基于光电码盘传感器的位置检测控制电路设计
通过基于光电编码器的数字电路实现直线位移高精度测量
通过基于光电编码器的数字电路实现直线位移高精度测量的一种方法王锋山东电力建设第二工程公司电仪工程处摘要:本文主要介绍了用光电编码器实现大直线位移高精度测量的一种方法。
主要是通过数字电路实现。
数字电路首先对光电编码器输出信号进行辨向,通过符号及加减控制电路实现对计数器的控制,倍频电路对光电编码器的输出信号进行倍频,起到提高测量的精度和消除信号抖动作用,倍频后的的信号输入计数器计数,并通过LED显示器显示测量结果。
关键词:直线位移,光电编码器,数字电路1、光电编码器在位移测量中的应用原理光电编码器是一种高精度的角位移传感器。
因其具有直接输出数字量、响应快、精度高、抗干扰能力强、分辨率高、输出稳定等特点。
用光电编码器测量直线位移时,需用传动机构将直线位移转换为光电编码器的转动角度。
设当被测物体上升时,光电编码器正转,此时A相超前B相1/4个周期;当被测物体下降时,光电编码器反转,A相落后B相1/4个周期,如图1所示.图1 光电编码器输出波形若被测物体停在某一位置时,位移为零。
以此为基准,被测物体上升时,位移增加;下降时,位移减小。
当位移减少到零而被测物体再继续下降时,位移变为负且数值增加;当被测物体再上升时,位移减小但仍为负.当位移减到零后,,位移变为正.可见位移测量不仅要知道位移的大小,还要知道位移的正负。
因此,利用光电编码器测直线位移时,符号判别及加减运算判别是关键。
在使用光电编码器时,符号的判断和加减运算的判别,既可以通过数字电路来实现,也可以通过当今流行的单片机来实现.这里介绍了通过数字电路实现增量式编码器测位移的方法.2、数字电路的原理数字电路主要包括以下几部分:编码器输出的相位相差900的信号经过细分倍频电路一方面可以提高测量的精度,如果编码器一圈输出N个脉冲,其分辨率3600/N,经过四倍频细分后即可达到3600/4N。
另一方面可起到消除信号抖动的作用。
细分后信号一路形成计数信号接入计数器,另一信号警方向判别控制电路,形成方向和加减信号,接入计数器,计数结果及正负经驱动电路由LED 显示。
一种光电探测器电路的设计
一种光电探测器电路的设计胡红光(中国兵器工业第214研究所,安徽蚌埠233042)【摘要】简介一种以锗雪崩光电二极管(APD)为光电转换器件的探测器电路的工作原理,详细介绍电路各组成部分的设计要求和设计要点。
该电路可用于光学测距和微弱光的探测装置。
【关键词】光电探测器;光电转换;电路;放大;设计概述光电探测器电路用于对光电转换器件输出的微弱电压或电流信号进行放大、处理和整形输出。
对于不同探测用途而采用的光电转换器件不同,与之配合使用的光电探测器电路性能也因此而不同。
通常光电器件的用途主要有两种:一种是用来探测光的存在以及测量光的强弱,称之为辐射探测器,主要考虑的是器件探测微弱光的能力;另一种是用来进行光电转换的,考虑的是器件的光电转换效能。
这里介绍探测器电路与锗雪崩光电二极管(ABD)配合使用。
该探测器用来接收一定波长的光脉冲信号,经电路处理后,形成测量时间间隔的电脉冲信号,主要用于激光测距装置。
在保证被测目标物体距离范围时,要求光电器件有宽的动态响应范围。
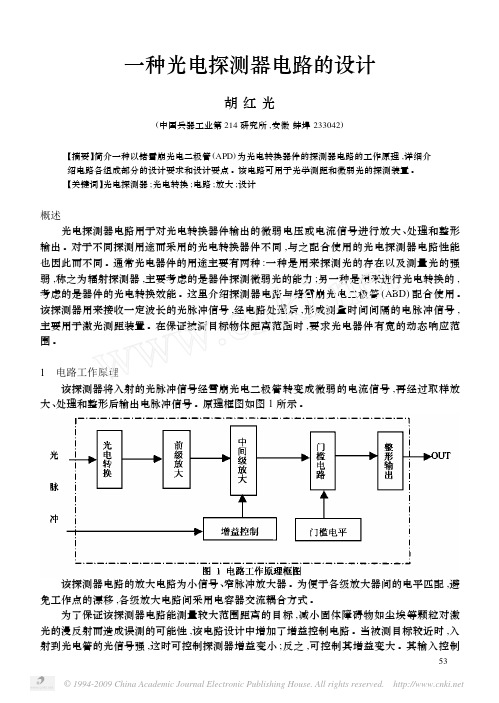
1 电路工作原理该探测器将入射的光脉冲信号经雪崩光电二极管转变成微弱的电流信号,再经过取样放大、处理和整形后输出电脉冲信号。
原理框图如图1所示。
该探测器电路的放大电路为小信号、窄脉冲放大器。
为便于各级放大器间的电平匹配,避免工作点的漂移,各级放大电路间采用电容器交流耦合方式。
为了保证该探测器电路能测量较大范围距离的目标,减小固体障碍物如尘埃等颗粒对激光的漫反射而造成误测的可能性,该电路设计中增加了增益控制电路。
当被测目标较近时,入射到光电管的光信号强,这时可控制探测器增益变小;反之,可控制其增益变大。
其输入控制信号为TCA,该控制信号为电平信号,输入范围为0~Vccl。
由于雪崩光电二极管、晶体管和阻容固有的噪声经过放大后,会对电路的输出造成误动作,因此在放大电路的未端设计了门槛电路,用以将噪声滤掉。
为了避免供电电源尖峰脉冲电流对光电信号检测带来误差,电源输入端采用LC滤波,能有效抑制尖峰脉冲电流的干扰。
利用光电编码器和PLC高速计数器进行定位控制
利⽤光电编码器和PLC⾼速计数器进⾏定位控制利⽤光电编码器和PLC⾼速计数器进⾏定位控制在往返式传动控制系统中,很多时候都会涉及到多点定位问题。
即要求在不同的定位点启动不同的机械动作。
但由于机械惯性的作⽤,常常会给系统带来定点误差。
本系统以龙门刨床的机械传动为例,采⽤plc作为控制器,通过变频器调节速度,利⽤光电编码器和plc⾼速计数器进⾏定位控制,从⽽实现精确定位。
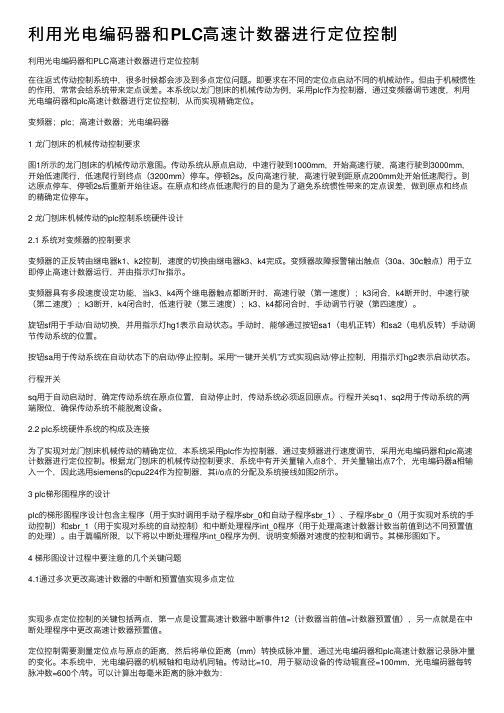
变频器;plc;⾼速计数器;光电编码器1 龙门刨床的机械传动控制要求图1所⽰的龙门刨床的机械传动⽰意图。
传动系统从原点启动,中速⾏驶到1000mm,开始⾼速⾏驶,⾼速⾏驶到3000mm,开始低速爬⾏,低速爬⾏到终点(3200mm)停车。
停顿2s。
反向⾼速⾏驶,⾼速⾏驶到距原点200mm处开始低速爬⾏。
到达原点停车,停顿2s后重新开始往返。
在原点和终点低速爬⾏的⽬的是为了避免系统惯性带来的定点误差,做到原点和终点的精确定位停车。
2 龙门刨床机械传动的plc控制系统硬件设计2.1 系统对变频器的控制要求变频器的正反转由继电器k1、k2控制,速度的切换由继电器k3、k4完成。
变频器故障报警输出触点(30a、30c触点)⽤于⽴即停⽌⾼速计数器运⾏,并由指⽰灯hr指⽰。
变频器具有多段速度设定功能,当k3、k4两个继电器触点都断开时,⾼速⾏驶(第⼀速度);k3闭合,k4断开时,中速⾏驶(第⼆速度);k3断开,k4闭合时,低速⾏驶(第三速度);k3、k4都闭合时,⼿动调节⾏驶(第四速度)。
旋钮sf⽤于⼿动/⾃动切换,并⽤指⽰灯hg1表⽰⾃动状态。
⼿动时,能够通过按钮sa1(电机正转)和sa2(电机反转)⼿动调节传动系统的位置。
按钮sa⽤于传动系统在⾃动状态下的启动/停⽌控制。
采⽤“⼀键开关机”⽅式实现启动/停⽌控制,⽤指⽰灯hg2表⽰启动状态。
⾏程开关sq⽤于⾃动启动时,确定传动系统在原点位置,⾃动停⽌时,传动系统必须返回原点。
⾏程开关sq1、sq2⽤于传动系统的两端限位,确保传动系统不能脱离设备。
光电码盘四倍频分析---程序和电路结构

的增量式光电码盘, 常采用四倍频的方法提高其测量精度。 针对一些精度和稳定性不高的四倍频电路 从原理上说明了电路的精度 在应用中造成的误差5详细分析了两种可应用于不同环境的四倍频电路, 和稳定性5其结论在实际应用中也得到了验证。 关键词" 电机控制 伺服电路 光电码盘
万方数据
自动化与仪器仪表
, () %* #() 6 ) + ## #6 .$ =.. #) ? # &# &! &6 &) &B &+ .%C DE 3# 3! 36 3) 3B 3+ ! B ( #" #! #B # F, ! !
图 ! 面向通用计数器的的四倍频及判向电路
跳变) , 其输出信号不会发生
0, 1 2 3 # 0- 1 2 3 ! 3# 3+
45#
!36 !3+
45#
7・( 8 3# 7・( 8 3#
45#
45#
!36 !36
45#
7!23! 7!23!
45#
!3+ !3+
45#
79 79
45#
45#
45#
45#
45#
45#
45#
1, 1-
3! 36
13# 13+
图 ) 面向计数器的四倍频及判向电路时序图
在分布于各个行业的大量机电系统的设计中, 定 位 精 度 常 常 是 最 关 键 的 性 能 指 标 之 一 。在 此 类 系 统 的 设计中, 当前主要使用电机作为驱动, 因此研究提高 电机伺服系统定位精度的方法, 对提高机电系统性能 具有重要的意义。对于一个设计完善的伺服系统而 言, 其 定 位 精 度 主 要 取 决 于 位 置 测 量 装 置 (#) 。 由 于 光 电码盘具有分辨率高、 响应速度快、 体积小、 重量轻、 输出稳定、 耐恶劣环境等特点, 所以在电机伺服控制 系统中得到了广泛应用。通常, 光电码盘分为绝对式 和 增 量 式 两 种 。绝 对 式 码 盘 在 任 意 位 置 都 可 给 出 与 位 置相对应的数字转角输出量,不存在四倍频的问题。 增量式码盘是根据轴所转过的角度,输出一系列脉 冲, 并通过计数电路, 对脉冲进行累计计数, 得到相对 角 位 移 。由 于 单 个 绝 对 码 盘 的 角 位 移 的 测 量 范 围 仅 为 。其 中 , #) /、 0 两相信号的脉冲数标志码盘轴所转过 的角度, /、 0 之间的相位关系标志码盘的转向,即当 标志码盘正转 ( 见 图 #%) , 当 0 / 相 超 前 0 相 ." * 时 , 相 超 前 / 相 ." * 时 , 码盘反转 (见 图 #’) 。 对于每个确定的码盘, 其脉冲周期 ! 对应的码盘 故其量化误差为 ! 2 !。 如果能够将 / 角位移固定为 !, 或 0 信号四倍频,则计数脉冲的周期将减小到 ! 2 3, 量化误差下降为 ! 2 4, 从而使光电码盘的角位移测量 精 度 提 高 3 倍 。由 于 伺 服 系 统 中 的 码 盘 转 速 具 有 不 可 预见性, 造成脉冲周期 ! 具有不确定的特点, 从而无 法 使 用 锁 相 环 等 常 用 倍 频 方 案 。详 细 观 察 图 # 可 以 发 现, 在脉冲周期 ! 内, /、 0 两相信号共产生了四次变 化 , 即 "#、 "! 时 刻 的 上 升 沿 和 ",、 "3 时 刻 的 下 降 沿 。 尽管 ! 不 确 定 ,但 由 于 /、 0 两方波信号之间相位关 系确定, 使这四次变化在相位上平均分布, 如果利用 这四次变化产生四倍频信号, 则可以实现光电码盘测 量精度的提高。 四倍频后的码盘信号, 需经计数器计数后, 才能 转化为相对位置。计数过程一般有两种实现方法: 一 是由可编程计数器或微处理器内部定时 2 计数器实现 计数;二是由可逆计数器实现对正反向脉冲的计数。 当需控制的电机数量少时,前一方案附加元件少, 结 构简单, 较 为 容 易 实 现 。 如 使 用 4",# 控 制 一 路 电 机 , 则 无 需 添 加 任 何 器 件 , 利 用 其 内 部 的 !" 及 !# 计 数
基于位置敏感探测器的微位移测量关键电路设计
种 设 计 来 可 以 对 入 射 光 斑 位 置 及 其 变 化 进 行 连续 探 测 的 光 电器 件 。为 了 探 测 入 射 光 斑 的 位 置 , 各 种 方 法 可 以 使 用 , 有 包 括 使 用 小 的 分 离 的 探 测 器 阵 列 或 多 单 元 如 C D 这 样 的 C
位 置 敏 感 探 测 器 P D( o io e st e Dee tr【是 一 S P st n S niv tco )】 i i
小 , 了 需 要 对 其 应 用 条 件 ( 照 明光 源 、 景 光 屏 蔽 等 ) 除 如 背 进 行 处 理 , 要 在 其 输 出信 号 的处 理 上 必 须 采 用 高 精 度 、 稳 还 高
JANG a—u ,L n I Xiog o IHo g,YANG Xigl W EN L n ,S i—h i HANG i h ,W A n — n, i o g HIJns u ,Z Ka— i z NG a Yu n
(ntue fFudP yi , A P Mi yn 2 9 0 C ia Istt o li hs s C E , a ag6 10 , hn ) i c n
应 时 间约 几 微 秒 ) 系 统 简 洁 的 特 点 , 位 置探 测 及 相 关领 域 内获 得 了 广 泛 的 应 用 ; P D 的 输 出信 号 小 , 受 到 电 、 在 但 S 易 路 噪 声 的 影 响 , 要 充分 发 挥 其 性 能 , 需要 高精 度 、 若 则 高稳 定度 、 噪 声 的 测 量 电路 。针 对 P D 这 种 较 高的使 用要 求 , 低 s
定 度 、 噪声 的测量 电路 , 则 , 低 否 由于 噪 声 等 的 影 响 , 同样 将
基于单片机的光电编码器位置检测系统设计

基于单片机的光电编码器位置检测系统设计代杰;樊瑜瑾;张学丽;孙宏德【期刊名称】《计算机测量与控制》【年(卷),期】2011(19)1【摘要】In order to real time monitoring of the running state of mechanical equipment, a photoelectric encoder position measuring system based on single-chip is designed. To achive highest counting resolution and faster counting speed, the system use AVR single-chip to accomplish the phase detection and quadruple frequency in the front-end circuit, use the 16-bit counter T2 of MCS - 52 single-chip to count. Meanwhile, the position data is being sent to the upper PC through the serial port of MCS-52 single-chip. Use VB6.0 software to devise the monitoring interface that can dynamically display the position data of encoder. The design is very simple, and has high measuring accuracy, fast speed, which achieve150KHz, and is suitable for the situation of position and angle measurment.%为了实现对机床设备运行状态的实时监测,设计了一种基于单片机的光电编码器位置检测系统;系统采用高性能的AVR单片机对编码器的两相位置信号进行鉴相及四倍频处理,然后通过MCS-52单片机的T2计数器进行硬件计数,同时使用MCS-52单片机的串行端口将位置数据传送至上位PC机中;采用VB6.0软件设计上位机的监控界面,实时动态显示各种编码器的位置数据;试运行结果表明,该设计不仪电路简单,且计数精度高、响应速度快,达到150kHz,适用于各种位置及角度检测场合.【总页数】3页(P17-19)【作者】代杰;樊瑜瑾;张学丽;孙宏德【作者单位】昆明理工大学,机电工程学院,云南,昆明,650093;昆明理工大学,机电工程学院,云南,昆明,650093;云南科技信息职业学院,云南,昆明,650224;昆明昆开专用数控设备有限责任公司,云南,昆明,650106【正文语种】中文【中图分类】TP274【相关文献】1.位置检测装置--光电编码器 [J], 付旭东;付瀛;徐冰2.基于AVR单片机的光电编码器定长系统设计 [J], 陈立兵;樊瑜瑾;代杰;郭波江;孙宏德3.一种光电编码器位置检测系统研究与应用 [J], 李红果4.基于单片机的引俄雷达光电编码器试验检测平台设计 [J], 柳颖5.基于SOC单片机的高集成度光电编码器电路设计 [J], 黎梦泽因版权原因,仅展示原文概要,查看原文内容请购买。
光电编码器作为位置传感器的作用原理
光电编码器作为位置传感器的作用原理光电编码器作为位置传感器的作用1. 介绍光电编码器是一种常用于测量物体位置的传感器。
它通过光电效应来检测光源与接收器之间的光变化,并将这些变化转化为数字信号,从而实现对物体位置的准确测量。
2. 光电编码器的原理光电编码器主要由三部分组成:发光二极管(LED)、光敏二极管(PSD)和编码盘。
其中,发光二极管发射光线照射到编码盘上,光线经过编码盘被反射或透过,最终被光敏二极管接收。
发光二极管发光二极管是光电编码器的光源,它经过电流驱动后会发射出明亮的光线。
在光线照射到编码盘上时,会被不同的编码结构所反射或透射。
编码盘编码盘是光电编码器的核心部件,它被设计成具有特定的编码结构。
常见的编码结构包括光栅、光轮和条纹等。
当光线照射到编码盘上时,根据编码结构的不同,光线可能会被反射或透过。
光敏二极管光敏二极管是光电编码器的接收器,它负责接收光线经过编码盘后的变化。
根据光线的强弱变化,光敏二极管会产生相应的电流信号。
3. 光电编码器的工作原理光电编码器的工作原理是通过检测光线经过编码盘后的变化来确定物体的位置。
具体步骤如下:发光二极管发射光线当光电编码器工作时,发光二极管会发射出光线。
光线照射到编码盘上后,根据编码结构的不同,光线可能被反射或透过。
光线经过编码盘后的变化光线经过编码盘后,编码盘上的结构会对光线产生作用。
对于反射型编码盘,光线会被反射到光敏二极管上;对于透明型编码盘,光线会透射到光敏二极管上。
光敏二极管接收光线并产生信号光敏二极管根据接收到的光线强弱变化,会产生相应的电流信号。
信号的强弱与光线经过编码盘的结构、编码盘的速度以及光线的强弱等因素有关。
将信号转化为位置信息通过测量信号的变化,可以计算出物体相对于光电编码器的位置。
根据不同的编码结构和测量方法,可以实现不同精度的位置测量。
4. 应用领域光电编码器作为位置传感器在许多领域都有广泛的应用。
例如:•机械制造:用于测量机床、机器人和自动化设备等的位置信息,实现精确定位和控制;•电子设备:用于调节电子设备的位置,例如光驱、打印机和扫描仪等;•运动控制:用于测量运动设备的位置,例如直线推进器和步进电机等。
光电编码器作为位置传感器的作用原理(一)
光电编码器作为位置传感器的作用原理(一)光电编码器作为位置传感器的作用1. 介绍光电编码器光电编码器是一种常用的位置传感器,用于测量物体的位置和运动,它通过光学和电子技术实现对位置的准确检测。
光电编码器由光电传感器和信号处理器组成,能够将运动物体的位置信息转化为电信号,供控制系统使用。
2. 光电编码器的原理光电编码器的工作原理基于光电效应和编码原理。
它利用光电传感器接收到的光信号来测量物体的位置。
光电效应光电效应是指光线照射到物质表面时,光的能量转化为电子的能量的现象。
光电传感器中常用的光电效应有光电发射效应和光电导效应。
编码原理光电编码器利用光栅或光轮等编码结构,将运动物体的位移转换为特定的光信号序列。
常见的编码结构有增量式编码器和绝对式编码器。
增量式编码器增量式编码器通过光栅或光轮上的刻线,将一圈的运动分成多个小的步进。
光电传感器检测到光栅或光轮上的刻线变化,就能够获得物体运动的位移和方向信息。
增量式编码器的优点是简单、成本低,而缺点是不能直接获得物体的绝对位置。
绝对式编码器绝对式编码器通过光栅或光轮上的特殊编码结构,能够直接读取物体的绝对位置信息。
光电传感器检测到刻线时,通过特定的编码规则,可以生成唯一的二进制码或灰码,表示物体的位置。
绝对式编码器的优点是可以直接获得物体的绝对位置,具有较高的定位精度。
3. 光电编码器的应用光电编码器广泛应用于机器人、数控机床、自动化系统等领域,用于测量和控制运动物体的位置。
位置测量光电编码器能够精确测量物体的位置和位移,提供给控制系统进行位置反馈和控制。
在机器人领域,光电编码器可以用于测量机械臂的关节角度,实现精确的定位和运动控制。
倾斜检测光电编码器还可以用于检测物体的倾斜角度。
通过安装在物体上的倾斜传感器,结合光电编码器测量的位置信息,可以计算出物体的倾斜角度,并进行相应的控制。
光电编码器能够根据刻线的变化速度来测量物体的运动速度,从而实现对运动物体的速度控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstr act: The design idea and concrete circuit of the board based on PC BUS for position detecting and control are
introduced. Aim at the encoder output's signal A, B and Z pulse, design a specialized electric circuit for the pulse
2007 年 第 29 卷 第 1 期 第 52 页
电气传动自动化 ELECTRIC DRIVE AUTOMATION
Vol.29, No.1 2007, 29( 1) : 52~56
文章编号: 1005—7277( 2007) 01—0052—05
基于光电码盘传感器的位置检测控制电路设计
赵建周, 李安伏 ( 安阳工学院, 河南 安阳 455000)
而 CPU 读取的是锁存器的数据, 这样就解决
2007 年 第 1 期
赵建周, 李安伏 基于光电码盘传感器的位置检测控制电路设计
·55·
了两者间的同步问题。为了避免发生锁存器在锁 存期间 CPU 读数, 将 CPU 的读信号引至与门 A, 用于封锁数据锁存。由此可见, 这样的接口电路, 可能引起的A / D 转换误差为一个码, 一般是符合 A / D 转换器的设计精度的。
2 位置检测单元电路设计
位置检测单元主要用于检测被控对象的位 置, 其原理是累计与电机同轴的增量码盘发出的 脉冲数。
电路板的主要结构框图如图 1 所示。在这块板 的设计过程中, 因别的用户要求和基于通用性的考 虑, 又增加了方波脉冲信号产生、计数功能电路。这 样, 这块板既可在有速度环的基础上用来作为位置 反馈接口转换电路和其它环节配合构成位置闭环 控制系统, 又可通过控制脉冲产生的频率和产生的 脉冲个数作为基准脉冲系统的位置给定[ 1 ] 。
同理, 可判断出, 当反转时, 由于 B 超前 A 90°, 对应每一个 A 脉冲, CP+始终为高电平, CP- 有 负脉冲输出。
码盘输出的脉冲经方向判别电路被分解为 CP+、CP- 两路脉冲。正转时 CP+有脉冲, CP- 为高 电平; 反转时 CP- 有脉冲而 CP+为高电平。两路脉
冲送到具有双时钟的可逆计数器计数, 所计的数 值即为编码结果。 2.4 可逆计数器电路
2.6 输入输出电路( 应答联络信号) 输入输出指开关量I / O, 主要实现 CPU 与速
度 环 的 联 相 的 设 定 、读 取 ( 如 清 零 是 否 、结 束 等 ) 。 本系统提供一路继电器输出, 用于发出和速度单 元联络的握手信号; 一路集电极开路 输出( 备用); 三路光隔输入, 分别用 于接收速度单元的准备好回馈信号、 限位开关状态输入和零位开关状态 输入。由于电路简单, 这里不再细述。 2.7 关于 16 位输入输出信号 IO16CS
码盘计数器选用 74LS193 [8 ]。74LS193 为 4 位 可预置的二进制同步加 / 减计数器( 双时钟) , 当清 除端 MR 为高电平时, 不管时钟端 CU、CD 状态如 何 , 输 出 端 ( Q3- Q0) 即 可 置 成 与 数 据 输 入 端 ( D3- D0) 相一致的状态。74LS193 的计数是同步的。靠 CU、CD 同 时加在四个 触发器上而 实现的。 在 CU 或 CD 上升沿作 用下, 同时变 化, 从而消除 了异步 计数器出现的计数尖峰。当进行加或减计数时可 分别利用 CU 或 CD, 此时另一时钟应为高电平。
具体判向过程分析如下: 对应 C 点的与非门 U20: A 的两个 输入端, 一 个( 2 脚) 直接取自 A 脉冲, 另一个( 1 脚) 是 A 脉冲 反相后经 RC 积分电路得到的。这样当 A 脉冲从低 电平跳变到高电平后, 即 A 脉冲的前沿瞬间, 该与
·54·
电气传动自动化
2007 年 第 1 期
( 1) 利 用 74LS193 的 异 步 置 数 端 使 系 统 实 现 归零操作[ 1]
2007 年 第 1 期
赵建周, 李安伏 基于光电码盘传感器的位置检测控制电路设计
·53·
当系统发出运行命令, 被控对象在控制器控 制下运行至某一预定位置时, 可以通过及时控制 74LS193 的异步置数控制端 PL 为低电平, 通过数 据总线把欲定义的数据写入 74LS193, 实现归零操 作。这样, 归零的含义即被拓宽, 既可使计数器清 零, 实现传统意义上的归零, 又可向计数器写入某 一代表一个固定位置的数据, 以给增量码盘一个 起始位置。
Key wor ds: position detecting; circuit; design
1 引言
电动机作动力的系统中的位置检测与控制方 法很多, 本文介绍一种由光电码盘做传感器的位 置检测和控制的电路设计。其主要设计内容包括 位置检测单元电路设计和输出控制电路设计两部 分。由于系统中数字和模拟信号共存, 所以在原理 设计和 PCB 版设计时, 必须注意抗干扰问题, 具体 可参阅有关文献[ 9][ 10] , 这里不再赘述。
摘要: 介绍一种由光电码盘做传感器的位置检测、控制电路的设计。针对光电码盘输出的三路信号 A、B 和 Z
脉冲 , 设 计了 脉 冲 整形 、判 向 专门 电 路 和清 零 电 路, 并 用 双 向可 逆 计 数器 准 确 记录 了 与 码盘 关 联 的电 机 轴 的
位置。输出控制的对象为速度单元或变频调速系统。
A 脉冲与 B 脉 冲相位相差 90°, 正 转 时 , A 超 前 B, 故 C 点负脉冲对应 B 的低电平“0”; D 点负脉冲对应 B 的高电平“1”, 这 样上边或门 U10: D 输出( 即 CP+) 对应每一个 A 脉 冲有一个负脉冲, 而下边或门 U10: C 输出( CP- ) 始 终为高电平。
对应 D 点的与非门 U20: B 的两个 输入端, 一 个(5 脚) 取自 A 脉冲反相, 即 A 非, 另一个(4 脚) 是 A 脉冲经 RC 积分电路得到。对应 A 脉冲的上 升沿, A 非为下降沿, 与非门由于一端输入为低电 平而输出高电平; A 脉冲上升沿后的高 电 平 通 过 R2 给 电 容 C2 充 电 , 0.3 μs 后充至高电平。当 A 脉冲出现下降沿 后,A 非马上变为 高 电 平 , 而 电 容 C2 要等 0.3 μs 后才能 由高放电至低电 平, 所以该与非门 也能输出一个负脉 冲。
非门直接与 A 脉冲相连的 2 脚立即变为高电平“1”, 而 1 脚由于电容 C1 的两端电压不能突变, 要有一个 放电的过程。当 R=1000 Ω, C=100 pF, 充放电时间常 数 t=R·C=1000* 100* 10-12s=10-7s=0.1 μs。充放电过 程约 3 倍的时间常数, 即 0.3 μs。也即这一端要等 0.3 μs 后才能变为低电平“0”。所以对应 0.3 μs 的 电容放电过程, 在 C 点能得到一个 0.3 μs 的负脉 冲。当 A 脉冲出现下降沿后, 由与非门逻辑易知, C 点将维持高电平。而这时另一端由 A 脉冲经反相 而 得 的 高 电 平 经 R1 给 电 容 C1 充 电 , 0.3 μs 后 该 端将呈高电平态, 为下一个 A 脉冲的前沿到来作 准备。
关键词: 位置检测; 电路; 设计
中图分类号: TM131, TP212.9
文献标识码: A
Design of position detecting contr ol cir cuit based on encoder sensor
ZHAO J ian- zhou, LI An- fu
( Anyang Institute of Technology, Anyang 455000, China)
在可逆计数期间 CPU 来读取数据, 造成数据的错 误, 与 CPU 的接口电路应由数据锁存器和三态缓冲 器及一些门电路组成。如图 6 所示。此电路利用了 CP+或 CP- 脉冲的前 沿锁 存 来 自 可 逆 计 数 器 的 数 据。由于可逆计数器是利用 CP+或 CP- 的后沿计数 的, 因此, 锁存器锁存的是计数器稳定后的数据。
由图 1 中可以看出, 整个电路主要由长线接 收 电 路 、脉 冲 整 形 、判 向 电 路 、可 逆 计 数、长线发送电 路, 中断控制逻辑电路和数模转换等组成。
2.1 归零电路设计 由于增量码盘没有初始零位置, 且相应计数器
在机器上电时上随机状态, 故系统开始工作前必 须进行归零操作, 即给计数器清零, 以确定增量码 盘轴的起始位置。本系统清零提供两种方式: 一种 是利用硬件电路自动清零; 另一种是处理机在适 当时候向 74LS193 计数器施行写数操作。具体电 路如图 2 所示。
( 2) 使用硬件电路实现自动归零 计数器清零的方法和过程如下: 如 图 2 所 示 的 零 位 开 关 S1 要 安 装 在 被 控 对 象的物理零位处, 并且要求零位开关受压闭合的 时间必须大于增量码盘转一周对应的时间。这样 当被控对象运动至零位附近压迫零位开关闭合 后 , 光 耦 导 通 , U3: A 非 门 输 入 端 呈 低 电 平 “0”, 经 过反相器反相, 与门 U21: C 的 9 端为高电平“1”。 由于与门的另一端 10 接增量码盘的 Z 脉冲, 当 Z 脉冲来时与门打开输出高电平“1”。如果这时清零 允许控制触发器 U2: A 的输出为“1”, 即为允许态, 与门 U21: D 也呈打开状态, 输出高电平“1”。这个 输出高电平一方面接 74LS193 的异步清零端 MR, 使其瞬间清零, 实现归零目的; 另一方面经反相器 反相接到清零允许控制触发器 U2: A 的清零端, 使 其输出为“0”, 封锁清零控制与门。以后即使被控 对象再压迫零位开关, Z 脉冲同时又来, 再也不会 对计数器进行清零操作。CPU 通过地址口 Y6 可查 询清零是否完成。由于清零控制触发器的输出经 74LS126 驱动缓冲接至数据总线的 DO 上, 所以通 过简单指令即可完成查询工作。 2.2 长线收发电路 由于处理机与工作电机所处现场( 码盘所在位