基于PLC的小型搬运机械手控制系统设计说明书
基于PLC控制的搬运机械手设计

l B 1
1 B 2
横臂 收回到位
横臂 伸出到位
手 爪 松 开 状 态
1 0 . 2
1 0 . 3
1 0 . 4
2 B 1
2 B 2
3 B 1
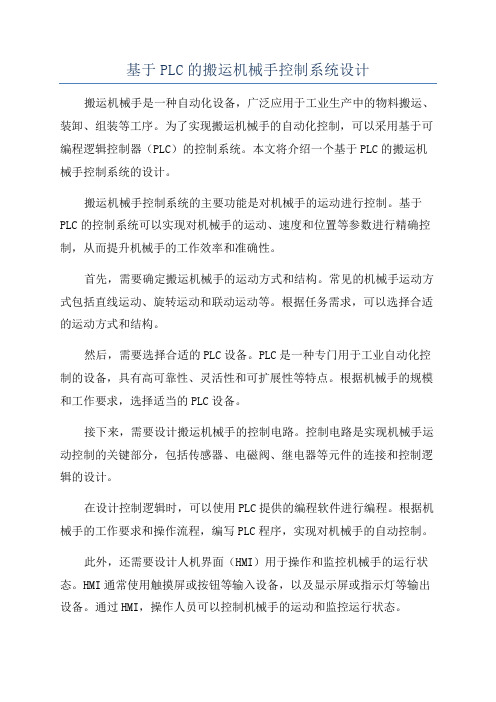
搬运机械手是 一个整体的单元 , 其动作顺序为 : 开始_ + 横 臂 伸 出一 竖 臂 伸 出一 手 指 夹 紧 一 竖 臂 收 回 横臂收回_ + 摆动右摆 横臂伸出一竖臂伸出_ ÷
急停
I 2 7
摆动 气缸顺时针 摆动气 缸逆时针 双 活塞杆气缸 杆收 回 双 活塞杆气缸杆伸 出
气 爪 开
Q o . 0 Q O . 1 Q O . 2 Q O . 3
Q O . 4
1 Y1 l Y 2 2 Y l 2 Y 2
3 Yl
通 过 对 搬 运 机 械 手 控 制 线 路 及 加 工 工 艺 的 分
采用组态监控 ,为搬运机械手 的运动提供 了一个仿 析 , 输 入信号 为按钮 、 选择开关 、 接近开关等主令 电 真的工业环境 , 通过软件控制代替硬接线控制 , 以软 器 ; 输 出信号为继电气线圈 、 电磁阀等控制 电器 。结 件编程 完成搬 运机械手 运动过 程 的动作修 改和控 合搬运机械手 的运动过程 ,该 系统需要 1 5 个输入 制, 在一定程度上提高了搬运机械手系统的灵活性。
要: 传统的搬运机械手采用硬接线控制 , 系统接 线复杂 , 灵活性 有待提 高。提 出了一种基 于 P L C控 制的搬运机械 手
设计 方案 , 并采用 MCG S组 态监控 。 以软件编程代替硬件控 制完成机械 手的运 动控 制 , 在一定程度上提 高了搬运机械 手
系统 的灵 活性 。
基于PLC的搬运机械手控制系统设计
基于PLC的搬运机械手控制系统设计搬运机械手是一种自动化设备,广泛应用于工业生产中的物料搬运、装卸、组装等工序。
为了实现搬运机械手的自动化控制,可以采用基于可编程逻辑控制器(PLC)的控制系统。
本文将介绍一个基于PLC的搬运机械手控制系统的设计。
搬运机械手控制系统的主要功能是对机械手的运动进行控制。
基于PLC的控制系统可以实现对机械手的运动、速度和位置等参数进行精确控制,从而提升机械手的工作效率和准确性。
首先,需要确定搬运机械手的运动方式和结构。
常见的机械手运动方式包括直线运动、旋转运动和联动运动等。
根据任务需求,可以选择合适的运动方式和结构。
然后,需要选择合适的PLC设备。
PLC是一种专门用于工业自动化控制的设备,具有高可靠性、灵活性和可扩展性等特点。
根据机械手的规模和工作要求,选择适当的PLC设备。
接下来,需要设计搬运机械手的控制电路。
控制电路是实现机械手运动控制的关键部分,包括传感器、电磁阀、继电器等元件的连接和控制逻辑的设计。
在设计控制逻辑时,可以使用PLC提供的编程软件进行编程。
根据机械手的工作要求和操作流程,编写PLC程序,实现对机械手的自动控制。
此外,还需要设计人机界面(HMI)用于操作和监控机械手的运行状态。
HMI通常使用触摸屏或按钮等输入设备,以及显示屏或指示灯等输出设备。
通过HMI,操作人员可以控制机械手的运动和监控运行状态。
最后,进行系统调试和测试。
在将系统投入使用之前,需要进行调试和测试,确保搬运机械手的运动控制正常,并满足工作要求。
总结起来,基于PLC的搬运机械手控制系统设计包括确定运动方式和结构、选择合适的PLC设备、设计控制电路、编写PLC程序、设计人机界面以及进行系统调试和测试等步骤。
通过PLC控制系统的应用,可以提高机械手的自动化程度,提升生产效率和产品质量。
小型搬运机械手的PLC控制系统设计

小型搬运机械手的PLC控制系统设计
小型搬运机械手的PLC控制系统设计包括以下几个方面:
1. 确定系统需求:首先需要明确机械手的工作任务和工作环境,包
括搬运物品的重量、尺寸和形状,以及工作空间的限制。
2. 选择适当的PLC:根据系统需求选择合适的PLC,考虑其输入输
出点数、通信接口、处理能力和可靠性等因素。
3. 确定传感器和执行器:根据机械手的工作任务选择合适的传感器
和执行器,例如光电传感器、接近开关、压力传感器、伺服电机等。
4. 确定控制策略:根据机械手的工作任务确定控制策略,包括运动
控制、路径规划、物体识别等。
5. 编写PLC程序:根据控制策略编写PLC程序,使用相应的编程语
言(如 ladder diagram、structured text 等),实现机械手的自
动化控制。
6. 连接传感器和执行器:根据PLC的输入输出点数,将传感器和执
行器与PLC连接起来,确保数据的准确传输和控制信号的可靠输出。
7. 调试和测试:完成PLC程序编写后,进行调试和测试,验证系统
的功能和性能是否满足需求,对程序进行优化和修正。
8. 系统集成和实施:将PLC控制系统与机械手进行集成,确保系统
的稳定运行和安全性。
9. 运维和维护:定期对PLC控制系统进行维护和保养,包括检查传
感器和执行器的工作状态,更新PLC程序,修复故障等。
需要注意的是,小型搬运机械手的PLC控制系统设计需要根据具体
的应用场景和要求进行定制,以上仅为一般性的设计步骤和考虑因素,具体设计还需根据实际情况进行调整和优化。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计搬运机械手是工业生产中常用的一种机器人,目的是为了将物品从一个地方搬到另一个地方,以实现生产线的自动化生产。
为了方便操作和控制机械手的运动,我们常使用PLC进行控制。
本文将详细介绍基于PLC的搬运机械手控制系统设计并分为以下几个部分:系统设计、硬件设计、软件设计和测试与优化。
系统设计在设计搬运机械手的控制系统前,需要明确其基本能力以及操作条件。
本文需要实现的是一个能够在工业生产上自动完成货物的移动,如从一个点到达另一个点,或从一个点将货物取下并放入另一个点的机械手控制系统。
硬件设计在硬件方面,机械手的结构以及体积会影响到设计的复杂度和控制的难度。
机械手的操作部分包括控制电路、执行器驱动电路、电源等。
现在,我们来介绍每个部分的主要内容。
控制电路部分包括PLC、IO模块等。
PLC是机械手控制的核心,负责读取传感器信号并控制执行器的动作。
IO模块则负责将信号转换为PLC能接受的信号进行处理。
执行器驱动电路部分主要负责控制电机动作。
电机的选择与应用需要根据机械手的具体要求而定,需要注意的是,电机的转矩和功率需要协调匹配,还需要注意电机的供电和控制电路之间的配合问题。
电源系统是机械手控制系统的基础之一,电源的大小和控制器的匹配与应用直接关系到系统的正常运行。
需要根据需要提供相应的电压以及功率供给系统。
软件设计在软件设计方面,我们借助PLC程序进行控制,根据机械手的执行需要编写相应的程序,实现机械手的移动、旋转、夹取或放置操作。
具体流程如下:1. 初始化- 设定初始位置和状态等参数;2. 等待操作信号- 根据设定的信号进行等待;3. 传感器检测- 检测对象的位置和状态;4. 判断操作- 根据传感器检测结果进行相应操作;5. 输出控制信号- 控制执行器动作,改变机械手所处的位置和状态。
测试与优化测试与优化是机械手控制系统设计的重要一步,目的是检查系统的稳定性和准确性。
在测试过程中,需要测试机械手的各种运动状态,比如加速度、负载、速度等参数,以确定机械手的质量和性能优化方向。
基于PLC的机械手控制系统设计任务书

基于PLC的机械手控制系统设计任务书任务书设计目标:设计一个基于PLC的机械手控制系统,能够实现对机械手的精确控制和操作。
系统能够完成各种复杂的任务,如物料的搬运、装配和堆垛等。
设计要求:1.系统应具备自动化控制功能,能够通过PLC对机械手进行控制。
2.系统应支持多种控制模式,如手动控制、自动控制和远程控制等。
3.系统应能够实现对机械手各个关节的精确控制,保证操作的准确性和稳定性。
4.系统应具备自诊断和故障检测能力,能够对机械手的状态进行实时监测和报警。
5.系统应具备良好的反应速度,能够快速响应用户的指令和要求。
6.系统应采用可靠的通信协议和接口,能够与其他设备和系统进行数据交互。
7.系统应具备良好的人机交互界面,易于操作和使用。
8.系统应具备扩展性和可升级性,能够满足未来的需求和变化。
设计内容:1.系统硬件设计:a)选择适合的PLC控制器和电机驱动器,满足系统要求。
b)设计机械手的结构和传动装置,考虑机械手的工作范围和载荷要求。
c)选择合适的传感器和执行器,用于机械手的位置检测和动作执行。
d)设计电源和电气控制部分,提供稳定可靠的电力供应。
e)设计安全保护装置,确保系统和人身安全。
2.系统软件设计:a)编写PLC控制程序,实现机械手的各种动作和控制模式。
b)设计人机交互界面,使操作人员能够方便地对机械手进行控制和监测。
c)实现系统的自诊断和故障检测功能,能够及时发现和排除故障。
d)设计远程控制和数据交互功能,使系统能够与其他设备和系统进行联动。
3.系统测试和验收:a)对系统进行各种功能和性能测试,确保系统能够满足设计要求。
b)进行系统集成测试,验证系统与其他设备和系统的接口和兼容性。
c)完成系统的文档编写和培训,使用户能够方便地使用和维护系统。
d)按照用户需求和要求进行现场验收和调试,确保系统正常运行。
4.系统实施和推广:a)根据用户需求和场地情况,对系统进行布局和安装。
b)组织人员进行系统使用和维护培训,使用户能够熟练使用系统。
基于PLC的搬运机械手控制系统的设计
基于PLC的搬运机械手控制系统的设计本文是基于PLC的搬运机械手控制系统的设计。
根据搬运机械手控制系统给出了控制流程图、阐述了用FX2N-1PG作上位机控制步进电机按一定角度旋转原理、用PLC作上位机控制伺服电机动作原理。
详细描述了基于PLC的搬运机械手控制系统的设计的硬件接线图和设计程序。
并进行了试验验证。
该设计合理规范并能实现搬运机械手控制系统的控制要求。
标签:S7-300PLC 步进电机伺服电机FX2N-1PG模块细分定位脉冲搬运机械手控制系统主要由日本三菱公司的FX2N系列PLC的特殊功能模块FX2N-1PG、步进驱动器、步进电动机和气动控制系统实现运行控制,具有抓取、放松、上升、下降和180°回旋功能,并能沿丝杆导轨做左右水平移动,同时配合伺服驱动器、、伺服电机将成品物料送到指定仓库各站点。
控制系统示意图:一、用PLC控制搬运系统的设计原理搬运机械手系统运用日本三菱公司的FX2N系列PLC对机械手进行一系列的控制,最终目的是把物料准确的送入指定仓库。
要实现准确定位主要涉及到FX2N-1PG模块的定位功能,步进驱动、步进电机和伺服驱动、伺服电机的动作原理。
1.定位脉冲输出模块FX2N-1PGFX2N-1PG定位脉冲输出模块,可输出一相脉冲数、频率可变的定位脉冲(最大100KHz,脉冲量32位),通过连接伺服电机或步进电机驱动器能实现独立1轴的简单定位控制。
首先了解PLC与1PG的体系结构关系。
FX2N-1PG是独立于PLC主机外的扩充模块,以数据总线连接。
模块依据安装位置先后自动设为K0~K7编号地址,所以必须有特殊的PLC数据写入指令,再配合时序及逻辑控制写入FX2N-1PG 寄存器内。
2.用PLC作上位机控制步进电机动作设计原理搬运机械手的定位控制可由PLC、步进驱动和步进电动机实现运行控制。
机械手运行过程为:回原点——定位运行——返回停止。
在机械手运行进程中,若碰到相应方向的极限开关时,机械手立即停止。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计PLC(可编程逻辑控制器)是一种广泛应用于自动化领域中的控制设备,它拥有可编程的逻辑控制功能,具有高精度、高可靠性、动态稳定性好等特点。
在制造业中,搬运机械手广泛应用于对生产线上产品的搬运,包装和装载等操作。
基于PLC 的搬运机械手控制系统就是将PLC作为核心控制器,实现对搬运机械手的控制和调节,从而提高其工作效率和精度。
搬运机械手控制系统设计基于PLC的搬运机械手控制系统的设计由以下几个部分组成:1. 机械结构设计:机械结构是搬运机械手控制系统的基本构成部分,包括机械臂、传动机构和夹持机构等。
机械结构的设计需要考虑机械臂的长度、强度、重量、运动速度和角度等参数。
传动机构包括电机、减速器、传动轮等,其作用是将电机转换为机械臂的运动。
夹持机构用于夹持待处理的物品,实现搬运和装载等操作。
2. 电气设计:电气设计包括控制系统的电源、控制器、传感器和执行器等。
控制系统的电源是供电保障,必须保证输入电压稳定。
控制器根据输入信号实现对机械手的控制,包括控制信号的生成、控制程序的调试和PID调节等。
传感器用于实时获取机械手的位置、状态和运动方向等信息。
执行器执行机械手的运动和夹持等功能。
3. 软件设计:PLC控制器是基于程序的工作,程序的编写需要考虑搬运机械手的不同工作场景和判据,以实现自动化控制。
软件设计主要包括程序设计和逻辑控制等。
程序设计是根据搬运机械手的功能和运动方式编写程序,以实现对机械手的控制、调节和监测。
逻辑控制是根据具体工作场景进行逻辑判断,实现机械手的自动化控制动作。
基于PLC的搬运机械手控制系统的特点基于PLC的搬运机械手控制系统在制造业中得到广泛应用,其具有以下特点:1. 稳定性好:PLC控制器控制器稳定性好,能够长时间连续工作,不易出现故障。
2. 精度高:PLC控制器具有高精度的控制能力,能够控制搬运机械手的精度和速度,以及对物品的判别和定位等。
3. 可编程性强:PLC控制器采用可编程的逻辑控制,能够为不同的工作场景编写程序,实现自动化控制。
毕业设计搬运机械手PLC控制系统设计
搬运机械手PLC控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要包括由两个电磁阀控制的液压钢来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的快进、慢进、快退、慢退的运动运动;其动作转换靠设置在各个不同部位的行程开关(SQ1---SQ9)产生的通断信号传输到PLC控制器,通过PLC内部程序输出不同的信号,从而驱动外部线圈来控制电动机或电磁阀产生不同的动作,可实现机械手的精确定位;其动作过程包括:下降、夹紧、上升、慢进、快进、慢进、延时、下降、放松、上升、慢退、快退、慢退;其操作方式包括:回原位、手动、单步、单周期、连续;来满足生产中的各种操作要求。
关键词:搬运机械手,可编程控制器(PLC),液压,电磁阀ABSTRACTWith the popularity of industrial automation and development, the demand for year-on-year increase of controller, handling the application of robot gradually popularity, mainly in the automotive, electronic, mechanical processing, food, medicine and other areas of the production line or cargo transport, we can be more good to save energy and improve the transport efficiency of equipment or products, to reduce restrictions on other modes of transportation and inadequate to meet the requirements of modern economic development.The manipulator mechanical structure includes two solenoid valves controlled by hydraulic manipulator steel to achieve the increased decline in sports and workpiece clamping action, the two different motor speed through the two motor coils positive control in order to achieve car of the fast-forward, slow forward, fast rewind, slow movement back movement; conversion by setting its action in various different parts of the trip switch (SQ1 --- SQ9) generated on-off signal transmission to the PLC controller, through the PLC internal different output signal, which drives the external coil to control the motor or solenoid valves have a different action, the robot can achieve precise positioning; their course of action include: decline in clamping increased, slow forward, fast forward, slow progress, the extension of , the drop in, relax, rise, slow back, rewind, slow back; its operation, including: Back in situ, manual,single-step, single cycle, continuous; to meet the production requirements of the various operations and maintenance.Keywords: handling mechanical hands, Programmable Logic Controller (PLC), hydraulic, solenoid valve目录前言 (1)第一章机械手的概况1.1 搬运机械手的应用简况 (2)1.2 机械手的应用意义 (3)1.3 机械手的发展概况 (3)第三章搬运机械手PLC控制系统设计3.1 搬运机械手结构及其动作………………………………………………3.2 搬运机械手系统硬件设计………………………………………………3.3 搬运机械手控制程序设计………………………………………………1 操作面板及动作说明……………………………………………………2 I/O分配…………………………………………………………………3 梯形图的设计……………………………………………………………1)梯形图的总体设计……………………………………………………2)各部分梯形图的设计…………………………………………………3)绘制搬运机械手PLC控制梯形图……………………………………结论………………………………………………………………………………谢辞………………………………………………………………………………参考文献…………………………………………………………………………………. 附:语句表梯形图I/O接线图前言机械手:mechanical hand,也被称为自动手,auto hand能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的小型搬运机械手控制系统设计目录 (1)文摘 (3)Abstract (3)第一章绪论 (4)1.1机械手概述 (4)1.2机械手的组成和分类 (4)1.2.1机械手的组成 (5)1.2.2机械手的分类 (6)1.3国内外发展状况.. (7)1.4课题的提出及主要任务 (8)1.4.1课题的提出 (8)1.4.2课题的主要任务 (9)第二章机械手的设计方案 (9)2.1机械手的座标型式与自由度 (10)2.2机械手的手部结构方案设计 (11)2.3机械手的手腕结构方案设计 (13)2.4机械手的手臂结构方案设计 (14)2.5机械手的驱动方案设计 (15)2.6机械手的控制方案设计 (17)2.7机械手的主要参数 (18)2.8机械手的技术参数列表 (19)第三章手部结构设计 (20)3.1夹持式手部结构 (21)3.1.1手指的形状和分类 (22)3.1.2设计时考虑的几个问题 (23)3.1.3手部夹紧气缸的设计 (24)第四章手腕结构设计 (26)4.1手腕的自由度 (28)4.2手腕的驱动力矩的计算 (29)4.2.1手腕转动时所需的驱动力矩 (29)4.2.2回转气缸的驱动力矩计算 (30)4.2.3回转气缸的驱动力矩计算校核 (33)第五章手臂伸缩,升降,回转气缸的设计与校核 (33)5.1手臂伸缩部分尺寸设计与校核 (34)5.1.1尺寸设计 (35)5.1.2尺寸校核 (35)5 .1 .3导向装置 (36)5 .1 .4平衡装置 (37)5.2手臂升降部分尺寸设计与校核 (37)5.2.1尺寸设计 (37)5.2.2尺寸校核 (37)5.3手臂回转部分尺寸设计与校核 (38)5.3.1尺寸设计 (39)5.3.2尺寸校核 (40)第六章气动系统设计 (41)6.1气压传动系统工作原理图 (42)6.2气压传动系统工作原理图的参数化绘制 (43)第七章机械手的PLC控制设计 (44)7.1可编程序控制器的选择及工作过程 (45)7.1.1可编程序控制器的选择 (46)7.1.2可编程序控制器的工作过程 (47)7.2可编程序控制器的使用步骤 (48)7.3机械手可编程序控制器控制方案 (49)结论 (50)致谢 (51)参考文献 (52)中文摘要本文简要介绍了小型搬运机械手的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
设计了机械手的手臂结构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
关键词小型搬运机械手,机械手,气动,可编程序控制器(PLC)ABSTRACTAt first, the paper introduces the conception of the industrial robot and the eler. dary information of the development briefly . What’s more, the paper accounts for the background and the primary mission of the topic.The paper introduces the function, composing and classification of the manipulator , tells out the free-degree and the form of coordinate . At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator , This paper designs the structure of the wrist , computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm.The paper designs the system of air pressure drive and draws the work principle chart , the manipulator uses PLC to control . The paper institutes two control schemes of PLC according to the work flow of the manipulator . The paper draws out the work time sequence chart and the trapezia chart . What’s more , the paper workout the control program of the PLC ,KEY WORDS : industrial robot, manipulator , pump , air pressure drive , PLC第一章绪论1.1工业机械手概述小型搬运机械手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备.机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用.机械手的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
1.2 机械手的组成和分类1.2.1机械手的组成机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
各系统相互之间的关系如方框图2-1所示。
机械手组成方框图:Pane chart of composition of manipulator(一)执行机构包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。
1、手部即与物件接触的部件。
由于与物件接触的形式不同,可分为夹持式和吸附式手在本课题中我们采用夹持式手部结构。
夹持式手部由手指(或手爪)和传力机构所构成。
手指是与物件直接接触的构件,常用的手指运动形式有回转型和平移型。
回转型手指结构简单,制造容易,故应用较广泛。
平移型应用较少,其原因是结构比较复杂,但平移型手指夹持圆形零件时,工件直径变化不影响其轴心的位置,因此适宜夹持直径变化范围大的工件。
手指结构取决于被抓取物件的表面形状、被抓部位(是外廓或是内孔)和物件的重量及尺寸。
常用的指形有平面的、V形面的和曲面的:手指有外夹式和内撑式;指数有双指式、多指式和双手双指式等。
而传力机构则通过手指产生夹紧力来完成夹放物件的任务。
传力机构型式较多时常用的有:滑槽杠杆式、连杆杠杆式、斜面杠杆式、齿轮齿条式、丝杠螺母弹簧式和重力式等。
2、手腕是连接手部和手臂的部件,并可用来调整被抓取物件的方位(即姿势)3、手臂手臂是支承被抓物件、手部、手腕的重要部件。
手臂的作用是带动手指去抓取物件,并按预定要求将其搬运到指定的位置.工业机械手的手臂通常由驱动手臂运动的部件(如油缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮机构等)与驱动源(如液压、气压或电机等)相配合,以实现手臂的各种运动。
4、立柱立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。
机械手的立I因工作需要,有时也可作横向移动,即称为可移式立柱。
5、行走机构当工业机械手需要完成较远距离的操作,或扩大使用范围时,可在机座上安滚轮式行走机构可分装滚轮、轨道等行走机构,以实现工业机械手的整机运动。
滚轮式布为有轨的和无轨的两种。
驱动滚轮运动则应另外增设机械传动装置。
6、机座机座是机械手的基础部分,机械手执行机构的各部件和驱动系统均安装于机座上,故起支撑和连接的作用。
(二)驱动系统驱动系统是驱动工业机械手执行机构运动的动力装置调节装置和辅助装置组成。
常用的驱动系统有液压传动、气压传动、机械传动。
控制系统是支配着工业机械手按规定的要求运动的系统。
目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。
控制系统有电气控制和射流控制两种,它支配着机械手按规定的程序运动,并记忆人们给予机械手的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。