of gecko sprawl on different surfaces and the design of the gecko inspired climbing robot prototypes.K ey w ords :gecko ;kinematics ;dynamics 大壁虎是一种可在地面、陡壁、天花板等不同平面上自由灵活运动的四足动物,它超凡的运动能力成为特种机器人研制和仿生的对象[1-2].研究壁虎的运动规律、各个关节处的力矩及脚掌与壁面之间的接触力,对分析它的运动特性、仿生机械壁虎的结构设计及关节驱动控制等具有重要的指导意义.陈振坤和丁光[3-4]从解剖学的角度对壁虎的骨骼、关节、附肢肌等进行了研究.肖世旭等[5-6]对大壁虎的运动步态进行了研究.本文中确定了第23卷 第3期V ol.23 N o.3重庆工学院学报(自然科学)Journal of Chongqing Institute of T echnology (Natural Science )2009年3月Mar.2009壁虎模型的组成部分,包括部件、约束和几何外形,取得模型各个部分的空间方位、几何及运动参数等数据并组装模型,对模型添加约束和运动.采用美国MDI 公司开发的机械系统动力学软件ADAMS 的仿真功能,根据分析目的不同,建立对应的模型进行了运动学和动力学分析.1 壁虎计算模型的建立1.1 壁虎的结构分析大壁虎的骨骼系统为对称结构,按其部位分为中轴骨和附肢骨.壁虎的主要关节肩(髋)关节,连接大腿和身体,可以做外展、内收和弯曲伸展;肘(膝)关节连接大、小腿之间,可以做屈伸运动;腕(踝)关节连接脚掌和小腿,可以做3个方向的随动旋转运动.大壁虎骨骼系统见图1.图1 大壁虎的骨骼系统及主要关节示意图1.2 壁虎几何、质量参数戴振东等对一只体重90g 的大壁虎的身体各部分质量进行了测量,其中头部、躯干和尾部共75.73g ,前后大腿分别重1.017g 和2.568g ,前后小腿分别重0.824g 和1.194g ,脚掌为0.6777g.运用反求图像的方法测量其外形和结构尺寸,该壁虎全身长310mm ,尾部148mm ,测量数据如下图2所示.图2 大壁虎主要几何尺寸示意图1.3 建模假设壁虎是一个多自由度柔性体系,运动形态多种多样,且其关节内粘滞力无法确定,建立其柔体模型非常困难.为简化问题,在研究中采用2条假设:壁虎的各部分被认为是质量均匀分布的刚体;除与地面接触的脚掌外,各关节内部不计摩擦.1.4 模型建立利用ADAMS 2005的基本模块ADAMS/View 中的建模工具,根据测得的相关参数,建立壁虎的三维多刚体模型.模型采用左右对称结构,整个模型包括身体和四肢两大部分.身体(包括头部、躯干、尾部)为一个刚体,每一前肢(或后肢)由大腿、小腿、脚掌3个刚体组成.为了添加约束方便,在大腿和身体之间,建立一个不计质量的过渡刚体.根据对壁虎身体的结构分析以及壁虎的实际运动情况,在壁虎模型刚体之间创建约束副,保证模型中有相对运动的刚体能按照壁虎真实运动的方式运动.躯干、过渡刚体、大腿、小腿之间用旋转副约束以实现壁虎的抬腿和前进动作;脚掌和小腿之间用球铰副约束以实现壁虎爬行过程中脚掌的随动.其中,过渡刚体处2个旋转副的转轴方向是根据肩(髋)、肘(膝)关节的关节点空间位置来确定.而在壁虎运动过程中,肩(髋)关节不能做旋内、旋外运动,躯干、过渡刚体和大腿之间不能用球铰副来约束.建立一个比较简单的水平面表示壁虎的运动环境并添加重力场,方向与地面垂直.根据分析类型的不同,壁虎的足部与大地之间用固定绞或接触力属性定义.整个模型共17个刚体,14个自由度,如图3所示.图3 在ADAMS/View 下建立的加约束和运动的壁虎仿真模型92武昌耀,等:基于ADAMS 的大壁虎地面爬行仿真 模型中各约束副的名称和位置如图4所示.其中:字母z 表示左边,y 表示右边;字母q 表示前面(上肢),h 表示后面(下肢);字母组合sph 表示小腿与脚掌之间的球铰副;字母j 表示铰,即约束副;数字1表示过渡刚体与躯干之间的旋转副;数字2表示大腿与过渡刚体之间的旋转副;数字3表示小腿与大腿之间的旋转副.例如,zqj -2表示左前大腿与过渡刚体间旋转副,yhj -sph 表示右后小腿与脚掌间球铰副.图4 模型约束副的名称和位置示意图2 运动学仿真 壁虎一条腿的运动在一个运动周期内可以分为支撑和摆动2个阶段,当一条前腿和对侧的后腿处于支撑阶段时,另一对前后腿处于摆动阶段,交替一次后完成一个运动周期,如图5所示.图5 大壁虎爬行步态周期 壁虎身体是左右对称结构,只需研究一对对侧的前后腿处于支撑阶段,另一对对侧的前后腿处于摆动阶段的半个周期的情况.本文中研究左前腿和右后腿处于支撑状态,右前腿和左后腿处于摆动状态的半个周期.2.1 第1种运动学仿真壁虎躯干质心的运动规律比较容易通过实验来测定,也比较准确,而各个关节间的夹角随时间的变化规律很难准确测量.所以,以躯干运动作为驱动,可以通过计算得到各关节的角位移曲线.将两条支撑腿的脚掌固定在地面上,根据实验测得的真实壁虎的爬行速度,给身体施加一个理想的y 方向(前进方向)匀速直线运动,把x 方向(横向)、z 方向(铅垂方向)位移,以及绕x ,y ,z 3个方向的转动位移设为0.计算得到对脚步态下支撑腿各运动副的角位移曲线,并与实验数据[6-7]进行对比.改变躯干运动方式,经过多次仿真试验,找到合适的3个方向的运动规律,使得在躯干质心的驱动规律与实验尽量吻合的前提下,支撑腿各关节的角位移曲线与实验数据最接近.图6是壁虎在水平地面爬行实验中各关节间角度随时间的变化曲线.图中系列1是大腿与身体间的水平夹角(xoy 平面)变化关系曲线,系列2是大腿和小腿间夹角变化关系曲线.图6 水平地面爬行实验中支撑腿各关节角度时间曲线 图7是计算得到的水平地面爬行时各关节间角度随时间的变化曲线.图7a )中曲线zq1,zq2,03重庆工学院学报zq3及图7b )中曲线yh1,yh2,yh3分别是仿真时左前腿约束副zqj -1,zqj -2,zqj -3和右后腿约束副yhj -1,yhj -2,yhj -3的角位移变化规律.图7 仿真得到的左前腿、右后腿的角度时间曲线 结果表明,当模型质心x 方向位移幅度为3mm ,y 方向运动速度为320mm/s ,z 方向位移幅度为1mm 时,支撑腿关节的6个角位移变化曲线与实验结果比较接近.由计算得到的图7中左前腿、右后腿的大、小腿间夹角先减小后增加,与实验得到的图6中a )、b )对应时间段(328~508ms )变化趋势相同,变化幅度相近;图7中大腿与身体的水平夹角(xoy 平面)变化趋势与图6中相同,变化幅度也比较接近.由此可知,建立的大壁虎的计算模型是合理的.2.2 第2种运动学仿真将在上述运动学仿真中得到的6条角位移曲线作驱动输入对应的运动约束副,计算身体质心的运动,以验证这样的驱动是否与实验得到的壁虎的运动相一致.仿真计算后,测出壁虎身体的质心在x ,y ,z 3个方向上的位移变化曲线,如图8所示.其中,实线为x 方向位移,点划线为y 方向位移,虚线为z 方向位移.图8 壁虎身体的质心在x ,y ,z 3个方向上的位移变化曲线 由图8可以看出,在壁虎前进方向y 方向,质心的位移是一条直线,表明运动速度均匀、稳定;在侧向x 方向位移幅度为6mm ,与预期3mm 有一定偏差,在z 方向位移幅度为1mm ;质心在x ,z 方向的位移波动不大,运动平稳.在3个方向上的运动情况与预期相近.3 动力学分析 在ADAMS 动力学分析中,由于四条腿的每个运动关节都施加驱动,整个模型就必然存在干涉.为了消除模型干涉的影响,将支撑腿(左前腿与右后腿)的小腿与脚掌之间的球铰副约束换成弹性衬套(bushing )连接,以产生小的位移.设置弹性衬套参数,再根据壁虎的实际运动情况,给壁虎的摆动腿(右前腿和左后腿)的关节施加驱动,实现模型的四腿运动,并进行动力学仿真分析.3.1 支撑腿脚掌与地面间三维接触力分析动力学仿真后,得出壁虎模型左前脚、右后脚脚掌与小腿间衬套力(此力和脚掌与地面之间的接触力大小相等)随时间的变化关系,并与南京航空航天大学仿生结构与材料研究所的实验结果进行比较.调整弹性衬套参数设置,进行多次仿真试验,使得计算得到的脚掌与地面间的三维接触力数值与实验结果接近.原来的球铰副连接提供3个方向的旋转自由度.bushing 有6个参数,把3个旋转方向的刚度和阻尼设小,就可实现原有球副的功能.弹性衬套参数的设置如表1所示.13武昌耀,等:基于ADAMS 的大壁虎地面爬行仿真表1 脚掌与地面间三维力设置bushing propertiesxyzT ranslationalS tiffness/(N ・mm -1)0.0050.0050.01Dam ping/(N ・s ・mm -1)0.020.030.05Preload/N 0R otationalS tiffness/(N ・mm -1)2.96E -10 2.96E -10 2.96E -10Dam ping/(N ・s ・mm -1)7.5E -117.5E -117.5E -11Preload/N 仿真后得到的支撑腿脚掌与地面间的接触力在x ,y ,z 3个方向上随时间变化的曲线如图9所示.图9 计算得到的左前、右后脚掌与地面间的三维接触力时间曲线 由图8可以看出,在0~0.02s 仿真初始阶段和0.16~0.18s 仿真将要结束阶段,大壁虎模型的脚掌与地面之间在x ,y 方向的摩擦力以及在z 方向的支撑力数值都比较大,并伴随有不同程度的起伏,这是因为模型整体在0~0.02s 处于加速阶段,在0.16~0.18s 处于减速阶段,驱动是由STEP 函数拟合的,各刚体的加速度较大所致.在0.02~0.16s 的运动过程中,由图b )可知,在运动的主方向y 向,左前脚、右后脚脚掌所受摩擦力数值大小大多数时间处于100~200mN ,只有在0.08s 附近,曲线大于200mN ,与实验结果值相符.在运动前期,左前脚掌受到向前的摩擦力,右后脚掌受到向后的摩擦力;在运动后期,左前脚掌受到向后的摩擦力,右后脚掌受到向前的摩擦力;这与壁虎小腿及脚掌的运动趋势一致,是合理的,但在实验结果中未能体现,原因可能是实验的方法和精度还有待改进.总的y 方向受到的摩擦力,在运动前期,先沿y 正向后沿y 负向,壁虎的质心沿y 方向先快速加速后缓慢减速运动;在运动后期,摩擦力方向先沿y 正向后沿y 负向,壁虎的质心沿y 方向先缓慢加速再快速减速运动;这与预期的质心在y 方向上的速度、加速度的变化规律相一致,符合大壁虎爬行交换支撑腿时的壁虎身体的实际运动情况.在z 向,始终受到来自地面的支撑力,数值与重力值接近,符合实际.在运动的初始和结束阶段,各运动刚体的加速度较大,导致在计算中,接触力的数值比较大.后续支撑腿关节的驱动力矩(如图10)的数值比较大,也是因为初始和结束时各刚体的加速度较大.这与壁虎的实际运动情况不符,其原因是模型身体质心的驱动与壁虎真实运动情况有一定的差别,驱动函数的设计有待进一步的改进.3.2 支撑腿关节驱动力矩分析壁虎各关节运动副的驱动力矩与在其转轴上所受的力矩大小相等,方向相反.动力学仿真后,计算出支撑腿各关节所受的力矩,在ADAMS/View后处理模块中对其进行分析处理,得到各运动副在其转轴上所受的力矩,最后得到支撑腿各关节运动副提供的驱动力矩,如图10所示.23重庆工学院学报图10 支撑腿关节提供的驱动力矩时间曲线 由图10可知,支撑腿关节的驱动力矩的数值在0~0.02s和0.16~0.18s比较大,并伴有明显的起伏,这是因为在第1种运动学仿真中,身体质心的速度驱动是由STEP函数拟合的,故各刚体初始和结束时的角加速度较大.在0.02~0.16s的运动过程中,运动副zqj-1和yhj-1的驱动力矩数值,相比其他运动副的比较大,在0.16s和0.08s时达到最大值7N・mm;运动副zqj-2和yhj-2的驱动力矩数值比较小,其中zqj-2的最大为1.6N・mm,yhj-2的最大值仅有0.3N・mm;相对而言,运动副zqj-3和yhj-3的驱动力矩数值处于中等,zqj-3的最大只有3N・mm,而yhj-3的平均只有1N・mm左右.这是因为在整个运动过程中,模型的左前肩关节、右后髋关节处zqj-1和yhj-1两个运动副的角位移最大,变化幅度大概为120°;运动副zqj-3和yhj-3的角位移次之,运动幅度大概为65°;而运动副zqj-2的角位移为10°,yhj-2的转动幅度仅有4°.这与壁虎四肢各部分的实际运动情况及运动趋势的变化基本相符.4 结束语 在对壁虎模型进行运动学仿真后,将模型整体质心的位移、关节间角度的变化规律与实验结果进行对比,证明了模型结构是合理的,并找出了下一步建立动力学模型所需的关节驱动函数.在动力学仿真后,分析脚掌与壁面之间接触力随时间的变化规律,最后,得到壁虎在水平壁面上快速爬行各关节的驱动力矩随时间的变化规律.这为进一步研究壁虎在不同表面的爬行规律提供了方法参考,也为以后研制仿壁虎爬壁机器人的物理样机提供了理论依据.参考文献:[1] 戴振东,孙久荣.壁虎的运动及仿生研究进展[J].自然科学进展,2006,16(5):519-523.[2] 王田苗,孟,裴葆青,等.仿壁虎机器人研究综述[J].机器人,2007,5:290-297.[3] 陈振坤,丁光.大壁虎(G ecko gecko)骨骼系统的解剖[J].云南农业大学学报,1990,5:1-6.[4] 丁光,陈振坤.大壁虎(G ecko gecko)附肢肌的解剖[J].云南农业大学学报,1995,10:12-17.[5] 肖世旭.大壁虎的三维步态与实验[D].南京:南京航空航天大学,2006:16-20.[6] 成佳伟.大壁虎运动步态与体态特征研究[D].南京:南京航空航天大学,2007:15-19.[7] 洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999.[8] 郑建荣.ADAMS-虚拟样机技术入门与提高[M].北京:机械工业出版社,2003.(责任编辑 陈 松)33武昌耀,等:基于ADAMS的大壁虎地面爬行仿真 。