汽车操纵稳定性实验指导书
汽车操纵稳定性验之稳态回转实验
汽车操纵稳定性验之稳态回转实验————————————————————————————————作者:————————————————————————————————日期:汽车操纵稳定性实验之稳态回转实验实验目的:测定汽车对转向盘转角输入达到稳定行驶状态时汽车的稳态横摆响应 学会用前、后侧偏角绝对值之差12()αα-以及转向半径的比0R R 来判别汽车的稳态响应实验仪器:垂直陀螺仪(VG400CD-100)实验车 汽车速度采集器实验条件:1. 实验汽车1.1 实验车是按厂方规定装备齐全的汽车,实验前,应测定车轮定位参数,对转向系、悬架系进行检查,并按规定进行调整、紧固和润滑。
1.2 实验时若用新轮胎,轮胎至少应经过200km 正常行驶磨合;若是旧胎,实验结束时,残留花纹高度应小于1.5mm 。
实验过程中,轮胎充气压力应符合该车技术条件规定,误差不得超过±10kPa 。
2.实验场地2.1 实验场地应为干燥、平坦且清洁的水泥或沥青路面,任意方向的坡度不大于2%2.2 实验时风速应不大于5m s2.3 大气温度在040-℃之间实验方法:1. 在实验场地上,画出半径为15m 的圆周1。
2. 接通仪器连线并开机预热至工作温度2。
3. 实验开始前,汽车以侧向加速度为23m s 的相应车速沿画定的圆周行驶500m 以使轮胎升温。
4. 驾驶员操纵汽车以最低稳定车速沿所画圆周行驶,此时转向盘得转角为sw 0δ;测定车速0u 以及横摆角速度0r ω。
由于车速很低,离心力很小,轮胎侧偏角忽略不计。
保持转向盘转角sw 0δ不变条件下,令汽车缓慢连续而均匀的加速(纵向加速度不得超过20.25m s ),直至汽车的侧向加速度达到26.5m s(或受发动机功率限制而所能达到的最大侧向加速度、或汽车出现不稳状态)为止。
纪录整个过程。
5. 实验按向左转和向右转两个方向进行,每个方向实验三次。
每次实验开始时车身应处于正中位置。
某车型操稳性实验标准流程
一、概述汽车操纵稳定性是高速汽车安全行驶的一个主要性能。
被称之为“高速车辆的生命线”,课题组依据合同书的要求,将汽车作为开路控制系统,依据国家GB/T 6323—1994《汽车操纵稳定性试验方法》,求出改进后汽车整车曲线行驶的时域响应和频域响应,根据试验结果,评价车辆的操纵稳定性能。
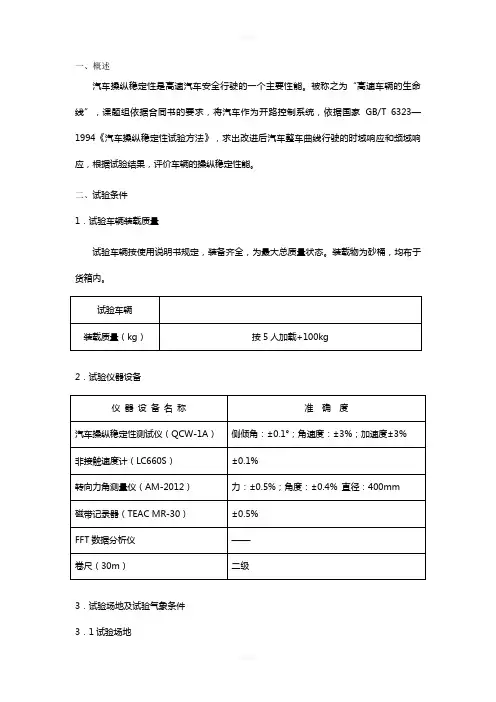
二、试验条件1.试验车辆装载质量试验车辆按使用说明书规定,装备齐全,为最大总质量状态。
装载物为砂桶,均布于货箱内。
2.试验仪器设备3.试验场地及试验气象条件3.1试验场地试验在交通部公路试验场进行。
试验场地路面状况如下:1.稳态回转2. 转向回正(低速)3.蛇形试验4.转向轻便性试验3.2试验气象条件三、试验依据标准GB/T 12534—1990 《汽车道路试验方法通则》GB/T 6323.1—1994 《汽车操纵稳定性试验方法蛇形试验》GB/T 6323.2—1994 《汽车操纵稳定性试验方法转向瞬态响应试验(转向盘转角阶跃输入)》GB/T 6323.3—1994 《汽车操纵稳定性试验方法转向瞬态响应试验(转向盘转角脉冲输入)》GB/T 6323.4—1994 《汽车操纵稳定性试验方法转向回正性能试验》GB/T 6323.5—1994 《汽车操纵稳定性试验方法转向轻便性试验》GB/T 6323.6—1994 《汽车操纵稳定性试验方法稳态回转试验》QC/T 480—1999 《汽车操纵稳定性指标限值与评价方法》四、试验结果1.蛇形试验结果见表1、表2、图5~图17蛇形试验标桩距离为30m, 标桩布置位置见图9,基准车速65km。
表1 蛇形试验----基准车速时试验结果表2 蛇形试验----主要性能参数试验结果50607080901001103035404550556065707580车 速(km/h)转向盘转角(º)图5 平均转向盘转角峰值与车速的关系0246810121416182022243035404550556065707580车 速(km/h)横摆角速度(º/s )图6 平均横摆角速度峰值与车速的关系12345673035404550556065707580车 速(km/h)侧向加速度(m /s 2)图7 平均侧向加速度与车速的关系01234563035404550556065707580车 速(km/h)车身侧倾角( º )图8 平均车身侧倾角与车速的关系图9 蛇形试验标桩布置图图10 蛇形试验时间历程 (V=60 km/h)TA:横摆角速度TB:方向盘转角。
汽车操纵稳定性实验指导书
汽车操纵稳定性实验指导书课程编号:课程名称:实验一汽车转向轻便性实验实验目的汽车的转向轻便性和操纵稳定性是现代汽车重要的使用性能,通过对实验了解和掌握测试系统的安装调试、基本实验方法并学会数据处理和运用理论知识对汽车操纵稳定性研究、评价。
以培养学生解决实际工程问题的能力。
二、实验的主要内容了解测试系统的组成和测试原理,汽车转向轻便性实验的数据的实时采集和处理。
测定汽车在低速大转角时的转向轻便性,与操纵稳定性其他试验项目一起,共同评价汽车的操纵稳定性。
采集测量变量及参数方向盘转角;方向盘力矩;方向盘直径。
三、实验设备和工具1.测量仪器汽车方向盘转角——力矩传感器汽车操纵稳定性数据采集和分析仪2.实验车辆小型客车一辆3.标明试验路径的标桩16个。
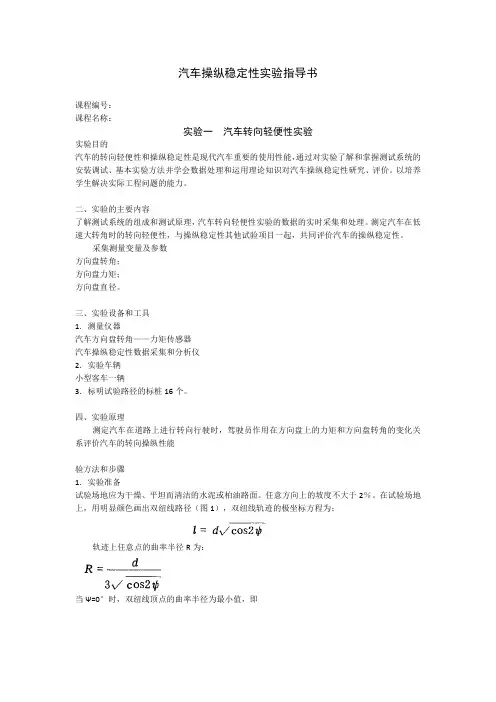
四、实验原理测定汽车在道路上进行转向行驶时,驾驶员作用在方向盘上的力矩和方向盘转角的变化关系评价汽车的转向操纵性能验方法和步骤1.实验准备试验场地应为干燥、平坦而清洁的水泥或柏油路面。
任意方向上的坡度不大于2%。
在试验场地上,用明显颜色画出双纽线路径(图1),双纽线轨迹的极坐标方程为:轨迹上任意点的曲率半径R为:当Ψ=0°时,双纽线顶点的曲率半径为最小值,即双纫线的最小曲率半径(m)应按试验汽车的最小转弯半径(m)乘以倍,并圆整到比此乘积大的一个整数来确定。
并据此画出双纽线,在双纽线最宽处、顶点和中点(即结点)的路径两侧共放置16个标桩(图1)。
标桩与试验路径中心线的距离,按汽车的轴距确:定,当试验汽车轴距大于时,为车宽一半加50cm,当试验汽车轴距小于或等于2m时,为车宽一半加30cm。
图1 双纽线路径示意图2.试验方法2.1接通仪器电源,使之预热到正常工作温度。
2.2汽车以低速直线滑行,驾驶员松开方向盘,停车后,记录方向盘中间位置及方向盘力矩零线。
2.3驾驶员操纵方向盘使汽车沿双纽线路径行驶。
车速为10土1km/h。
待车速稳定后,开始记录方向盘转角及力矩,并记录(或显示)车速作为监督参数,直到汽车绕双纽线行驶满三周。
第七章 汽车操纵稳定性试验
2. 定转弯半径法
(1)侧向加速度ay的确定。 (2)根据记录的转向盘转角θ及侧向加速度ay ,求出 θ—ay曲线。在数据处理时,为了计算及阅读方便, 各变量不严格按坐标系规定,左转右转均取为正。最 大总质量和轻载两种状态可绘于同一图上。 (3)根据记录的车箱侧倾角φ及侧向加速度ay求出θ— ay曲线。
50
大于4.0
70
汽车以最低稳定车速行驶,调整转向盘转角,使汽 车能沿圆弧行驶。在进入圆弧路径并达到稳定状态后, 开始记录并保持油门和转向盘位置在3s内不动(允许转 向盘转角在±10°范围内调整),之后停止记录。汽车 通过试验路径时,如撞倒标桩,则试验无效。 增加车速,但侧向加速度增量每次不大于0.5m/s2 (在所测数据急剧变化的区段,增量可更小一些)。重 复上述试验,直至做到侧向加速度达到6.5m/s2或受发动 机功率限制,或汽车出现不稳定状态时的最大侧向加速 度为止。 试验按向左及向右转两个方向进行,可以先左转 (或右转),从低速至高速,然后再进行另—方向试验, 亦可以在某一车速下向左、向右两个方向均进行试验后 再增加车速。
5.以车速v1、v2、v3、„„ v10在标桩间蛇行穿行,同时 记录汽车通过有效标桩区的时间、转向盘转角、汽车横 摆角速度及车身侧倾角。 试验以每一个车速各进行一次,共十次(撞倒标桩的 次数不计在内)。
三、试验数据的处理
1.蛇行车速 汽车蛇行通过有效标桩区间直线距离的平均车速,则 称为蛇行车速。 2.平均转向盘转角 3.平均横摆角速度 4.平均车身侧倾角 5.试验结果的表达 将试验结果整理成表的形式,并绘出如下关系图: (1)汽车横 (3)车身侧倾角与车速的关系图。
3. 空气力学特性对汽车操纵稳定性的影响
行驶中汽车所受的外力,除了地面的作用力外就是 空气的作用力。可分为迎面阻力、升力与侧向推力及由 这些力形成的纵倾力矩、侧倾力矩和横摆力矩,这些力 和力矩通过两种途径影响着汽车的操纵稳定性。 一种是直接途径,即空气的侧向推力与空气的横摆 力矩作用于汽车车身上,使汽车的受力状态发生变化, 而使前后轮的侧向力发生变化,或使汽车侧向加速度及 横摆角速度发生变化;另一种是间接途径,即由各种空 气作用力的作用,使各车轮的负荷发生变化,从而改变 了轮胎的侧偏特性。空气的这些作用力的大小大致与空 气对汽车的相对速度的平方成正比。
汽车操纵稳定性1
汽车操纵稳定性实验报告姓名:班级:指导老师:日期:汽车操纵稳定性实验一、实验目的1、通过本次实验学习并应用Simulink仿真。
2、通过实验加深对汽车操纵稳定性知识的理解,并掌握汽车前轮角阶跃输入下的瞬态响应的基本原理和实验方法。
3、通过实验的建模编程仿真培养运用理论知识解决转向系统中遇到的实际问题的能力。
二、实验方法通过软件MATLAB的控制系统仿真Simulink模块进行仿真。
三、实验过程1、建立模型2、编写程序程序如下:m=2480;a=1.33;b=1.48;k1=-25000;k2=-35000;Iz=2600;u=20;K=m*(a/k2-b/k1)/(a+b)^2;l=((a+b)*4/u^2+(a+b)*K*4)*180/pi;mm=m*u*Iz;h=-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2));c=m*u*(a*k1-b*k2)+(a+b)^2*k1*k2/u;b1=-m*u*a*k1;b0=(a+b)*k1*k2;Wo=sqrt(c/mm);j=h/(2*Wo*mm);B1=b1/mm;B0=b0/mm;new_system('ex01');open_system('ex01');add_block('built-in/Step','ex01/Step','position',[20,90,5 0,130]);add_block('built-in/TransferFcn','ex01/Fcn1','position',[70,90,100,130]);add_block('built-in/Scope','ex01/Scope','position',[140,9 0,200,130]);add_line('ex01','Step/1','Fcn1/1');add_line('ex01','Fcn1/1','Scope/1');set_param('ex01','stoptime','6');set_param('ex01/Step','time','0','before','0','after','5. 898');set_param('ex01/Fcn1','Numerator','19.066','Denominator', '[1,3.534,9.8131]');[t,x,y]=sim('ex01',[0,6]);plot(t,x(:,2));四、实验结果1、运行结果图:2、Simulink仿真模块:。
汽车操纵稳定性稳态回转试验
3、Crossbow VG700AB 垂直陀螺仪
在操作稳定性试验中,陀螺仪是进行参数测量的核心仪器 之一。陀螺仪是利用高速回转体的动量矩敏感壳体相对惯性空 间绕正交于自转轴的一个或二个轴的角运动检查装置。利用其 他原理制成的角运动检测装置起同样功能的也称陀螺仪。 目前有一类专门用于车辆动态测量惯性测量单元,其代表铲平 有crossbow VG700AB垂直陀螺仪等,该装置集成了第三代高性 能光钎陀螺和最新的MEMS技术,可以测量三个方向的角度、角 速度和加速度。
Crossbow VG700AB 垂直陀螺仪
1、LC-7700 车速仪
LC-7700是利用GPS原理的车速仪,能高精度测量车辆速度 和行驶距离。100Hz的实时测量,适合从低速试验到加减速试 验的广范围试验类型。并且带有速度的模拟电压信号输出和 距离的脉冲信号输出,能和各种仪器连接。小型轻量的设计 便于在车辆上的放置。测量车速及时间,GPS车速仪不受路面 状况的影响,高速刷新,具有脉冲输出延迟,结构紧凑,方 便在汽车中的放置,外部显示器和遥控器,具有校正的跟踪 体系,在操纵稳定性试验中经常使用。
2、转向盘参数测试仪
测量转向盘的力矩、转角和力。转向盘参数测试仪通常称 为测力方向盘,测试时套装在汽车的转向盘上,不影响对原车 辆转向盘的操作。本仪器可以测量方向盘的自由转角、原地转 向力、方向盘转矩/操纵力、转角和其他静态、动态参数,并具 有RS232接口,可与计算机和其他检测设备一起构成灵活的智能 化检测系统。 仪器整机电路设计采用微处理器作为测试数据处 理单元,高亮度数码管作为测试数据显示器件,具有测试数据 精确、显示直观、性能稳定等特点;并可选配无线传输模块, 可方便地与其他计算机进行无线数据通讯;仪器外型美观、使 用方便;测试结果既可由显示屏直接显示输出也可通过RS232接 口发往计算机由主控计算机处理输出,整个过程连接灵活,操 作使用方便。
汽车操纵稳定性试验方法
汽车操纵稳定性试验方法
汽车操纵稳定性试验是评价汽车在不同路况和操纵动作下的稳定性表现的重要方法。
其试验方法通常包括以下步骤:
1. 直线行驶稳定性试验:车辆沿着直线道路行驶,测试车辆的稳定性和方向盘的响应能力。
可以通过急刹车、急加速等方式来测试车辆的行驶稳定性。
2. 曲线行驶稳定性试验:车辆在不同曲线路段上进行转向试验,测试车辆的侧倾角、侧向加速度以及转向的稳定性。
3. 紧急转向稳定性试验:车辆在高速行驶中进行急转向试验,测试车辆的操纵响应速度和稳定性。
4. 突变路面稳定性试验:在不同路面条件下,如湿滑路面或不平整路面上进行操纵试验,测试车辆的抓地力和稳定性。
通过以上试验方法,可以评估汽车在操纵过程中的稳定性表现,为汽车制造商和消费者提供有关汽车操纵性能的重要参考信息。
操纵稳定性(DOC)
侧倾角测试标准试验评价:操稳试验评价1.目的2.试验准备3.测量仪器4.测试阶段5.评估6.分析7.操控性8.驾驶性9.评估表1.目的在主观评估中,驾驶员不仅是车辆系统中的控制单元,也同时作为测量仪器对车辆性能特性进行主观感受及评估。
该方法不仅将驾驶特性测试及具体驾驶性能测试结合,而且将驾驶特性与驾驶安全性联系在一起。
然而因为该方法不是基于客观测量,其再现性和准确性存在局限。
2. 评估前工作2.1 准备定义评估主题2.2 试验条件根据测试跑道,路面情况和车辆载荷2.3 测试时期和评估的持续时间2.4 明确评估区间(例如其他车辆作为对比对象,竞争对手的车型等)2.5 必要的话,试验驾驶员可以澄清车辆问题3.测量设备3.1 标定速度表精确度:± 1 km/h。
3.2 测量表4.测试阶段测试阶段随计划而定。
5.评估5.1 根据评级系统进行评估5.1.1 根据评估方法,也可以应用隐蔽评级,例如:如果可能的话,无偏差评级。
5.1.2 通过两人进行评估。
6.分析6.1 平均值=试验结果6.2 通过使用足够数量的评估结果确定不规则值7.操控性描述7.1 总体安全性感受测试车辆的整体性依据驾驶安全性进行评估。
可操作性,合理布置及控制组件的功能性也同样需要评估(驾驶员的工作区)。
7.1.1 评估评估等级包括所有单独标准,例如起动性能,直线驾驶,回转性能,转向性能和制动性能。
被评估且结果过度高于或低于标准的个体标准不应被忽视或过于重视,取决于加重,例如频数及密度-考虑到安全性时评估总体安全性感受时。
7.1.2 车辆状况为达到真实的评估结果,以下参数应在评估项目进行前进行检查:规定轮胎气压,公差界限内的几何数值。
发布的底盘设备。
7.1.3 注释原则上操控性测试应在接近其他车辆的试验场跑道。
7.2 启动性能起动性能评估应包含以下方面的内容:起动下坐,车轮跳动,起动振动,牵引力,方向稳定性和方向盘反馈。
7.2.1 评估评估结果=起动标准的平均值7.2.2 行使条件正常起步和节气门全开-从静止开始加速,不同载荷情况,正向/逆向驾驶,干燥/潮湿/光滑路面。
第四章操纵稳定性试验
第四章 操纵稳定性试验第一节 概 述一、试验的基本原理汽车的操纵稳定性,指的是汽车在高速行驶下,接受驾驶员的控制能力及行驶方向稳定性。
进行汽车操纵稳定性研究时,是把汽车看作一个动力学系统(由质量、弹簧、阻尼二者构成),以便进行理论分析和试验研究。
其研究内容通常又称之为汽车横向动力学。
对汽车进行操纵稳定性研究,首先是研究转向输入下汽车的运动特性。
此时,是把汽车看成为一个多自由度动力系统。
在数学模型中,转向系根据研究的需要,又可看成单一自由度系统和二自由度(以上)系统两种情况。
研究转向盘位移输入下汽车的运动特性时,转向系通常看成为单一自由度,此时的转向输入又称之为固定控制输入。
属于这一类输入的试验方法有转向盘转角阶跃、脉冲、正弦输入等项目的试验。
研究转向盘力输入下汽车的运动特性时,转向系应看成至少二自由度,此时转向盘的位移是输出量,所以这种输入又叫做自由控制输入。
为这类研究设计的试验项目有转向盘力脉冲、转向盘回正能力试验等。
上述转向输入都是给定—个特定的与驾驶员操作特性无关的输入,然后观察汽车的输出(运动特性,或称力的响应)。
通过类似的数学模型,还可以进行其他外界环境影响的输入,例如横向风、路面凸起等方面的影响。
这一类分析和试验,又称为汽车开路系统研究(如图4-1-1a )所示)。
数十年来,世界各国这方面的研究工作者做了大量工作、到现在无论是数学模型的建立或是试验方法和设备的研制,均已取得了巨大的成果,或者说已经非常成熟。
特别是有一些试验方法已由国际标准化组织(ISO )作为正式标准颁布执行,例如ISO4138《稳态回转试验》ISO7410《横向瞬态响应试验》等。
a )b )图4-1-1 驾驶员—汽车控制系统a )开路系统;b )闭路系统由于人—机工程研究的发展,20世纪60年代后期,汽车方面的科研工作者就提出了“驾驶员—汽车—外界环境”的闭路系统研究课题,这无论从理论上还是试验方法上,比起开路系统研究来说,难度上都有很大的增加。
汽车操纵稳定性实验之稳态回转实验
汽车操纵稳定性实验之稳态回转实验实验目的:测定汽车对转向盘转角输入达到稳定行驶状态时汽车的稳态横摆响应 学会用前、后侧偏角绝对值之差12()αα-以及转向半径的比0R R 来判别汽车的稳态响应实验仪器:垂直陀螺仪(VG400CD-100)实验车 汽车速度采集器实验条件:1. 实验汽车1.1 实验车是按厂方规定装备齐全的汽车,实验前,应测定车轮定位参数,对转向系、悬架系进行检查,并按规定进行调整、紧固和润滑。
1.2 实验时若用新轮胎,轮胎至少应经过200km 正常行驶磨合;若是旧胎,实验结束时,残留花纹高度应小于1.5mm 。
实验过程中,轮胎充气压力应符合该车技术条件规定,误差不得超过±10kPa 。
2.实验场地2。
1 实验场地应为干燥、平坦且清洁的水泥或沥青路面,任意方向的坡度不大于2%2。
2 实验时风速应不大于5m s2。
3 大气温度在040-℃之间实验方法:1. 在实验场地上,画出半径为15m 的圆周1.2. 接通仪器连线并开机预热至工作温度2。
3. 实验开始前,汽车以侧向加速度为23m s 的相应车速沿画定的圆周行驶500m 以使轮胎升温。
4. 驾驶员操纵汽车以最低稳定车速沿所画圆周行驶,此时转向盘得转角为sw0δ;测定车速0u 以及横摆角速度0r ω。
由于车速很低,离心力很小,轮胎侧偏角忽略不计。
保持转向盘转角sw0δ不变条件下,令汽车缓慢连续而均匀的加速(纵向加速度不得超过20.25ms ),直至汽车的侧向加速度达到26.5m s (或受发动机功率限制而所能达到的最大侧向加速度、或汽车出现不稳状态)为止.纪录整个过程。
5. 实验按向左转和向右转两个方向进行,每个方向实验三次。
每次实验开始时车身应处于正中位置。
实验数据处理:1. 连续测量车速u 与横摆角速度r ω值,根据瞬时的u 与r ω值,按公式,y r r u R a u ωω==求出相应的R 与y a 值,根据数据画出0y R R a -曲线2. 根据求得半径R 换算出前、后轮侧偏角之差1201157.3L R R αα⎡⎤-=-⎢⎥⎣⎦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车操纵稳定性实验指导书课程编号:课程名称:实验一汽车转向轻便性实验实验目的汽车的转向轻便性和操纵稳定性是现代汽车重要的使用性能,通过对实验了解和掌握测试系统的安装调试、基本实验方法并学会数据处理和运用理论知识对汽车操纵稳定性研究、评价。
以培养学生解决实际工程问题的能力。
二、实验的主要内容了解测试系统的组成和测试原理,汽车转向轻便性实验的数据的实时采集和处理。
测定汽车在低速大转角时的转向轻便性,与操纵稳定性其他试验项目一起,共同评价汽车的操纵稳定性。
采集测量变量及参数方向盘转角;方向盘力矩;方向盘直径。
三、实验设备和工具1.测量仪器汽车方向盘转角——力矩传感器汽车操纵稳定性数据采集和分析仪2.实验车辆小型客车一辆3.标明试验路径的标桩16个。
四、实验原理测定汽车在道路上进行转向行驶时,驾驶员作用在方向盘上的力矩和方向盘转角的变化关系评价汽车的转向操纵性能验方法和步骤1.实验准备试验场地应为干燥、平坦而清洁的水泥或柏油路面。
任意方向上的坡度不大于2%。
在试验场地上,用明显颜色画出双纽线路径(图1),双纽线轨迹的极坐标方程为:为:轨迹上任意点的曲率半径R°时,双纽线顶点的曲率半径为最小值,即=0Ψ当.双纫线的最小曲率半径(m)应按试验汽车的最小转弯半径(m)乘以倍,并圆整到比此乘积大的一个整数来确定。
并据此画出双纽线,在双纽线最宽处、顶点和中点(即结点)的路径两侧共放置16个标桩(图1)。
标桩与试验路径中心线的距离,按汽车的轴距确:定,当试验汽车轴距大于时,为车宽一半加50cm,当试验汽车轴距小于或等于2m时,为车宽一半加30cm。
图1 双纽线路径示意图2.试验方法2.1接通仪器电源,使之预热到正常工作温度。
2.2汽车以低速直线滑行,驾驶员松开方向盘,停车后,记录方向盘中间位置及方向盘力矩零线。
2.3驾驶员操纵方向盘使汽车沿双纽线路径行驶。
车速为10土1km/h。
待车速稳定后,开始记录方向盘转角及力矩,并记录(或显示)车速作为监督参数,直到汽车绕双纽线行驶满三周。
3.数据处理3.1根据记录的方向盘转角及方向盘力矩,按双纽线路径每一周整理成图2所示的M—θ曲线,并计算以下参数:3.1.1方向盘最大力矩,用下式计算:式中:Mmax——方向盘最大力矩,N·m;3.1.2方向盘最大作用力,用下式计算:式中:D——试验汽车原有方向盘的直径,m;——方向盘最大作用力,FmaxN。
13..方向盘作用功3θ曲线图2 M—实验报告主要内容及要求1;将计算结果填入N方向盘最大作用力方向盘最大作用N方向盘作用功2M 根据测量数据绘制—θ曲线(参见图)实验注意事项若规定气压大±试验时,轮胎气压必须符合规定。
若规定气压小于245kPa时,允许偏差为%。
±2245kPa于时,允许偏差为在记录时间内,保持车速稳定及不准撞倒标桩。
实验二稳态回转响应实验实验目的测定汽车在方向盘一个转角输入时,汽车运动的稳态响应过程。
与操纵稳定性其他试验项目共同评价汽车的操纵稳定性。
实验的主要内容了解测试系统的组成和测试原理,汽车稳态回转响应实验的数据的实时采集和处理。
采集测量变量及参数汽车側向加速度;汽车横摆角速度;实验设备和工具.测量仪器1.电子陀罗仪汽车操纵稳定性数据采集和分析仪2.实验车辆小型客车一辆实验原理采用固定方向盘转角,连续加速的方法进行回转行驶实验,测定实验过程中侧向加速度与汽车绕自身Z轴的转动角速度,并计算汽车圆周行驶中的瞬态转弯半径,评价汽车的转向特性。
实验方法和步骤在试验场地上,用明显颜色画出半径为15m的圆周。
1.接通仪器电源,使之预热到正常工作温度。
2.试验开始之前,驾驶员操纵汽车以最低稳定速度滑所画圆周行驶,待汽车后部中点能对准地面所画圆周时,固定方向盘不动,停车并开始记录,记下各变量的零点。
2),直至汽车的侧向加速度达s3.汽车起步,缓缓连续而均匀地加速(纵向加速度不能超过/2(或受发动机功率限制而所能达到的最大侧向加速度、或汽车出现不4m/s到稳定状态)为止、记录整个过程。
4.试验按向左转和向右转两个方向进行,每个方向试验三次。
实验报告主要内容及要求试验数据处理及结果表达1.转弯半径比R;/R。
与侧向加速度a关系曲线根据记录的横摆角速度及汽车侧向加速度,用下式计算各点的转弯半径;2ii / γRi = ааi2;s i点的侧向加速度,m式中:/——第γi——弟i点的横摆角速度,弧度/s ;Ri——第i点转弯半径,m;进而算出各点的转弯半径比Ri/R。
(R。
为初始半径,m)填入表1中。
根据计算结果,在图1绘出R/R。
一a曲线。
根据R/R。
一a曲线判定汽车的转向特性。
表1图1 转向特性曲线实验注意事项试验汽车所用轮胎和轮辋型式及尺寸,必须符合规定。
如试验时使用新轮胎,试验前轮胎至少应经过200km正常行驶的磨合。
如试验时使用旧轮胎,试验终了时,残留花纹的高度应不小于。
试验时轮胎气压必须符合厂方规定。
若规定气压小于245kPa时,允许偏差为±4.5kPa;若规定气压大于245kPa时,允许偏差为±2%。
试验场地应为干燥,平坦而清洁的水泥或柏油路面,任意方向上的坡度不大于2%。
试验时风速不大于3m/s。
实验三转向回正性能实验实验目的通过实际测量汽车从圆周运动状态自动回到直线行驶状态时,汽车的各项相关参数分析和评价汽车从曲线行驶自行回复到直线行驶的能力。
实验的主要内容通过实际道路运行实验,采集实验参数并用专用信号处理仪或专用软件在通用电子计算机上计算和处理实验数据,对汽车的回正性能作出客观评价。
实验设备和工具1.测量仪器汽车方向盘转角——力矩传感器汽车操纵稳定性数据采集和分析仪2.实验车辆小型客车一辆实验原理.本项实验是汽车方向盘力输人的一个基本实验,当汽车作圆周运动时,由于转向轮有主销内倾角的作用,汽车应有从曲线行驶自行回复到直线行驶的过渡能力,其性能的优劣与转向系统的设计有密切的关系。
通过汽车回正的过度过程分析操纵稳定性其他试验项目一起,共同评价汽车操纵稳定性。
实验方法和步骤试验方法1.在试验场地上用明显的颜色画出半径为15m的圆周。
2.接通仪器电源,使仪器达到正常工作温度。
2之后的側向加速度后,4m/s调整车速使侧向加速度达到3.驾驶汽车沿半径为15m的圆周行驶,稳定住车速并开始记录,待稳定3s后,驾驶员突然放开方向盘,记录松手后3S的汽车运动过程。
4.在由试验得到的方向盘转角时间历程曲线上(如图1所示),以松开方向盘的时刻定为时间坐标(横坐标)的原点。
计算如下评价指标:4.1稳定时间(回正时间)及残留横摆角速度;4.2横摆角速度超调量;4.3自然频率f4.4相对阻尼系数实验报告主要内容及要求1.评价指标的计算1.1稳定时间(回正时间)及残留横摆角速度从时间坐标原点开始,到汽车横摆角速度达到某一数值(包括零值)并保持不变止,这一段时间定为稳定时间(回正时间),到达稳定时刻的横摆角速度则称为残留横摆角速度。
稳定时间(回正时间)用下式计算:式中:t——稳定时间(回正时间),s;t,t,t——分别为第1、2、3次试验的稳定时间(回正时间),S。
312残留横摆角速度由下式计算:式中:Δr残留横摆角速度,°/s;Δr、Δr、Δr——分别为第1、2、3次试验的残留横摆角速度,°/s。
3211.2横摆角速度超调量横摆角速度超调量是横摆角速度响应第一个峰值超过稳态值的部分与稳态值之比,(见)用下式计算:A1图式中:——横摆角速度超调量,%;;——横摆角速度响应的第一个峰值超过稳态值的部分,°/s r l。
——横摆角速度响应的稳态值,°/sr0横摆角速度自然频率由下式计算:.31;H j 0——横摆角速度响应自然频率,式中:Z A1);Ai——横摆角速度响应曲线的波峰(见图s;Δti——横摆角速度响应曲线两相邻波峰的时间,——横摆角速度响应曲线的波峰个数。
n横摆角速度时间历程图A1后,再求得相对阻尼系数。
相对阻尼系数可先求得衰减率D41.——衰减率:式中:D)。
——第一个波峰值(见图A1Aiζ——相对阻尼系数。
式中:.将实验结果填入表12参数左转右转稳定时间S;°/残留横摆角速度s横摆角速度超调量%横摆角速度自然频率H Z.相对阻尼系数实验注意事项.仪器量程及精度应符合需要。
12.包括传感器及记录仪器在内的整个测量系统频带宽度为0~3 H。
Z3.必须测量的变量:汽车前进速度;方向盘转角;汽车横摆角速度。
4.试验条件a. 试验汽车应是装备齐全的汽车。
试验前对前轮定位参数、转向系、悬架系进行检查。
并按规定紧固和润滑。
b.试验场地应为干燥、平坦而清洁的水泥或柏油路面。
任意方向上测量的坡度不大于2%。
c. 风速不大于3m/s。
d. 试验车速为60km/h。
实验四汽车转向瞬态响应实验实验目的了解和掌握汽车转向瞬态响应实验的基本原理和实验方法,通过实验数据的处理和计算培养运用理论知识解决汽车转向系统设计过程遇到的实际工程问题能力。
实验的主要内容测定从方向盘转角脉冲输人开始,到所测变量达到新稳态值为止,这一段时间内汽车的瞬态响应过程,用数据处理专用软件在通用计算机上进行实验数据分析与计算。
实验设备和工具测量仪器1.汽车方向盘转角——力矩传感器2.汽车操纵稳定性数据采集和分析仪实验原理在汽车直线行驶时,通过对方向盘输入转角脉冲以模拟汽车在受到外力时自动维持直线行驶的能力。
测定从方向盘开始,到所测变量达到新稳态值为止,这一段时间内汽车的瞬态响应过程,评价汽车的动态特性。
实验方法和步骤1.试验前以试验车速行驶10km,使轮胎升温。
2.接通仪器电源,使之预热到正常工作温度。
3.汽车以试验车速直线行驶,使其横摆角速度为零,作一标记,记下方向盘中间位置(直线行驶位置)。
然后给方向盘一个三角脉冲转角输人(见图1)。
试验可向左(或向右)转动方向盘,并迅速转回原处保持不动,记录全部过程,直至汽车回复到直线行驶位置。
方向2。
记m/s~盘转角输人脉宽为~秒,其最大转角应使本次试验过渡过程中最大侧向加速度为23录时间内,保持车速不变。
.图1 方向盘转角输入示意4.试验数据处理与结果表达在专门的信号处理设备或用数据处理专用软件在通用计算机上进行幅频特性与相频特性的分析可以。
实验报告主要内容及要求结果表达1.根据试验数据处理结果的平均值,向左与向右转分别绘制出汽车的幅频相频特性图,如图2所示(图2横坐标为对数坐标,亦可采用线性坐标),横坐标值应为0~ 3 HZ。
2.计算结果填人表1。
-1θγ/ sα(°)图2 幅频相频特性表1 实验数据实验注意事项1.仪器量程及精度应符合需要。
3 HZ.包括传感器及记录仪器在内的整个测量系统频带宽度不小于2 。