柔性机械臂的控制技术研究
绳驱动柔性机器人运动学建模及主从控制研究

绳驱动柔性机器人运动学建模及主从控制研究
朱靖;齐飞;佘世刚;张恒;裴海珊
【期刊名称】《机电工程》
【年(卷),期】2023(40)2
【摘要】针对目前组装式绳驱动柔性机器人存在的装配复杂、控制精度差与刚度低等问题,提出了一种用于狭小空间探测的超冗余绳驱动柔性机器人。
首先,设计了一种通过卯榫连接的绳驱动柔性机械臂,基于常曲率假设,利用MATLAB软件建立了该机器臂的运动学模型,并对其工作空间与绳长变化量进行了仿真分析;然后,分别设计了基于上位机软件界面和增量映射模型的主从控制方法;最后,搭建了单关节的柔性检测机器人系统样机平台,并通过旋转弯曲与负载弯曲试验,对所建模型和控制策略进行了验证。
研究结果表明:新构型柔性机器臂可以解决柔性机器人刚度较低的问题,其运动特性明显优于芯柱型柔性机器人,其负载能力达到250 g时,末端位置的控制误差小于8%,满足柔性机器人的控制需求。
【总页数】9页(P266-274)
【作者】朱靖;齐飞;佘世刚;张恒;裴海珊
【作者单位】常州大学机械与轨道交通学院
【正文语种】中文
【中图分类】TH122;TP242
【相关文献】
1.新型绳驱动混联肘腕康复机器人运动学分析
2.柔性驱动立筒仓清理机器人转动控制系统建模及简化
3.一种欠驱动两级柔性自平衡机器人的建模及其最优控制
4.三自由度绳驱动并联机器人运动学分析
5.足底驱动型下肢康复机器人的运动学建模与轨迹跟踪控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性空间机械臂振动抑制的模糊终端滑模控制
.
国 家 自然 科学 基 金 资 助项 目( 号 : 0 7 0 0 编 16 2 4 ) 收稿 日期 : 0 9 1 - 6 修 改稿 收 到 日期 :0 91 — 1 2 0 — 12 ; 2 0 — 2 3
42 8
振
动、 测
中 图分 类 号 TP2 1 03 3 7 THl 3 1 4 1 . 1.
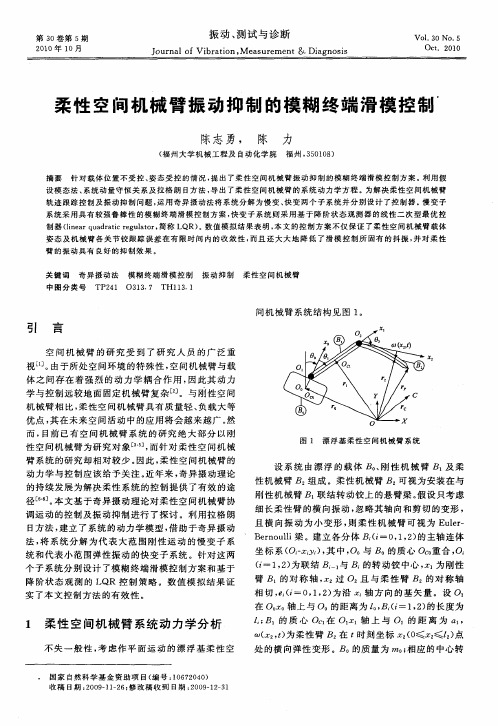
间机 械 臂系统 结构 见 图 1 。
引 言
空 间 机 械 臂 的 研 究 受 到 了研 究 人 员 的广 泛 重
视[ 。 1 由于所处 空间环 境 的特殊性 , 间机 械臂 与载 ] 空
体 之间 存 在着 强烈 的 动力 学 耦合 作 用 , 因此其 动力 学与控 制远 较地 面 固定 机 械臂 复杂 L 。与刚 性空 间 2 ]
实 了本 文 控 制 方 法 的有 效 性 。
1 柔 性 空 间 机 械 臂 系 统 动 力 学 分 析
不 失 一 般 性 , 虑 作 平 面 运 动 的 漂 浮 基 柔 性 空 考
z; 的 质 心 0c在 O B 。 上 与 (1 距 离 为 a , 轴 )的
o x , 为 柔性 臂 B 在 t J ( ) 2 时刻坐标 z ( ≤z ≤z) O 点 处的 横 向弹性 变形 。B。 的质 量为 优。相 应 的中心转 ;
第 3 第 5期 o卷
21 0 0年 1 O月
振 动 、 试 与 诊 断 测
J u n lo b ain, a u e n o r a fVi r t o Me s r me t& Dig o i a n ss
V o .3 o. 1 0N 5
OC . 2 1 t 00
柔性 空 间机械 臂振 动抑 制 的模糊 终端 滑 模 控 制
二自由度机械臂实验报告

二自由度机械臂实验报告实验报告课程名称: 机电系统建模与控制实验项目名称: 二自由度机械臂实验****: **组别:第6组成员:刘仕杰.胡据林.王昊阳.于骁实验日期:2019年12月9日一、实验简介二自由度(DOF)串联柔性(2DSFJ)机械臂包括两个用于驱动谐波齿轮箱(零回转间隙)的直流电机及一个双杆串联机构()。
两个连接都是刚性的。
主连接通过一个柔性关节耦合到第一个驱动器上,在其端部载有第二个谐波驱动器,该驱动器通过另一个柔性关节与第二个刚性连接耦合。
两个电机及两个柔性关节都装有正交光学编码器。
每一个柔性关节配有两个可更换的弹簧。
使用一个翼形螺钉零件,就可沿着支撑杆,将每根弹簧端移到所希望的不同定位点。
该系统可视为多种手臂式机器人机构的高度近似,是典型的多输入多输入(MIMO)系统。
二、实验内容1. 系统开环时域动态特性和频域特性分析;2. 应用极点配置方法设计控制器,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变极点分布位置,完成至少 2 组不同闭环参数性能对比;3. 应用 LQR 方法设计反馈控制律,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变 Q 和 R 的值,完成至少 2 组不同闭环参数性能对比;4. 设计全阶状态观测器,完成物理 PSF 与状态观测(至少两组观测器极点位置)综合作用下的系统性能控制。
三、实验设备1.设备构造与线路图(1)直流电机#1第一台直流电机为一台可在最高27V 下工作的Maxon273759 精密刷电机(90 瓦)。
该电机可提供 3A 的峰值电流,最大连续电流为 1.2A。
注意:施用在电机上的高频信号会对电机刷造成最终损坏。
产生高频噪音的最可能来源是微分反馈。
如果微分增益过高,噪音电压会被输入到电机里。
为保护您的电机,请将您的信号频带限制控制在 50Hz以内。
(2)谐波传动器#1谐波驱动器#1 使用谐波传动器LLC 生产的CS-14-100-1U-CC-SP 谐波减速箱。
混凝土泵车液压柔性臂架动力学分析与控制
东北大学
硕士学位论文
混凝土泵车液压柔性臂架动力学分析与控制
姓名:张婧
申请学位级别:硕士
专业:机械电子工程
指导教师:刘杰
20060101
东北大学硕士学位论文第四章系统动力学分析与数值仿真
求解器的计算时间主要由方程求解、分析雅可比矩阵和数值计算雅可比矩阵三部分时间组成。
实际工作中,用户采用MEBDFDAE求解器对所求问题进行数值仿真可以在FortranPowerStation4.0环境下进行。
FortranPowerStation40是基于Fortran90标准的Fortran应用程序的集成开发环境,可运行于Windows95及以上的操作系统中。
数值仿真的主要步骤如下:
(1)建立微分代数方程,并化为求解器需要的形式;
(2)通过在FortranPowerStation4.0环境下采用Fortran语-k编制求解程序,对建立的DAE方程进行程序输入,在此程序中要调用MEBDFDAE求解器文件,将编制的程序保存为文件:
(3)建立项目ProjectWorkspace,将MEBDFDAE求解器文件及(2)中编制的程序文件添加到项目当中,对(2)中编制的程序文件进行编译、链接、执行,最终计算结果以.dat的形式输出。
(41将输出的计算数据绘成图形,进行分析。
FortranPowerStation4.0环境下仿真工作窗口如图42所示。
图4.2FortranPowerStation4.0环境下仿真工作窗口
Fig.4.2SimulatingworkwindowunderFortranPowerStation4.0。
基于特征模型的柔性关节机械臂的控制

模 型 ,并 把 控 制 和 建 模 集 中 考 虑 ,为 高 阶 、参 数 未 知 的 对 象
v r i g d fe e c q ain n d te c a a trsi o e a e o  ̄o o e i l o n n iuao o i e t a yn i r n e e u to ,a h h r ce itc m d lb s d c n l ff x be 1 it ma p ltr c mb n d wi1 i l l
基 于 特 征模 型 的柔 性 关 节 机 械 臂 的控 制
机械臂的研究与发展

机械臂的控制系统
控制系统构成:包括控制器、伺服 驱动器、传感器等部件,用于实现 机械臂的运动控制和位置控制。
控制系统应用:在工业自动化、航 空航天、医疗等领域得到广泛应用, 提高了生产效率和安全性。
添加标题
添加标题
添加标题
添加标题
控制策略:采用基于运动学和动力 学模型的轨迹规划和控制算法,实 现高精度、高稳定性的运动控制。
提高生产效率:机械臂在工业生产中的应用将进一步扩大,提高生产效率,降低成本。 改善生活质量:机械臂在医疗、助残等领域的应用将更加广泛,为人类带来更便捷的 生活体验。
创造就业机会:随着机械臂产业的不断发展,将产生更多的相关就业机会,促进经济发展。
推动科技创新:机械臂的发展将促进相关技术的不断创新和进步,推动科技发展。
添加标题
添加标题
添加标题
医疗保健:机械臂在医疗保健领域 中用于手术辅助、康复训练和假肢 装配等方面,提高了医疗服务的水 平和效率。
军事领域:机械臂在军事领域中用 于无人作战系统和特种作战装备等 方面,提高了军事行动的效率和安 全性。
机械臂的研究意义
提高生产效率:机械臂能够快速、准确地完成重复性工作,提高生产效率。
仿生机械臂的控制算法研究:借鉴生物神经系统的控制原理,优化机械臂的运动规划 和协调控制。
仿生机械臂的应用前景:在医疗、救援、军事等领域具有广泛的应用前景,为人类带 来更多的便利和安全。
机械臂与人机交互的研究进展
机械臂在人机交互中的应用:提高生产效率、安全性及灵活性
最新人机交互技术:利用传感器、机器学习等技术实现更自然、直观的交 互
未来发展趋势:随着人工智能和物 联网技术的发展,机械臂的控制系 统将更加智能化、网络化、柔性化。
柔性关节机械臂的控制及仿真

CONTROL AND SIMULATION OF MANIPULATOR
WITH FLEXIBLE JOINT
作者: 夏小品[1] 王海[2]
作者机构: [1]安徽工程大学机械与汽车工程学院,安徽芜湖241000 [2]安徽工程大学先进数控和伺服驱动技术安徽省重点实验室,安徽芜湖241000
出版物刊名: 巢湖学院学报
页码: 59-63页
年卷期: 2012年 第6期
主题词: 柔性关节 Lagrange方程 Backstepping控制 simulink仿真
摘要:机械臂的关节柔性是影响机械臂动态精确度和稳定性的重要因素。
必须考虑机械臂关节柔性对精度的影响,精确的关节动力学模型是机械臂系统设计、分析和控制的基础。
本文以二自由度机械臂为研究对象,运用Lagrange方法建立了考虑关节柔性的动力学方程,并针对单连杆设计Backstepping控制律,同时给出了李雅普洛夫稳定性证明,最后基于simulink进行了仿真,验证了控制器设计的合理性。
基于观测器的柔性关节机械臂滑模控制

基于观测器的柔性关节机械臂滑模控制黄华;李光;林鹏;杨韵;李庆【摘要】柔性机械臂在运动过程中会产生如扭曲、弹性、剪切等形变,给柔性机械臂的分析和控制带来困难。
为了满足柔性机械臂高性能的控制要求,提出将基于观测器的滑模控制方法用于柔性机械臂中,设计一个观测器观测柔性机械臂系统各个状态变量,并且采用滑模变结构设计控制器。
仿真结果表明,基于观测器的柔性关节机械臂滑模控制方法能够很好地观测到系统各个状态变量,且状态估计误差趋近于零,满足柔性臂的快速跟踪性要求,具有很好的实践意义。
%Flexible manipulator arm occurs twisted, elastic and shearing deformations in the process of movement, which brings difficulty to its analysis and control. In order to meet the requirements of high performance control of flexible arm, proposes the observer-based sliding mode control method for flexible manipulator, designs an observer to monitor the state variables of flexible manipulator arm system, and applies sliding mode variable structure to design the controller. The simulated result shows that the proposed method does well in observing the variables of the system and the state estima-tion error approaches to zero, which meets the fast tracking of flexible arm, and has good practical significance.【期刊名称】《湖南工业大学学报》【年(卷),期】2014(000)001【总页数】5页(P62-66)【关键词】柔性机械臂;滑模控制;状态观测器【作者】黄华;李光;林鹏;杨韵;李庆【作者单位】湖南工业大学电气与信息工程学院,湖南株洲 412007;湖南工业大学机械工程学院,湖南株洲 412007;湖南工业大学机械工程学院,湖南株洲412007;湖南工业大学机械工程学院,湖南株洲 412007;湖南工业大学机械工程学院,湖南株洲 412007【正文语种】中文【中图分类】TP368.4目前,关于机械臂的研究主要集中在机械臂是刚性的情况,但实际应用中,空间机械臂由于质量轻、体积小,所以必须考虑机械臂的柔性才能取得良好的控制精度和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柔性机械臂的控制技术研究
随着科技的发展,机械臂在工业、医疗、探险等领域得到了广泛应用。
然而,
在某些特定场景下,刚性机械臂无法满足工作需要。
这时,柔性机械臂便成为了不可或缺的工具。
柔性机械臂具有纤细、精度高、便携等特性,适用于狭小空间、弯曲路径的作业等。
而柔性机械臂的控制技术则是保证其高效工作的基础。
一、柔性机械臂的特点
与刚性机械臂相比,柔性机械臂不同在于其结构。
柔性机械臂采用可变形、可
伸缩、可弯曲的柔性杆件,具有更广阔的应用范围。
柔性机械臂一般由伸缩机构、跟踪控制器、执行器等组成。
算上机械臂末端的工具,这些组件都是可柔性调整的。
二、柔性机械臂的控制技术研究
柔性机械臂的控制技术包括硬件系统、控制程序和力传感器等方面。
控制程序
的设计主要包括运动规划、轨迹跟踪、控制算法等。
柔性机械臂的受力学特性复杂,不同于刚性机械臂,其面临自身重力、非线性
摩擦等问题。
传统控制方法上的误差会导致机械臂位置、力矩等不稳定。
因此,柔性机械臂的控制技术是具有挑战性的领域。
针对柔性机械臂的非线性和多变性特征,研究者采用基于人工神经网络的控制
方法。
这种方法的优势在于,机器具有自我学习的特性,且在实际应用中具有较高的鲁棒性。
而且,增量式学习可以让机器在实际工作中不断优化自我控制程序,不断提高工作效率。
同时,研究者还关注力传感器技术的应用。
力传感器会将机械臂末端施加的力
矩进行测量,从而实现对机械臂末端的力控制。
采用力控制的柔性机械臂可克服自身多变性,能够实现精确的工作操作。
三、柔性机械臂应用
基于现有技术,柔性机械臂可应用于各种领域。
在食品加工装配等工业领域,柔性机械臂能够实现复杂、繁琐的操作。
其在装上机器人、捡取食品等一系列操作时,能够提高生产效率,减少产品被损坏的可能性。
在探险、勘察等非工业领域,柔性机械臂由于其细小形状、可弯曲的手臂,在某些狭小的空间中能够实现测量以及捕捉目标等功能。
四、未来展望
随着技术的持续发展,柔性机械臂的控制技术将不断提高。
我们可以预见,在更繁琐、更狭小、更危险的环境中,柔性机械臂将逐渐取代刚性机械臂,成为各种领域的主流工具之一。
总之,柔性机械臂的发展史可以追溯到上世纪八十年代,其采用可变形、可伸缩、可弯曲的柔性杆件,弥补了普通刚性机械臂的不足。
随着科技的进步,柔性机械臂的控制技术将不断提高,其应用范围也会越来越广泛。