基于小波神经网络的分数阶PI~λD~μ控制器的设计
分数阶PID控制在电动变载荷加载系统中的应用

第27卷㊀第8期2023年8月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.8Aug.2023㊀㊀㊀㊀㊀㊀分数阶PID 控制在电动变载荷加载系统中的应用刘福才,㊀王海澎(燕山大学工业计算机控制工程河北省重点实验室,河北秦皇岛066004)摘㊀要:针对电动变载荷加载系统中存在的强耦合㊁加载过程中的多余力干扰㊁电机内部的高度非线性化和时变性等问题,为提高电动变载荷加载系统的动态性能和控制效果,将分数阶PID 控制器应用于电动变载荷加载系统中,该控制器较常规PID 多了2个可调参数,能更灵活地控制受控对象,采用Oustaloup 近似化方法对分数阶算子近似化处理,用改进惯性权重ω的粒子群优化算法对分数阶PID 控制器参数进行整定优化㊂选取不同加载压力的输出波形对电动变载荷加载系统模拟仿真并在电动变载荷摩擦磨损试验平台上进行加载试验,通过实验数据求出加载过程中的摩擦力㊁摩擦系数和加载压力的跟踪曲线与误差曲线图,然后和常规PID 对比㊂试验结果表明,分数阶PID 控制器抗干扰性强㊁跟踪精确度高,有更好的控制效果㊂关键词:电动变载荷加载系统;分数阶PID ;近似化;粒子群优化;加载压力;输出波形DOI :10.15938/j.emc.2023.08.010中图分类号:TM921文献标志码:A文章编号:1007-449X(2023)08-0091-09㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2022-05-11基金项目:国家自然科学基金联合基金项目(U22A2050);河北省自然科学基金(F2022203043);省级重点实验室绩效补助经费项目(22567612H )作者简介:刘福才(1966 ),男,教授,博士生导师,研究方向为空间机构运动特性分析与控制技术;王海澎(1997 ),男,硕士研究生,研究方向为机电一体化机构设计与控制㊂通信作者:刘福才Fractional order PID control in an electric variable load loading systemLIU Fucai,㊀WANG Haipeng(Hebei Provincial Key Laboratory of Industrial Computer Control Engineering,Yanshan University,Qinhuangdao 066004,China)Abstract :Aiming at the problems of the strong coupling in the electric loading system,the surplus force interference during loading,and the highly nonlinear and time-varying inside the motor,to improve the dynamic performance and control effect of the electric loading system,the fractional order PID controller is used in electric variable load loading system.The controller has two more adjustable parameters than the conventional PID,and have more flexible control of controlled objects.The Oustaloup approximation method was used to approximate the fractional order operator and the parameters of the fractional order PID controller were rectified and optimised using a particle swarm optimisation algorithm with improved inertia weights.Simulation of an electric variable load loading system with selected output waveforms for different loading pressures and loading tests on an electric variable load friction and wear test rig were conducted.Plot of the tracking curve and error curve of the friction force,coefficient of friction and load-ing pressure during loading were derived from experimental data,and then compared with conventional PID.The experimental results show that the fractional order PID controller is more resistant to disturb-ances,and has high tracking accuracy and good control effects.Keywords :electric variable load loading systems;fractional order PID;approximation;particle swarmoptimization;loading pressure;output waveform0㊀引㊀言摩擦与磨损是生活中普遍存在的问题,在机器或是装备的运行中,相互接触的零部件之间的摩擦磨损现象是不可避免的㊂它会造成机械能损耗㊁产生噪音,对零部件造成变形㊁摩擦,影响其寿命[1]㊂摩擦磨损试验机是实现对一种特性材料在给定的条件下对摩擦磨损性能的探究,并能求得摩擦力与摩擦系数的模拟试验机㊂摩擦磨损试验机的出现对生产中减少能源损耗㊁提高生产效率等方面起着重大作用㊂然而研究摩擦磨损试验机的关键是对加载压力的控制,目前试验机主要存在机械㊁气动和电动3种加载形式[2]㊂随着电机制造水平和控制技术的不断提高,以电机作为驱动力的电动加载技术逐渐成为时代潮流㊂相比于机械式加载控制精确度低㊁无法实现变载荷加载和气动式存在空气可压缩性㊁气体流动的复杂性等问题,电动加载技术具有加载精确度高㊁跟踪速度快㊁结构简单㊁成本较低等优点㊂但电动加载系统存在强耦合㊁电机内部的高度非线性化以及加载过程中的多余力干扰等问题㊂为解决以上问题,更好地实现电动加载系统的控制性能,诸多学者对其进行了研究㊂文献[3]提出基于结构不变性原理,实验结果表明引入舵机的轴角速度作为前馈补偿后,能够有效地减小电机多余力矩的干扰㊂文献[4]构造了小脑模型神经网络(cerebellar model articulation controller,CMAC)与模糊控制相结合的复合控制方法,提高了系统的稳定性和鲁棒性㊂文献[5]提出了一种以速度闭环㊁转矩闭环以及位置闭环补偿的复合控制策略,其中转矩闭环采用模糊自适应PID控制算法㊂通过实验,复合控制方法在保证了加载精确度和动态性能的前提下,具有很强的鲁棒性和抗扰性㊂文献[6]采用自抗扰控制对四旋翼无人机在受到内部参数以及外部环境干扰的前提下进行测试,结果表明,所用的自抗扰控制算法有效地降低了外来干扰,提高了系统的准确性㊂上面涉及的几种控制算法虽然能有效地降低干扰性,起到不错的控制效果,但其存在控制器设计繁琐,推导计算量大等问题,因此本文采用分数阶PID控制(fractional order PID,FOPID),FOPID控制结构简单㊁易于理解㊁应用方便,较普通PID控制多了2个自由度[7-8],进一步扩大了参数整定范围,提升了控制能力和控制精确度,使其具有更好的动态性能和鲁棒性,提高了控制效果㊂1㊀试验机加载系统模型分析1.1㊀加载系统原理试验机的加载系统主要由伺服电机及其驱动器㊁压力传感器㊁电动缸㊁摩擦压头和样品台组成㊂其中压力传感器内置于电动缸中,装置示意图如图1所示,工控机通过PCI-1710U板卡对压力传感器产生的压力信号进行采集,将采集到的压力信号利用所编写好的程序代码进行数据去值滤波处理并同给定的期望输入信号做差求得误差信号㊂然后将误差信号经过分数阶PID控制算法所产生的输出信号经过转换后通过PCI-1720U模拟量输出卡发送-10V到+10V的转矩指令作用于伺服电机驱动器,伺服电机驱动器接到转矩指令后驱动伺服电机进行旋转运动,伺服电机通过丝杠将其旋转运动转化为电动缸竖直方向的直线运行,从而实现摩擦压头对样品台的加载试验㊂图1㊀电动加载系统实验装置示意图Fig.1㊀Schematic diagram of the experimental setup of the electric loading system1.2㊀加载系统数学模型伺服电机的电压平衡方程为U=iR+L d i d t+E㊂(1)电机电枢反电动势为E=K eω㊂(2)电机的转矩平衡方程为T m=J dωd t+Bω+T L㊂(3)电磁转矩可表示为T m=K T i㊂(4)式中:U为电机电枢电压;i为电机电流;R为电枢29电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀纽回路总电阻;E 为电枢反电动势;K e 为电机反电动势系数;ω为电机旋转角速度;T m 为电动机电磁转矩;J 为转动惯量;B 为电机阻尼系数;T L 为电机轴输出转矩;K T 为电动机转矩系数㊂由式(1)~式(4)可知伺服电机模型传递函数为G 0(s )=K TLJs 2+(LB +RJ )s +BR +K e K T㊂(5)由文献[9]电动缸输出轴直线位移为:y =θh 2π;θ(t )=ʏtω(t )d t ㊂üþýïïïï(6)压力传感器模拟输出值为F =K f y ㊂(7)式中:h 为滚珠丝杠导程;K f 为压力增益㊂由式(5)~式(7)得试验机加载系统开环传递函数为G (s )=K T K f h2π[LJs 3+(LB +RJ )s 2+(BR +K e K T )s ]㊂(8)1.3㊀加载过程中摩擦力与摩擦系数的获取本试验机摩擦力的获取采用间接测量方法,首先将传动系统中的伺服电机以60r /min 的转速带动样品台空载运行,获得其电机空载转矩T 0,然后加载系统进行加载试验,获得电机在力加载情况下的输出转矩T ,并由游标卡尺测量加载压头距样品台旋转中心的距离R ,则加载过程中的摩擦力f 和摩擦系数μ可以表示为:f =T -T 0R;μ=f F N ㊂üþýïïïï(9)式中F N 为加载压力㊂2㊀分数阶PID 控制器2.1㊀控制器设计FOPID 是由Podlubny 最早提出的[10],其在继承了传统PID 控制的基础上新增了积分阶次和微分阶次两个可调参数,增加了控制器的调节范围,改善了控制器的性能㊂其结构框图如图2所示㊂FOPID 微分方程表达式为u (t )=K p e (t )+K i D -λe (t )+K d D μe (t )㊂(10)式中:u (t )为控制器输出;e (t )为控制器输入;λ和μ为控制器的积分阶次和微分阶次;K p ㊁K i ㊁K d 为控制器增益参数㊂图2㊀FOPID 控制器结构框图Fig.2㊀Block diagram of the FOPID controller structure控制器传递函数为C (s )=K p +K i s -λ+K d s μ㊂(11)当λ和μ取不同值时,可以得到分数阶PID 控制器的不同形式,如图3所示㊂由图可知,整数阶PID 控制器只是分数阶PID 控制器λ和μ取值为0或1的4个特殊点,因此分数阶PID 参数整定范围更大,控制更加灵活,能更好地调节系统的动态性能,达到最佳的控制效果㊂图3㊀λ、μ参数取值图Fig.3㊀Diagram of the values of the λand μparameters2.2㊀分数阶PID 控制系统稳定性分析一般来说,对于任何控制系统要稳定的充要条件是特征方程根位于S 平面的左半面,但是分数阶系统的稳定性不同于整数阶,由Matignon 的稳性定理可知,一个稳定的分数系统可能在S 平面的右半部分有根㊂下面进行稳定性详细分析[11]:一般分数阶系统特征方程为α0s β0+α1sβ1+ +αn sβn=ðni =0αi s βi=0㊂(12)将βi =v iv,α=s 1v 代入式(12)得39第8期刘福才等:分数阶PID 控制在电动变载荷加载系统中的应用ðni =0αi sv iv=ðni =0αi σv i ㊂(13)由上式可知,通过代数转换将S 平面的分数阶系统特征方程转化为σ平面的整数阶系统形式,从而能够间接使用劳斯判定准则判定系统稳定的充要条件为π2v <|arg(σ)|<πv㊂(14)将得到的分数阶系统稳定性区域和传统整数阶系统的稳定性区域做比较,如图4所示,可以看出,分数阶控制系统的稳定区域比整数阶控制系统的稳定区域范围要广,更加灵活可控㊂图4㊀控制区域稳定示意图Fig.4㊀Control area stabilisation schematic2.3㊀实现方式由于分数阶微积分算子是一个复变量s 的无理化函数,其特征方程一般来说不是常规的多项式,在数值仿真与实际应用中不能够直接应用,因此用一个有限的微分方程来近似是分数阶微积分算子数字实现的关键[12]㊂本文采用Oustaloup 近似化方法[13],假定选定拟合频率段为(ωb ,ωh ),其近似的有理传递函数模型为G (s )=K ᵑNk =-N s +ωᶄks +ωk㊂(15)其中:ωᶄk =ωbωhωb()k +N +12(1-γ)2N +1;ωk =ωb ωhωb ()k +N +12(1+γ)2N +1;K =ωγh ㊂üþýïïïïïïï(16)式中:γ为分数阶阶次;2N +1为近似化次数㊂2.4㊀控制器参数整定由于分数阶PID 控制器多了2个可调参数,使得控制器的控制更加灵活,但是也给分数阶PID 控制器的参数整定造成了困难,只有合理地选择参数才能达到更理想的控制效果㊂本文将粒子群优化算法用于分数阶PID 控制器中,以此对控制器参数进行优化整定㊂粒子群优化算法(particle swarm opti-mization,PSO)是1995年由Eberhart 和Kenney 通过模拟鸟类捕食行为而提出的一种群体智能优化算法[14]㊂在一个D 维目标搜索空间中,有N 个粒子组成一个粒子群体,第i 个粒子的位置和速度为x i =(x i 1,x i 2, ,x iD )和v i =(v i 1,v i 2, ,v iD ),该粒子在整个搜索过程中所经历的最优位置称为个体极值p best =(p i 1,p i 2, ,p iD ),粒子群体目前搜索的最优位置称为全局极值g best =(p g 1,p g 2, ,p gD ),在迭代过程中粒子通过自身的个体极值和群体的全局极值来更新自己的速度和位置,直到满足设定好的迭代终止条件,得出最优解并引用适应度函数作为评价因子,具体更新公式如下:v k +1id =ωv k id +c 1r 1(p k id -x k id )+c 2r 2(p k gd -x k id );x k +1id =x k id +v k +1id ㊂}(17)式中:i =1,2, ,N 为粒子数;d =1,2, ,D 为向量维数;k 为当前迭代次数;c 1,c 2为非负的权重系数;r 1,r 2是分布于[0,1]区间的随机数;ω为惯性权重因子,用来调节算法的全局和局部搜寻能力㊂一个较大的惯性权值有利于全局搜索,而一个较小的惯性权值则更利于局部搜索㊂通常取权重系数ωmax =0.9,ωmin =0.4时算法性能最好,在合理的迭代次数里寻找全局最优值能力较好,所需迭代次数最少[15]㊂惯性权重由0.9递减至0.4,迭代初期保持了较强的全局搜索能力,而迭代后期有利于算法进行更精确的局部搜索㊂目前常采用ω惯性权重公式为ω=ωmax -t (ωmax -ωmin )t max㊂(18)式中:t max 为最大迭代次数;t 为当前迭代次数㊂虽然该方法让惯性权重不再是一个固定值,使得迭代过程中前期全局搜索能力增强,后期局部搜索能力增强,但惯性权重的变化率是固定值,可能会在较强的搜索条件下不能更好寻求最优值㊂本文在49电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀上式以及文献[16]的启发下,对惯性权值进行改进,令:ω=ωmax (1-a 3)+ωmin rand a 3;a =t t max ㊂}(19)改进之后惯性权重变化率不再是固定的,引入rand 函数体现了粒子群搜索过程的随机性㊂在粒子群的搜索初期,ω变化较慢,取值较大,加大了粒子的全局搜索能力;后期ω变化较快取值较小,提高了局部搜索能力,这样利于算法跳出局部最优而求得最优解,提高了算法的求解精确度㊂适应度函数选用ITAE 积分评价函数[17],即ITAE =ʏɕt |e (t )|d t ㊂(20)式中e (t )为误差㊂3㊀实验验证为了更进一步地探究分数阶PID 控制在实际系统中的控制效果,在电动变载荷摩擦磨损试验机平台上进行加载实验,分别采用恒值㊁三角波㊁方波㊁正弦波4种不同的典型信号作为加载系统载荷的期望跟踪曲线,实验平台如图5所示㊂分别在样品台静止和旋转时进行加载试验,样品台旋转相当于对加载系统在加载实验时引入了外部干扰㊂实验中设定传动系统中的伺服电机以60r /min 的转速带动样品台进行旋转实验,并通过工控机实时读取并储存加载实验数据,由旋转伺服电机转矩值及电动缸加载的压力值求得加载过程中的摩擦力和摩擦系数,并通过数据进行绘制相应曲线的加载载荷跟踪曲线㊁误差跟踪曲线和摩擦力与摩擦系数曲线㊂图5㊀电动变载荷加载系统实验装置示意图Fig.5㊀Schematic diagram of the experimental setup ofthe electric variable load loading system3.1㊀恒值加载图6为在加载实验载荷F =100N 的恒值信号下样品台在静止时和旋转时加载压力的跟踪曲线及误差曲线图㊂图6㊀恒值加载实验曲线图Fig.6㊀Experimental graph for constant value loading59第8期刘福才等:分数阶PID 控制在电动变载荷加载系统中的应用由图6可知,分数阶PID 控制较传统PID 控制反应速度快㊁超调量小,在有外部干扰的情况下,FOPID 能更好地减小系统的振荡,保证系统的稳定性㊂图7为在不同恒值力加载实验条件下摩擦力与摩擦系数曲线图㊂图7㊀恒值下摩擦力与摩擦系数曲线图Fig.7㊀Friction and friction coefficient graphs可以看出,恒值力越大,加载过程中的摩擦力越大,摩擦系数越小,曲线走势和压力跟踪曲线类似㊂3.2㊀三角波加载图8为加载载荷信号幅值F =50N,周期T =6s 的三角波信号下样品台在静止和旋转时的压力跟踪曲线及误差曲线㊂由图8可知,在三角波加载条件下,曲线振荡相对较大,FOPID 控制在曲线的尖端突变处的误差相对较小,曲线跟踪效果优于PID 控制㊂图9为三角波信号在不同幅值力加载过程中的摩擦力与摩擦系数曲线图㊂从图中可知,摩擦力曲线与加载力的跟踪曲线类似,加载力越大摩擦力就越大,摩擦系数的变化相对平稳,只在加载力曲线最底端发生突变㊂3.3㊀方波加载图10为输入加载载荷信号幅值F =100N,周期T =6s 的方波信号下样品台在静止和旋转时的压力跟踪曲线及误差曲线图㊂图8㊀三角波加载实验曲线图Fig.8㊀Experimental graph of triangular wave loading69电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图9㊀摩擦力与摩擦系数曲线图Fig.9㊀Friction and friction coefficientgraphs图10㊀方波加载实验曲线图Fig.10㊀Experimental graph of square wave loading由图10可以看出,曲线在突变处具有一定的滞后性,FOPID控制的超调量比传统PID控制小,响应速度快,在引入外部干扰后,曲线的误差变大,但FOPID仍能展现良好的跟踪效果㊂图11为方波信号在加载力幅值不同时加载过程中的摩擦力与摩擦系数曲线图㊂由图可知,摩擦力在波形突变处变化较大且摩擦系数在信号发生阶跃突变处变化较剧烈,从侧面反映出加载力跟踪在突变处较为振荡㊂3.4㊀正弦波加载图12为输入加载载荷信号幅值F=200N,周期T=6s的正弦信号下样品台在静止和旋转时的压力跟踪曲线及误差曲线㊂由图可知,在传统PID控制下曲线在峰值处出现了明显的滞后性;在引入外部干扰后,曲线误差虽然变大,但FOPID控制的曲线较为光滑平稳,误差相对较小,能够更好地对加载系统实时控制跟踪㊂图13为正弦信号在加载力不同时加载过程中的摩擦力与摩擦系数曲线图㊂79第8期刘福才等:分数阶PID控制在电动变载荷加载系统中的应用图11㊀摩擦力与摩擦系数曲线图Fig.11㊀Friction and friction coefficientgraphs图12㊀正弦波加载实验曲线图Fig.12㊀Experimental graph of sine waveloading图13㊀摩擦力与摩擦系数曲线图Fig.13㊀Friction and friction coefficient graphs89电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀从图13可以看出,正弦波的摩擦力曲线和三角波形状类似,但摩擦系数在峰谷处变化较大,且加载力越小突变越剧烈,从侧面说明了加载力越大,曲线的误差越小,其跟踪效果越好㊂4㊀结㊀论针对电动加载系统中存在的强耦合㊁多余力干扰等问题,在传统PID控制的基础上提出了分数阶PID控制,对分数阶系统进行了稳定性分析和实现方案的设计,并利用改进惯性权重之后的粒子群优化算法对控制器的参数进行优化整定㊂对分数阶PID控制进行了模拟仿真,同时为了弥补现有文献只通过仿真验证分数阶PID的不足,将其应用于电动变载荷摩擦磨损试验机平台上,把仿真与实验结果和传统PID控制进行对比,可知分数阶PID控制响应更快,稳态精确度更高,更好地提高了电动变载荷系统的动态性能和鲁棒性㊂参考文献:[1]㊀庞佑霞,黄伟九,谭援强.工程摩擦学基础[M].北京:煤炭工业出版社,2004.[2]㊀王伟,孙见君,涂桥安,等.摩擦磨损试验机发展现状研究[J].机械设计与制造工程,2015,44(7):1.WANG Wei,SUN Jianjun,TU Qiaoan,et al.Research on the de-velopment status of friction and weartesting machine[J].Mechani-cal Design and Manufacturing Engineering,2015,44(7):1. [3]㊀李成功,靳红涛,焦宗夏.电动负载模拟器多余力矩产生机理及抑制[J].北京航空航天大学学报,2006(2):204.LI Chenggong,JIN Hongtao,JIAO Zongxia.Mechanism of excess torque generation and suppression in electric load simulators[J].Journal of Beijing University of Aeronautics and Astronautics,2006(2):204.[4]㊀CHEN J,HAN W,ZHAO P,et al.The study on path trackingcontrol method based on fuzzy-CMAC for autonomous vehicle in ru-ral environment[C]//2020IEEE International Conference on Sig-nal Processing,Communications and Computing(ICSPCC),Au-gust21-24,2020,Macau,China.2020:1-4.[5]㊀吕帅帅,林辉,樊明迪.电动加载系统多闭环复合控制[J].电机与控制学报,2015,19(9):16.LÜShuaishuai,LIN Hui,FAN Mingdi.Multi-closed-loop compos-ite control of electric loading system[J].Electric Machines and Control,2015,19(9):16.[6]㊀NAJM A A,IBRANHEEM I K.Altitude and attitude stabilizationof UAV quadrotor system using improved active disturbance rejec-tion control[J].Arabian Journal for Science and Engineering,2020,45(3):1985.[7]㊀薛定宇,赵春娜.分数阶系统的分数阶PID控制器设计[J].控制理论与应用,2007,24(5):771.XUE Dingyu,ZHAO Chunna.Fractional-order PID controller de-sign for fractional-order systems[J].Control Theory and Applica-tions,2007,24(5):771.[8]㊀邓立为,宋申民,庞慧.控制系统的分数阶建模及分数阶PIλDμ控制器设计[J].电机与控制学报,2014,18(3):85.DENG Liwei,SONG Shenmin,PANG Hui.Fractional-order mod-el of control system and design of fractional-order PIλDμcontroller [J].Electric Machines and Control,2014,18(3):85. [9]㊀刘福才,赵旭.电动变载荷加载系统的建模及线性自抗扰控制[J].高技术通讯,2020,30(7):716.LIU Fucai,ZHAO Xu.Modeling and linear self-anti-disturbance control of an electric variable load loading system[J].High Tech-nology Communications,2020,30(7):716.[10]㊀PODLUBNY I.Fractional-order systems and PI/sup/spl lamb-da//D/sup/spl mu//-controllers[J].IEEE Transactions on au-tomatic control,1999,44(1):208.[11]㊀CHOUDHARYS K.Stability and performance analysis of frac-tional order control systems[J].Wseas Transactions on Systemsand Control,2014,9(45):438.[12]㊀GUIJARRO N,DAUPHIN TANGUY G.Approximation methodsto embed the non-integer order models in bond graphs[J].SignalProcessing,2003,83(11):2335.[13]㊀齐乃明,宋志国,秦昌茂.基于最优Oustaloup的分数阶PID参数整定[J].控制工程,2012,19(2):283.QI Naiming,SONG Zhiguo,QIN Changmao.Fractional order PIDparameter tuning based on optimal Oustaloup[J].Control Engi-neering,2012,19(2):283.[14]㊀KENNEDY J,EBERHART R.Particle swarm optimization[C]//Proceedings of ICNN 95-International Conference on Neural Net-works,November27-December1,1995,Perth,WA,Austral-ia.1995:1942-1948.[15]㊀SHI Y,EBERHART R.A modified particle swarm optimizer[C]//1998IEEE International Conference on Evolutionary Com-putation Proceedings.IEEE World Congress on Computational In-telligence,May4-9,1998,Anchorage,AK,USA.1998:69-73.[16]㊀邵鹏,吴志健.一种带正弦函数因子的粒子群优化算法[J].小型微型计算机系统,2015,36(1):156.SHAO Peng,WU Zhijian.A particle swarm optimization algo-rithm with sine function factor[J].Small Microcomputer Sys-tems,2015,36(1):156.[17]㊀MAURYA A K,BONGULWAR M R,PATRE B M.Tuning offractional order PID controller for higher order process based onITAE minimization[C]//2015Annual IEEE India Conference,December17-20,2015,New Delhi,India.2015:1-5.(编辑:邱赫男)99第8期刘福才等:分数阶PID控制在电动变载荷加载系统中的应用。
基于小波分析的分数阶系统辨识

基于小波分析的分数阶系统辨识【摘要】本文探讨了基于小波分析的分数阶系统辨识方法。
引言部分介绍了研究背景、研究目的和研究意义。
接着介绍了小波分析理论和分数阶系统概念,然后详细阐述了小波分析在分数阶系统辨识中的应用。
在此基础上提出了基于小波分析的分数阶系统辨识方法,并对实验结果进行了分析。
结论部分总结了基于小波分析的分数阶系统辨识方法的优势和局限性,并展望了未来的研究方向。
通过本文的研究,我们可以更好地理解分数阶系统,并为实际应用提供参考。
【关键词】小波分析、分数阶系统、辨识、理论、应用、方法、实验结果分析、总结、展望1. 引言1.1 研究背景分数阶系统是指系统的传输函数中包含非整数阶微分或积分的一类系统。
与传统的整数阶系统相比,分数阶系统在描述复杂动态行为、非线性性质和记忆特性等方面具有独特优势,因此在工程与科学领域有着广泛的应用。
随着分数阶系统的研究逐渐受到关注,人们对其进行了深入的探讨与分析。
在实际应用中,分数阶系统的参数辨识成为一个关键的问题。
传统的系统辨识方法往往难以适用于分数阶系统,因此需要引入新的方法与技术来解决这一难题。
本文旨在探讨基于小波分析的分数阶系统辨识方法,通过理论分析与实验验证,探讨该方法在分数阶系统参数辨识中的有效性与实用性。
通过本文的研究,可以为分数阶系统的建模与控制提供新的思路与方法。
1.2 研究目的本文旨在探讨基于小波分析的分数阶系统辨识方法,并通过实验结果分析验证该方法的有效性。
具体目的如下:1.深入研究小波分析理论,理解其在信号处理领域的应用,并结合分数阶系统概念,为后续研究奠定理论基础。
2.探讨小波分析在分数阶系统辨识中的应用,分析其特点和优势,为提高分数阶系统辨识的准确性和效率提供参考。
通过以上研究目的,旨在为完善分数阶系统辨识技术,促进相关领域的发展,为实际工程应用提供技术支持和指导。
1.3 研究意义分数阶系统是一种介于整数阶和微积分阶之间的系统,其辨识在控制理论和工程实践中具有重要意义。
分数阶PIλDμ控制器的设计
分数阶PIλDμ控制器的设计
刘进英;李文
【期刊名称】《机械与电子》
【年(卷),期】2006(000)011
【摘要】提出了一种分数阶控制器的设计方法,首先对S-传递函数进行相应的Z变换,然后根据最短记忆法[1]用Grünwald-Letnicov分数导数定义取其近似项,来完成分数阶控制器的设计.仿真结果证明这种方法是可行有效性的.
【总页数】2页(P33-34)
【作者】刘进英;李文
【作者单位】大连交通大学,辽宁,大连,116028;大连交通大学,辽宁,大连,116028【正文语种】中文
【中图分类】TP273
【相关文献】
1.一种模糊自适应粒子群优化算法的分数阶PIλDμ控制器设计 [J], 那景童;张旭秀
2.分数阶系统模糊自适应分数阶PIλDμ控制器 [J], 梁涛年;陈建军;王媛;林智伟;崔星毅
3.控制系统的分数阶建模及分数阶Piλ Dμ控制器设计 [J], 邓立为;宋申民;庞慧
4.基于可调分数阶PIλDμ的无刷直流电动机转速控制器设计 [J], 唐鉴;丁跃浇;陈曦
5.锚杆钻车机械臂分数阶PIλ控制器设计及仿真研究 [J], 张君
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊估计的可调分数阶PID控制器设计

基于模糊估计的可调分数阶PID控制器设计黄博;丁跃浇;邹俊超【摘要】可变分数阶微分环节直接影响分数阶PID控制器性能,设计分数阶PID控制器需要根据被控对象传递函数凭经验调整微分阶次.采用Oustaloup间接离散法数字实现分数阶微积分,再基于模糊估计由特定分数阶次近似得到任意分数阶次微积分环节,根据参数整定规则确立各环节系数,设计了一种可调分数阶次的PID控制器.仿真实验证明,此方法得到的微积分环节对控制系统性能没有影响,根据整数阶被控对象传递函数调节微分阶次,分数阶PID控制器有较好的控制效果.【期刊名称】《微型机与应用》【年(卷),期】2017(036)012【总页数】5页(P4-7,12)【关键词】分数阶PID;可变分数阶微分;分数阶微分近似;模糊估计【作者】黄博;丁跃浇;邹俊超【作者单位】湖南理工学院信息与通信工程学院,湖南岳阳 414006;湖南理工学院机械工程学院,湖南岳阳 414006;湖南理工学院信息与通信工程学院,湖南岳阳414006【正文语种】中文【中图分类】TP273PID控制是控制工程中应用最广泛的控制方法。
分数阶PID控制则是建立在分数阶微分理论上的一种应用研究。
常分数阶微分的理论和应用研究目前已有很多研究成果,而对于时变分数阶微分的研究则是一个较新的领域。
文献[1-2]从分数阶微分定义出发,对不同定义下的时变分数阶微分进行了公式推导;文献[3-5]对时变分数阶微分在实数阶和复数阶下的近似做了研究,提出了带记忆全局反馈估计、不带记忆自反馈估计、带记忆零极点增益估计等多种近似方法;在变分数阶微分应用研究上,文献[6]设计了一种基于变分数阶微分的动力学控制器,文献[7]提出了一种变模式扩散过程的变分数阶微分方程求解方法,文献[8]针对机械臂控制,设计并实现了一种离散时间变分数阶PD控制器。
在以上研究基础上,根据时变分数阶微分理论,从应用角度出发,考虑到设计和实现分数阶PID控制器需要对分数阶微积分环节做近似处理以及对控制器参数进行整定,当根据被控对象传递函数凭经验确定控制器的微积分阶次时,设计复杂度较小;当被控对象受扰动或延时而使传递函数发生变化,凭经验无法确定控制器微积分阶次时,设计的复杂度就开始加大,因此可以设计一种可调分数阶次的PID控制器来实现控制所需的任意阶次微积分环节,这些可基于模糊估计的方式由特定阶次微积分环节近似得到,根据参数整定规则得到其余参数,从而可根据被控对象传递函数设计出所需的分数阶PID控制器。
PID控制经典培训教程

PID控制经典培训教程一、引言PID控制是自动控制领域最经典、应用最广泛的一种控制策略。
PID控制器因其结构简单、稳定性好、可靠性高、易于调整等优点,在工业控制、航空航天、技术等领域有着广泛的应用。
本教程旨在帮助读者深入理解PID控制原理,掌握PID控制器的设计、参数调整和应用技巧。
二、PID控制原理PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个环节组成,其基本原理是根据控制对象的实际输出与期望输出之间的误差,对控制对象进行相应的调节。
1.比例控制(P)比例控制是根据误差的大小进行调节,其控制作用与误差成正比。
比例控制可以减小误差,提高系统的响应速度。
但比例控制无法消除稳态误差,可能导致系统在期望值附近波动。
2.积分控制(I)积分控制是对误差的累积进行调节,其控制作用与误差的累积成正比。
积分控制可以消除稳态误差,提高系统的稳态性能。
但积分控制可能导致系统的超调量和响应速度降低。
3.微分控制(D)微分控制是对误差的变化率进行调节,其控制作用与误差的变化率成正比。
微分控制可以提高系统的稳定性和响应速度,减小超调量。
但微分控制对噪声敏感,可能导致系统在期望值附近波动。
三、PID控制器的设计与参数调整1.确定控制对象和控制目标在设计PID控制器之前,要明确控制对象和控制目标。
控制对象是指需要进行控制的物理量,如温度、压力、位置等。
控制目标是指期望的控制对象达到的值或状态。
2.选择PID控制器类型根据控制对象的特点和控制目标的要求,选择合适的PID控制器类型。
常见的PID控制器类型有:(1)P控制器:适用于控制对象无稳态误差或稳态误差较小的情况。
(2)PI控制器:适用于控制对象有稳态误差,且对响应速度要求较高的情况。
(3)PD控制器:适用于控制对象有稳态误差,且对超调量要求较低的情况。
(4)PID控制器:适用于控制对象有稳态误差,且对超调量和响应速度都有一定要求的情况。
分数阶PI λD μ控制器的设计方法——极点阶数搜索改进法
关键 词 : 分数 阶 P 控 制 器 ; 1 分数 阶控 制 系统 ; 点 ; 极 阶数
,
KD和 , 理 调 节 这 5个 参 数 , 以使 得 分 数 合 可
1 分数 阶控 制 系统
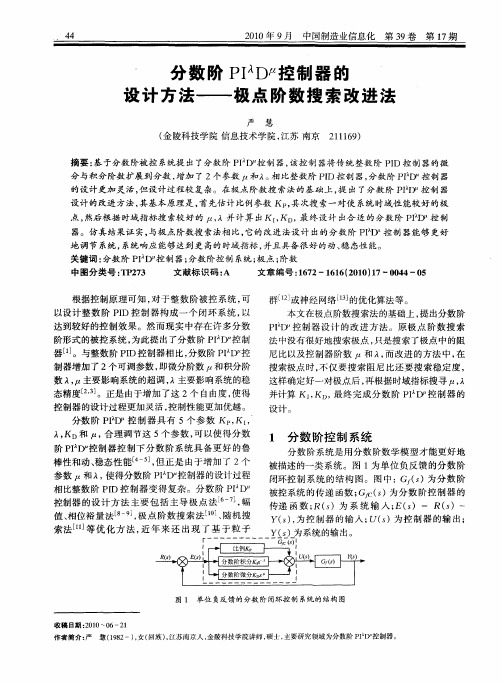
分数 阶系 统是 用 分数 阶数 学模 型 才 能更 好 地 被描述的一类 系统。图 1 为单位负反馈 的分数阶
阶 P 控制器控制下分数阶系统 具备更好 的鲁 1 棒 性 和动 、 态 性 能 _ J但 正 是 由于增 加 了 2个 稳 4 , 参 数 和 , 使得 分数 阶 P 控 制器 的设计 过程 I
分 与积 分阶数 扩展 到分 数 , 加 了 2个参数 和 。 比整 数 阶 P D控 制 器 , 数阶 P u 制 器 增 相 I 分 r 控 D
的设 计更加 灵 活 , 设计 过程较 复 杂 。在 极 点阶数 搜 索法 的基 础 上 , 出 了分数 阶 Ha = 制 器 但 提 D 控
设计 的 改进 方 法 , 基本 原理 是 , 其 首先估 计 比例参数 KP其 次搜 索一 对使 系统 时域 性 能较好 的 极 , 点, 然后根 据 时域指 标搜 索较 好 的 , 并计 算 出K【KD 最 终设 计 出合 适 的分 数 阶 P 控 制 , , 1
群 [ 1 神经 网络 [ ] 化算 法等 。 1或 2 1 的优 3 本 文在 极点 阶数搜 索法 的基 础上 , 出分数 阶 提 P 控 制 器 设 计 的改 进 方 法 。原 极 点 阶数 搜 索 1
基于神经网络的分数阶PI_控制器的设计与实现_赵慧敏

第29卷 第1期2008年2月大连交通大学学报J OURNAL OF DAL I AN JI AOTONG UN I VER SI TYV o.l29 N o.1F eb.2008文章编号:1673 9590(2008)01 0063 05基于神经网络的分数阶PI 控制器的设计与实现赵慧敏,李文,邓武(大连交通大学软件学院,辽宁大连116028)*摘 要:分数阶控制器与传统P ID控制器相比具有更好的适应性,并且为更好地调节分数阶控制系统性能提供了可能性.然而,由于分数阶控制器引入了两个附加的参数 和 ,从而使分数阶PI D 控制器参数的确定变得更加困难.为了改进这一问题和进一步提高分数阶P I D 控制器对系统不确定性的适应能力,文章简明且不失一般性地提出了一种基于神经网络的参数自调整分数阶P I 控制器.讨论了所采用的离散化方法和分数阶控制器的设计方法,对神经网络结构和控制器参数自调节方法给出了详细论述.实验结果表明,所设计的控制器不仅保持了常规分数阶PI 控制器的特性,而且还具备了更好的适应性和参数自调节能力.关键词:神经网络;分数阶控制器;参数自调节中图分类号:Q241.4文献标识码:ADesign and I mplem ent of Neural Net work BasedF ractional O rder ControllerZ HAO Hu i m i n,LIW en,DENG W u(So ft wa re Institute,D a li an Ji ao t ong U n i ve rsity,D alian116028,Chi na)A bstract:Fracti o na l-order controller ism o re flex i b l e and g i v es an opportunity to better ad j u stthe dyna m i c al pr operties of a fracti o na l order contr o l syste m than the traditi o na l PI D controller.H o w ever,the se lecti o n of contro ller para m eters i s m ore difficult for afractional order P I D contro ller wh ich introduces add iti o na l t w o para m eters and .For better adapti v e capac ity o f syste m uncertainty w ithout genera lity loss,a fractional order P I controller w ith self tun i n g para m eters is presented based on neura l net w ork.The d iscretization m ethod used and the m aterial design m ethod of fractional o r der P I contro ller are descri b ed,and the architect u re o f bac k propagation neural net w orks and para m eters self tun i n g algorith m of the contro ller are discussed indeta i.l The experi m ent results sho w that the controller presented can m a i n tain the perfor m anceo f the nor m al fractional or der PI controller,w hile possesses better flex i b ility and para m etersse lf tuning ability.K ey words:neura l net w ork;fractional o r der controller;para m eters self tun i n g分数微积分的概念与古典微积分的概念几乎是同时提出来的,距今为止已有300多年的历史.最早是由莱布尼兹提出的,而后其他人又对分数微积分的理论和应用做了很多杰出的贡献.尤其是在过去的十年里,除了对分数阶微积分理论的研究以外,其实际应用在不同的领域中也有了大量的增长,例如,长*收稿日期:2007 04 08基金项目:教育部科学技术研究资助项目(204032)作者简介:赵慧敏(1977-),女,讲师,硕士E m ai:l ji91m aozh m@64 大连交通大学学报第29卷距离输电线路、温度控制、电机传输系统等[1].在这些理论研究中,一些作者提出了分数阶P ID控制器并且分析了系统响应和参数 和 之间的关系.分数阶控制器与传统PI D 控制器相比具有更好的适应性,并且为更好地调节分数阶控制系统性能提供了可能性.然而,由于分数阶控制器引入了两个附加的参数 和 ,从而使分数阶P ID控制器参数的确定更加困难.在最简单的情况下,分数阶P I控制器和图1 PI 控制器模块图分数阶P I控制器也至少要有3个参数.为了进一步提高分数阶P ID 控制器对系统不确定性的适应能力,本文提出了一种基于神经网络的参数自调整分数阶P I控制器,系统结构如图1所示.在本文中,首先介绍分数算法的定义以及分数阶控制系统的概念.然后介绍所采用的离散化方法和分数阶P I控制器的具体设计过程.接下来提出了反传神经网络的架构及基于神经网络的分数阶P I控制器的参数自调整算法.并给出了相应的控制实验和结论.1 分数阶控制系统[2 6]1.1 分数算法在分数阶算法的定义中,有R ie m ann L iouv ille 定义和Caputo defi n iti o n 定义.在本文中所采用的是R ie m ann L i o uv ille 定义.R ie m ann L i o uv ille 对分数积分的定义是:aD-tf (t)=d f (t)[d (t-a )]=ta(t - ) -1( )f( )d ,t a (1)在这里,a Dt 是非整数 阶分数微分算子, 和t 是运算上下限, (x )是伽马函数.类似地,R ie m ann Liouv ille 对分数微分的定义是:aD-tf (t)=1 (m - )dmd t mtf ( )(t - )-m+1d,m -1 m (2)式中,m 为大于 的最小整数,d md tm 表示通常意义下的整数阶微分.应用Lap lace 转换定义,并且假设f (t)的拉普拉斯转换为F (s),则得到下面的表达式:L {0D -t f(t)}=s -F (s)(3)L {0D tf (t)}=sF (s)-m-1k=0s k [0D -k-1tf (t)]t=0(4)类似于整数阶微分算子,分数阶微分算子是一个线性操作:Dt ( f (t)+ g (t))= (0Dt )f (t)+ (0Dt )g (t)(5)1.2 分数阶控制系统在时域中,分数阶微分方程通常由下式给出:a n Dn t y (t)+ +a 1D1t y (t)+a 0D()t y (t)=b m Dm t u(t)+ +b 1D1t u (t)+b 0D t0u(t)(6)式中,微分阶次 i ,(i =0,1, ,n )和 j ,(j =0,1, ,m )可取任意的实数,且有 n > n-1> > 1> 0>0, m > m-1> > 1> 0>0.又在式中系数a i (i =0,1, ,n)和b j (j =0,1, ,m )可取任意的实数;并假设分数阶微分方程的初始条件[D i -i-1t y (t)]t==0,i =0,1, ,n -1且[D j-j-1t y (t)]t=0=0,j =0,1, ,m -1.对式(7)取Laplace 转换,便可得到分数阶传递函数表达式(7):G n (s)=Y(s)U(s)=b m sm + b 1s1+b 0s0a n s n + a 1s 1+a 0s(7)通常称由分数阶微分方程(类似于式(6))所描述的系统为分数阶(FOS )系统.并定义系统在零初始条件下,输出的Laplace 变换和输入的Lap lace 变换比为该分数阶系统的分数阶传递函数,式(8)就是第1期赵慧敏,等:基于神经网络的分数阶PI 控制器的设计与实现65一个例子.2 分数阶PI 控制器的设计从图1可以看出基于神经网络的参数自调整分数阶PI 控制器由两部分组成,一部分是控制器,另一部分是用于调整控制器参数的神经网络.在本部分中,将给出分数阶控制器的设计.下面是P I 控制器的传递函数表达式:G(s)=U(s)E(s)=K p+K is=G1(s)+G2(s)(8)从式(8)中,能够得到下面的表达式:U(s)=U1(s)+U2(s)=K p E(s)+K i s- E(s)(9)U1(s)=K p E(s)(10) U(z)时间域的离散化表达式如下:u1(k)=K p e(k)(11)u2(k)=K i15K[15e(k)+p1e(k-1)+p2e(k-2)+p3e(k-3)]+115[p1u(k-1)-p2u(k-2)+p3u(k-3)](12)u(k)=u1(k)+u2(k)(13)在这里p1=15 ,p2=6 2-9,p3= 3-4 ,K =2T .3 基于神经网络的参数自调整算法本文选择了BP神经网络4 5 3网络架构.输入层的输入是:O(1)j=x(j),j=1,2,3,4(14)X=(x1,x2,x3,x4)(15) 隐藏层的输入输出关系可以表示为:net(2)i(k)= 4j=1w(2)i j O(1)j(16)O(2)i(k)=f(n et(2)i(k)),i=1,2,3,4,5(17)类似地,输出层的输入-输出关系可以表示为:net(3)l(k)= 5i=1w(3)l i O(2)i(18)O(3)i(k)=g(net(3)l(k)),l=1,2,3(19)O=(O1,O2,O3)=(K p,K i, )(20)神经网络的三个输出,即K p,K i和 是控制器可以改变的三个参数,因为它们不能是负数g(x)=12(1+tan h(x))=e xe+e(21)被选择作为输出节点的活动函数.等式(22)作为用于修改权重的神经网络的学习索引函数.E(k)=12(rin(k)+yout(k))2(22)根据梯度递减优化法可以从等式(22)中提取控制参数K p,K i和 .依据式(23)可以得出用于修改66 大连交通大学学报第29卷权重的相应公式.w (3)l i (k )=-E (k )w (3)l i+w (3)l i (k -1)(23)在这里, 是学习比率, 是惯性系数.输出层的学习参数可以写为式(24) w (3)l i (k )= w (3)l i (k -1)+ (3)l O (2)i (k )(24)在这里(2)l=e(k )sgn y (k )u (k ) u (k ) O (3)l (k )g (net (3)l (k )),l =1,2,3(25)隐藏层的学习算子:w (2)i j (k )= w (2)i j (k -1)+ (2)iO (1)j (k )(26)(2)i=[1-f 2(net(2)i(k ))]3l=1(3)lw (3)l i (k ),i =1,2,3,4,5(27)4 例 子图2 扭力驱动系统分数阶PI参数自调整控制器在图2所示的扭力实验系统中已经得到验证,相应的系统参数是:负载侧轮数n =3、驱动侧轮数m =2、轴径d =12mm 、负载侧惯量J L =3 8674 10-3kg m 、驱动侧惯量J M =4 01558 10-3kg m 、转轴的弹性系数K s =1 9849 102N m /r 、最大驱动扭矩为3 84N m 、最高转速为3000r/m in .图3为此分数阶控制系统的框图.通过节点可以给实验系统加入额外的摩擦.图4显示的是当参数为K p =1.0,K i =0.28且 =0.1时,分数阶控制器P I在不同的摩擦条件下的时间响应.4(a)和4(b)分别为有附加摩擦和没有任何附加摩擦情况下的时间响应曲线.分数阶P I参数自调整控制器控制参数变化时的时间响应曲线见图5.图3 分数阶控制系统框图图4 角速度 M 响应曲线图5 控制参数变化曲线第1期赵慧敏,等:基于神经网络的分数阶PI 控制器的设计与实现67图6 带干扰输入的响应曲线为了更进一步检验控制器的自调整特性,通过增加摩擦和将角速度 M 减半两种方法来实现负载改变的目的.自调整的过程可以从图6中看出.5 结 语本文提出了基于神经网络的参数自调整分数阶P I控制器,详细地描述了控制器的设计方法和参数自调整的算法.实验结果表明,由于引入了神经网络的自学习特性,所设计的控制器不仅保持了常规分数阶P I控制器的特性,而且还具备了更好的适应性和参数自调节能力.如果有其他的方法能与它适当地结合,将可以获得更好的特性.参考文献:[1]李文.分数阶系统极点分布与时间响应[J].大连铁道学院学报,2006,27(3):44 48.[2]O LDHAM K B ,SPAN I ER J .T he F racti ona l Ca lcu l us[M ].N ew Y o rk :A cadem ic P ress ,1974.[3]M ILLER K S ,RO SS B .An Introducti on to t he F racti ona l Calcul us and F ractiona l D ifferential Equations[M ].N e w Y ork :W iley ,1993.[4]C HEN Y Q,M OORE K L.D iscretization sche m es for fractiona l o rder d iffe renti a t o rs and i ntegrators[J].IEEE T rans .C ircu itsSyste m s I Fund .T heory A pp.l ,2002,49(3):363 367.[5]E l SAY ED A M A,E l M ESIRY A E M,E l S AKA H A A.N u m er i ca l So l ution for M ulti ter m F racti ona l (A rbitrary)O rdersD ifferential Equations[J].Co m putationa l and A pp lied M athe m atics ,2004,23(1):33 54.[6]ADDA F B ,CRESSON J .F racti onal d ifferential equati ons and t he Schr di nger Equa ti on[J].A pp lied M a t he m atics and Co mpu tati on ,2005,161:323 345.。
分数阶系统的自适应PID控制器参数优化

分数阶系统的自适应PID控制器参数优化张艳珠;葛筝;王艳梅【摘要】随着分数阶微积分理论的深入研究,越来越多的复杂系统应用分数阶模型表征更加准确,然而将经典控制器方法应用于分数阶系统时,会出现收敛速度慢和超调量大等问题.针对分数阶系统研究分数阶控制器的参数优化问题.以绝对误差积分模型(ITAE)作为性能指标,引入遗传优化算法实现对分数阶PIλDμ控制器的参数优化,该改进算法通过自适应选择交叉概率和变异概率来优化分数阶PIλDμ控制器的多个参数的选择.仿真结果说明,分数阶PIλDμ控制器能够很好地解决分数阶系统应用经典控制器出现的问题,提高了系统的收敛速度,大大改善了系统的控制性能.【期刊名称】《沈阳理工大学学报》【年(卷),期】2015(034)002【总页数】7页(P6-11,22)【关键词】分数阶PIλDμ控制器;分数阶系统;参数优化;自适应遗传算法【作者】张艳珠;葛筝;王艳梅【作者单位】沈阳理工大学信息科学与工程学院,辽宁沈阳110159;沈阳理工大学信息科学与工程学院,辽宁沈阳110159;沈阳理工大学信息科学与工程学院,辽宁沈阳110159【正文语种】中文【中图分类】TP27近年来,分数阶PIλDμ控制器在控制工程领域得到更多的关注。
分数阶PIλDμ控制器最先由Podlubny教授提出的,引入了微分阶次μ和积分阶次λ,是整数阶PID控制器概念的推广[1-2]。
由于控制器多了两个可调参数,因此,控制参数的整定范围变得更大,能更加灵活地控制被控对象。
目前,众多学者针对经典PID控制器参数进行整定和优化,提出很多方法,如Z-N法、梯度法、Cohen-Coon整定法、单纯形法等。
但是在逐步研究的过程中发现这些方法有一定的缺陷,运算量大,容易陷入局部最优点等问题。
近年来,随着计算机技术的发展,一些智能算法被广泛引入参数的优化选择中,如粒子群算法、神经网络算法、蚁群算法、遗传算法等等。
文献[3]是基于混合PSO神经网络的自整定分数阶PIλDμ控制器的设计,其可适合不同的对象和过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基 于遗传 算 法 的分数 阶 P I 控 制器 参 数 整定 , 该
微 分 阶次 可 以取 任何 实 数 , 以分 数 阶 P 控 所 I
制 器 的控制 范 围扩展 可 以到分 数领 域 , 较传 统 P D I
算法 虽然 能通 过 随机搜 索 法找 到参 数 最优 值 , 但极
易 陷入局 部最 小 值 , 优 速 度 慢 ; 于免 疫 克 隆算 寻 基
进行仿 真 , 通过 仿 真 结果证 明 了该策略 的有 效性 , 同时通 过 比较说 明采 用分 数 阶 P I
关键词 : 分数阶 P I 控制器; 小波神经网络; 参数优化; A L B M TA
中图分 类 号 :M3 6 T 5
文献标 识 码 : A
文章 编号 :62 19 (0 10 — 09 0 17 — 08 21 )3 00 — 4
第3卷 1
第 3期
安徽 理工 大学学 报 ( 自然 科 学版 )
J r lf nu U i rtoSi c d eho g( a r c ne o n hi n e i f c nea cnl y Nt a Si c) u a oA v sy e nT o ul e
2 年 9月 0 1 1
t td o to efc ffa to a r e o su y c n r l fe to r ci n lo d r PI
c nr l r e in p i c p e o r cina r e o tol .d sg rn i l f fa to l o d r PI e
(c ol f l te n fr ai nier g n u U ie i f c neadT cnlg , annA h i 3 0 , hn ) Sho o e f a adI om t nE gnei ,A h i nvrt o i c n eh o y Huia n u 2 20 C i Ec l n o n sy Se o I a
K e r s:rcin lod rP y wo d fa t a re I o c nrl r o t l ;W aee n u a ew r oe v lt e rln t ok;P rmee pi zt n:MAT AB aa tro t ai mi o L
c ntol ri t o r l sbe— e
De i n o r cin lOr e I sg fF a t a d r P ^ o
C n r l rBa e n W a ee u a t r o t l s d o V ltNe r lNewo k oe
TA io—m n IN Xa i ,HU N u—ri U L —g o A G Yo u,Q i u
控 制 器参 数整 定 的方 法很 有 限 , 了研 究分数 阶 P 为 I
控 制 器的控 控 制 器
制 效果 , 小波神 经 网络 的基础 上提 出了分数 阶 P 在 I
比采 用传 统 PD控制 器能获得 更好 的控制 效果 。 I
控制 器的设计 原ntol r o rle
b s d o v l tn u a t r wa r p s d. S mu a in wa o u t d y u i g MATL a e n wa e e e r lnewo k spo o e i l to s c nd ce b sn AB. Va i i ft e ld t o h y t nig sr tg spr v d b he smu ain r s ls u n tae y wa o e y t i l to e u t .Th o to fe to r ci n lo d rPI e c n r lef c ffa t a r e o t rt a r d to lPI c nr l r e h n ta iina D o tol . e
Vo No 3 L 3l . Se 2 p. 011
基 于小 波 神 经 网络 的 分数 阶 PA I
田 小敏 , 友 锐 , 黄 曲立 国
( 安徽 理 工 大学 电气 与信 息 工 程 学 院 , 徽 安 淮南
控 制 器 的 设 计
2 20 ) 30 1
摘
要: 目前 分数 阶 P I
线性 环节 和时 变 环节 的缺 点 。 由于积 分 阶 次 A和
参 数整 定体 系 变 得 复杂 。 目前 已经 提 出 的 整定 方
法 有 : 于模 糊 控制理 论 的分数 阶 P 基 I 控 制器 的
参数 整 定 , 方 法虽然 可 以处理 模 糊 量但其 模糊 规 该 则库 的建立 主要 依 赖 于 专 家 经 验 , 自学 习能 力 差 ;
文 献 [ ] 出 了分 数 阶 P 1提 I
控制 性 能。分 数 阶 P I
控 制 器 理 论 并
的引 入将 控制 器 的研 究 范 围扩展 到 分数 领域 , 使得
通过 仿真 分析 了系统 的动态 响应 , 明 了其 良好 的 证 控 制 器 较 整 数 阶 PD控 I 制器 相 比 , 增加 了积 分 阶次 A和 微 分 阶 次 , 两 这 个 参 数克 服 了传 统 整 数 阶 P D控制 器 不 能 跟 踪 非 I