工业控制调节器
PID自整定调节器及在自动调节中的应用

( 习水电厂 , 州 习水 贵 5 40 ) 6 60
摘
要 :I PD控制是过程控制 中应用最广泛的控制方 法。文中简述 了 F X O O公 司的 IA’ e e IE 自整定调 O BR / Sr sPD i
节 器的参数整定方式以及该调 节器在 汽包水位调 节控 制 系统中的应 用。
调节 器减 小微 分 因子 D C 。 F T
1 2 PD . I E自整定
要求调节器具有 良好的变参数 自适应能力。 在汽包水位 自动调节中, 机组负荷较低时, 一般 采用单冲量水位控制。此时 , 除了维持汽包水位在 规定 的范围, 同时根据负荷变化维持给水泵 的母管 压力在所需的压力值上 。当机组带负荷上升 , 脱离 低负 荷后 , 控制 系 统根 据 逻 辑设 定 自动 地无 扰 切 换 到三冲量控制。无论在单冲量控制阶段还是三冲量
荡周期的 8 。 等。这些参数值将被在调节器 的 倍 ) 自整定算法中引用。预整定同时评估 N ( B 噪声带 )
74 ・
第 6期
饶明胜 :I 自整 定调节器及 在 自动调节 中的应用 PD
参数 。噪声带是测 量值信号 中含 有 的固有 噪声信 号, 并用 N B参数判 断观测到的峰值是否真实 , 以排 除噪声造成的假象 , 防止系统 出错。若 N B值过高 ,
超调 量 : O R= 一E/ 1 V 2E
及软件 , F X O O公 司的 IA Sr s 能 自动 如 OBR / ’ee智 i 化DS C 系统就 提供 了几种具有 自整定功能 的 PD I 调节 器模 块 , PD PD E等 。 如 IE,IX
1 PD IE调节器模块 的参数整定功能
部设置或通过其它模块组态逻辑切换到期望的工作 状态 。 PD IE控制模块 在初始化 时进入 M N工作 状 T 态。在 PD I E模块最初投人运行时 , 可根 据运行经
欣灵电气 XMT -7000D工业调节器 温度控制器 说明书
XMT -7000D工业调节器/温度控制器产品使用说明书欣灵电气股份有限公司2)、仪表面板各种功能的显示和参数的设置均正常,指示灯有相应的动作而仪表却失去控制作用时,一般是因仪表外部负载短路、断路、错线等导致了仪表内器件的烧坏。
此时请打开仪表,凡触点输出的,请检查连线是否焦痕;凡驱动可控硅的请检查脉冲变压器或光电偶合器是否有开路现象。
如有上述情况,修复铜箔或把仪表寄回生产厂家维修。
压是否太低,并使之符合技术要求规定。
10、仪表的保存仪表应在包装齐全的情况下存放在干燥通风、无腐蚀性气体的场合。
XMT -7000D工业调节器/温度控制器 使用说明书此产品在使用前,请仔细阅读说明书,以便正确使用,并请妥善保存,以便随时参考116欣灵电气股份有限公司X I N L I N G E L E C T R I C A L C O., L T D地址:浙江省乐清柳市智广工业区邮编:325604电话:*************传真:*************E-mail:************** XMT-7000D系列智能数字温度控制仪是在XMT-8000系列基础上,更新开发的高性能智能仪表,它以优异的控制精度,迅捷的扰动响应和强大的抗干扰能力,满足用户的各种控温需求。
可广泛应用于机械、化工、陶瓷、轻工、冶金、石化、热处理等行业的温度、流量、压力、液位等的自动控制系统。
1、产品简介产品主要特点:软件调零调满度,冷端自动补偿室温。
四位双色LED数码管分别指示测量和设定值。
仪表深度小于82mm,机框短小,便于安装。
2、仪表主要技术参数:主要项目 技术参数 说明显示基本误差 ≤±(1.0%F S+1个字)或±(0.5%F S+1个字)冷端补偿误差 ≤±2℃温度系数 ≤0.05/℃仪表分辨率 1℃或0.1℃仪表采样周期 3次/秒输出触点容量 继电器触点220V阻性负载≤3A继电器触点220V感性负载≤1A输出控制电压 S S R驱动电平D C0-12V输出控制电流 0-10m A电流负载阻值800欧姆以下4-20m A电流负载阻值600欧姆以下工作环境 环境温度0-50℃,相对湿度:45%-85%大气压力:80-106K P a信号输入 热电偶:E、K、J、B、S热电阻:C U50、P T100输出和报警方式 多种(见型谱表)9、故障的显示和判断9.1 仪表的故障显示1)、若怀疑仪表的精度,可把传感器插入经充分拌和的冰水混合液中,仪表应显示在0℃左右,把传感器插入在标准在大气压下的沸水中,仪表应显示100℃左右,误差较大时一般是传感器分度号与仪表不配所致。
THKA多回路智能工业调节器

2
尺寸布局
CH01
CH02
A1
A1
A2
A2
OUT
OUT
CH03
CH04
A1
A1
A2
A2
OUT
OUT
CH05
CH06
A1
A1
A2
A2
OUT
OUT
CH SET
EXIT
THKA多路智能工业调节器
测量值显示或参数代号 测量值显示或内部参数值
上限报警指示灯 下限报警指示灯 主控输出指示灯 温度控制设定键 内部叁数设定键 移位键 减数键 加数键 退出并保存设置
输入信号
热电偶: K、S、E、J、T、B、N、R、WRe3-25、WRe5-26、F2(辐射传感器) 热电阻: PT100、CU50、CU100 电 流: 0~20mA、4~20mA 电 压: 0~5V、1~5V、0~10V 毫 伏: 0-100mV、0-75mV、0-50mV、0-60mV 电 阻: 0-400欧(用于远传压力表)
96(W)
95mm
92(W)
面板尺寸
开孔尺寸
96(H) 96(H) 92(H)
3
背面输入部份共有2组可插拔的端子,每组为3个输入通道,最大为6路信号输入,可 连 接 热 电 偶,热 电 阻, 4 ~ 2 0 m A , 0 ~ 5 V, 0 ~ 1 0 V , 1 ~ 5 V, 0 ~ 7 5 m V, 0 ~ 1 0 0 m V等 多 种 传感器,实现温度,压力,湿度的信号采集。
CH03
CH04
A1
A1
A2
A2
OUT
OUT
两路温控面板
PV CH01
PV CH02
仪表型号定义(精)
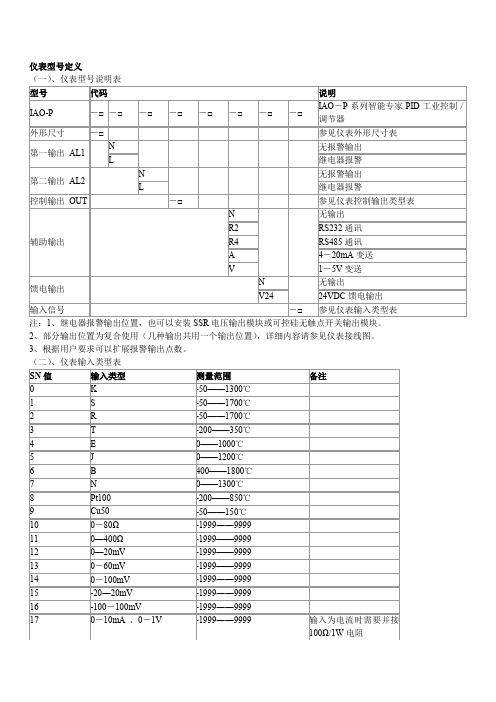
(一)、仪表型号说明表
型号
代码
说明
IAO-P
-□
-□
-□
-□
-□
-□
-□
-□
IAO-P系列智能专家PID工业控制/调节器
外形尺寸
-□
参见仪表外形尺寸表
第一输出AL1
N
无报警输出
L
继电器报警
第二输出AL2
N
无报警输出
L
继电器报警
控制输出OUT
-□
参见仪表控制输出类型表
辅助输出
N
无输出
R2
RS232通讯
-1999――9999
11
0—400Ω
-1999——9999
12
0—20mV
-1999——9999
13
0-60mV
-1999——9999
14
0-100mV
-1999――9999
15
-20―20mV
-1999――9999
16
-100-100mV
-1999――9999
17
0-10mA、0-1V
-1999――9999
(二)、仪表输入类型表
SN值
输入类型
测量范围
备注
0
K
-50——1300℃
1
S
-50——1700℃
2
R
-50——1700℃
3
T
-200——350℃
4
E
0——1000℃
5
J
0——1200℃
6
B
400——1800℃
7
N
0——1300℃
8
Pt100
AI 人工智能工业调节器 说明书

AI人工智能工业调节器(适合温度、压力、流量、液位、湿度……的精确控制)使用说明书 (V6.0)一、概叙 (3)(一)主要特点 (3)(二)型号定义 (4)(三)不同型号仪表的功能区别 (7)(四)模块功能的进一步说明 (8)(五)仪表维护 (10)二、技术规格 (11)三、仪表接线 (13)四、面板说明及操作说明 (18)(一)显示状态 (19)(二)基本使用操作 (21)(三)AI人工智能调节及自整定(AT)操作 (22)(四)程序操作(仅适用AI-808P型) (24)五、功能及设置 (25)(一)参数功能说明 (25)(二)部分功能的补充说明 (41)六、AI系列仪表常用工作方式 (47)(一)二位调节仪表(简单的温度控制器) (47)(二)三位调节(上、下限报警)仪表 (48)(三)温度变送器/程序给定发生器 (49)(四)高精度的AI人工智能调节器 (50)(五)手动操作器/伺服放大器 (51)七、AI-808P程序型仪表补充说明 (53)(一)功能及概念 (53)(二)程序编排 (56)八、扩充软件功能(加热/冷却双输出) (60)一、概叙(一)主要特点●人性化设计的操作方法,非常方便易学,并且不同功能档次的仪表操作相互兼容。
●包含国际上同类仪表的几乎所有功能,通用性强,技术成熟可靠。
●提供多个型号,无论是要求功能强大,还是要求价格经济,都能获得满意的选择。
●全球通用的85-264VAC输入范围开关电源或24VDC电源供电,并具备多种外型尺寸供客户选择。
●输入采用数字校正系统,内置常用热电偶和热电阻非线性校正表格,测量精确稳定。
●采用先进的AI人工智能调节算法,无超调,具备自整定(AT)功能。
●采用先进的模块化结构,提供丰富的输出规格,能广泛满足各种应用场合的需要,交货迅速且维护方便。
●通过ISO9002质量认证,品质可靠。
具备符合要求的抗干扰性能。
注意事项●本说明书介绍的是V6.0的AI系列人工智能工业调节器/温度控制器,本说明书介绍的功能有部分可能不适合其他版本仪表。
pi调节器时域表达式可写成

pi调节器时域表达式可写成
(最新版)
目录
1.PI 调节器的基本概念
2.PI 调节器的时域表达式
3.PI 调节器的应用和优势
正文
一、PI 调节器的基本概念
PI 调节器,全称为比例 - 积分调节器,是一种广泛应用于工业控制系统的闭环调节器。
它主要由比例控制器和积分控制器两部分组成,通过对系统误差的实时调节,使被控对象的输出信号与期望信号保持一致。
比例控制器和积分控制器分别对误差信号进行比例放大和积分处理,以达到更快、更稳定的控制效果。
二、PI 调节器的时域表达式
在时域分析中,PI 调节器的传递函数可表示为:
G(s) = K_p / (sT_i)
其中,G(s) 表示 PI 调节器的传递函数,K_p 表示比例增益,T_i 表示积分时间常数,s 表示复变量,K_p / (sT_i) 表示比例控制器与积分控制器的叠加。
三、PI 调节器的应用和优势
PI 调节器在工业控制系统中具有广泛的应用,例如温度控制系统、速度控制系统等。
相较于单一比例控制器或积分控制器,PI 调节器具有以下优势:
1.提高控制系统的稳定性:PI 调节器通过对误差信号的比例放大和
积分处理,能有效减小系统误差,提高控制系统的稳定性。
2.改善控制系统的动态性能:PI 调节器能够加速系统的响应速度,缩短调节时间,从而改善控制系统的动态性能。
3.适用于多种控制对象:PI 调节器具有较强的鲁棒性,适用于多种控制对象,如线性时变系统、非线性系统等。
综上所述,PI 调节器作为一种重要的闭环调节器,在工业控制系统中具有广泛的应用和优势。
工业自动化仪表及过程控制(数字调节器)

工业自动化仪表及过程控制(5-2)Industrial AutomationInstrumentations and Process Control数字控制算法数字调节器:数字式控制仪表。
数字调节的优点:•运算、控制功能丰富;•具有数字通信功能;•可靠性好,使用维护方便数字调节器主要输入输出量输出值:VM(MV: Manipulated Variable)设定值:VS(SV: Setpoint variable)测量值:VP(PV:Process Variable)e=VS -VP若:x(t)=e,y (t)=VMy (t)=f(x(t))数字系统的离散信号x0,x1,x2….,x ny0,y1,y2….,y n也记做:x(0),x(1),x(2),…,x(n)y(0),y(1),y(2),…,y(n)数字PID 算法(Digital PID Algorithm)⎰dtt e )(∑∆T k e )(dt t de )(Tn e n e ∆--)1()(基本PID 离散表达式)1(101∑=-∆-+∆+=ni n n d i i n n T x x T T x T x P y 位置式PID 算法位置式数字PID算法的原理增量式数字PID 算法)}2()({12111----+-∆+-+∆=-=∆n n n d n n n i n n n x x x TT x x x T T P y y y •节省内存空间和运算时间•减少累计误差•误差动作影响小增量式PID 算法原理)1(1)1(110211101∑∑-=----=-∆-+∆+=∆-+∆+=n i n n d i i n n n i n n d i in n T x x T T x T x P y T x x T T x T x P y )}2()({12111----+-∆+-+∆=-=∆n n n d n n n i n n n x x x TT x x x T T P y y y算法框图开始输入r(n),y(n)计算e(n)计算p(n)e(n)=e(n-1)位置式PID算法框图返回PID程序获得方法三种常用PID程序编程语言性能对照功能开发时间通用性价格针对性调试汇编语言一般长差低强难高级语言强中中中强中组态软件很强短好高一般易不完全微分的PID 算法由于理想的微分动作对高频干扰过于敏感,不能使用,为抑制干扰的影响,数字调节器仿效模拟调节器,将理想的微分改为不完全微分,也称为有限制的微分)111(1)(dd d i K sT s T s T P s G +++=不完全微分的PID算法易引起振荡和超调冲击小,系统稳定不完全微分PID 结构框图)111(1)(dd d i K sT s T s T P s G +++=采样周期(Sample Time)Ts的选择•采样定理•系统动态指标•对象动态特性•干扰信号的频谱•控制回路数•计算精度常见被调量的经验采样周期数字PID 控制的改进算法充分应用计算机控制软件算法实现方便的优点,在基本PID的基础上,对其算法进行各种改进,使其达到更好的控制效果。
PID调节器的作用及其参数对系统调节质量的影响
PID调节器的作用及其参数对系统调节质量的影响PID调节器(Proportional-Integral-Derivative Controller)是一种常见的工业控制器,广泛应用于各种自动控制系统中。
它可以根据给定的设定值与实际测量值之间的误差来调节系统的输出,并使系统的响应更加稳定和准确。
1.稳定性控制:PID控制器能够保持系统在给定设定值附近稳定工作,其比例(P)作用能够根据实际误差大小来调整输出力度,积分(I)作用能够补偿系统的稳态误差,而微分(D)作用则能够抑制系统的过度振荡。
2.响应速度控制:通过调节PID控制器的参数,可以控制系统的响应速度。
比例(P)作用对响应速度的影响最大,增大比例增益可以提高响应速度,但也容易引起系统的过度振荡;积分(I)作用对响应速度的影响较小,主要用于补偿静差;微分(D)作用能够减小系统的过度振荡和快速变化。
3.抗干扰能力:PID控制器通过比例(P)作用能够快速响应系统的测量误差,通过积分(I)作用能够积累误差并持续调整输出,通过微分(D)作用能够预测未来的变化趋势,因此具有较强的抗干扰能力。
4.参数调节:PID控制器的参数对系统的调节质量有很大影响。
比例增益(Kp)决定了系统的响应速度和稳定性,增大Kp可以提高响应速度,但会增加系统的过度振荡;积分时间常数(Ti)决定了系统对于静差的补偿能力和稳态误差的消除速度,较大的Ti能够减小系统的静差,但可能引起系统的超调;微分时间常数(Td)决定了系统对于变化速率的响应速度,较大的Td能够抑制系统的过度振荡。
综上所述,PID调节器的作用及其参数对系统调节质量的影响是多方面的。
通过调节PID控制器的参数,可以控制系统的稳定性、响应速度和抗干扰能力,从而实现对系统的准确控制。
但需要注意的是,不同系统的特性不同,参数的选择需要根据具体情况进行调整,经验和试错是提高调节质量的关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 时间特性 观察输入信号变化时,控制规 律的瞬时响应过程。 • 微分方程与传递函数 控制规律的精确数 学表达。 • 频率特性 观察输入信号在频率发生变化 时,控制规律的响应规律。 • 差分方程 微分方程或传递函数的离散化 算法,用于计算机软件编程。 • (1)比例调节器(P) •
• •
图4.22 直接数字控制系统构成图
• (2)软件构成
图4.23 数字调节器监控程序框图
• 4.4.2 模拟量输入通道 • (1)高精度的多路数据输入通道
图4.24 多路多信号制高精度模拟量输入通道
• (2)同步通道
图4.25 实时性较强的模入通道
图4.26
高抗干扰模入通道原理示意图
• (3)高抗干扰通道 • 4.4.3 模拟量输出通道与手操电路 • (1)一个简单的模出通道
图4.33 专家自整定调节器构成框图
图4.34 设定值变化或负荷扰动下输出响应曲线类型
• 2)控制目标
• 3)整定规则
图4.35 参数整定规则程序框图
• 4)推理机构 • (2)整定过程 • 1)启动处理 • 2)在线自整定 • 3)相关计算 • ①过程响应时间TR计算 • ②估算准确度MR
图4.36 专家自整定PID控制程序流程框图
图4.27 模拟量输出通道设计方案 (a)高精度多通道廉价的模出通道;(b)可靠性高且设计简单的模出通道
• (2)一种带手操的模出通道设计
图4.28 一种带手操电路的模出通道设计
• 1)可逆计数器4516
图 4.29 4516引脚及真值表
图4.30 由卡诺图设计逻辑控制电路
• 2)逻辑控制电路
• 模块代码的特点: • ①组态灵活。 • ②图形化组态与传统的控制系统设计极相似。
• 4.5 PID参数自整定调节器 • 4.5.1 概述 • 4.5.2 继电器振荡PID参数自动整定技术
• 4.5.3 专家智能型自整定PID调节器的设计 方法 • (1)自整定专家系统 • 1)响应曲线
图4.6 PID调节器理想与实际的对数幅频特性
• 4.2.2 控制规律的实现方法 • (1)模拟调节器实现方法
图4.7 一个RC电路实现控制规律示例
• 1)串联式PID调节器
图4.8 串联式PID运算电路
• PID运算电路总的传递函数为:
•
• 它们之间的关系为: • • • • • 2)微分先行调节器
• • • •
4.4.4 可编程序调节器 (1)基本功能 (2)可编程序调节器组态方法 1)组态字方式
图4.31 组态字方式的用户ROM区结构
• • • • •
组态字的特点: ①简单易实现、可靠。 ②运算周期较长。 ③用户组态的灵活性较差。 2)模块代码方式
图4.32 模块代码方式组态
• (3)比例微分调节器(PD)
图4.5 PD调节器的时间特性和对数幅频特性 (a)理想的PD作用阶跃响应;(b)实际的PD作用阶跃响应;(c)PD调节器的对数幅频特性
• PD调节器的微分方PD调节器传递函数:
• (4)比例积分微分调节器(PID)
图4.2 比例调节器特性
(a)阶跃响应特性;(b)对数幅频特性
• (2)比例积分调节器(PI) • PI调节器的微分方程:
• 理想PI调节器传递函数:
• 实际的PI调节器传递函数:
图4.3
比例调节器I/O关系
图4.4 PI调节器的时间特性和对数幅频特性 (a)比例积分作用的阶跃响应;(b)理想与实际PI调节器阶跃响应; (c)PI调节器的对数幅频特性
图4.9
测量值微分先行调节器示意图
图4.10 并联式PID运算电路框图
• 3)并联与串并联混合式调节器
• (2)数字调节器实现方法 • 1)模拟化设计方法 • ①标准微分方程的离散化
图4.11 串并联混合式PID运算电路图
• ②传递函数离散化
• • • •
2)数字化设计方法 4.3 模拟调节器 4.3.1 基型PID调节器 DDZ—Ⅲ调节器的基本性能指标:
• (2)工作原理
图4.12 PID调节器组成框图
• (3)电路分析与设计特点
• 1)输入电路——偏差输入电平移动电路
图4.13 调节器的输入电路
图4.14 PD电路与D作用开关
• 2)PD电路——微分作用的投入与切除是无 扰的
• 3)PI电路——手动操作与切换问题
图4.15 PI电路与手操电路
图4.20 积分饱和问题
• (2)抗积分饱和措施 • 抗积分饱和的措施是应用某种方法自动地 监视着积分环节的输出,当输出达到限幅 值时:
• ①限制电容上的电压Vc。
• ②取消积分作用,转换成比例作用。
• ③使输入信号为零或反向。
• (3)电路举例
图4.21 偏差反馈型积分限幅电路
• 4.4 数字调节器和可编程序调节器 • 4.4.1 概述 • (1)硬件结构
图4.16 保持电路
• 4)输出电路——负载可变的恒流电路
• 5)指示电路——简单实用,温度性能好
图4.17 调节器的输出电路
• (4)DDZ—Ⅲ调节器特性分析 • 1)调节器的传递函数
图4.18 指示电路
• 2)误差分析
图4.19 全刻度指示调节器原理图
• 4.3.2 积分饱和问题 • (1)积分饱和及其带来的危害
第4章 调 节 器
• 4.1 概 述 • 调节器是控制系统中的大脑和指挥中心, 如图4.1所示。在自动控制系统中,由于扰 动的作用,被控量X偏离设定值XR,生偏差 ΔX,即
图4.1 控制系统框图
• 4.2 PID控制规律及实现方法 • 4.2.1 常规PID控制规律
• 常见的控制规律表达方法有: