第18章 接触问题有限元分析技术
有限元 接触 有限滑移 小滑移
有限元接触有限滑移小滑移简介有限元方法是一种基于数值计算的工程分析方法,用于求解连续介质力学问题。
接触问题是指两个或多个物体之间存在接触并产生相互作用的情况。
在接触问题中,有时会出现滑移现象,即两个物体之间存在相对滑动。
而小滑移是指在接触问题中,滑动幅度相对较小的情况。
本文将详细介绍有限元方法在接触问题中的应用,以及如何考虑有限滑移和小滑移现象。
有限元方法在接触问题中的应用有限元方法通过将结构离散化为一个个小单元,利用单元间的节点连接关系建立整个结构的数学模型,并通过求解该模型得到结构的应力、位移等信息。
在接触问题中,可以使用有限元方法来模拟物体之间的接触行为。
常见的接触问题包括刚性-刚性接触和刚性-弹性接触。
刚性-刚性接触指两个刚体之间存在接触,并且不考虑变形;而刚性-弹性接触则考虑了至少一个物体的弹性变形。
在有限元方法中,接触问题可以通过引入接触算法来处理。
常用的接触算法包括节点投影法、增广拉格朗日法和无网格法等。
这些算法能够考虑接触面上的力、位移和形状等信息,并将其应用于有限元模型中进行求解。
有限滑移和小滑移现象在接触问题中,当两个物体之间存在相对滑动时,就产生了滑移现象。
有时候,滑动幅度很小,被称为小滑移。
小滑移是一种常见的现象,在许多工程领域都有应用。
有限滑移是指在有限元分析中考虑接触问题时引入的一种特殊技术。
通过引入摩擦系数和界面力来模拟物体之间的摩擦行为,并考虑相对位移导致的接触力变化。
在实际工程中,小滑移和有限滑移现象常常同时存在。
因此,在进行有限元分析时需要同时考虑这两种情况,并合理选择适当的模型和参数。
如何考虑有限滑移和小滑移现象要考虑有限滑移和小滑移现象,可以采取以下步骤:1.定义接触面和接触区域:首先需要确定物体之间的接触面和接触区域,在有限元模型中进行建模。
2.引入摩擦系数:根据实际情况,选择适当的摩擦系数来模拟物体之间的摩擦行为。
摩擦系数可以是常数,也可以是与位移或速度相关的函数。
第18章接触问题有限元分析技术
第18章接触问题的有限元分析技术第1节基本知识接触问题是一种高度非线性行为,需要较大的计算资源,为了进行准确而有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在求解问题之前,不知道接触区域,表面之间是接触或分开是未知的、突然变化的,这些随载荷、材料、边界条件和其它因素而定;其二,大多数的接触问题需要计算摩擦,有几种摩擦和模型可供挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一、接触问题分类接触问题分为两种基本类型:刚体─柔体的接触和半柔体─柔体的接触。
在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触;另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS支持三种接触方式:点─点、点─面和平面─面。
每种接触方式使用的接触单元适用于某类问题。
二、接触单元为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个节点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元。
有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元。
下面分类详述ANSYS使用的接触单元和使用它们的过程。
1.点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)。
如果两个面上的节点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
有限元分析中的接触和摩擦模拟(四)

有限元分析中的接触和摩擦模拟(四)10接触问题全局求解方案在有限元分析中,通常得到以下形式的全局方程组式中,P为结点载荷列阵。
对于接触问题,约束不等式一般可表示为如下形式10.1 罚函数法罚函数法不增加问题的自由度,而且使求解方程的系数矩阵保持正定,所以得到了广泛的应用。
罚函数法给出以下形式的求解方程:其算法流程可概述如下:10.2 拉氏乘子法拉氏乘子法是另外一种得到广泛应用的接触算法。
该方法能够精确满足接触约束条件,但增加了额外的未知量,即拉格朗日乘子。
拉氏乘子法给出的求解方程为以下给出拉氏乘子法的简要计算步骤:10.3 增广拉格朗日法增广拉格朗日法通过对于罚函数形势相组合的拉格朗日乘子的更新,获得了罚函数法和拉氏乘子法之间的折中方式。
该算法的求解方程形式为该方法通常与Uszawa类型的循环迭代相结合使用,采用嵌套两重循环,分别用于计算接触和更新拉氏乘子。
算法流程如下:增广拉格朗日法通过应用下面二式来更新拉氏乘子和罚参数10.4 连续二次规划法连续二次规划法采用牛顿型或者准牛顿型方法来求解接触问题的Kuhn-Tucher条件。
该方法中,将与接触问题等价的不等式约束最优化问题利用二次近似转化为一系列二次规划问题式中,(ū,ƛ)代表迭代求解过程的一个已知状态,即本次迭代开始时的位移和拉氏乘子的初始值,Δu是位移的增量。
连续二次规划法的基本流程如下:11摩擦的全局算法对于摩擦情况,需要区分粘接和滑动两种状态。
粘结状态相当于切向位移约束,摩擦力即界面上的约束反力。
与此相反,在滑动状态下,摩擦力需要根据界面上的切向滑移本构关系确定。
11.1 罚函数法罚函数法构建的摩擦接触问题的求解方程可表示如下,其中,t T(u)为摩擦力矢量。
在t n+1时刻,粘结或滑动状态的摩擦力由下式给出式中,a T为相对滑动速度的方向矢量。
根据以上列式,可以建立求解摩擦接触问题的算法。
对于总体求结果中的一个载荷增量步,罚函数法的算法流程可概括如下。
接触问题的有限元分析
有限元混合法:以结点位移和接触力为未知量,并 采用有限元形函数插值,将接触区域的位移约束条件和 接触力约束条件均反映到刚度矩阵中去,构成有限元混 合法控制方程
6.1 接触边界的有限元算法
机械分社
6.1 接触边界的有限元算法
机械分社
(2)接触约束算法 2) Lagrange 乘子法与增广Lagrange 乘子法
min U, λ 1 UT K UUT F g U T λ
2
代入
g
U
g0
U
g U U
U
g0
U
GU
K GT U F
G
0
λ
g0
U
Lagrange 乘子法中 接触约束条件可以精 确满足
惩罚函数法对接触约束条件的处理是通过在势能泛函中
增加一个惩罚势能。
p
U
1 2
P T
EP
P
惩罚因子
嵌入深度,是节点位移的函数
接触问题就等价于无约束优化问题:
min U U p U
K K U FF
p
p
6.1 接触边界的有限元算法
机械分社
(2)接触约束算法
1)罚函数方法
K K U FF
机械分社
(1)直接迭代法
在用有限元位移法求解接触问题时,首先假设初始 接触状态形成系统刚度矩阵,求得位移和接触力后,根 据接触条件不断修改接触状态,重新形成刚度矩阵求解, 反复迭代直至收敛。
每次迭代都要重新形成刚度矩阵,求解控制方程, 而实际上接触问题的非线性主要反映在接触边界上,因 此,通常采用静力凝聚技术,使得每次迭代只是对接触 点进行, 大大提高了求解效率。
弹塑性力学基础与有限元分析-接触分析实例
06
结论与展望
结论
1
本文通过理论分析和有限元模拟,深入研究了弹 塑性力学基础与有限元分析在接触分析中的应用。
2
研究结果表明,弹塑性力学基础与有限元分析在 接触分析中具有较高的精度和可靠性,能够有效 地模拟复杂接触问题。
3
本文所采用的有限元分析方法在处理接触问题时 具有较好的通用性和扩展性,为进一步研究复杂 接触问题提供了有力支持。
弹塑性本构模型
弹塑性本构模型的定义
弹塑性本构模型是描述弹塑性材料力学行为的数学模型,它通过应力应变关系来描述材料的弹塑性行 为。
常见的弹塑性本构模型
常见的弹塑性本构模型包括Mohr-Coulomb模型、Drucker-Prager模型、Cam-Clay模型等。这些模 型在描述材料的弹塑性行为方面各有特点,适用于不同的材料和工程问题。
接触面完全贴合,无相对运动。
滑动状态
接触面部分贴合,存在相对运动。
混合状态
接触面同时存在分离、粘结和滑动。
接触检测与跟踪
初始接触检测
确定初始状态下接触面的位置和状态。
接触状态跟踪
实时监测接触面的运动状态和相互作用。
接触面更新
根据接触状态调整接触面的几何形状和参数。
接触刚度与阻尼
1 2
接触刚度
描述接触面间的相互作用力与相对位移的关系。
求解阶段主要进行有限元 方程的求解,得到各节点 的位移和应力等结果。
ABCD
前处理阶段主要完成有限元 模型的建立和网格划分,为 求解阶段提供输入数据。
后处理阶段主要对求解结果进 行可视化、分析和评估,为工 程设计和优化提供依据。
04
接触分析原理
接触状态描述
分离状态
滚动轴承接触问题数值计算及有限元分析
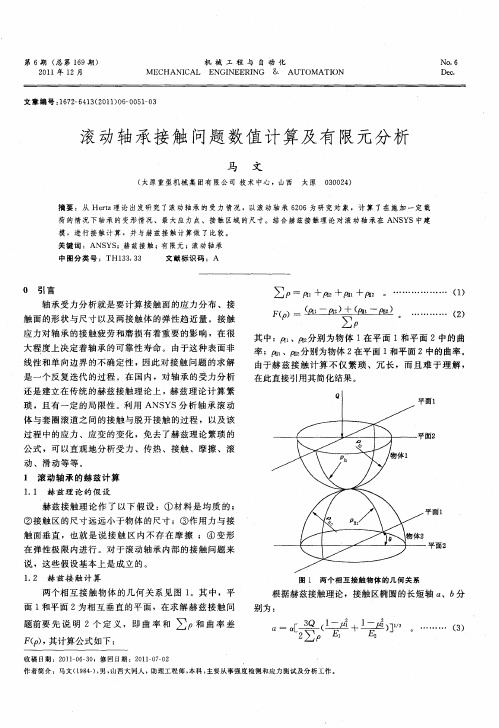
节点单 元 ,采 用 C wt4 o a 8单 元 进 行 分 析 ,有 限元 模 型如 图 2 示 。然后对 轴承进行 约束 ,在 Y方 向施加 所 了 ~0 0 5mm的位 移约束 ,并且施 加 载荷进 行 求解 。 . 0
图 3为模 型 的网格划 分 ,图 4为 Y方 向的应力 图 ,图 5为其等 效应力 图 。
M A e W n
( c n lg n e fTay a a yM a hneyGr u ., d. Tay a 0 2 Chn ) Te h oo yCe tro iu n He v c i r o p Co Lt , iu n03 0 4, ia
Ab ta t sr c :Th te so h o lr b a i g i r s a c e t h h o y o r z o u i g o h y e o o l g b a i g 6 0 .Th e s r s ft er l e rn s e e r h d wi t e t e r fHe t ,f c sn n t e t p f r l n e rn 2 6 e h i e d f rf t n o h ol g b a i g a d t eb g e ts r s o n n h ieo h o t c r a u d r t e c ra n l a r ac lt d eo r a i ft er l n e rn n h i g s te sp i ta d t e sz ft e c n a t a e n e h e t i o d a e c lu a e . o i W i r sc n a t h o y h s p p rb i st emo e f h o l g b a i g i t He t o t c e r ,t i a e u l h d l er i n e r ANS n a c l ts c n a tp o l ms h t d o t i n n YS a d c l u a e o t c r b e ,me n i , a wh l e
《有限元分析》课程教学大纲.doc
《有限元分析》课程教学大纲课程代码:0803731009课程名称:有限元分析英文名称:Finite Element Analysis总学时:32 讲课学时:12 实验学时:0 上机学时:20 课外学时:0学分:2适用对象:机械设计制造及其自动化专业(计算机辅助制造与数控加工专业方向)先修课程:工程制图、金属材料及加工、机械设计基础、工程力学。
一、课程性质、目的和任务有限元分析属于机械设计制造及其自动化专业(计算机辅助制造与数控加T专业方向)的专业任选课。
有限单元法是一种数值计算方法,在广泛的大型、复杂工程问题或领域屮,是一种分析设计和科学研究的有力工具。
例如固体力学、流体力学、地质力学、电磁学、传热学、建筑声学与噪音等问题或领域的分析研究屮,都可以利用有限元方法。
通过本课程学习使学生对有限单元法的基木原理及解决问题的基木步骤、应用要点,有一个基本认识和初步掌握,培养和提高解决T•程实际问题的基本技能,为应川有限元分析软件包解决实际工程问题奠定基础。
二、教学基本要求通过本课程的学习,学生应达到如下要求:1・了解有限元方法解决T程技术问题的基本方法;2.掌握有限元方法的基本原理、使用方法和解题步骤,并能够对轴对称零件、杆类零件、薄板弯曲等零件变形的进行具体的分析;3.了解热变形和热应力分析的方法和步骤。
三、教学内容及要求(一)绪论教学内容:介绍机械结构设计与有限元分析的关系,介绍有限元法的起源、早期的主要工作和基木思想,当前有限元软件的发展水平,川有限元法分析的一些T程问题的基木思路。
教学要求:在阐述有关基木理论的基础上,联系工程实际问题,了解有限元法研究的内容和方法,初步理解具在解决固体力学及结构分析方面的问题,而且应用于传热学、流体力学、电磁学等领域问题屮的重要地位。
(二)弹性力学的基础理论教学内容:介绍关于有限元方法的一些数学和力学基本知识,通过弹性力学变分原理建立弹性力学问题有限单元法的表达格式。
接触问题有限元分析方法综述
第21卷第3期水利水电科技进展2001年6月作者简介:孙林松(1968—),男,江苏姜堰人,博士研究生,从事结构分析与优化设计研究.接触问题有限元分析方法综述孙林松1,王德信1,谢能刚2(1.河海大学土木工程学院,江苏南京 210098;2.华东冶金学院机械工程系,安徽马鞍山 243000)摘要:从直接迭代法、接触约束法和数学规划法等方面综述接触问题有限元分析的基本方法.直接迭代法是一种“试验误差”方法,概念清楚,实施方便,但计算工作量较大,而且不能保证迭代一定收敛.接触约束法主要利用罚函数方法或Lagrange 乘子法将接触问题转化为无约束问题求解.数学规划法利用接触问题的互补条件、非穿透条件等,将其归结为二次规划(线性互补)问题求解,这是一种非迭代类解法,收敛平稳、迅速,计算工作量较小.文末简单介绍接触问题研究的一些新趋势.关键词:接触问题;有限元;迭代法;接触约束法;数学规划法中图分类号:O343.3 文献标识码:A 文章编号:1006Ο7647(2001)03Ο0018Ο03 接触问题广泛存在于机械工程、土木工程等领域,如齿轮的啮合、坝体的接缝等.这类问题的特点是具有单边约束和未知接触区域,接触区域的确定依赖于加载方式、荷载水平、接触面性质等因素,属于边界待定问题.接触问题的研究很早就引起了人们的重视.早在1882年,H.Herz 就比较系统地研究了弹性体的接触问题,并提出经典的Herz 接触理论.随着数值解法的兴起和发展,出现了许多求解接触问题的非经典方法,有限单元法作为解决复杂工程问题的最有效的数值方法,也成为求解接触问题的一种主要方法.以有限元为基础的接触问题数值解法,主要可分为直接迭代法、接触约束算法和数学规划法等.1 直接迭代法迭代法是解决非线性问题的常用方法,它在接触问题的研究中也首先得到了应用.在用有限元位移法求解接触问题时,首先假设初始接触状态形成系统刚度矩阵,求得位移和接触力后,根据接触条件不断修改接触状态,重新形成刚度矩阵求解,反复迭代直至收敛[1].在上述方法中,每次迭代都要重新形成刚度矩阵,求解控制方程,而实际上接触问题的非线性主要反映在接触边界上,因此,通常采用静力凝聚技术,使得每次迭代只是对接触点进行,大大提高了求解效率.另外,还有所谓虚力法[2],用沿边界的虚拟等效压力来模拟接触状态,这样在每次迭代中并不重新形成刚度矩阵,所做的只是回代工作.有限元混合法在弹性接触问题的求解中也得到较广泛的应用.它以结点位移和接触力为未知量,并采用有限元形函数插值,将接触区域的位移约束条件和接触力约束条件均反映到刚度矩阵中去,构成有限元混合法控制方程[3]K J Lu c=f(1)其中,K,u ,f 分别为通常有限元位移法中的刚度矩阵、未知结点位移向量和结点荷载向量;J ,L ,c 分别为接触力约束矩阵、位移约束矩阵和接触力向量.由于求解式(1)中非对称方程组将多耗机时、多占内存,不少学者在对称化算法上进行了研究[4].对弹塑性接触问题,在求解过程中接触非线性和材料非线性都需要迭代求解.通常是利用系统刚度矩阵的变化来反映材料非线性的影响,在每次塑性修正迭代过程中都要结合对接触状态的判断进行接触迭代计算.拟弹性叠加双重迭代法[5]模拟弹性叠加原理建立有限元方程,再利用内外循环迭代求出方程的近似解,在整个计算过程中不改变接触体刚度阵,仅增加平衡力修正项,在一定程度上提高了计算效率.在用迭代法求解接触问题,尤其是有摩擦接触问题时,为了保证收敛到正确的结果,荷载增量往往要受到一定的限制[6].对弹塑性接触问题,荷载增量更是受到不允许在一个增量步中出现两种非线性的限制[7].2 接触约束算法接触问题可描述为求区域内位移场U ,使得系统的势能Π(U )在接触边界条件的约束下达到最小,即min Π(U )=12U T KU -U TFs.t. g ≥0(2) 接触约束算法就是通过对接触边界约束条件的适当处理,将式(2)所示的约束优化问题转化为无约束优化问题求解.根据无约束优化方法的不同,主要可分为罚函数方法和Lagrange 乘子法等.2.1 罚函数方法罚函数方法实际上是将接触非线性问题转化为材料非线性问题.根据处理方法不同又可分为障碍函数法和惩罚函数法.障碍函数法假设接触面之间充满某虚拟物质,在未接触时其刚度趋于零,不影响物体的自由运动,在接触区域其刚度变得足够大,能阻止接触物体的相互嵌入.常用的间隙元等方法均属于此类,它们处理简单,编程方便,只是在通常的有限元分析中增加一种单元模式而已.惩罚函数法对接触约束条件的处理是通过在势能泛函中增加一个惩罚势能[8]Πp =12P T E p P(3)式中:E p 是惩罚因子;P 为嵌入深度,是结点位移U 的函数.这样,接触问题就等价于无约束优化问题min Π3(U )=Π(U )+Πp (U )(4)以位移U 为未知量,系统控制方程为(K +K p )U =F -F p(5)其中,K p =(5P U )T E p 5P U ,F p =(5P U)TE p P 0.罚函数方法不增加系统的求解规模,但由于人为假设了很大的罚因子,可能引起方程的病态.2.2 Lagrange 乘子法与增广Lagrange 乘子法Lagrange 乘子法通过引入乘子λ,定义接触势能Πc =g Tλ(6)将式(2)的约束最小化问题转化为无约束最小化问题min Π3(U ,λ)=12U T KU -U T F +g Tλ (7) 通常,可将g (U )对位移场U 作T aylor 展开,取其一次项有g (U )≈g 0+5g5UU =g 0+GU (8)将式(8)代入式(7)后,可得以位移场U 和Lagrange乘子λ为基本未知量的系统控制方程K G TGUλ= F-g 0(9) Lagrange 乘子法中接触约束条件可以精确满足,但由于Lagrange 乘子的引入,系统的求解规模增大了,而且在控制矩阵中出现了零主元,必须采取适当的方法以保证方程的顺利求解.由于罚函数方法和Lagrange 乘子法各有优缺点,人们自然就想到了两者的联合使用,从而形成了各种增广Lagrange 乘子法.其中,最直接的一种方法是构造修正的势能泛函Π3=Π+Πp +Πc (10)相应的控制方程为K +K pGTGUλ=F -F p -g 0(11) 考虑到Lagrange 乘子的物理意义,可将其用接触点对的接触应力代替,通过迭代计算得到问题的正确解[9].在迭代过程中,接触应力作为已知量出现,这样既吸收了罚函数方法和Lagrange 乘子法的优点,又不增加系统的求解规模,而且收敛速度也比较快.另一种增广Lagrange 乘子法主要是为了弥补Lagrange 乘子法中控制矩阵存在零主元的弱点,它在修正势能泛函式(7)中增加一惩罚项[10]:Πε=-12λT E -1P λ(12)即min Π3(U ,λ)=12U TKU -U T F +g Tλ-12λT E -1p λ(13)当罚因子E p →∞时,式(13)的解收敛于式(7)的解.经适当的运算后,可将系统的控制方程写为(K +G T E P G )U =F -G T Eg 0(14)3 数学规划法接触问题的数学规划法是基于势能或余能原理,利用变分不等式等现代数学方法导出的,理论上比较严格和直观.最初该方法是针对无摩擦接触问题提出的[11],它利用了无摩擦接触问题的非穿透条件和互补条件Δu n +δ3≥0, p n ≤0(15)p n (Δu n +δ3)=0(16)经有限元离散后,无摩擦接触问题被归结为二次规划(线性互补)问题求解.数学规划法解有摩擦接触问题的关键在于将摩擦条件表示成互补形式.一种方法是利用凸分析理论,把摩擦条件可以写成如下带导数的互补形式[12]w T = λ5φ5p Tφ≤0, λ≥0φ λ=0(17)・91・ 对摩擦条件的另一种处理方法是引进惩罚因子,然后仿照塑性力学将摩擦接触条件表示成有惩罚因子的互补形式p T=E T(u T-5g 5p Tλ)φ+ν=0νλ=0, ν≥0, λ≥0(18)式中:φ=p T+μp N,称为滑动函数;g是相应的滑动势函数;λ为滑动因子,E T是惩罚因子.有了上述摩擦接触条件的互补关系,就可以利用参变量变分原理[13]或虚功原理[14]建立摩擦接触问题的有限元二次规划(线性互补)模型.对这类线性互补问题常采用Lemke算法求解.对三维摩擦接触问题,为了能利用线性互补方法求解,通常以多面体棱锥近似代替C oulomb圆锥[15],从而实现滑动函数的线性化.但该方法大大增加了问题的求解规模.为了尽量减少线性化所增加的求解规模,有的学者又提出了参数二次规划迭代算法[16]、序列线性互补方法[17]等.然而,三维摩擦接触问题本质上属于非线性互补问题,由此出发可以建立非线性互补接触力法模型和非线性互补接触位移法模型[18].数学规划方法在弹塑性接触问题的应用,通常用迭代法反映材料非线性特征,在每次迭代中用数学规划方法求解接触问题[19].然而,钟万勰等[20]利用参变量变分原理将接触问题和弹塑性问题表示成具有相同形式的有限元参数二次规划问题,很方便地实现了弹塑性接触问题的数学规划解法.4 结 语经过众多学者的不懈努力,接触问题的研究借助于有限单元法这一有效的数值分析方法已经取得了很大的进展.然而随着研究的深入及新的数学理论的引进,仍然不断有新的方法涌现,如自适应有限元技术[21]、启发式算法[22]等.另一方面,在接触问题算法研究的同时,人们也注意到了对摩擦现象和接触面本构模型的研究,如文献[23]研究了三维正交异性摩擦接触模型,文献[24,25]则分别讨论了接触面的随机模型和微观滑动(micro2slip)本构模型.总之,接触问题的研究还远没有结束,它仍将是今后广大力学工作者和机械工程、土木工程领域学者的主要研究课题之一.参考文献:[1]Rahman M U,et al.An iterative procedure for finite2elementstress analysis of frictional contact problems[J].C om putS truct,1984,18:947~954.[2]Ayari M L,Saouma V E.S tatic and dynamic contact/im pactproblems using fictitious forces[J].Int J Numer Meth Engng, 1991,32:623~643.[3]Bathe K J,Chaudhary A.A s olution method for planar andaxisymmetric contact problems[J].Int J Numer Meth Engng, 1985,21:65~88.[4]Pascoe S K,M ottershead J E.T w o new finite element methodcontact alg orithms.C om put S truct,1989,32:137~144. [5]陈曼琪.用拟弹性叠加双重迭代法解弹塑性接触问题[J].固体力学学报,1983(3):365~374.[6]G arrido J A,F oces A,Paris F.An incremental procedure forthree2dimensional contact problems with friction[J].C om put S truct,1994(2):201~215.[7]张汝清,詹先义.非线性有限元分析[M].重庆:重庆大学出版社,1988.200~203.[8]Underhill W R L,D okainis M A,Oravas G E.A method forcontact problems using virtual elements[J].C om put Meth Appl Mech Engng,1997,143:229~247.[9]王水林,邓建辉,葛修润.改进的拉氏乘子法在接触摩擦问题中的应用[J].岩土工程学报,1998,20(5):64~67.[10]S im o J C,Wrigger P,T ay or R L.A perturbed Lagrangianformulation for the finite element s olution of contact problems [J].C om put Meth Appl Mech Engng,1985,50:163~180.[11]Haug D,Saxce G.Frictionless contact of elastic bodies byfinite element method and mathematical programming technique.C om put S truct,1980,11:55~67.[12]K larbring A.G eneral contact boundary conditions and theanalysis of frictional systems[J].Int J S olids S truct,1986, 22:1377~1398.[13]钟万勰.弹性接触问题的变分原理及参数二次规划求解[J].计算结构力学及其应用,1985,2(2):1~10. [14]朱昌铭.基于虚功原理的弹性接触问题的线性互补方法[J].力学学报,1995,27(2):189~197.[15]钟万勰,张洪武,吴承伟.参变量变分原理及其在工程中的应用[M].北京:科学出版社,1997.244~251. [16]Zhang H ong wu,Zhong Wanxie,G u Y uanxian.A combinedprogramming and iteration alg orithm for finite element analysis of contact problems[J].ACT A Mech S inica,1995,11:314~326.[17]吕和祥,马莉颖.三维接触问题的拟二维序列解法[J].固体力学学报,1996,17(1):31~37.[18]陈万吉,陈国庆.接触问题的互补变分原理与非线性互补模型[J].计算结构力学及其应用,1996,13(2):138~146.[19]Li M,Sha D,T amma K K.Linear com plementary formulationsinv olving frictional contact for elastoplastic deformable bodies [J].J Appl Mech,1997,64:80~89.[20]Zhong Wanxie,Sun Suming.A finite element method forelastoplastic structure and contact problem by parametric quadratic programming.Int J Numer Meth Engng,1998,26: 2723~2738.(下转第68页)定为不适合拱坝设计.澳大利亚1917年建成的高110m的塞沙那(Cathana)坝,该工程原先是按拱坝设计的,当平硐开挖后,发现基础不适合修筑拱坝.此时导流洞已完工,而CFRD底宽较窄,适合已建的导流洞,采用CFRD方案还可以抢回失去的时间.在塞沙那坝建成后,随后在塔斯马尼亚州修建的数座大坝也都采用了CFRD坝型.哥伦比亚1974年建成的高140m的安奇卡亚(Alto Anchicaya)坝,由于地基条件和预算费用的限制,拟建的混凝土重力坝变得不可行,且坝址位于雨林中,不适合修建粘土心墙堆石坝.尽管大坝的高度在当时是史无前例的,最后还是根据地基的适应性、工期和费用等条件,确定采用了CFRD.美国1979建成的高95m的贝利(R.D.Bailey)坝,美国陆军工程师团当时规划把这座坝设计成粘土心墙堆石坝.由于心墙材料匮乏,出于成本和环境的考虑而改为面板堆石坝.泰国1984年建成的高130m的考伦山(K hao Laem)坝,因多年来认为在夸伊内河的喀斯特坝址上建坝是不可行的,从技术和经济可行性角度看,CFRD是唯一可选的坝型.CFRD作为主要坝型取得重要进展的标志是1980年巴西建成的高160m的阿里亚(F oz do Areia)坝.该坝建在伊瓜苏河上的一个宽阔坝址处,是在一条主要河流上修建的第一座CFRD,为当时世界上最高的CFRD.尽管缺少一些先例,但基于成本最低和工期最短的考虑,仍选择了CFRD.1967年仅修建了6座碾压的CFRD,而到了1988年,已有70座CFRD.截至1988年,已克服了坝型选择障碍,CFRD已成为认可的主要坝型,并被纳入可行性研究.3 作为主要坝型的CFR D(1988~1999年)1971年澳大利亚建成的高110m的塞沙那坝变形很小,面板没有出现裂缝,取得了很大成功,由此奠定了现代CFRD的技术基础.20世纪80年代,混凝土面板堆石坝移向南美,20世纪90年代向巴西和中国发展.1999年10月,在巴西召开了一次关于CFRD坝型运行状况的研讨会.会上提交了36篇论文,与会代表们认为,CFRD发展很快的主要原因是充分利用当地筑坝材料,施工简单,工期短,费用低.摩洛哥A.阿拉米和A.E.什赖比撰写的论文叙述了对两种可行性研究方案的修改情况:20世纪70年代选择了ECRD,后来与ECRD或RCC(碾压混凝土)方案作了比较,表明选择CFRD更为经济和优越.在一坝址砾石覆盖厚度为30m,倾向采用设置混凝土防渗墙的CFRD,因为它是RCC方案费用的1/3.智利的圣胡安那(Santa Juana)CFRD在砾石层上设置混凝土槽板的先例已为许多坝址所采用.1988年至1999年期间,CFRD已纳入可行性研究中,并在修编初期的可行性研究中作为候选方案.4 1999年的CFR D截至1999年,CFRD是一种已成型的堆石坝.在很多或大多数可行性研究中,由于成本较低,施工期较短,选择CFRD多于ECRD.目前世界上最高的CFRD是墨西哥187m的阿瓜米尔帕(Aguomilpa)坝和中国178m的天生桥一级坝.拟建的此类高坝还有:哥伦比亚高190m的索加莫索(S ogam os o)坝、巴西210m的坎普斯诺沃斯(Cam pos N ov os)坝、尼泊尔220m的西塞蒂(West Seti)坝、菲律宾230m的阿格布鲁(Agbulu)坝等.CFRD的发展和目前的工程实践在许多文献资料中得到了很好的阐述.巴西的伊塔(Ita)坝是当前设计和施工实践的优秀典范.在伊塔坝,引入了一种改进型的混凝土路缘碾压机(concrete extrusion curb machine),可降低成本,加快堆石表面的铺筑以便混凝土面板的浇筑.本文经杨纪元教授级高级工程师校阅,在此表示感谢.参考文献:[1]C ooke J B.The CFRD1899-1999[J].Hydropower&Dams,1999,6(6):66~68.[2]C ooke J B.Development in high concrete face rock fill dams[J].Hydropower&Dams,1997,4(4):69~73.(收稿日期:2000Ο11Ο20 编辑:熊水斌)(上接第20页)[21]Wriggers P,Scher f O.Adaptive finite element techniques forfrictional contact problems inv olving large elastic strains[J].C om put Meth Appl Mech Engng,1998,151:593~603.[22]Refaat M H,Mequid S A.A new strategy for the s olution offrictional contact problems[J].Int J Numer Meth Engng, 1998,43:1053~1068.[23]Buczkowski R,K leiber M.E lastoplastic inter face m odel for3D2frictonal orthotropic contact problems[J].Int J Numer Meth Engng,1997,40:599~619.[24]Buczkowski R,K leiber M.A stochastic m odel of roughsur faces for finite element contact analysis[J].C om put Meth Appl Mech Engng,1999,169:43~59.[25]Sellgren U,Olofss on U.Application of a constitutive m odel formicro2slip in finite element analysis[J].C om put Meth Appl Mech Engng,1999,170:65~77.(收稿日期:1999Ο09Ο07 编辑:熊水斌)ADVANCES IN SCIENCE AN D V ol.21N o.3 TECHN OLOG Y OF WATER RESOURCES Jun120th2001T echnological I nnovations in Dushan F lood Control Project Design/ZH OU Jun2liang(Water Resources Bureau o f Jiangsu Province,Nanjing210025,China) Abstract:The Dushan Flood C ontrol Project,com posed of tw o sluices,one ship lock,one highway bridge and one levee crossing the lake,is located am ong the fam ous scenic spots near the T aihu Lake to the west suburbs of Wuxi City.The structure stretches into the Wuli Lake, and the macroscopic feature and lay out of it well match the natural scenery.The structure has already been a scenic spot there.In consideration of the above factors, the arc gates of submerged type are designed and adopted for the first time,and are hoisted in curved rails by electric cranes with synchronized electric axle in the inverse magnetic field.Since the project was put into operation in1991,it has been operating well.K ey w ords:flood control project;national style of regions of rivers and lakes;synchronized electric axle;arc gate; technological innovationA R eview of Construction Schedule for H ydropow er projects/W ANG Zhuo2fu,et al(College o f International Industry and Commerce,Hohai Univ.,Nanjing210098, China)Abstract:The current research on optimization and uncertainty of construction schedule for hydropower projects is reviewed in this paper.The research on risks and optimization of the construction netw ork program is of significance when the lasting time of the construction is uncertain.It is als o pointed out that postponing the beginning of projects as later as possible may help save project investments or costs if the risks of the construction progresses are known.K ey w ords:construction schedule;netw ork program; hydropower project;reviewA Summ ary of Finite E lement Analysis for Contact Problems/S UN Lin2s ong,et al(College o f Civil Engineering,Hohai Univ.,Nanjing210098,China) Abstract:C ontact problems are very comm on in engineering.The FE methods for contact problems,i.e. the iterative method,the contact constraint method,and the mathematical programming method are discussed.The iterative method is a“trial and error”method with a clear concept and convenient im plementation,but the am ount of com putation is large and convergence cannot be ensured.The contact constraint method can convert a contact problem to a unconstrained optimization problem by use of the penalty method of the Lagrange multiplier. The mathematical programming method s olves a contact problem as a quadratic programming(linear com plementarity)problem based on its com plementarity condition and non2penetration condition,and the method is a non2iterative method with rapid stable convergence and little am ount of com putation.Finally trends of the research on contact problems are introduced briefly.K ey w ords:contact problem;finite element;iterative method;contact constraint method;mathematical programming methodG lobal Estim ation of Weight Sensitivity and Its Application in H ydroelectric Objective Computation/ CHE N Shou2yu,et al(Dalian Univer sity o f Technology, Dalian116024,China)Abstract:Based on the multi2objective fuzzy optimal selection decision2making theory and m odel,the sensitivity of the m odel to weight variation is analyzed, and the trans fer equation of weight disturbance is presented.Then s ome inequalities for the estimation of weight disturbance are obtained,which reflect a global constraint relationship between the weight disturbance and the disturbance of relative optimal degree of decision2 making.The result provides a theoretical foundation for the estimation of the effect of objective weight variation of the system on decision making.K ey w ords:fuzzy optimal selection m odel;weight variant trans fer equation;weight variant inequality;calculation of hydroelectric powerTheory and Practice of Solving H ydrodynamics Equation with Monte2C arlo Method/CHE N D ong2yun, et al(K ey Lab o f Water and Sediment Sciences,Wuhan Univer sity,Wuhan430072,China)Abstract:The basic thinking about the M onte2Carlo Method and the principle for s olving P oiss on Equations are introduced.A random wandering m odel for the calculation of river netw orks is established by use of the M onte2Carlo Method and the graph theory,and the application of the m odel to large2scale river netw orks shows its g ood performance.By use of the M onte2Carlo Method calculation of large2scale matrixes can be av oided,thus, the calculation process is made sim ple and quick.K ey w ords:M onte2Carlo Method;random w ondering method;river netw ork;hydrodynamics and calculation・96・。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第18章接触问题的有限元分析技术第1节基本知识接触问题是一种高度非线性行为,需要较大的计算资源,为了进行准确而有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在求解问题之前,不知道接触区域,表面之间是接触或分开是未知的、突然变化的,这些随载荷、材料、边界条件和其它因素而定;其二,大多数的接触问题需要计算摩擦,有几种摩擦和模型可供挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一、接触问题分类接触问题分为两种基本类型:刚体─柔体的接触和半柔体─柔体的接触。
在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触;另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS支持三种接触方式:点─点、点─面和平面─面。
每种接触方式使用的接触单元适用于某类问题。
二、接触单元为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个节点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元。
有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元。
下面分类详述ANSYS使用的接触单元和使用它们的过程。
1.点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)。
如果两个面上的节点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
2.点─面接触单元点─面接触单元主要用于给点─面的接触行为建模,例如两根梁的相互接触。
如果通过一组节点来定义接触面,生成多个单元,那么可以通过点─面的接触单元来模拟面─面的接触问题,面即可以是刚性体也可以是柔性体,这类接触问题的一个典型例子是插头到插座里。
使用这类接触单元,不需要预先知道确切的接触位置,接触面之间也不需要保持一致的网格,并且允许有大的变形和大的相对滑动。
Contact48和Contact49都是点─面的接触单元,Contact26用来模拟柔性点─刚性面的接触,对有不连续的刚性面的问题,不推荐采用Contact26因为可能导致接触的丢失,在这种情况下,Contact48通过使用伪单元算法能提供较好的建模能力。
3.面─面的接触单元ANSYS支持刚体─柔体的面─面的接触单元,刚性面被当作“目标”面,分别用Targe169和Targe170来模拟2─D和3—D的“目标”面,柔性体的表面被当作“接触”面,用Conta171,Conta172,Conta173,Conta174来模拟。
一个目标单元和一个接单元叫作一个“接触对”程序通过一个共享的实常号来识别“接触对”,为了建立一个“接触对”给目标单元和接触单元指定相同的实常数号。
与点─面接触单元相比,面─面接触单元有如下优点:(1)支持低阶和高阶单元。
(2)支持有大滑动和摩擦的大变形。
(3)为工程分析提供更好的接触分析结果,例如法向压力和摩擦应力。
(4)没有刚体表面形状的限制,刚体表面的光滑性不是必须的,允许由自然的或网格离散引起的表面不连续。
(5)与点─面接触单元比,面─面接触需要较多的接触单元。
(6)允许多种建模控制,例如,绑定接触、渐变初始渗透、目标面自动移动到补始接触、平移接触面(老虎梁和单元的厚度)、支持死活单元等。
使用这些单元,能模拟直线(面)和曲线(面),通常用简单的几何形状例如圆、抛物线、球、圆锥、圆柱采模拟曲面,更复杂的刚体形状能使用特殊的前处理技巧来建模。
三、接触分析的步骤在涉及到两个边界的接触问题中,很自然把一个边界作为“目标”面,而把另一个作为“接触”面,对刚体─柔体的接触,“目标”面总是刚性的,“接触”面总是柔性面,这两个面合起来叫作“接触对”使用Targe169和Conta171或Conta172来定义2-D接触对,使用Targe170和Conta173或Conta174来定义3-D接触对,程序通过相同的实常数号来识别“接触对”。
执行一个典型的面─面接触分析的基本步骤如下:(1)建立模型,划分网格。
(2)识别接触对。
(3)定义刚性目标面。
(4)定义柔性接触面。
(5)设置单元关键点和实常数。
(6)定义/控制刚性目标面的运动。
(7)给定必须的边界条件。
(8)定义求解选项和载荷步。
(9)求解接触问题。
(10)查看结果。
第2节接触分析的有限元分析实例图18-1 装配模型示意图案例——接触问题的有限元分析问题如图18-1所示,为圆柱和套筒的装配示意图。
圆柱体半径为0.4米,长3米,套筒长为2米,内径为0.3米,宽和高均为1米,将圆柱装配到套筒孔内,且圆柱体端面距套筒两端面各为0.5米,套筒左端面固定。
分析圆柱插入套筒中的接触应力和圆柱体从套筒拔出过程中的应力、接触压力。
条件弹性模量为2.8×106 N/m2,泊松比为0.25,摩擦系数为0.2。
解题过程由于圆柱比套筒孔略大,因此它们之间会由于接触而产生应力和应变。
由于分析对象是对称的,可以取模型的四分之一进行分析。
1.准备工作(1)清空数据库并开始一个新的分析选取Utility>Menu>File>Clear & Start New,弹出Clears database and Start New对话框,单击OK按钮,弹出Verify对话框,单击OK按钮完成清空数据库。
(2)指定新的工作文件名指定工作文件名。
选取Utility>Menu> File>Change Jobname,弹出Change Jobname对话框,在Enter New Jobname项输入工作文件名,本例中输入的工作文件名为“contact”,单击OK按钮完成工作文件名的定义。
(3)指定新的标题指定分析标题。
选取Utility>Menu>File>Change Title,弹出Change Title对话框,在Enter New Title项输入标题名,本例中输入“contact problem”为标题名,然后单击OK按钮完成分析标题的定义。
2.定义单元类型运行主菜单Main Menu>Preprocessor>Element Type>Add/Edit/Delete命令,弹出Element Types对话框,单击Add按钮新建单元类型,弹出Library of Element Types对话框,先选择单元大类为Solid,接着选择Brick 8nod 185(Solid185),单击OK按钮,完成单元类型选择,单击Close按钮完成设置,如图18-2所示。
图18-2 定义单元类型3.定义材料属性运行主菜单Main Menu>Preprocessor>Material Props>Material Models命令,系统显示材料属性设置对话框,在材料属性对话框中依次选择Structure、Linear、Elastic、Isotropic,完成选择后,弹出材料属性输入对话框,分别输入弹性模量2.8e6,泊松比0.25,如图18-3所示,单击OK按钮完成材料属性输入并返回材料属性设置对话框。
完成材料属性设置后,单击对话框右上方“X”按钮离开材料属性设置。
图18-3 定义材料属性4.创建接触模型(1)创建六面体和圆柱指定选择菜单路径Main Menu>Preprocessor>Modeling> Create>V olumes>Block>By Dimensions,弹出Create Block by Dimensions对话框,输入X1=-0.5,Y1=-0.5,Z1=2,X2=0.5,Y2=0.5,Z2=4,如图18-4所示。
指定选择菜单路径Main Menu>Preprocessor>Modeling>Create>Volumes>Cylinder>By Dimensions,弹出Create Cylinder by Dimensions对话框,输入RAD1=0.15,Z1=2,Z2=4,其它输入框默认,如图18-5所示。
等轴侧显示图形。
图18-4 创建Block实体图18-5 创建Cylinder实体(2)布尔减操作运行主菜单Main Menu>Preprocessor>Modeling>Operate>Booleans> Subtract>Volumes命令,在弹出的拾取对话框中先拾取全部,单击OK按钮,再拾取圆柱体(或输入体的编号2),单击OK按钮完成布尔减操作。
(3)创建圆柱实体指定选择菜单路径Main Menu>Preprocessor>Modeling> Create>V olumes>Cylinder>By Dimensions,弹出Create Cylinder by Dimensions对话框如图18-5所示,输入RAD1=0.2,Z1=1.5,Z2=4.5,其它输入框默认。
(4)设置工作平面执行菜单Utility Menu>WorkPlane>Offset WP by Increment弹出Offset WP菜单,在“XY,YZ,ZX Angles”项输入0,-90,0,单击OK按钮完成工作平面设置。
(5)体分解操作指定选择菜单路径Main Menu>Preprocessor>Modeling>Operate> Booleans>Divide>V olu by Workplane,弹出拾取对话框,按Pick All按钮完成体分解。
(6)删除体操作指定选择菜单路径Main Menu>Preprocessor>Modeling>Delete> V olumes and Below,弹出拾取对话框,在图形中拾取图形上部的套筒和圆柱(或输入体号2,6),单击OK按钮完成删除操作,如图18-6所示。
图18-6 第一次体分解结果(7)设置工作平面执行菜单Utility Menu>WorkPlane>Offset WP by Increment弹出Offset WP菜单,在“XY,YZ,ZX Angles”项输入0,0,-90,单击OK按钮完成工作平面设置。