异步电机矢量控制仿真
异步电机矢量控制变频调速系统的Simulink仿真研究

理有一个更加 清晰的认 识 , 对矢量控制变 频调速系统的性能有更 加直观 的感受 。
良好 性 。
关键词 :矢量控制
Sm l k 变频调速 i ui n
仿真
[ 中图分类号 ]T 7 3 T 3 3 [ N 7 ;M 4' 文献标志码 ]A [ 文章编号 ]10 0 0—38 (0 1 0 04 0 8 6 2 1 ) 5— 0 8— 4
Si lt n S u y o h co n r l d Va ibe F e u n y mua i t d ft e Ve t rCo to l r l r q e c o e a Dr e o V c r n u c ie Ba e n Si uik i s f rAs n h O O s Ma h n s d o m l v n
摘
要 :在分析异 步电机矢量控制原理和矢量控制变频调速 系统 结构的基础上 , 利用 Sm l k和 P B工具箱 中的库 元件 , 立 了异步 iui n S 建 电机矢量控制调速 系统 的仿真模型并进行 了仿 真实验 。仿真结果验证 了该 模型 的有效性和 矢量控制 调速系统 动静 态性能 的
We X a g n i inl i Z o iu N n n a h uQh a igj b o u .
( . ol e fEetcl n nom t nE gneig L nh u U i rt eh ooy L nh uG nu7 0 5 , hn ; 1 C lg l r a dI r ai n i r ,a z o n e i o Tcn l , a zo a s 3 0 0 C ia e o ci a f o e n v syf g 2 K yL brtr dacdC nrl o uta rc s nG nuP oi eL nh u G nu7 0 5 ,C ia . e aoao o vne ot fr n s l oe a s rv c , z o a s 3 0 0 hn ; y fA o I d r P si i n a
运动控制系统课程设计异步电机矢量控制Matlab仿真实验
目录1 异步电动机矢量控制原理 (2)2 坐标变换 (3)2.1 坐标变换基本思路 (3)2.2 三相——两相坐标系变换(3/2变换) (4)2.3 旋转变换 (5)3 转子磁链计算 (6)4 矢量控制系统设计 (7)4.1 矢量控制系统的电流闭环控制方式思想 (7)4.2 MATLAB系统仿真系统设计 (8)4.3 PI调节器设计 (9)5 仿真结果 (10)5.1 电机定子侧的电流仿真结果 (10)5.2 电机输出转矩仿真结果 (11)心得体会 (13)参考文献 (14)异步电机矢量控制Matlab 仿真实验1 异步电动机矢量控制原理矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1-1所示,在三相坐标系上的定子交流电流i A 、i B 、i C ,通过3/2变换可以等效成两相静止正交坐标系上的交流i sα和i sβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流i sm 和i st 。
图1-1 异步电动机矢量变换及等效直流电动机模型在三相坐标系上的定子交流电流,,A B C i i i ,通过3/2变换可以等效成两相静止正交坐标系上的交流s i α和s i β再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流sm i 和st i 。
m 绕组相当于直流电动机的励磁绕组,sm i 相当于励磁电流,t 绕组相当于电枢绕组,st i 相当于与转矩成正比的电枢电流。
基于Simulink/Powerlib交流异步电机矢量控制的仿真

发展及 交流 电机 具有结构 简单、 维护 方便、高容 量、 高 效率等优 点 ,特别是大 规模集成 电路和 计算机控
制 技 术 的发 展 ,高 性 能 交 流 调 速 系 统 应 运 而 生 ,使 交 流 变 频 和 调 速 系 统 的应 用 越 来 越 广 泛 【 l 】 。 但 由于 交 流 电机 的模 型 是 一 个 高价 、 非 线 性 、强 耦 合 的多 变量 系统 [ 2 ] 以及 电力 传 动 系 统 的复 杂 性 ,使 得 对 它 的建 模 与 仿 真 一 直 是研 究 的热 点 。 目前 ,Ma t l a b逐 渐 发 展 成 为 一 个 集 数 值 分 析 、 图 像 处 理 、 信 号 处 理 、 数 学 建 模 、 动 态 仿 真 等 为 一
成 一 个 理 想 化 的两 极 电机 J 。图 1 f a ) 是 三 相 交 流 异 步 电机 在 A BC坐 标 系 中 的基 本 电机 模 型 。 其 中定 子 三 相 对 称 绕 组 分 别 用 、 、C表 示 ,转 子 三 相 对 称 绕 组分别用 a 、b 、C表 示 ,定 子 相 与 转 子 a相 绕 组 轴 线 问 的夹 角 为 , 定 子绕 组 静 止 不 动 ,转 子 绕
中图分 类 号 :T P 2 7 3 文 献标 志码 :A
S i mu l a t i o n o f Ve c t o r Co n t r o l o f AC As y n c h r o n o u s Mo t o r Ba s e d o n S i mu l i n k / P o we r l i b
Ke v wo r ds : AC a s v n c h r o n o u s mo t o r ; v e c t o r c o n t r o l ; p o we r s y s t e m mo d u l e b a s e
异步电机矢量控制系统的设计及仿真研究

在定子 电流的两 个分 量之 间实 现 了解耦 , i 唯一 决定 磁链 i则 只影 响转矩 , 与直流 电机 中的励磁 电流和 电枢 电流
相对应 , 这样就大大简化 了多变量强耦合 的交流变频调 速系
r b s e s h p e e u ao n ec re t e l tro a i o a e trc n rlu e P o tolr a d t e s e d o u t s .T e s e d r g l tra d t u r n g ao ft d t n lv c o o t s 1 n r l , n h p e n h ru r i o c e r s o s s o e v rh o n t e c n r lp o e s n o d rt o v h s rb e ,we p o o e e in meh d o e p n e f n o e s o ti h o t r c s .I r e o s l e t e e p o lms t o rp s d a d sg t o f s e d c n rl ri h n u t n mo o e trc n r l o e p r o e o u p e sn p e e p n e o es o t n i— p e o t l n t e id ci trv co o to rt u p s fs p r si g s e d r s o s v r h o n oe o f h i d ci n mo o e trc n r la d e h n i g i u t trv co o to n n a cn mmu i . T e i d ci n moo s d f l r n e e tr c n rl t — o nt y h n u t tr u e ed o e t d v c o o t o a o i i o
异步电机矢量控制研究与仿真
f R 十 L P 一 叫 L L 卅 P 一 L 1 『 I , , J R + L P , L 研 L m P l L P - c o i L 卅 R , + L P 一 L ,
1 0 9 L
0 L
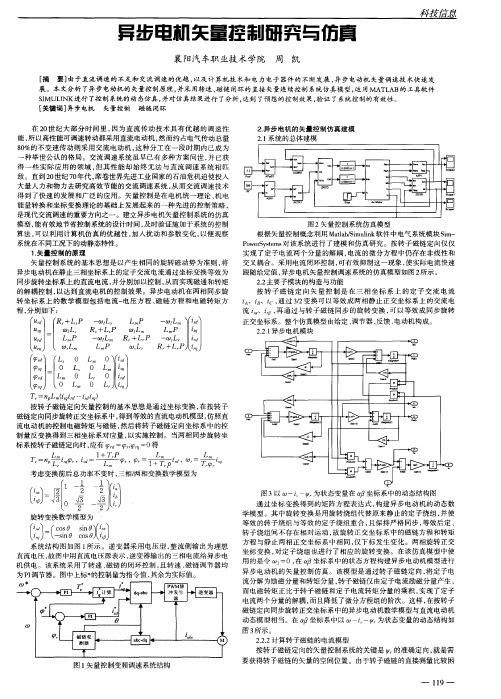
图 2矢量控制系统仿真模 型 根据 矢量控制概念 利用 Ma t l a h / S i mu l i n k 软件 中电气系统模块 S i e— r P o w e r S y s t e m s 对该 系统进行 了建 模和仿 真研 究。按转 子磁链定 向仅仅 实现 了定子 电流两个分 量的解耦 , 电流 的微 分方程 中仍 存在非线 性和 交叉耦合 。采用电流闭环控制 , 可有效 抑制这一现象 , 使实 际电流快速 跟随给定值 , 异步 电机矢量 控制调速系统的仿真模型如 图2 所示 。 2 . 2主要子模块 的构造 与功能 按 转 子磁 链 定 向矢 量 控 制是 在 三 相 坐标 系上 的定 子 交流 电流 i A 、i 8 、i c, 通过 3 / 2 变换可 以等效成两 相静止 正交坐标 系上的交 流电 流i i , 再通过 与转子 磁链 同步 的旋 转变换 , 可 以等效成 同步旋转
正交坐标 系。整个仿真模 型由给定 、 调节 器 、 反馈 、 电动机构成 。 2 . 2 . 1 异步 电机模块
L P
0 L
L , R, + L 尸 l
( l I , s 0 L m 0
ห้องสมุดไป่ตู้口
w
l L 0 L , 0 l 0 L 0 L
旋转变换数学模型为
w
]
图3 以 一i
为状态变量在 坐标 系中的动态结构图
f l i ] 一 r c o s 0 s i n 。 ]
基于MatlabSimulink的异步电机矢量控制系统仿真

基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。
基于SVPWM的异步电机矢量控制调速系统仿真
口应用 实例 口
0 10 4 5 1 ~/ , . 8 ).6× 0 h 其可靠度 函数 为 R () h 。 2 t :e 表 2为译码单元 、 动单元 的故障率表 。 驱
表2
仪器 仪表 用户
析 , 出 了相 应 的数 据 , 系 统 的 可靠 性 工 作 提 供 理 沦上 的 支 给 对 持, 但也存在不足之处 : 没有对单 元模块 的 内部 电路做 出详 并
仿 真 结 果 表 明 : 系统 不 仪具 有 矢量 控 制 调 速 系 统 的 优越 性能 , 该 同时 具
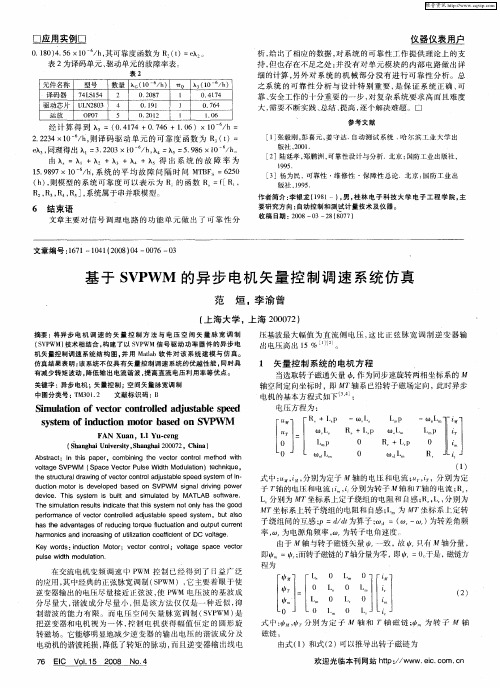
压基波最大幅值为 直流 侧 电压 , 比正弦脉 宽调 制 逆变 器输 这 出电 压 高 出 1 ¨ 。 5%
1 矢量控 制 系统 的电机 方程
当选取转子磁通矢量 作 为同步速旋转两 相坐标 系的 轴空间定 向坐标时 ,即 M 轴系 已沿转子磁场定 向, 时异步 此 电机 的基 本 方 程 式 如 下 : ¨
版社 ,9 5 19 .
6 结束语
文章主要对 信号 调 理 电路 的功 能单 元 做 出 了叮靠 性 分
作者简介 : 李银龙( 9 1一) 男 , 18 , 桂林 电子科 技大学 电子工 程学 院, 主 要研 究方 向 : 自动 控 制 和 测试 计 量 技 术及 仪 器 。
收 稿 日期 : 0 8— 3— 8 8 7 ) 20 0 2 (0 7
[] 1 张毅刚 , 彭喜元 , 姜守 达. 自动测试 系统 . 尔滨1业 犬学 出 哈
版社 ,0 1 20 .
[ ]陆廷孝, 2 郑鹏洲 , 可靠性设计与分析. 北京 : 国防工业出版社 ,
l 95 9 .
[ ]杨为民 , 3 可靠性 - 维修性 - 障性总论.北京 : 保 国防工业 出
《电力拖动与控制系统》课程设计-异步电机矢量控制Matlab仿真实验
异步电机矢量控制Matlab仿真实验1 异步电机动态模型推导1.1 异步电机动态数学模型的性质电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积得到感应电动势。
无论是直流电动机,还是交流电动机均如此。
交、直流电动机结构和工作原理的不同,至使表达式差异很大。
异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
(1)变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(或电流)和频率两种独立的输入变量。
在输出变量中,除转速外,磁通也是一个输出变量。
因此异步电机是一个多变量(多输入多输出)系统。
(2)异步电动机无法单独对磁通进行控制,电流乘磁通产生转矩,转速乘磁通产生感应电动势,在数学模型中含有两个变量的乘积项。
因此即使不考虑磁路不饱和等因素,数学模型也是非线性的。
(3)三相异步电动机三相绕组存在交叉耦合,每个绕组都有各自的电磁惯性,再考虑运动系统的机电惯性,转速与转角的积分关系等,动态模型是一个高阶系统。
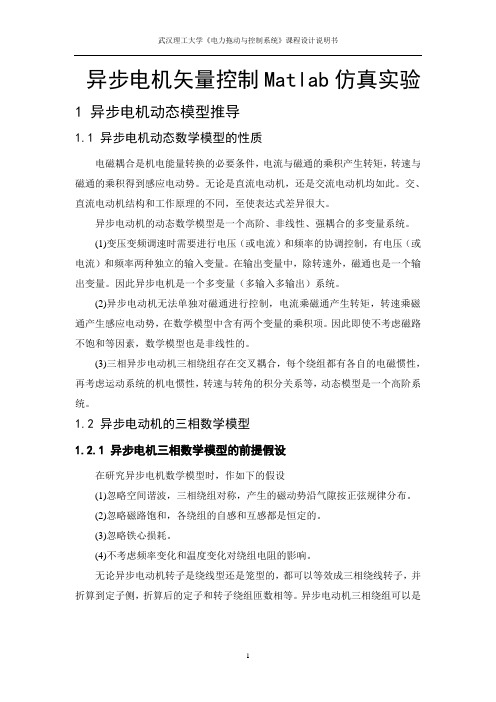
1.2 异步电动机的三相数学模型1.2.1 异步电机三相数学模型的前提假设在研究异步电机数学模型时,作如下的假设(1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论异步电动机转子是绕线型还是笼型的,都可以等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数相等。
异步电动机三相绕组可以是Y连接,也可以是Δ连接。
若三相绕组为Δ连接,可先用Δ—Y变换,等效为Y 连接。
然后,按Y连接进行分析和设计。
三相异步电机的物理模型如下图1所示,定子三相绕组轴线A、B、C在空间是固定的,转子绕组轴线a、b、c随转子以角转速w旋转。
图1 三相异步电动机的物理模型1.2.2 异步电机的三相动态模型的数学表达式异步电动机的动态模型由磁链方程、电压方程、转矩方程和运动方程组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海应用技术大学设计题目异步电机矢量控制Matlab仿真院(系)工程创新学院专业电气工程及其自动化班级 131032Y1学号 **********学生姓名聂震指导教师宗剑异步电机矢量控制Matlab 仿真聂震(上海应用技术学院,工程创新学院,1310300235)摘 要:矢量控制是一种优越的交流电机控制方式,它可以使交流电机取得同直流电机相媲美的控制效果。
本文研究了按磁场定向的直接矢量控制系统的仿真建模方法,并在MATLAB 下的SIMULINK 环境里运行得到仿真结果,最后对仿真结果进行分析。
关键词:矢量控制,交流电机,MATLAB 仿真ABSTRACT: Vector control is a kind of superior AC motor control mode, it can make the AC motor with DC motor comparable to the control effect. In this paper, the direct vector control system based on field oriented simulation modeling method is studied, and the simulation results are obtained in the SIMULINK environment of MATLAB, and the simulation results are analyzed.KEY WORDS :Vector control, AC motor, MA TLAB simulation1、 异步电动机数学模型基本原理异步电动机是个高阶、非线性、强耦合的多变量系统。
在研究异步电动机数学模型时,作如下的假设:(1)忽略空间谐波,设三相绕组对称,在空间中互差 电角度,产生的磁动势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的; (3)忽略铁心饱和;(4)不考虑频率变化和温度变化对绕组电阻的影响。
2、矢量控制基本原理矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以腔制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式为矢量控制方式。
2.1 坐标变换坐标变换的目的是将交流电动机的物理模型变换成类似直流电动机的模式,这样变换后,分析和控制交流电动机就可以大大简化。
以产生同样的旋转磁动势为准则,在三相坐标系上的定子交流电流A i 、B i 、C i ,通过三相——两相变换可以等效成两相静止坐标系上的交流电流αi 和βi ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流d i 和q i 。
如果观察者站到铁心上与坐标系一起旋转,他所看到的就好像是一台直流电动机。
2.1.1 3/2变换三相绕组A 、B 、C 和两相绕组α、β之间的变换,称作三相静止坐标系和两相静止坐标系间的变换,简称3/2变换。
图1中绘出了A 、B 、C 和α、β两个坐标系,为方便起见,取A 轴和α轴重合。
当三相总磁动势与两相总磁动势相等时,两套绕组瞬时磁动势在α、β轴上的投影都应相等:图1 三相、两相静止坐标系与磁通势空间矢量2/3C 是三相坐标系变换到两相坐标系的电流变换阵,根据变换前后产生相同的磁动势的原则和变换前后功率不变的原则,可以得到:23333233311cos cos()3322sinsin ()33A B C A B C B C B C N i N i N i N i N i i i N i N i N i i i αβππππ=--=--=-=-如果从两相坐标系变换到三相坐标系,简称2/3变换:考虑到实际异步电机的三相绕组为不带中线的对称绕组,没有零轴电流,并且满足0AB C i i i ++=,于是三相坐标系与两相坐标系之间的电流变换可进一步简化为:2.1.2 2s/2r 变换α2图2 两相静止和旋转坐标系与磁动势空间关系在图2中,两相交流电流i i αβ和和两个直流电流d q i i 和,产生同样的以同步转速1ω旋转的合成磁动势s F 。
由图2可见,i i αβ和,d q i i 和之间有下列关系:两相旋转坐标系变换到两相静止坐标系的变换矩阵为:两相静止坐标系到两相旋转坐标系的变换矩阵是:3.转子磁链观测模型矢量控制是以转子磁链的矢量r ψ来定向的,首先需要确定r ψ的瞬时空间位置。
在控制系统中,为了对运行参数的指令值和实际检测值进行数学运算,还需要知道r ψ的大小。
因此,转子磁链准备的检测和运算,是进行矢量变换控制的前提。
转子磁链观测器的设计一般要满足以下两点要求: (1)模型算法稳定,模型的估计值对实际值的收敛速度要快,符合实际应用要求。
(2)对电动机参数的变换具有自适应和自校正的功能,对测量时信号的噪声干扰有滤波、抑制的功能。
本次仿真采用基于静止坐标系(αβ-)转子磁链电流观测模型4.矢量控制系统设计按转子磁链定向仅仅视线了定子电流两个分量的解耦,电流的微分方程中仍存在非线性和交叉耦合。
采用电流闭环控制,可有效抑制这一现象,使实际电流快速跟随给定值。
在按转子磁链定向坐标系中计算定子电流励磁分量和转矩分量给定值,经过反旋转变换2r/2s 和2/3变换得到三相电流。
通过电流闭环的跟随控制,输出异步电动机所需的三相定子电流。
4.1转子磁链定向的同步旋转正交坐标系状态方程3/2111220C ⎡⎤--⎢⎥⎢=⎢⎢⎣⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---=2321232101323/2C ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡B A i i i i 221023βα⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡βαi i i i B A 2161032⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡βαβαϕϕϕϕi i C i i i i r s q d 2/2cos sin sin cos 2/2cos sin sin cos s r C ϕϕϕϕ⎡⎤=⎢⎥-⎣⎦2/2cos sin sin cos r s C ϕϕϕϕ-⎡⎤=⎢⎥⎣⎦α图3 静止正交坐标系与按转子磁链定向的同步旋转正交坐标系⎪⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎪⎬⎫+-+-ψ-=+++-ψ=+ψ-=ψ-ψ=s st sm sm r s m r r s r r s m st s sm st sm rs m r r s r r r s m sm smrm r r r L p r st r m p L u i i L L L R L R L L L dtdi L u i i L L L R L R T L L L dt di i T L T dt d T J n i JL L n dt d σωσωσσωσσω12221222214.2按转子磁链定向矢量控制的基本思想在按转子磁链定向坐标系中计算定子电流励磁分量和转矩分量给定值smi *和st *i,经过反旋转变换2r/2s 得到αs i *和βs *i ,再经过2/3变换得到A i *、B *i 和C *i ,然后通过电流闭环的跟随控制,输出异步电动机所需的三相定子电流。
图4 矢量控制系统原理结构图4.3 磁链开环转差型矢量控制系统间接定向矢量控制系统借助于矢量控制方程中的转差公式,构成转差型的矢量控制系统,它继承了基于稳态模型转差频率控制系统的优点,又利用基于动态模型的矢量控制规律克服了大部分的不足之处。
图5磁链开环转差型矢量控制系统5.异步电机矢量控制仿真 5.1电机参数图6 电机参数5.2 仿真图图7 仿真图5.3 仿真波形及分析额定转速给定1500r/min5.3.1空载启动时:起动转矩Tm=0 N·m图8 空载起动时电机n Te iq 波形图从图中可以看出,当t=0.04s电机达到稳定转速1500r/min,超调量很小,转矩Te等于0,电机达到要求。
5.3.2重载启动时起动转矩Tm=24 N·m图9 重载起动时电机n Te iq 波形图从图中可以看出,当t=0.04s电机达到稳定转速1500r/min,超调量很小,启动时转速有负的是由于启动转矩太大引起电机反向转动。
转矩Te大约等于20N·m,电机达到要求。
5.3.3空载启动,突加负载:起动转矩Tm=0 N·m,在0.2s时突加17N·m的负载。
图10 突加负载时电机n Te iq 波形图从图中可以看出,当t=0.04s电机达到稳定转速1500r/min,超调量很小,当t=0.2s时突加负载,速度有所跌落,但是很快又恢复额定转速1500r/min。
转矩Te由于突加负载而有所增加,电机达到要求。
6.总结与分析从图8我们可以看出,在额定转速下,系统空载起动,电机的输出转速很快就达到了稳定状态,而且超调量很小,可见系统有着良好的动态性能,转速波形和输出转矩波形较为理想;由图10可知,当突加负载时,系统很快就跟踪上了变化,过度过程快,有很好的跟随和抑制扰动的性能,相应时间短,说明系统有着良好的调速性;总体来看,不论是恒速运行还是变速运行,系统都有着比较优良的动态性能、稳定性能和调速性能,说明矢量控制是交流电机控制领域里一种比较优越的控制方式。
本次利用MATLAB/SIMULINK建立了异步电动机直接矢量控制的系统仿真模型图,运行仿真模型,得出了预期的仿真结果,并对仿真结果进行分析,从而论证了矢量控制是交流电机控制领域里一种比较优越的控制方式。
7.参考文献[1]洪乃刚.电力电子、电机控制系统的建模与仿真[M].北京:机械工业出版社,2010.1.[2]阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:机械工业出版社,2009.8.。