汽车操纵稳定性试验。朱清源共33页文档
汽车操纵稳定性实验指导书
汽车操纵稳定性实验指导书课程编号:课程名称:实验一汽车转向轻便性实验实验目的汽车的转向轻便性和操纵稳定性是现代汽车重要的使用性能,通过对实验了解和掌握测试系统的安装调试、基本实验方法并学会数据处理和运用理论知识对汽车操纵稳定性研究、评价。
以培养学生解决实际工程问题的能力。
二、实验的主要内容了解测试系统的组成和测试原理,汽车转向轻便性实验的数据的实时采集和处理。
测定汽车在低速大转角时的转向轻便性,与操纵稳定性其他试验项目一起,共同评价汽车的操纵稳定性。
采集测量变量及参数方向盘转角;方向盘力矩;方向盘直径。
三、实验设备和工具1.测量仪器汽车方向盘转角——力矩传感器汽车操纵稳定性数据采集和分析仪2.实验车辆小型客车一辆3.标明试验路径的标桩16个。
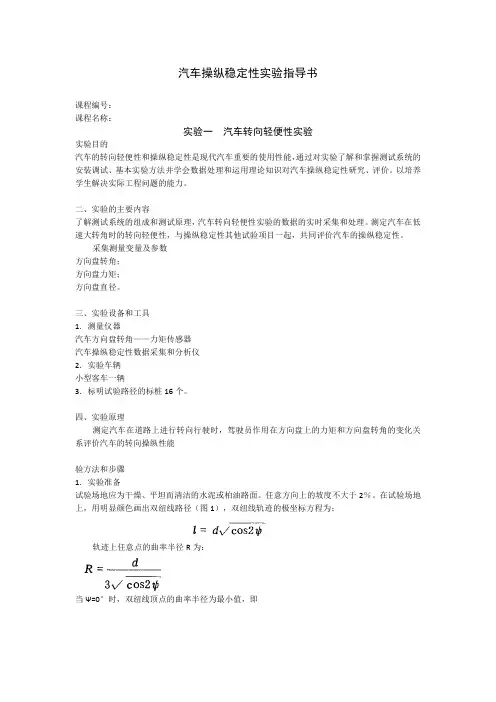
四、实验原理测定汽车在道路上进行转向行驶时,驾驶员作用在方向盘上的力矩和方向盘转角的变化关系评价汽车的转向操纵性能验方法和步骤1.实验准备试验场地应为干燥、平坦而清洁的水泥或柏油路面。
任意方向上的坡度不大于2%。
在试验场地上,用明显颜色画出双纽线路径(图1),双纽线轨迹的极坐标方程为:轨迹上任意点的曲率半径R为:当Ψ=0°时,双纽线顶点的曲率半径为最小值,即双纫线的最小曲率半径(m)应按试验汽车的最小转弯半径(m)乘以倍,并圆整到比此乘积大的一个整数来确定。
并据此画出双纽线,在双纽线最宽处、顶点和中点(即结点)的路径两侧共放置16个标桩(图1)。
标桩与试验路径中心线的距离,按汽车的轴距确:定,当试验汽车轴距大于时,为车宽一半加50cm,当试验汽车轴距小于或等于2m时,为车宽一半加30cm。
图1 双纽线路径示意图2.试验方法2.1接通仪器电源,使之预热到正常工作温度。
2.2汽车以低速直线滑行,驾驶员松开方向盘,停车后,记录方向盘中间位置及方向盘力矩零线。
2.3驾驶员操纵方向盘使汽车沿双纽线路径行驶。
车速为10土1km/h。
待车速稳定后,开始记录方向盘转角及力矩,并记录(或显示)车速作为监督参数,直到汽车绕双纽线行驶满三周。
车辆操纵稳定性(整理版)
2
r
t
B0 0 02
Ce0tsin t
r
t
r
s
0
1
mua Lk2
2
02
2mua0
Lk2
1
1
1 2
e0tsin t
当t
时,e0t
0,r
r
s
0
r0
r
t
r
s
0
1
mua Lk2
2
02
2mua0
Lk2
1
1
1 2
e0t
sin
t
在达到稳态的之前,(r t)是衰
r
r0 3
4
由于正常的汽车都具有小阻尼的瞬态响应,当ζ<1时
r
t
B0 0 02
Ce0tsin
0
1 2t
令 0 1 2
r
t
B0 0 02
A1e0t cos t
A2 e 0t sin t
由运动起始条件确定积分常数C、A1、A2
t
0时,wr
0, v
0,
0 , wr
ak10
IZ
B1 0
R/R0>1,K>0 , 不足转向;
R/R0<1, K<0, 过多转向。
几个表征稳态响应的参数
3)静态储备系数S.M. 1)前、后轮侧偏角绝对值之差α1-α2 2)转向半径的比FRY/1R0
汽 静态储备系数 S.M.:中性
车
质 转向点到前轮的距离a与
心
汽车质心到前轴距离 a 之
中 差与轴距L之比。
mv
ur
ak1
bk2
操纵稳定性(DOC)
侧倾角测试标准试验评价:操稳试验评价1.目的2.试验准备3.测量仪器4.测试阶段5.评估6.分析7.操控性8.驾驶性9.评估表1.目的在主观评估中,驾驶员不仅是车辆系统中的控制单元,也同时作为测量仪器对车辆性能特性进行主观感受及评估。
该方法不仅将驾驶特性测试及具体驾驶性能测试结合,而且将驾驶特性与驾驶安全性联系在一起。
然而因为该方法不是基于客观测量,其再现性和准确性存在局限。
2. 评估前工作2.1 准备定义评估主题2.2 试验条件根据测试跑道,路面情况和车辆载荷2.3 测试时期和评估的持续时间2.4 明确评估区间(例如其他车辆作为对比对象,竞争对手的车型等)2.5 必要的话,试验驾驶员可以澄清车辆问题3.测量设备3.1 标定速度表精确度:± 1 km/h。
3.2 测量表4.测试阶段测试阶段随计划而定。
5.评估5.1 根据评级系统进行评估5.1.1 根据评估方法,也可以应用隐蔽评级,例如:如果可能的话,无偏差评级。
5.1.2 通过两人进行评估。
6.分析6.1 平均值=试验结果6.2 通过使用足够数量的评估结果确定不规则值7.操控性描述7.1 总体安全性感受测试车辆的整体性依据驾驶安全性进行评估。
可操作性,合理布置及控制组件的功能性也同样需要评估(驾驶员的工作区)。
7.1.1 评估评估等级包括所有单独标准,例如起动性能,直线驾驶,回转性能,转向性能和制动性能。
被评估且结果过度高于或低于标准的个体标准不应被忽视或过于重视,取决于加重,例如频数及密度-考虑到安全性时评估总体安全性感受时。
7.1.2 车辆状况为达到真实的评估结果,以下参数应在评估项目进行前进行检查:规定轮胎气压,公差界限内的几何数值。
发布的底盘设备。
7.1.3 注释原则上操控性测试应在接近其他车辆的试验场跑道。
7.2 启动性能起动性能评估应包含以下方面的内容:起动下坐,车轮跳动,起动振动,牵引力,方向稳定性和方向盘反馈。
7.2.1 评估评估结果=起动标准的平均值7.2.2 行使条件正常起步和节气门全开-从静止开始加速,不同载荷情况,正向/逆向驾驶,干燥/潮湿/光滑路面。
第四章操纵稳定性试验
第四章 操纵稳定性试验第一节 概 述一、试验的基本原理汽车的操纵稳定性,指的是汽车在高速行驶下,接受驾驶员的控制能力及行驶方向稳定性。
进行汽车操纵稳定性研究时,是把汽车看作一个动力学系统(由质量、弹簧、阻尼二者构成),以便进行理论分析和试验研究。
其研究内容通常又称之为汽车横向动力学。
对汽车进行操纵稳定性研究,首先是研究转向输入下汽车的运动特性。
此时,是把汽车看成为一个多自由度动力系统。
在数学模型中,转向系根据研究的需要,又可看成单一自由度系统和二自由度(以上)系统两种情况。
研究转向盘位移输入下汽车的运动特性时,转向系通常看成为单一自由度,此时的转向输入又称之为固定控制输入。
属于这一类输入的试验方法有转向盘转角阶跃、脉冲、正弦输入等项目的试验。
研究转向盘力输入下汽车的运动特性时,转向系应看成至少二自由度,此时转向盘的位移是输出量,所以这种输入又叫做自由控制输入。
为这类研究设计的试验项目有转向盘力脉冲、转向盘回正能力试验等。
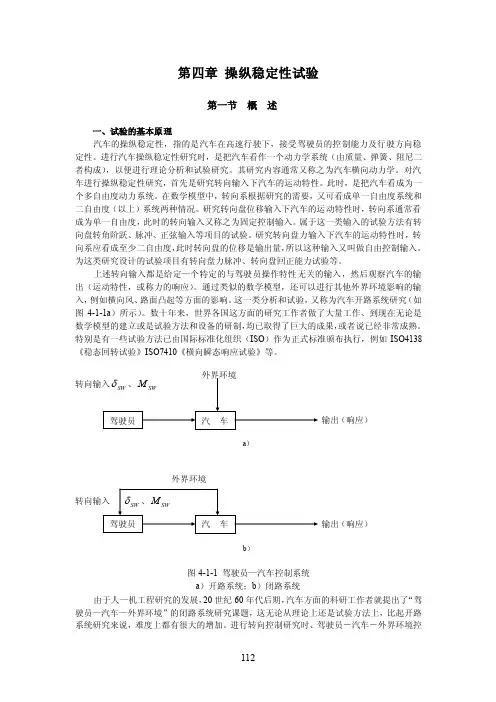
上述转向输入都是给定—个特定的与驾驶员操作特性无关的输入,然后观察汽车的输出(运动特性,或称力的响应)。
通过类似的数学模型,还可以进行其他外界环境影响的输入,例如横向风、路面凸起等方面的影响。
这一类分析和试验,又称为汽车开路系统研究(如图4-1-1a )所示)。
数十年来,世界各国这方面的研究工作者做了大量工作、到现在无论是数学模型的建立或是试验方法和设备的研制,均已取得了巨大的成果,或者说已经非常成熟。
特别是有一些试验方法已由国际标准化组织(ISO )作为正式标准颁布执行,例如ISO4138《稳态回转试验》ISO7410《横向瞬态响应试验》等。
a )b )图4-1-1 驾驶员—汽车控制系统a )开路系统;b )闭路系统由于人—机工程研究的发展,20世纪60年代后期,汽车方面的科研工作者就提出了“驾驶员—汽车—外界环境”的闭路系统研究课题,这无论从理论上还是试验方法上,比起开路系统研究来说,难度上都有很大的增加。
汽车操纵稳定性试验。朱清源解读共35页文档
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
16、业余生活要有意义,不要越轨。——华盛顿 17、一个人即使已登上顶峰,也仍要自强不息。——罗素·贝克 18、最大的挑战和突破在于用人,而用人最大的突破在于信任人。——马云 19、自己活着,就是为了使别人过得更美好。——雷锋 20、要掌握书,莫被书掌握;要为生而读,莫为读而生。——布尔沃
END
汽车操纵稳定性试验。朱清源解读
6
、
露
凝
无
游
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。
操纵稳定性、平顺性、通过性试验
上一页 下一页 返回
操纵稳定性、平顺性、通过性试验
(四) 汽车回正能力试验 汽车回正能力试验要在平坦的场地上进行。令汽车沿半径为
15 m的圆周行驶,调整车速使侧向加速度达4m/s2,然后 突然松开转向盘,在回正力矩作用下,前轮将要回复到直线 行 摆驶 角。 速记 度录ωr这,个整过理程出的ω时r-t间曲t线、。车速u、转向盘转角δsw和横 对于最高车速超过100km/h的汽车,还要进行高速回正性 能试验,试验车速为最高车速的70%。令汽车以试验车速 直线行驶,随后驾驶员转动转向盘使侧向加速度达到2 m/s2,然后突然松开转向盘作回正试验。 回正试验是表征和测定汽车自曲线回复到直线行驶的过渡过 程,是测定自由操纵力输入的基本性能试验。回正能力是汽 车操纵稳定性的一个重要方面,一辆没有回正能力的汽车, 或基本上回不到正中(即有较大一点的残余横摆角速度),或 回正过程中行驶方向往复摆动的汽车,驾驶员和乘客都是不 满意的。
试验中记录转向盘转角及转向盘转矩,并按双纽线路径每一周 整理出如图5-5-2所示的转向盘转矩-转向盘转角曲线。通常以 转向盘最大转矩、转向盘最大作用力及转向盘作用功等来评价 转向轻便性。
上一页 下一页 返回
操纵稳定性、平顺性、通过性试验
(二) 稳态转向特性试验
稳态转向特性试验的目的是测定汽车对转向盘转角输入达到 稳定行驶状态时汽车的稳态横摆响应。我国主要采用定转向 盘转角试验法。
上一页 下一页 返回
操纵稳定性、平顺性、通过性试验
(五) 转向盘角脉冲试验 通常以汽车横摆角速度频率特性来表征汽车的动特性。因此,
频率特性的测量成为一个重要的试验。这个试验要确定给转 向盘正弦角位移输入时,输出(汽车横摆角速度)与输入的振 幅比与相位差。通过直接给转向盘正弦角位移输入来测量汽 车的频率特性是很困难的,因为一方面准确的正弦输入难以 做到,而且要在几个固定车速下给转向盘以不同频率的正弦 输入也是很费时间的。所以,经常是用转向盘角位移脉冲试 验来确定汽车的频率特性。进行这种试验时,给等速行驶的 汽车-转向盘角位移脉冲输入,记录下输入的角脉冲与输出的 汽车横摆角速度,参看图5-5-4。通过求得输入、输出的富 氏变换,便可确定频率特性。
汽车操纵稳定性试验。朱清源解读
图11.14 回正试验几种过程曲线
• • •
(2)稳定时间:稳定时间由松开转向盘的时刻起,至汽车横摆 角速度到新稳态时为止转向盘输入; (3)残留横摆角速度:汽车横摆角速度新稳态值与零线之差即
为残留横摆角速度;
(4)自然频率:由于系统是多自由度的,横摆角速度并不是一 个严格的等圆周运动,相邻振幅的比值也不等于常数(图11.15)。
• 1)陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角
• 4)力矩及转角仪:测转向盘转角或力矩;
• 5)五轮仪、磁带机等。
• 稳态回转试验
• 1)试验目的:测定汽车的稳态转向特性及车身侧倾特性; • 2)试验方法:定转向盘转角连续加速法和定转弯半径法。
•
•
1.定转向盘转角连续加速法
为了试验有可比性,消除了初始圆周半径对稳态回转试验的
向盘上的力为一定值,当驾驶员松开转向盘的一瞬间,作用于转
向盘上的力由定值突然变为零。因此,实质上本试验也是转向盘 力阶跃输入的瞬态响应试验,在一定程度上还能反映汽车“路感 ”的好坏。
1.试验数据处理
在汽车转向回正试验中,汽车横摆角速度过渡过程曲线大致有 如图11.14所示的几种情况,其中曲线l、2为发散型,不进行数据处 理;曲线3~7为收敛型,进行数据处理。 • (1)时间坐标原点:由于惯性 作用,驾驶员松手后转向盘 不可能马上转动,因此,开 始一段显现出圆角形状(图 11.14中的AB),以往是将松 手前的一段直线与松手后的 直线部分进行曲线拟合的(图 11.14中的虚线部分),其交点 即为时间原点,但这样误差 较大,现改为:在微动开关 时间历程曲线上,以松开转 向盘时微动开关所做的标记 为时间坐标的原点。
驾驶员突然转动方向盘到一定的角度,再立即转回到原来位置,
汽车操纵稳定性试验共35页文档
谢谢!பைடு நூலகம்
汽车操纵稳定性试验
11、不为五斗米折腰。 12、芳菊开林耀,青松冠岩列。怀此 贞秀姿 ,卓为 霜下杰 。
13、归去来兮,田蜀将芜胡不归。 14、酒能祛百虑,菊为制颓龄。 15、春蚕收长丝,秋熟靡王税。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
新能源汽车试验学 第七章 操纵稳定性试验
LOGO 转向盘测力仪
一 试验设备
LOGO
惯性传感器
驾驶机器人
二 测量设备
LOGO
四轮定位仪
轴荷仪
静侧翻试验台
三 数据采集软件
LOGO
•设置数据采集系统的参数,对各个通道进行配置 •控制数据采集开始和结束 •实时显示各通道物理量的值 •将各个通道的物理量以数据文件的形式保存在存储 设备(硬盘或存储卡)中
五 试验场地
LOGO
•操稳道路试验一般车速较高,转弯半径较大,因此需要比较大的场 地
•通常在汽车试验场的直线性能跑道和操稳广场上进行,也可以在铺 装条件较好的飞机跑道上进行
•操稳场地条件比较好的几个试验场,例如: •通用广德试验场 •正新轮胎试验场 •重庆长安汽车试验场 •中汽中心盐城汽车试验场
15
±50 N·m ±100 N·m
±50 /s 0~50 m/s ±10 m/s
±15
±15
±15 m/s2
测量仪器的最大误差 ±2(转角≤180) ±4(转角>180) ±1 N·m ±3 N·m ±0.5 /s ±0.3 m/s ±0.4 m/s
±0.15
±0.5
±0.15 m/s2
一 试验设备
LOGO
第一节 概述
LOGO
•人-车开环系统 •人-车闭环系统
常用仪器 设备
第二节 常用仪器设备
图 整车操纵要求
测量变量
转向盘转角
转向盘力矩
汽车横摆角速度 汽车纵向速度 汽车横向速度 车身侧倾/俯仰
角 汽车质心侧偏角
汽车纵向/侧 向加速度
测量范围
±360
•有些软件可以对数据进行一些简单的预处理和计算 •例如:Dewesoft(左图)、VBOXTools(右图)
汽车操纵稳定性测试实验
操稳性测试
一、理论基础
3. 稳态响应与瞬态响应
1) 系统输入
给转向盘一个角位移输入,称为角位移输入;给 转向盘一个力矩输入,称为力矩输入。
2) 输入种类
有阶跃输入、正弦输入、脉冲输入3种。
阶跃
正弦
脉冲
xua
t
选
t
t
操稳性测试
一、理论基础
3. 稳态响应与瞬态响应
3) 时域响应
(1) 稳态响应:系统输入为周期性或恒定性的, 输出也是周期性或恒定性的,输入和输出之 间相对稳定。
不足转向 过多转向
δ 不变
汽车的三种 稳态转向特性
操稳性测试
一、理论基础
4.操纵稳定性的评价与试验方法
主观评价方法:让试验评价人员根据试验时自己 的感觉来进行评价,即感觉评价。
客观评价方法:通过仪器测出表征性能的物理量 如横摆角速度、侧向加速度、侧倾角及转向力来 评价汽车操纵稳定性,可用室内台架试验,测定 并评价有关操纵稳定的性质,也可通过道路试验, 计测汽车转弯和越线行驶的运动状态。
(2) 瞬态响应:从转向至稳态响应的中间过程, 即系统输入为周期性或恒定性而输出不是周 期性或恒定性,两者不保持相对稳定。
操稳性测试
一、理论基础
3. 稳态响应与瞬态响 应
4) 稳态转向特性
中性转向
不足转向、中性转向、过 多转向。
操纵稳定性良好的汽车应
具有适度的不足转向特性, 一般的汽车不应该具有过 多转向的特性。
本节主要内容:
简介汽车操纵稳定性能方面理论知识,操纵稳定 性能试验目的和要求,主要仪器设备及其工作原 理,实验步骤。
重点:基础理论、试验数据处理
操稳性测试
一、理论基础