火车测速
城市轨道交通的列车测速方法

城市轨道交通的列车测速方法
城市轨道交通的列车测速方法有以下几种:
1. 风速法:通过测量列车运行过程中所产生的气流速度来估算列车速度。
这种方法一般通过在列车上或轨道旁边安装风速仪来进行测量,然后通过分析风速数据来计算列车速度。
2. 电磁感应法:通过在轨道上安装一系列的电磁感应器,通过测量列车通过时所产生的电磁信号来确定列车速度。
这种方法可以精确地测量列车速度,并且对列车运行过程中的变化能够感知。
3. GPS测速法:通过在列车上安装GPS设备,通过接收卫星信号来测量列车的位置和速度。
这种方法可以提供精确的列车速度数据,并且具有较高的可靠性。
4. 轮轨力测速法:通过测量列车轮轨之间的力来计算列车速度。
这种方法一般通过在轨道上安装一系列传感器来测量列车轮轨之间的力,并通过分析力的大小和方向来确定列车速度。
这些测速方法可以单独或组合使用,具体选择方法取决于具体的测速需求和条件。
霍尔测速原理
霍尔测速原理霍尔测速原理是一种基于霍尔效应的测速方法,它利用了磁场对电荷运动的影响,通过测量电荷在磁场中的运动速度来确定物体的速度。
这种测速方法具有精度高、响应快、可靠性强等优点,被广泛应用于工业、交通、航空等领域。
霍尔效应是指在磁场中,电荷载流子受到洛伦兹力的作用而发生偏转,从而在垂直于磁场方向上产生电势差的现象。
这种现象是由于电荷载流子在磁场中受到的洛伦兹力与载流子自身的电场力相平衡而产生的。
霍尔效应的大小与磁场强度、电荷载流子的种类和密度、载流子的速度等因素有关。
利用霍尔效应进行测速的原理是,将一个霍尔元件安装在被测物体上,当物体运动时,霍尔元件中的电荷载流子也会随之运动,从而在元件的两端产生电势差。
根据霍尔效应的原理,这个电势差与物体的速度成正比,因此可以通过测量电势差的大小来确定物体的速度。
为了提高测速的精度和可靠性,通常会采用多个霍尔元件进行测量,并将它们的输出信号进行合成。
这样可以消除单个元件的误差和干扰,提高测量的准确性。
此外,还可以采用数字信号处理技术对输出信号进行滤波、放大、数字化等处理,进一步提高测量的精度和稳定性。
霍尔测速原理在工业、交通、航空等领域有着广泛的应用。
例如,在汽车、火车、飞机等交通工具中,可以利用霍尔测速原理来测量车辆的速度和加速度,从而控制车辆的行驶和制动。
在工业生产中,可以利用霍尔测速原理来测量机器的转速和线速度,从而控制生产过程的稳定性和质量。
在航空航天领域,可以利用霍尔测速原理来测量飞机的速度和高度,从而保证飞行的安全和稳定。
霍尔测速原理是一种基于霍尔效应的测速方法,具有精度高、响应快、可靠性强等优点,被广泛应用于工业、交通、航空等领域。
随着科技的不断发展,霍尔测速技术也将不断完善和发展,为人类的生产和生活带来更多的便利和效益。
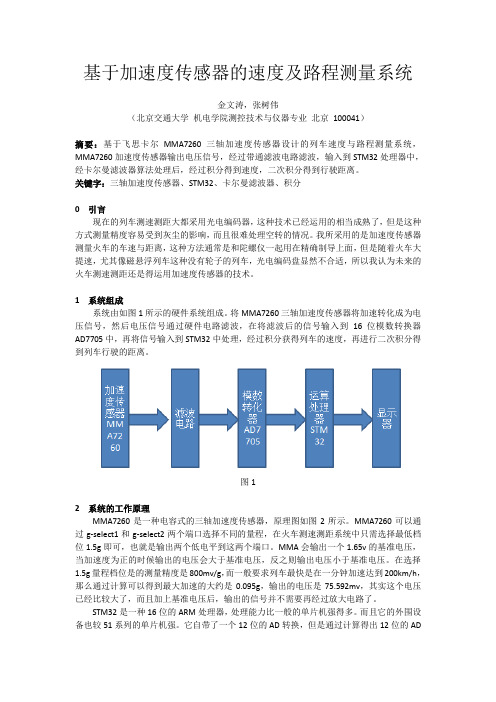
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
测速度的几种方法

③
点评:激光器、传感器、计算机终端显示技术都属于高科技 ,但最终解决问题的关键是圆盘的圆周运动和激光器沿半径方 向匀速运动的等时性处理问题。
八、激光扫描测车速
[例](2000年全国高考题)一辆实验小车可沿水平地面(图中纸
面)上的长直轨道匀速向右运动。有一台发出细光束的激光器 装在小转台M上,到轨道距离MN为d=10m,如图2所示。转 台匀速转动,使激光束在水平面内扫描,扫描一周的时间 T=60s,光速运动方向如图中箭头所示。当光速与MN的夹角
练习:如图所示为一小球作平抛运动的闪光照片的一部
分,图中背景方格的边长均为5cm,g=10m/s2,求:
(1)闪光频率; (2)小球运动的初速度的大小; (3)小球经过B点时的速度大小. (4) 抛点坐标。
测量原理分析: 解:设闪光的周期为T,小球在竖直方向做自由落
体运动且AB间竖直高度为3格,BC间竖直高度是5格,
v1 d t1
d t2
, 过光电门2的速度
v2
.若还已知
当地的重力加速度g和两个光电门之间的距离L以 及木板与水平面夹角α,则还可测木板表面动摩 擦因数。
像打点计时器一样,光电计时器也是一种研究物体运动情况
的常用计时仪器,其结构如图9所示,a、b分别是光电门的
激光发射和接收装置,当有物体从a、b间通过时,光电计时 器就可以显示物体的挡光时间。从而求出物体经过这一位置 时的速度
图 8-2-9
点评:纸带处理方法:用平均速度计算瞬时速 度,用逐差法计算加速度.
测量原理分析: 解析:某中间时刻的瞬时速度等于对应这段时间内的平均
s3+s4 8.33+8.95 - 速度,故 vA= 2T = ×10 2 m/s=0.86 m/s 2×0.10 用逐差法来计算加速度,有 s4+s5+s6-s1+s2+s3 a= 9T2 8.95+9.61+10.26-7.05-7.68-8.33 -2 2 = × 10 m/s 9×0.102 =0.64 m/s2.
常州测速地点

G104溧阳段,具体位置:1225.3-1226.1KM;1229.6-1231.7KM;1237.5-1239.9KM。
S239溧阳段,具体位置:65.2-65.7KM;87.4-89.3KM;98.35-99.85KM;100.9-102.4KM。
S239金坛段,具体位置:56.44-57.45KM。
S239武进段,具体位置:成章十字路口、湟里集镇段(两处)、闵市岗亭段、夏溪集镇段。
S239新北段,具体位置:5.9-6.9KM。
S240金坛段,具体位置:11.5-15KM;0.8-1.1KM。
S340金坛段,具体位置:105.8-107.2KM;107-110KM;139.2-142.3KM;134.2-139.2KM。
S340武进段,具体位置:邹区新街集镇段、泰村集镇段、卜弋集镇段。
S241金坛段,具体位置:63.9-65.2KM;76.25-79KM;48.3-57.2KM;50.4-52.3KM。
G312武进段,具体位置:遥观集镇段;邹区灯具城卡口。
S342武进段,具体位置:雪堰集镇段、潘家集镇段、漕桥集镇段。
S232武进段,具体位置:运村街镇段、101KM漕桥治安检查站。
S230武进段,具体位置:雪堰集镇段。
S338新北段,具体位置:孟河镇段。
机场路,具体位置:7.3KM;龙江路,具体位置:由南向北5.6KM处;长江路,具体位置:全路段;黄河路,具体位置:全路段;河海路,具体位置:全路段;汉江路,具体位置:全路段;通江大道,具体位置:全路段;星港路,具体位置:全路段;运河路,具体位置:4-14KM;龙江中路,具体位置:常锡路—城北干道;青洋路,具体位置:外环路口—河海中路;城北干道,具体位置:青洋路口—金鸡桥;常戚路,具体位置:政成桥、青洋路口;延陵东路,具体位置:全路段;东方大道,具体位置:戚区段;常戚路,具体位置:戚区段。
2007年9月新增的33套电子警察监控范围包括:闯红灯、压黄线、违法掉头、走非机动车道、不按规定车道行驶、违反禁令标志、超速等,具体路口、路段如下:1、同济桥南侧;2、局前街鹤园弄口;3、关河中路怡康花园段;4、文化宫中联路段;5、晋陵中路叉路口;6、和平北路琢初桥路口;7、竹林路飞龙东路口;8、关河中路永宁路口;9、三角场;10、五角场;11、青洋北路;12、青洋中路中吴大道口;13、青洋中路采菱路口;14、青洋中路东方西路口;15、洋中路龙城大道口;16、邮电路西横街路口;17、东方西路大明路口;18、东方东路东城路口;19、东方东路革新路口;20、延陵东路徐窑路口;21、东方东路中段;22、晋陵中路龙城大道口;23、232省道新四路口;24、239省道122省道口;25、338省道龙江路口;26、338省道龙魏线路口;27、黄河路玉龙路口;28、河海路玉龙路口;29、338省道长江路口;30、338省道中段;31、黄河路汤庄路段;32、239省道中段;33、232省道中段。
诸暨市固定式测速点公布

关于公布固定式交通技术监控设备设置点的公告根据《道路交通安全违法行为处理程序规定》(公安部第105号令)第十六条第二款规定,现将诸暨市辖区道路固定式交通技术监控设备设置地点公布如下:一、测速卡口系统设置地点(25处)绍大线26k+400M 枫桥旺妙 绍大线42k+700M 高湖下樟 杭金线53k+300m 次坞集镇 杭金线67k+700m 十二都检查站 杭金线76k+800m 李家磨加油站 杭金线85k+750m 王家井镇凉风洞村杭金线87k+700M 安华镇丰江周村 杭金线105k+500m 安华镇上新宅村市南线五纹岭村地段 诸东线5k+300m(金属回收公司仓库地段) 绍大线48k+900m(原十里牌收费站地段) 市区城北路 (暨阳街道城北办事处江龙村地段)绍大线63k+400m(钟娄桥附近地段) 十诸线5k+300m(平安汽车修理厂地段) 市区环城北路(天马学校背后地段)市区艮塔西路(原工业新城派出所地段)市区耀江隧道外(庙湖村地段)以上17处已经公告启用十店线0k+300m(应店街镇留下庄村地段)城西开发区二环北路城西开发区千禧路 南环线碑亭社区地段诸齐线8KM 王家井镇江下村 诸安快速通道新光村地段 市区五纹岭隧道口东侧 市区五纹岭隧道口西侧以上8处将于2010年9月1日起启用二、市区交通违法监测系统设置地点(44处)艮塔路与浣沙北路路口艮塔路与暨阳路路口 艮塔东路的滨江中路路口 苎萝路与人民南路路口艮塔西路与朱公湖路路口 环城东路与苎萝东路路口 二环东路与暨东路路口城北路袁家立交路口 艮塔东路与江东路路口 艮塔东路与高湖路路口以上10处已经公告启用环城北路与友谊路路口环城北路与詹家山路路口 环城北路朱公路路口 环城北路与春江路路口环城东路与滨江北路路口 环城东路与高湖路路口 暨东路与永兴路口路口环城东路与暨东路路口 环城东路与南环线路口 艮塔西路与越都路路口艮塔西路与西二环路路口 艮塔西路与环城西路路口 艮塔西路与跨湖路路口 艮塔西路与友谊路路口 艮塔东路与苎萝东路路口艮塔东路与南环线路口 永昌路与东江路路口 永昌路与滨江北路路口暨阳北路与浣沙北路路口 大桥路与浣沙北路路口大桥东路与滨江中路路口 西施大街与浣沙中路路口 二环北路与二环西路路口 二环北路与城北公路路口 二环北路与千禧路路口 二环东路与高湖路路口 二环东路与苎萝东路路口 二环东路与南环线路口 二环西路与望云西路路口 苎萝路与陶朱路路口苎萝东路与浣沙南路路口 人民北路与艮塔路路口 环城北路与千禧路路口暨东路公共交易服务中心路口以上34处将于2010年9月1日起启用三、路段无人值守监控系统设置地点(2处)十店线七处无人值守监控系统(已经公告启用)诸暨至安华快速通道十二处无人值守监控系统(将于2010年9月1日起启用)特此公告诸暨市公安局交通警察大队2010年8月19日诸暨市测速点(请大家补充)二环线:福田花园往街亭方向也有一只;刚过跨湖桥有移动测速火车站回来后在海关附近路段有移动测速下高速到车管所附近有测速杭金线安华加油站边上有“移动测速”十诸线刚出海越隧道往十二都方向下坡也有测速三都高速路桥下有移动测速环城北路上海城附件(固定测速)垦塔西路城西派出所附近(固定测速)诸暨钟娄桥附近(固定测速)诸湄线:移动测速1、到五浦头加油站,6车道变2车道路段不到500处,刚过固定测速不远处,诸湄线4KM+500米处。
测量速度的18种方法

测量速度的18种方法新课程改革的推进和高考改革的不断深入,高考命题更加注重新课程理念的领航作用,“考试内容要实现与高中新课程内容的衔接,进一步贴近时代、贴近社会、贴近考生实际,注重对考生运用所学知识分析问题、解决问题能力的考查。
”这是适应新课程改革的新考试观的核心内容,这更是新高考的命题方向。
从近年高考命题来看,试题越来越体现这一新考试观的核心内容。
而这一类问题的选材灵活,立意独特新颖,要求考生能从物理情境中研究对象和物理过程,建立物理模型,利用相应的规律来解决实际问题。
速度是描述物体运动快慢的物理量,在日常生活、社会实践和科学实验中,需要对某些物体的速度进行测量,如交通车辆的速度,子弹的速度,流体的流速,声、光的传播速度等等,那么速度测量方法有几种方法呢?笔者对此作了归纳总结如下,以培养学生创造性思维和发散性思维能力。
1.利用计时器测速度利用电磁打点计时器(电火花计时器)在与运动物体相连的纸带上打点(孔)以记录运动物体在不同时刻的位置,用刻度尺测出纸带某点与相邻点(计数点)间的距离,利用计算得出匀变速直线运动物体的速度。
例1(09·广东理基卷 -18)“研究匀变速直线运动”的实验中,使用电磁式打点计时器(所用交流电的频率为50Hz),得到如图1所示的纸带。
图中的点为计数点,相邻两计数点间还有四个点未画出来,下列表述正确的是A.实验时应先放开纸带再接通电源B.(S6一S1)等于(S2一S1)的6倍C.从纸带可求出计数点B对应的速率D.相邻两个计数点间的时间间隔为0.02s解析:在“研究匀变速直线运动”的实验中,实验时应先接通电源再放开纸带,A错.根据相等的时间间隔内通过的位移有 ,可知(S6一S1)等于(S2一S1)的5倍,B错.根据B点为A与C的中间时刻点有 ,C对.由于相邻的计数点之间还有4个点没有画出,所以时间间隔为0.1s,D 错.点评:利用方法测定匀变速直线运动物体的速度在力学实验中经常用到,提醒考生要掌握此方法。
激光测速的原理

激光测速的原理激光测速是一种常见的测量目标速度的技术。
它通过发射激光束,测量激光束的反射时间来计算目标的速度。
激光测速器通常使用激光二极管或半导体激光器作为光源,通过使用光电探测器来检测激光束的反射。
激光测速器的原理可以分为两个步骤:激光发射和激光接收。
在激光发射过程中,激光测速器通过向目标物体发射激光束。
激光束的发射是由激光二极管或半导体激光器产生的。
这些激光器产生的激光束是单一波长的,能够聚焦成一束精确的光束。
激光束的波长越短,测量的精确度越高。
在激光接收过程中,激光测速器通过使用光电探测器检测激光束的反射。
光电探测器位于射出激光束的同一位置,接收目标物体反射的激光束。
光电探测器可以将光信号转换为电信号,这使得电子设备可以对接收的激光信号进行处理和分析。
激光测速器使用了激光的时间测量原理。
当激光束射到目标物体上时,激光束会反射回到激光测速器的光电探测器上。
激光的速度是已知的,通常为光速的速度。
所以当激光束射回到激光测速器上时,可以测量到从激光发射到接收的时间差,也就是激光的往返时间。
通过测量激光的往返时间,可以计算目标的速度。
计算公式为:速度=距离/时间。
在激光测速器中,距离是已知的,即激光束射到目标和射回到激光测速器之间的距离。
而时间是通过测量激光往返时间得到的。
通过将已知的距离除以测得的时间差,可以得到目标的速度。
在实际应用中,激光测速器通常用于交通执法和测速仪器。
在交通执法中,激光测速器可以用来测量车辆的速度,以确保车辆在规定的速度范围内行驶。
激光测速器还可以用于测量飞机、火车和船只的速度。
激光测速具有许多优点。
首先,激光测速器可以非常精确地测量目标的速度。
其次,它可以在不接触目标的情况下进行测量,因此减少了对目标的干扰。
此外,激光测速器体积小巧,操作简便,适用于各种环境和场合。
然而,激光测速器也存在一些限制。
首先,它对目标的表面材质和颜色敏感。
仅当目标的表面对激光具有一定的反射能力时,激光才能被正确地反射回测速器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高铁测速方法:
1、使用高铁测速雷达,一种用于铁路客运或货运车辆监测的终端设备,通过检测铁路线路上的行驶车辆,向驾驶员或调度员提供车辆的实时速度、以及距监测设备的实际距离信息,从而提示其控制车辆行驶速度,防止碰撞发生。
2、轮轴脉冲转速传感器
转速传感器的种类很多,有磁电式、光电式、离心式、霍尔式等转速传感器。
其中轮轴脉冲转速传感器在高速铁路中应用较为广泛。
轮轴脉冲转速传感器测速的基本工作原理:利用车轮的周长作为“尺子”测量列车走行距离,根据所测距离测算列车运行速度,其基本公式为:
V=πDn/3.6
式中,π=3.14,D为车轮直径,n为车轮转速。
从上式可知,测量列车速度就是检测列车车轮转速和列车轮径。
脉冲转速传感器安装在轮轴上,轮轴每转动一周,传感器输出一定数目的脉冲,使脉冲频率与轮轴转速成正比。
输出的脉冲经隔离和整形后直接输入计算机CPU进行频率测量,再经换算从而得出车组速度和走行距离闭。
3、惯性加速度传感器
加速度传感器是一种能够测量加速力的电子设备。
加速力是物体在加速过程中作用在物体上的力,可以是常量或变量。
一般加速度传感器根据压电效应原理工作,加速度传感器利用其内部由于加速度造成的晶体变形产生电压,只要计算出产生的电压和所施加的加速度之间的关系,就可将加速度转化成电压输出。
还有很多其他方法制作加速度传感器,如电容效应、热气泡效应、光效应,但其最基本的原理都是由于加速度使某种介质产生变形,通过测量其变形量并用相关电路转化成电压输出。
轮轴脉冲转速传感器也存在一定缺陷:即车轮空转或打滑会使列车速度的测量结果存在误差,为解决此类问题,在列车车轴上加装一个加速度传感器,配合脉冲转速传感器使用。
该方式工作原理:在列车打滑期间,把机车的内加速度作为测速的信息源,该信息与车轮旋转的状态等信息不相关,而在其余工作时间仍用轮轴脉冲传感器测速,所以该方式称为基于惯性加速度传感器的测速。
在车轮打滑时,由加速度传感器测得加速度及车轮打滑前加速度的倾斜分量,而计算出车轮打滑时的列车运行加速度,再将该值积分即得车轮打滑时列车实时运行的速度。