激光陀螺仪误差分析与补偿技术
光纤陀螺在摇摆状态下的误差建模与补偿

2 0 1 3年 5月
光 电工程
Op t o — El e c t r o ni c Eng i n e e r i n g
V_ 0 I . 4 0. N O. 5 Ma y , 201 3
文章 编号 :1 0 0 3 — 5 0 1 X ( 2 0 1 3 ) 0 5 — 0 0 5 8 —补偿
高 鑫 , 一 ,严 吉 中 ,谢 良平 1 , 2 ,王京献 , 2
( 1 .西 安 飞 行 自动 控 制研 究 所 ,西 安 7 1 0 0 6 5 ; 2 .中航 捷 锐 ( t k 京) 光 电技 术 有 限 公 司 ,北 京 1 0 1 5 0 0 )
摘要 :光纤 陀螺在摇摆运动条件 下存 在不可忽略的角速率测量误差 ,该项误差制约 了光纤 陀螺捷 联 系统在 恶劣角 动 态应用环境下的精度 。针对这种情况,基于 自动控制理论和光 纤陀螺 闭环控制方案 ,分析 了闭环光纤陀螺摇摆 误 差的产生机理 ,指 出角加速度是导致摇摆误差的主要 因素。随后 建立 了光纤陀螺摇摆误差 的简化模型 ,并提 出 了摇摆误 差补偿 算法。最后采用基 于等效输入原理的动态特性测试方法,在 不同的摇摆频率 下对光纤 陀螺进行 了
c o mp e n s a t e F OG’ S s wa y i n g e ro r u n d e r d i f e r e n t s wa y i n g f r e q u e n c i e s . T e s t r e s u l t s s h o w t h a t t h e c o mp e n s a t i o n a l g o r i t h m
(1 . Fl i g h t Au t o ma t i c Co n t r o l Re s e a r c hI n s t i t u t e , Xi " a n 7 1 0 0 6 5 , Ch i n a ;
光纤陀螺仪误差分析与补偿 共32页

2.2 光纤陀螺仪的误差补偿技术
2)改进半导体激光光源的噪声特性;
光源的波长变化、频谱分布变化及光功率的波动,将直 接影响干涉的效果。返回到光源的光直接干扰了它的发射状 态,引起二次激发,与信号光产生二次干涉,引起发光强度 和波长的波动。
目前的解决方法有: (1)对于光源波长变化的影响,通过数据处理方法解 决;若波长变化是由温度引起,则直接测量温度,进行温度 补偿; (2)对于返回光的影响,采用光隔离器,信号衰减器 或选用超辐射发光二级管等低相干光源。
光纤陀螺仪不仅具有激光陀螺仪的各种优点,而且 它无克服“自锁”用的机械抖动装置,也不用在石英块 精密加工出光路,降低了结构的复杂性和生产成本。而 且,利用不同规格的基本元件,可构成适合不同要求的 高、中、低级光纤陀螺仪,因此具有极大的设计灵活性, 得到了大力研究和发展。
4
1.1 光纤陀螺仪的组成
光源
探测器 光纤环 调制器
耦合器
光纤陀螺组成示意
6
1.2 光纤陀螺仪的分类
按原理与结构 按相位解调方式 按有无反馈信号
干涉式光纤陀螺仪(I-FOG) 谐振式光纤陀螺仪(R-FOG) 受激布里渊光纤陀螺仪(B-IFOG) 锁模光纤陀螺仪 法-珀光纤陀螺仪(Fabry-Perot) 相位差偏置式光纤陀螺仪 光外差式光纤陀螺仪 延时调制式光纤陀螺仪
9
2.1 光纤陀螺仪的主要性能指标
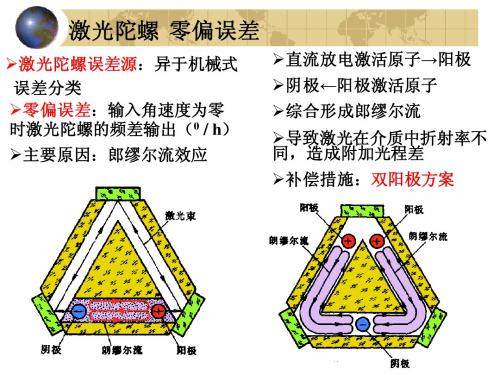
(1)零偏 当输入角速度为零时,陀螺仪的输出量,以规定时间内测得输出量 的平均值相应的等效输入角速度表示,单位为(⁰⁄h)。 (2)标度因数 陀螺仪输出量与输入量角速率的比值。 (3)零漂 又称零偏稳定性,它的大小值标志着观测值围绕零偏的离散程度, 单位为(⁰⁄h)。 (4)随机游走系数 由白噪声产生的随时间积累的输出误差系数,其量纲为⁰⁄√h,它反 映了光学陀螺输出随机噪声的强度。
三轴激光陀螺温度误差动态建模及补偿技术-光学精密工程

第1 5卷
本文结合系 统 实 际 应 用 背 景 , 对采用机械抖 动偏频技术的三轴整体式激光陀螺的温度特性进 行了深入研究 , 利用带温箱的转台构建试验系统 提出了一种温度 进行了大量高低 温 重 复 性 试 验 , 本文对 误差动态建 模 及 测 试 方 案 。 为 比 较 方 便 , 静态温度模型与动态温度模型做了对比研究 。 结 果表明 , 静态模型 对 大 变 温 率 或 大 范 围 温 变 环 境 下陀螺性能的改 善 不 显 著 , 而动态模型补偿效果 且补偿后的 陀 螺 在 全 温 度 范 围 内 精 度 优 于 明显 , / 与传统 的 静 态 模 型 相 比 , 动态建 0. 0 5ʎ h。 此外 , 模方法具有测试 时 间 短 、 模型精度高及易于工程 实现等优点 。
( 1 . ’∑ ˇ ∭∰ ˇ
∰ ˇ ∑∯ ∳∰
∰ ✕ ∰∳ ∰∑ ∳ ∰ , ∑∳ ∰∰ ‟ ˇ ∳ ˇ ˋ ˇ ≏ ˋ ˇ∭ ˇ ∳
2. ∳ ∳ ∰ ∰ ‟ ˇ ∳ ˇ ˋ ˇ ∲
, ∳ ∰∯ æ , ∑∳ ∰1 5 0 0 0 1 ∰; ∰ ˇ ∑∯✕ ˋ ∳ ∭∰ ˇ, ∳ ∳ ∰ 1 0 0 0 7 4, ∳ ∰ ) ˈ ’ ∲
] 6 实验 [ 对系统参 数 加 以 补 偿 , 从而有效地提高系
统性能 。 静态温度实验 测 试 方 法 的 实 现 过 程 : 选定多 个温度点 , 并分 别 在 各 温 度 点 下 对 该 陀 螺 进 行 恒 温测试 , 利用各 温 度 点 下 测 试 数 据 对 激 光 陀 螺 的 温度误差基于最小二乘原理拟合建模 。 对激光陀 螺 ∳ 通道轴建立零偏温度模型为 :
0 3 0 1
为当
螺的温度梯度为 沿 陀 螺 敏 感 轴 方 向 的 温 度 差 值 。 而对三轴整体式 激 光 陀 螺 而 言 , 此方向的温度梯 度很难测试 。 故 通 过 相 关 性 分 析 , 选择陀螺仪内 某点为基点 , 定义该点与光学本体某通道轴间温
激光陀螺仪误差分析与补偿技术
方案应采用正反交替旋转,否则会引入新的误差。
旋转调制技术的本质就是改变陀螺敏感轴方 向,使依附于陀螺敏感轴上的误差方向在导航系 中改变,使不同方向上的等效器件引起的系统导 航误差相互抵消,从而提高导航精度。
旋转调制技术必须具有以下几个基本条件才 能提高系统精度:1)旋转或者翻转不能增加惯 性器件误差;2)惯性器件的敏感轴方向在导航 系中有规律的变化。
• 磁镜偏频激光陀螺也是利用交变的抖动使 陀螺从锁区偏置出来。它是利用等效转动
• 恒速偏频激光陀螺是近年发展起来的一种 偏频方案,它利用速度恒定度非常高的机械 转动来实现偏频,其精度比机抖陀螺高,但 其体积大,而且输入速率范围低。
• 四频差动激光陀螺的腔体中运行着两队顺、 逆方向的激光,分别构成两个单陀螺,对它 们施加相同的法拉第效应偏频,使之远离锁 区。再把二者的拍频相减,就得到陀螺的输 入角速率。这种陀螺结构复杂,成本高,技
•《激光陀螺随机漂移的数字滤波方法研究》
激光陀螺的随机漂移噪声类似于白噪声,它 是影响激光陀螺精度的重要因素,采用数字 滤波的方法可以减小随机漂移对激光陀螺精 度的影响。常见‘AR(2)模型’、‘卡尔曼 滤波’、‘小波分析’和‘小波包分析’这 四种数字滤波方法,可以利用功率谱和Allan 方差的分析方法对这几种滤波效果进行比较。 结果表明,对于激光陀螺的随机漂移的滤除, 基于AR模型的卡尔曼滤波法的效果最好,基 本上消除了陀螺的随机误差,而小波分析法 和小波包分析法只能在一定程度上消除高频
•《船用激光陀螺捷联惯导系统中激光陀螺误差 自动补偿的方法研究》
激光陀螺误差自动补偿的一般方法是采用激光陀 螺测量轴换向法。例如,测量轴相互正交的三个 激光陀螺绕测量轴XYZ中的一个轴(例如Z轴)稳 定的旋转可以减少另外2个轴(例如X轴和Y轴) 的激光陀螺的常值漂移,但并不能减少沿Z轴激 光陀螺的漂移。理论和实践表明:陀螺组件绕不 与测量轴相重合的一般轴旋转是可行的。这种方 法称为动态自动补偿。
P08激光陀螺误差、光纤陀螺
激光陀螺 自锁原因及对策
产生原因: 产生原因:反射镜反向散射 克服自锁的途径: 克服自锁的途径: 正面:尽力减小自锁区( 正面:尽力减小自锁区(提高 光学元件质量和气体纯度) 光学元件质量和气体纯度) 间接途径: 间接途径:偏频
顺时光束 A 的反向散射 A’ A’ 和逆时光束 B 耦合 牵引(B 与 A’ 频率趋同) 牵引( 频率趋同) 类似, 类似,A 与 B’ 也频率趋同 A与B频率趋同,无频差输出 与 频率趋同 频率趋同, 加偏置ω 加偏置ω0,工作点移出自锁区
光纤陀螺 闭环干涉型
闭环测量原理: 闭环测量原理: 检测器 D 的输出经 PSD 解调 解调信号经 SF 放大 驱动相位变换器 PT 相位变换器 PT 产生相移 产生相移∆θ ∆θ和ω产生的相移 抵消 和 产生的相移 产生的相移∆φ抵消 解调器输出被控制在零位附近 PT 产生的相移 作为光纤陀 产生的相移∆θ作为光纤陀 螺的输出 引入伺服放大器 SF 和相位 变换器PT, 变换器 ,构成闭环系统 特点: 特点 : 陀螺仪的工作点一直保 持在线性度、灵敏度最高的位置。 持在线性度、灵敏度最高的位置。
激光陀螺 标度因数与自锁误差
标度因数误差 激光陀螺频差输出公式 4A ∆V = Kω K = Lλ K值不稳定,也引起误差 值不稳定, 值不稳定 K值大小的影响因素: 值大小的影响因素: 值大小的影响因素 谐振腔周长 谐振腔形状 激光波长(0.6328 / 1.15 / 3.39 ) 激光波长 K值稳定性控制途径: 值稳定性控制途径: 值稳定性控制途径 激光波长 自锁区: 自锁区: -ωL~ωL 典型值: 典型值:3600/h 谐振腔周长 280mm ~ 0.010/h ~ 5×10-6 × 120mm ~ 0.10/h ~ 3×10-4 × 自锁(Lock in)误差 自锁 误差
光纤陀螺寻北仪航向效应误差分析和补偿
Ke wo d : b ro t y o c p ;f u - o iin;n r h s e e ;q a r n itn t n e d n fe t y r s f e - p i g r s o e o rp sto i c o t - e k r u d a td si c i ;h a ig e f c o
c 【 J
柚 E 。o ∞ sn ] 6 ] r— o cs 。ig ( )
其中 。 为地球 自转 角 速度 , 当地 的地理纬度 。 为 从 O Y z 变换到 0 。33 , X。 。 o X l y 后 陀螺 仪所 能 敏 Z 感到 的地球 自转 角 速度 分量 为 :
各轴 上 的分量 可表 示 为 :
其中 、 、 、 分别为 F z OG在 4个位 置 的输 出 。
由于使用 条件 的要 求或 机械 安 装 的原 因 , 时 寻 有 北 仪工作 时 陀螺 的敏感轴 不 一定 处 于水 平 面 内 , 寻 给
北带来一 定 的困难 。
∞ o一 [ 叫
寻北方 案 , 并分析 了各种误 差源 的 影响 。但 寻北仪 的 初始方位角 与寻北精度 的关 系并 未被 研究 过 , 而在 实
际寻北过程 中 , 某些特 殊 的初 始方 位 角上 的寻 北精 度 会 大大下 降 , 种 现象 称 为 寻 北 仪 的航 向效应 , 向 这 航
1 光 纤 陀螺 仪 倾 斜 寻北 原 理
重合 。 载体 坐标 系 可 以
看 成 由地 理 坐 标 系 经 3
激光陀螺捷联惯导中陀螺比例因子误差补偿技术
激光陀螺捷联惯导中陀螺比例因子误差补偿技术冯鸿奎;钟德安;战德军;邹春华;刘扬【摘要】为了提高激光陀螺捷联惯性导航系统的导航精度,对激光陀螺的原理进行了分析和说明,重点对影响陀螺比例因子误差因素进行分析,在此基础上建立了误差补偿的精确数学模型,并针对某型激光陀螺进行了误差分析。
分析结果表明,惯导系统激光陀螺的比例因子与材料介质、温度、腔长等相关,除了采用稳频技术,还需要采用旋转调制技术提高测量数据精度。
转台仿真和实际测试结果证明,该比例因子修正的方法方便、可靠,姿态精度可提高约8.7",对提高惯导测量精度具有重要意义。
%To improve the navigation precision of laser gyro strapdown inertial navigation system ( SINS ) , this paper emphasizes the factor analysis of laser gyro scale factor,and builds the exact mathematical mod-els. Scale factor of a laser gyro is correlated with its material,temperature and field length. Analysis shows that the performance of frequency stabilization and reciprocator rotation is optimal. Table simulations and sailing experiments show that this technology is convenient,and the attitude precison can be improved by a-bout 8. 7". It is meaningful for improving the measurement precison of SINS.【期刊名称】《电讯技术》【年(卷),期】2013(000)012【总页数】4页(P1559-1562)【关键词】捷联惯性导航系统;激光陀螺;比例因子;误差补偿;单轴旋转【作者】冯鸿奎;钟德安;战德军;邹春华;刘扬【作者单位】中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431; 国防科技大学光电科学与工程学院,长沙410073;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431【正文语种】中文【中图分类】TN965;V249.32近年来,随着惯性器件的发展,激光陀螺的优势越来越明显。
激光陀螺测角仪误差理论与实验研究---可复制黏贴优秀毕业论文
分类号TN247 学号******** UDC密级公开工学硕士学位论文激光陀螺测角仪误差理论与实验研究硕士生姓名谢启华学科专业光学工程研究方向光电检测技术指导教师黄云副教授国防科学技术大学研究生院二〇一一年十一月激光陀螺测角仪误差理论与实验研究国防科学技术大学研究生院The Theoretical and Experimental Study on the Errors of the Ring Laser GoniometerCandidate:Xie Qi-huaAdvisor:Associate Professor Huang YunA dissertationSubmitted in partial fulfillment of the requirements for the degree of Master of Engineeringin Optical EngineeringGraduate School of National University of Defense Technology Changsha,Hunan,P.R.ChinaNovember,2011目录摘要.... . (i)ABSTRACT ......................................................................................................... i i 第一章绪论 (1)1.1 角度测量技术及发展现状 (1)1.1.1 角度测量技术的分类 (1)1.1.2 激光陀螺测角国内外研究发展现状 (2)1.2 激光陀螺的原理 (3)1.2.1 Sagnac效应 (3)1.2.2 激光陀螺的工作原理 (3)1.2.3 闭锁效应 (4)1.2.4 激光陀螺的特点 (4)1.3 论文主要工作 (4)第二章激光陀螺测角仪系统与测角原理 (6)2.1 激光陀螺测角仪系统的构成 (6)2.1.1 双光束干涉指零仪 (6)2.1.2 陀螺及控制系统 (9)2.1.3 转动平台及控制系统 (10)2.1.4 测角信号的处理与数据采集系统 (10)2.2 激光陀螺测角仪的工作原理 (10)2.3 本章小结 (11)第三章测角误差来源及评价 (12)3.1 误差理论简介 (12)3.1.1 误差公理及有关概念 (12)3.1.2 误差的来源及分类 (13)3.2 影响本测角方法准确度的误差源分析 (13)3.2.1 激光陀螺的影响 (14)3.2.2 指零仪的影响 (14)3.2.3 量化误差 (15)3.2.4 平面镜的制造误差 (16)3.2.5 仪器的安装误差 (16)3.2.6 振动及转速不稳的影响 (24)3.3 本章小结 (24)第四章测角仪量化误差的减小方法 (26)4.1 现场可编程门阵列 (26)4.1.1 FPGA简介 (26)4.1.2 FPGA开发软件介绍 (27)4.2 信号倍频的方法 (28)4.2.1 直接倍频法 (28)4.2.2 信号细分法 (29)4.3 脉冲细分的方法 (30)4.4 脉冲计数的FPGA实现过程 (31)4.4.1 数据处理流程 (31)4.4.2 FPGA计数模块 (32)4.5 数据采集程序 (34)4.6 本章小结 (35)第五章测角实验及结果分析 (37)5.1 实验仪器简介 (37)5.2 动态回零实验 (38)5.3 动态响应能力实验 (39)5.4 实验概述 (40)5.5 陀螺原始脉冲测角实验 (41)5.6 测试台四倍频非整周测角实验 (42)5.7 信号细分非整周角测角实验 (43)5.8 脉冲细分法非整周测角实验 (45)5.8.1 陀螺原始方波脉冲的细分实验 (45)5.8.2 四倍频鉴相方波脉冲细分实验 (46)5.8.3 八倍频鉴相方波脉冲细分实验 (47)5.8.4 十六倍频鉴相方波脉冲细分实验 (48)5.9 实验结果的对比与结论 (49)5.10 本章小结 (51)第六章总结与展望 (52)6.1 论文主要工作总结 (52)6.2 论文的后续工作 (53)参考文献 (55)作者在学期间取得的学术成果 (58)附录A 陀螺坐标系到地心坐标系的变换 (59)附录B 动态回零实验数据 (61)附录C 零位脉冲动态响应能力实验数据 (64)表目录表4.1 EP3C25Q240C8N的主要特性 (27)表5.1 动态回零实验结果 (39)表5.2 动态响应能力实验结果 (39)表5.3 陀螺原始脉冲测角实验数据 (41)表5.4 测试台四倍频测角实验数据 (42)表5.5 信号细分4倍频测角实验数据 (43)表5.6 信号细分8倍频测角实验数据 (44)表5.7 信号细分16倍频测角实验数据 (45)表5.8 陀螺原始方波细分测角实验 (46)表5.9 四倍频脉冲细分测角实验数据 (47)表5.10 八倍频鉴相脉冲细分测角实验数据 (48)表5.11 十六倍频鉴相脉冲细分测角实验数据 (49)表5.12 实验结果对比 (50)表B.1 转速为0.2rev/s与0.3rev/s时的动态回零实验数据 (61)表B.2 转速为0.4rev/s与0.5rev/s时的动态回零实验数据 (62)表C 零位脉冲在不同转速下的动态响应能力实验数据 (64)图目录图1.1 Sagnac效应 (3)图2.1 激光陀螺测角仪结构简图 (6)图2.2 指零仪的结构简图 (7)图2.3 道威棱镜的原理图 (7)图2.4 道威棱镜中光束光程差的解算 (8)图2.5 零位脉冲信号波形图 (9)图2.6 Koester棱镜的原理光路图 (9)图2.7 数据处理流程图 (10)图3.1 激光陀螺测角仪系统误差主要来源 (13)图3.2 道威棱镜的角度公差 (14)图3.3 量化误差示意图 (15)图3.4 平面镜表面局部凹凸对反射光线的影响 (16)图3.5 激光陀螺安装误差示意图 (17)图3.6 测角误差随θ和ωtφ的变化曲线 (18)图3.7 平面镜安装偏差产生的影响 (19)图3.8 平面镜或棱体的工作面对支承面的倾斜 (20)图4.1 正交解码四倍频鉴相示意图 (28)图4.2 信号细分实现过程框图 (30)图4.3 信号细分法数据处理流程图 (31)图4.4 脉冲细分法数据处理流程图 (31)图4.5 小数脉冲计数原理图 (32)图4.6 脉冲细分FPGA小数脉冲计数程序 (33)图4.7 计数模块仿真波形图 (34)图4.8 零位脉冲与陀螺脉冲的相对位置关系 (34)图4.9 采集数据的LabVIEW上位机程序 (35)图5.1 激光陀螺动态测角仪系统实物图 (37)图5.2 转台控制系统实物图 (38)摘要激光陀螺与传统的机电陀螺相比具有高灵敏度、高精度、大动态范围的特点,是惯性系统的理想角速度传感器。