第五章 接触问题的有限元法
有限元 接触 有限滑移 小滑移
有限元接触有限滑移小滑移简介有限元方法是一种基于数值计算的工程分析方法,用于求解连续介质力学问题。
接触问题是指两个或多个物体之间存在接触并产生相互作用的情况。
在接触问题中,有时会出现滑移现象,即两个物体之间存在相对滑动。
而小滑移是指在接触问题中,滑动幅度相对较小的情况。
本文将详细介绍有限元方法在接触问题中的应用,以及如何考虑有限滑移和小滑移现象。
有限元方法在接触问题中的应用有限元方法通过将结构离散化为一个个小单元,利用单元间的节点连接关系建立整个结构的数学模型,并通过求解该模型得到结构的应力、位移等信息。
在接触问题中,可以使用有限元方法来模拟物体之间的接触行为。
常见的接触问题包括刚性-刚性接触和刚性-弹性接触。
刚性-刚性接触指两个刚体之间存在接触,并且不考虑变形;而刚性-弹性接触则考虑了至少一个物体的弹性变形。
在有限元方法中,接触问题可以通过引入接触算法来处理。
常用的接触算法包括节点投影法、增广拉格朗日法和无网格法等。
这些算法能够考虑接触面上的力、位移和形状等信息,并将其应用于有限元模型中进行求解。
有限滑移和小滑移现象在接触问题中,当两个物体之间存在相对滑动时,就产生了滑移现象。
有时候,滑动幅度很小,被称为小滑移。
小滑移是一种常见的现象,在许多工程领域都有应用。
有限滑移是指在有限元分析中考虑接触问题时引入的一种特殊技术。
通过引入摩擦系数和界面力来模拟物体之间的摩擦行为,并考虑相对位移导致的接触力变化。
在实际工程中,小滑移和有限滑移现象常常同时存在。
因此,在进行有限元分析时需要同时考虑这两种情况,并合理选择适当的模型和参数。
如何考虑有限滑移和小滑移现象要考虑有限滑移和小滑移现象,可以采取以下步骤:1.定义接触面和接触区域:首先需要确定物体之间的接触面和接触区域,在有限元模型中进行建模。
2.引入摩擦系数:根据实际情况,选择适当的摩擦系数来模拟物体之间的摩擦行为。
摩擦系数可以是常数,也可以是与位移或速度相关的函数。
有限元法介绍

通俗地说,有限元法就是一种计算机模拟技术,使人们能够在计算机上用软件模拟一个工程问题的发生过程而无需把东西真的做出来。
这项技术带来的好处就是,在图纸设计阶段就能够让人们在计算机上观察到设计出的产品将来在使用中可能会出现什么问题,不用把样机做出来在实验中检验会出现什么问题,可以有效降低产品开发的成本,缩短产品设计的周期。
有限元法也叫有限单元法(finite element m ethod, FEM),是随着电子计算机的发展而迅速发展起来的一种弹性力学问题的数值求解方法。
五十年代初,它首先应用于连续体力学领域—飞机结构静、动态特性分析中,用以求得结构的变形、应力、固有频率以及振型。
由于这种方法的有效性,有限单元法的应用已从线性问题扩展到非线性问题,分析的对象从弹性材料扩展到塑性、粘弹性、粘塑性和复合材料,从连续体扩展到非连续体。
有限元法最初的思想是把一个大的结构划分为有限个称为单元的小区域,在每一个小区域里,假定结构的变形和应力都是简单的,小区域内的变形和应力都容易通过计算机求解出来,进而可以获得整个结构的变形和应力。
事实上,当划分的区域足够小,每个区域内的变形和应力总是趋于简单,计算的结果也就越接近真实情况。
理论上可以证明,当单元数目足够多时,有限单元解将收敛于问题的精确解,但是计算量相应增大。
为此,实际工作中总是要在计算量和计算精度之间找到一个平衡点。
有限元法中的相邻的小区域通过边界上的结点联接起来,可以用一个简单的插值函数描述每个小区域内的变形和应力,求解过程只需要计算出结点处的应力或者变形,非结点处的应力或者变形是通过函数插值获得的,换句话说,有限元法并不求解区域内任意一点的变形或者应力。
大多数有限元程序都是以结点位移作为基本变量,求出结点位移后再计算单元内的应力,这种方法称为位移法。
有限元法本质上是一种微分方程的数值求解方法,认识到这一点以后,从70年代开始,有限元法的应用领域逐渐从固体力学领域扩展到其它需要求解微分方程的领域,如流体力学、传热学、电磁学、声学等。
计算固体计算力学-内容简介

第四章 几何非线性问题及其有限元求解
01
大变形条件下的应力和
应变的度量
02
几何非线性问题的表达
格式
03
大位移非线性弹性理论
的变分原理
04
几何非线性问题的有限
05
结构稳定性和屈曲问题
元分析
授课内容简介
第五章 接触和碰撞问题及其有限元求解 接触问题的界面条件 接触问题的求解方案 接触问题的有限元方程 接触问题的有限元求解 接触分析中的若干问题
授课内容简介
1
第二章 非线性方程(组) 的解法
2
直接迭代法
○ Newton-Raphson法(简 称N-R法)
○ 改进的NewtonRaphson法(简称M-N-R 法)
○ 增量法
授课内容简介
第三章 材料非线性问题及其有限元求解
01
材料弹塑性本 构关系
03
弹塑性增量有 限元分析
02
塑性力学中的 变分原理
目录
01
博士研究生课程
02
计算固体力学
03
课程编号:017090
04
王生楠,谢伟
05
西北工业大学 航空学院
计算固体力学课程体系
授课内容简介
第二章 非线性方程 (组)的常用解法
第四章 几何非线性 问题及其有限元求解
01
第一章 引言
02
03
第三章 材料非线性 问题及其有限元求解
04
05
第五章 接触和碰撞 问题及其有限元求解
参考书籍
01
有限元法中的变 分原理基础,王 生楠编,西工大 出版社
02
航天器计算结构 力学,竺润祥主 编,宇航出版社
有限元法概述

(2)MSC/NASTRAN。 MSC/NASTRAN是在原NAST RAN基础上进行大量改进后的系统软件,主要包括MS C.Patran并行框架式有限元前后处理及分析系统、 MS C.GS-Mesher快速有限元网格、 MSC.MARC非线性有 限元软件等。其中MSC.MARC具有较强的结构分析能
.
5.在产品制造或工程施工前预先发现潜在的问题; 6. 模拟各种试验方案,减少试验时间和经费; 7. 进行机械事故分析,查找事故原因。
轴承强度分析
.
汽车碰撞实验
.
刹车制动时地盘的应力分析
.
钢板精轧机热轧制分析
.
三维椭圆封头开孔补强
.
水轮机叶轮的受力分析模拟
.
人体股骨端受力分析
.
半导体芯片温度场的数值仿真
知量时称为混合法。 位移法易于实现计算自动化,所以,在有限单元法
中位移法应用范围最广。
.
2、有限元法的发展
有限单元法基本思想的提出,可以追溯到Courantl在1 943年的工作,他第一次尝试应用定义在三角形区域上的 分片连续函数和最小位能原理相结合,来求解St·Venant 扭转问题。相继一些应用数学家、物理学家和工程师由于 各种原因都涉足过有限单元的概念。
.
4、有限元的特点
(1) 概念清楚,容易理解。可以在不同的专业背景和水平 上建立起对该方法的理解。从使用的观点来讲,每个人的 理论基础不同,理解的深度也可以不同,既可以通过直观的 物理意义来学习,也可以从严格的力学概念和数学概念推 导。
接触问题的有限元分析
有限元混合法:以结点位移和接触力为未知量,并 采用有限元形函数插值,将接触区域的位移约束条件和 接触力约束条件均反映到刚度矩阵中去,构成有限元混 合法控制方程
6.1 接触边界的有限元算法
机械分社
6.1 接触边界的有限元算法
机械分社
(2)接触约束算法 2) Lagrange 乘子法与增广Lagrange 乘子法
min U, λ 1 UT K UUT F g U T λ
2
代入
g
U
g0
U
g U U
U
g0
U
GU
K GT U F
G
0
λ
g0
U
Lagrange 乘子法中 接触约束条件可以精 确满足
惩罚函数法对接触约束条件的处理是通过在势能泛函中
增加一个惩罚势能。
p
U
1 2
P T
EP
P
惩罚因子
嵌入深度,是节点位移的函数
接触问题就等价于无约束优化问题:
min U U p U
K K U FF
p
p
6.1 接触边界的有限元算法
机械分社
(2)接触约束算法
1)罚函数方法
K K U FF
机械分社
(1)直接迭代法
在用有限元位移法求解接触问题时,首先假设初始 接触状态形成系统刚度矩阵,求得位移和接触力后,根 据接触条件不断修改接触状态,重新形成刚度矩阵求解, 反复迭代直至收敛。
每次迭代都要重新形成刚度矩阵,求解控制方程, 而实际上接触问题的非线性主要反映在接触边界上,因 此,通常采用静力凝聚技术,使得每次迭代只是对接触 点进行, 大大提高了求解效率。
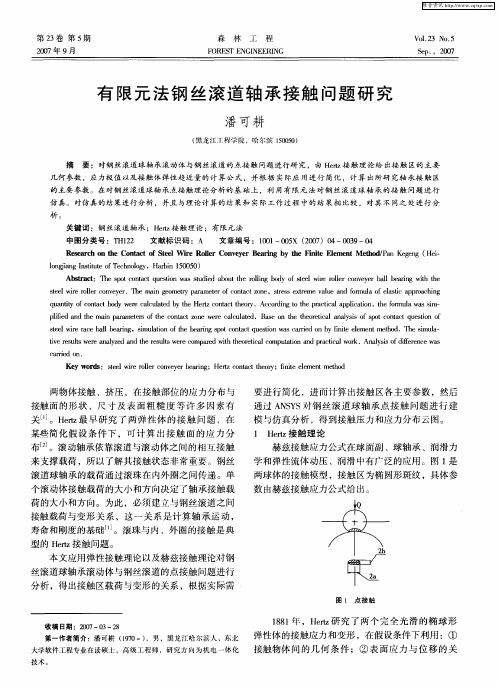
有限元法钢丝滚道轴承接触问题研究
摘
要 :对 钢 丝 滚 道球 轴 承 滚 动 体 与 钢 丝 滚 道 的 点 接 触 问题 进 行 研 究 , 由 H r 接 触 理 论 给 出接 触 区 的 主 要 et z
几何参数 ,应 力极值 以及接触体 弹性趋近 量的计 算公 式 ,并根据 实际应 用进行 简化 ,计算 出所研 究轴承接 触 区 的主要 参数 。在 对钢 丝滚道球轴承 点接 触理论 分析 的基础 上 ,利用有 限元 法对钢 丝滚道球 轴承 的接 触 问题进 行
u n i fc na t d ee c c td b r o t t h oy.A c r ig t e p a t a p l ain h r ua W i q a t y o o tc o y w r a uae y te Het c n c e r t b ll h z a t c o dn t rcil a pi t .t efm l a s oh c c o o s m— pi e d te man p rmeeso e c n c z n ee c c ae .B e o h h oeia a sso p tc na tq e t n o l d a i aa tr ft o t t e w r a u td i f n h h a o ll s a n te te rt l a l i fs o tc u si f c n y o o
要进 行 简化 ,进 而计算 出接 触 区各 主要参数 ,然 后
通过 A S S对 钢 丝 滚 道 球 轴 承 点接 触 问题 进 行 建 NY
模与仿 真 分析 ,得 到接触 压 力和应 力分 布云 图 。
l gagI tu f eho g,H ri 10 5 ) o j n steo cnl y a n 50 0 n i n it T o b
接触问题求解方法【刘怀举的博客】
接触问题求解方法(2010-10-02 00:25:00)转载▼标签:杂谈不管在接触边界之间是否有间隙存在,接触作用的出现对结构受载荷之后的接触状态和应力分布都有直接的影响,有些结构正是由于接触作用,使不连续的部分共同工作,从而提高了整个结构的承载力和刚度;而正是由于接触的存在使得有些结构出现局部高应力,很容易使材料屈服或发生裂缝,如果再受到循环荷载的影响,还可能产生疲劳失效。
因此对于接触问题的研究具有重要的工程实际意义。
赫兹接触理论及后来其它学者发展的弹性接触理论称为经典接触力学,它们都是通过封闭的解析解来解决接触问题的,但其应用范围有限,因而接触力学的进展主要与消除这些限制有关。
接触问题属于数学上的混合边值问题,Boussinesq积分方程是其主导方程。
按所用数学方法的不同,可将接触问题的理论解法大致分为经典解法和非经典解法。
以经典的数学工具如积分变换法和复变函数法求解接触问题的方法称为经典解法,以有限元法、边界元法等求解接触问题的方法称为非经典法。
以传统有限元法等数值方法为基础的非经典解法主要有罚函数法、拉格朗日乘子法、增广拉格朗日乘子法、摄动拉格朗日乘子法及数学规划法。
Trefftz有限元模型利用辅助网线位移场或面力场,在一种杂交意义上将单元域内位移场关联起来。
单元域内位移场精确满足控制微分方程,它可表达为微分方程的特解、适当截断的Trefftz完备解系与待定参数乘积的和的形式。
利用定义在每个单元边界上的独立的网线位移场,单元间的连续性就在一种近似意义上得到满足。
在单元一级上消去内部待定参数后即可得到标准的力-位移关系式(即单元刚度方程)。
变分泛函是Trefftz有限元法的核心,它在单元公式推导中起着至关重要的作用。
由于Trefftz有限元法继承了传统有限元法和传统边界元法的优点:(1)公式中只含有对单元的边界积分,这样就可以生成任意多边形单元甚至曲边单元。
因此,Trefftz有限元法可被认为是一种特殊形式的边界型求解方法,单元的边界类似于一种特殊形式的边界单元,其刚度矩阵对称、计算简单,而不像传统边界元那样要进行复杂的计算(如计算边界奇异积分的复杂积分规则,处理非齐次方程的特殊积分,处理间断问题的双节点技术等等)。
接触问题分析
引入单边约束条件
线性互补问题
目前,接触问题分析的方法主要还是经典方法,即从各种变 分原理出发,将几何约束和摩擦定律引入泛函,最终获得接触问 题的控制方程。这是由于大型工程结构分析,大多都采用有限元 方法,而经典方法仍然在此框架之内。本章则侧重介绍接触问题 的数学规划解法,主要从可研究的角度考虑。
2018/11/11 5
4)混合(假定x 方向滑动)
Fal Fbl l x, y, z Fax Fax Faz Faz qay qby 0 q q r az bz z
引言(1/5)
接触现象是普遍存在的。实际的工程结构系统往往分成几个非永久性 连在一起的部分,这些部分之间的力靠它们之间的挤压、甚至冲 击来传递。 接触实例:齿轮的齿间啮合;汽(气)轮机及发动机中叶片 与轮盘的榫接;两物体的撞击(动态接触)。 研究现状:简单的弹性接触问题在19世纪末Hertz就已经开始研究, 但只有在有限元方法及计算机出现以后,接触问题的研究才有 了长足发展,并达到实用化程度。 接触问题的特点:属边界非线性问题,边界条件不再是定解条件,而 是待求结果;两接触体间接触面积与压力随外载的变化而变,并 与接触体的刚性有关。这是该问题的特点,也是困难所在。
对以上四方面内容,不少学者进行了研究,提出了不同的理论与 方法,对同一问题,各种理论各有优缺点,尚未达到共识。基于接触 问题的难度、研究的不成熟、加之其实用性,它一直是固体力学研究 的热点。
2018/11/11 2
研究内容浅析:
引言(3/5)
接触模式问题:解决接触面上接触力的传递问题。 点-点(node-to-node)接触模式:将两接触体的接触面分成同样 的网格,使结点组成一一对应的结点对,假定接触力的传递 通过结点对实现,接触面上各局部区域的接触状态也相应地 按结点对来判断。优点-直观、简单、易于编程。缺点-对 于复杂接触面情形,网格结点一一对应不易做到。 点-面(node-to-surface)接触模式:先将两接触体人为地分为主 动体(master body)与被动体(slave body),并假定主动 体网格中的一个结点可与被动体表面上的任意一点(不一定 是网格结点)相接触。优点-两接触体可根据自身情况剖分 网格。缺点-方法较复杂、编程难度大。
滚动轴承接触问题的有限元分析
滚动轴承接触问题的有限元分析马士垚张进国(哈尔滨工业大学(威海)机械工程系,威海264209)Contact analysis on rolling bearing by finite element methodMA Shi-yao ,ZHANG Jin-guo(Department of Mechanical Engineering ,Harbin Institute of Technology ,Weihai 264209,China )文章编号:1001-3997(2010)09-0008-02【摘要】基于ANSYS 有限元分析软件,建立了滚动轴承接触分析的三维有限元模型,分析得到了轴承滚动体的径向位移、滚动体与内外圈的接触应力云图,并将接触应力结果与Hertz 理论计算的结果对比,计算两者的接近度,进而说明该法分析的可行性,也为轴承的进一步研究提供了理论基础。
关键词:ANSYS ;滚动轴承;有限元;接触分析【Abstract 】A three-dimensional model is first established for rolling bearing based on an FEA soft -ware as ANSYS .The bearing ’s radial displacement 、the contact stress between rolling elements and inner and outer ring is pared the contact stress results of ANSYS with the Hertz results ,see the difference between each other ,so that the feasibility of this method is proved ,also provides theoretical principle for further research.Key words :ANSYS ;Rolling bearing ;Finite element ;Contact analysis中图分类号:TH133.33文献标识码:A*来稿日期:2009-11-131前言轴承是机械传动部分中的重要组成部分,在对轴承的设计与分析中,经常要计算轴承的承载能力、寿命、变形等问题,由于传统的赫兹接触理论在实际应用中存在局限性,只能得到轴承接触应力的近似解,而且求解方法繁琐,利用有限元分析软件ANSYS 对轴承进行接触问题的分析,可以解决所有的赫兹接触问题,方法简洁,易于程式化,结果可视性强,对轴承的分析有一定的指导作用。
有限元法PPT课件
Motorola– Drop Test Fujitsu-Computers Intel –Chip Integrity
电子
Baxter - Equipment J&J – Stents Medtronic - Pacemakers
医疗
Principia-spain Arup-U.K. T.Y. Lin - Bridge
有限元法
左图所示,为分析齿轮上一个齿内的应力分布,可分析图中所示的一个平面截面内位移分布.作为近似解,可以先求出图中各三角形顶点的位移.这里的 三角形就是单元,其顶点就是节点。
从物理角度理解, 可把一个连续的齿形截面单元之间在节点处以铰链相链接,由单元组合而成的结构近似代替原连续结构,在一定的约束条件下,在给定的载荷作用下,就可以求出各节点的位移,进而求出应力.
一.Abaqus公司简介
公司
’00 ’01 ’02 ’03 ’04 ‘05 ’06 ‘07
18%
18%
20%
SIMULIA公司(原ABAQUS公司)成立于1978年,全球超过600名员工,100% 专注于有限元分析领域。 全球28个办事处和9个代表处 业务迅速稳定增长,是当前有限元软件行业中唯一保持两位数增长率的公司。 2005年5月ABAQUS加入DS集团,将共同成为全球PLM的领导者
Where :
Displacement interpolation functions (位移插值函数)
13.3 Approximating Functions for Two-Dimensional Linear Triangular Elements (二维线性三角形单元的近似函数)
node (节点)
element(单元)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(5-24) (5-25)
(5-26)
(5-27)
可得:
(5-28)
5.3 接触问题的罚函数法
5.3.1 接触问题的弱形式
(5-29)
(5-30)
其中:
(5-30)
(5-30)
(5-31)
式中:
(5-32) (5-33)
(5-34)
(5-35)
(5-36)
(5-37)
(5-38)
(5-39)
2、接触后搜寻
5.5.3 网格划分
5.5.4 摩擦模型的规则化
(5-83)
(5-84)
(5-85) 式中
(5-86)
(5-87)
(5-88)
(5-89) 式中
(5-90) (5-91)
(5-91) 式中
(5-92)
(5-93) (5-94)
(5-95) 式中
5.5 接触分析中的几个问题
5.5.1 单元形式
5.5.2 接触点对的搜寻
1、接触前搜寻
第五章 接触问题的有限元法
5.1 接触问题有限元法的基本概念
5.1.1 接触表面非线性
5.1.2 接触面条件
(5-1) (5-2) (5-3)
图5.1 接触物体及坐标
(5-4)
(5-5) (5-6) (5-7)
(5-8)
(5-9)
(5-10)
(5-11) (5-12) (5-14) (5-15)
(5-16)
(5-17)
(5-18)
(5-19)
(5-20) (5-21)
(5-21)
(5-22)
(5-23)
(5-24) (5-25)
(5-26)
(5-27)
5.1.3 接触状态的判定
5.2 接触问题求解的一般过程
5.2.1 接触问题求解的一般过程
5.2.2 无摩擦弹性接触问题求解的一般有限元解法
图5-4
(5-70)
5.4.2 哥德曼(Goodman)单元
图 5-5
(5-71)
(5-72a)
(5-72a)
(5-73)
(5-74)
(5-75)
(5-76)
5.4.3 薄层四边形单元
(5-78)
5.4.4 接触摩擦单元
运用虚位移原理
(5-79)
(5-80)
(5-81)
且
(5-82)
(5-40)
(5-41)
其中:
(5-42)
Hale Waihona Puke (5-43) (5-44)
(5-45)
(5-46)
(5-47)
(5-48)
5.3.2 罚函数法的有限元方程
(5-49) (5-50)
(5-51)
(5-52)
(5-53)
在局部坐标系下,一个接触点对的接触力引起的等效节点力向量, 为
(5-54)
(5-55) (5-56)
(5-57) (5-58)
(5-59) (5-60)
(5-61)
(5-62)
(5-63)
(5-64)
(5-65)
(5-66) (5-67)
(5-68) (5-69)
5.4 接触单元
应用有限元法分析接触问题,有一种直接的方式是在接触 面上建立一种特殊形式的单元,通常把这种单元称为接触单元 5.4.1 两节点单元