1自由度习题
自由度计算举例1
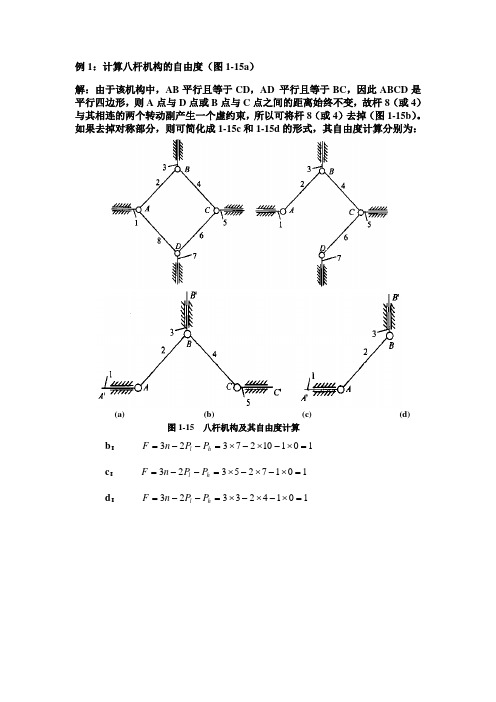
例1:计算八杆机构的自由度(图1-15a )解:由于该机构中,AB 平行且等于CD ,AD 平行且等于BC ,因此ABCD 是平行四边形,则A 点与D 点或B 点与C 点之间的距离始终不变,故杆8(或4)与其相连的两个转动副产生一个虚约束,所以可将杆8(或4)去掉(图1-15b )。
如果去掉对称部分,则可简化成1-15c 和1-15d 的形式,其自由度计算分别为:(a) (b) (c) (d) 图1-15 八杆机构及其自由度计算b : 1011027323=⨯-⨯-⨯=--=h l P P n Fc : 101725323=⨯-⨯-⨯=--=h l P P n Fd : 101423323=⨯-⨯-⨯=--=h l P P n F例2、试计算图示机构的自由度。
(若有复合铰链、局部自由度或虚约束,必须明确指出。
)并指出杆组的数目与级别以及机构级别。
例3、试对图示机构:(本小题15分)(1)计算自由度;(3分)(2)分别取构件1和7 为原动件,拆出所有杆组,并确定机构的级别(必须画出各杆组)。
(8分)(3)求构件2、8和2、5之间的速度瞬心p和25p(4分)28例4、试对图示机构:(本小题11分)(1)计算自由度;(3分)(2)对图示机构进行高副低代和结构分析,并确定该机构的级别。
(8分)例5、计算图示机构的自由度,如有复合铰链、虚约束及局部自由度,直接在图中指出(本小题10 分)。
例6:计算如图所示机构的自由度并确定机构的级别解:例7、(本小题8分)计算图示机构的自由度,并在高副低代后判断机构的级别。
例8、已知图示机构的尺寸和位置(本小题10分):1、画出高副低代机构的运动简图,直接在图上作图(4分);2、拆分基本杆组,并判断机构的级别(6分)。
例9:计算如图所示的双缸曲柄滑块机构的自由度并确定机构的级别解:1011027323=⨯-⨯-⨯=--=h l P P n F 以4为原动件以2为原动件以8为原动件。
1 平面机构运动简图和自由度 习题答案
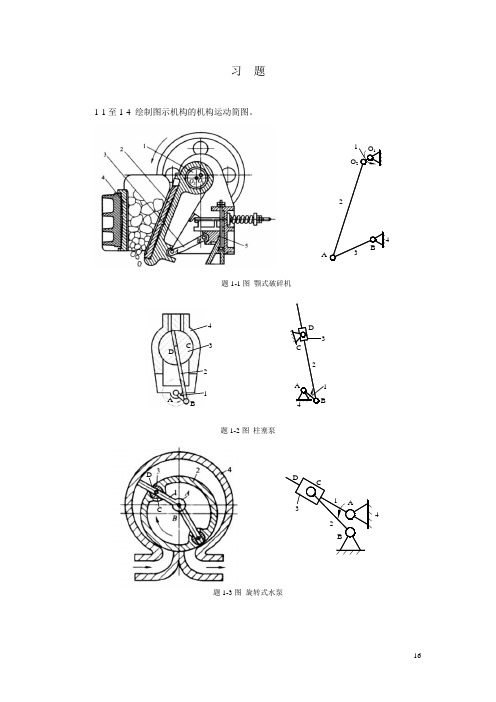
习 题1-1至1-4 绘制图示机构的机构运动简图。
题1-1图 颚式破碎机题1-2图 柱塞泵题1-3图 旋转式水泵O 1O 2AB1 234ABCD 1 2 3 4 A B CD1 234 AB CD1 2 34CD题1-4图 冲压机构1-5至1-10 指出机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
题1-6图解:构件3、4、5在D 处形成一个复合铰链,没有局部自由度和虚约束。
32352701L H F n P P =--=⨯-⨯-=解:没有复合铰链、局部自由度和虚约束。
323921301L H F n P P =--=⨯-⨯-= 题1-5图题1-5图56 ABCDEFO 1 O 2 D F1 2 345 6EGFEG题1-7图题1-8图题1-9图 题1-10图解:A 处为复合铰链,没有局部自由度和虚约束。
323721001L H F n P P =--=⨯-⨯-=解:A 处为复合铰链,没有局部自由度和虚约束。
323721001L H F n P P =--=⨯-⨯-=解:B 处为局部自由度,没有复合铰链和虚约束。
32352710L H F n P P =--=⨯-⨯-=解:C 处为复合铰链,E 处为局部自由度,没有虚约束。
32372912L H F n P P =--=⨯-⨯-=AB C DE IFG HADBECAEBCDGF1-11图示为一手动冲床机构,试绘制其机构运动简图,并计算自由度。
试分析该方案是否可行;如果不可行,给出修改方案。
题1-11图手动冲床答:此方案自由度为0,不可行。
改进方案如图所示:手动冲床运动简图手动冲床改进方案。
第1章--单自由度系统的自由振动题解

习 题1-1一单层房屋结构可简化为题1-1图所示的模型,房顶质量为m ,视为一刚性杆;柱子高h ,视为无质量的弹性杆,其抗弯刚度为EJ 。
求该房屋作水平方向振动时的固有频率。
解:由于两根杆都是弹性的,可以看作是两根相同的弹簧的并联。
等效弹簧系数为k 则 mg k δ=其中δ为两根杆的静形变量,由材料力学易知δ=324mgh EJ=则 k =324EJh设静平衡位置水平向右为正方向,则有 "m x kx =- 所以固有频率3n 24mhEJp =1-2 一均质等直杆,长为 l ,重量为W ,用两根长h 的相同的铅垂线悬挂成水平位置,如题1-2图所示。
试写出此杆绕通过重心的铅垂轴作微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角2a =h题1-1图题1-2图θF sin α2θαhmgθ2F cos =mg由动量矩定理:aha mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ&&其中12cossin ≈≈θααhl ga p ha mg ml n 22222304121==⋅+θθ&& g h a l gah l p T n 3π23π2π222===1-3求题1-3图中系统的固有频率,悬臂梁端点的刚度分别是k 1和k 3,悬臂梁的质量忽略不计。
解:悬臂梁可看成刚度分别为k 1和k 3的弹簧,因此,k 1与k 2串联,设总刚度为k 1ˊ。
k 1ˊ与k 3并联,设总刚度为k 2ˊ。
k 2ˊ与k 4串联,设总刚度为k 。
即为21211k k k k k +=',212132k k kk k k ++=',4241213231421432421k k k k k k k k k k k k k k k k k k k k ++++++=)(42412132314214324212k k k k k k k k k k m k k k k k k k k k p ++++++=1-4求题1-4图所示的阶梯轴一圆盘系统扭转振动的固有频率。
机械原理复习题2.
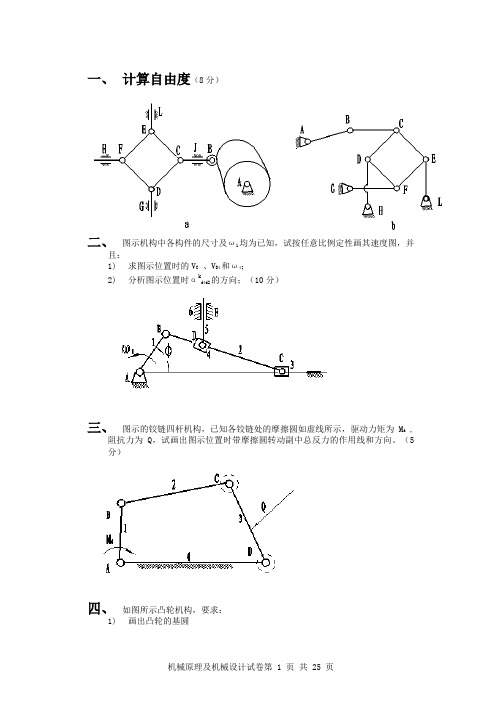
一、计算自由度(8分)二、图示机构中各构件的尺寸及ω1均为已知,试按任意比例定性画其速度图,并且:1)求图示位置时的V C、V D4和ω4;2)分析图示位置时αk d4d2的方向;(10分)三、图示的铰链四杆机构,已知各铰链处的摩擦圆如虚线所示,驱动力矩为M d ,阻抗力为Q,试画出图示位置时带摩擦圆转动副中总反力的作用线和方向。
(5分)四、如图所示凸轮机构,要求:1)画出凸轮的基圆2)画出从升程开始到图示位置时推杆的位移s,相对应的凸轮转角φ,B点的压力角α;(8分)五、计算题在图示机构中,已知各直齿圆柱齿轮模数均为m=2mm,z1 =15,z2=32,z2´=20,z3 =30,要求齿轮1、3同轴线。
试问:1)齿轮1、2和齿轮2´、3应选什麽传动类型最好?为什麽?2)齿轮1、2改变为斜齿轮传动来凑中心距,当齿数不变,模数不变时,斜齿轮的螺旋角为多少?3)若用范成法来加工齿数z1=15的斜齿轮1时,是否会产生根切?(14分)七、简答题:(20分)1.转动副的自锁条件是什麽?螺旋副的自锁条件是什麽?2.在曲柄摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,为什麽?3.若凸轮是以逆时针转动,采用偏置直动推杆时,推杆的导路应偏置于回转中心的哪一侧较合理?为什麽?4.外啮合斜齿圆柱齿轮的正确啮合条件是什麽?5.变位齿轮的分度圆、基圆、周节和基节大小都发生变化了吗?为什麽?6.压力角为15º的齿条(模数可为非标准值)能否与压力角为20º(标准模数)的齿轮正确啮合?为什麽?7.i H GK是不是周转轮系中G、K两轮的传动比?为什麽?8.槽轮机构运动特性系数k的取值范围是什麽?9. 双万向铰链机构传动比恒为1的条件是什麽?10. 什麽是机构稳定运转状态下的周期性速度波动,如何进行调节?一. 选择与填空(本题共12小题,选择题每小题2分,填空题每空1分,满分27分) (1)设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 状态。
1单自由度系统振动总结与习题
n
U=
max A n
1 k ( a ) 2 2 A
T max U max ;
2 1 2 2 1 2 ml A Ka 2 . A 2 n 2 2
n
a l
k ; m
周期 T=
2l a
m k
利用等效能量法求图示系统的固有频率
解:真实系统:T=
l 1 1 2 ) 2 + m2. x m1( 2 x 2 2 l4 l 1 l 1 2 2 U= k1 ( 1 .x) k 2. ( 3 .x) 2 l4 2 l4 1 2 等效系统 T e = me. x 2 1 2 V e = ke x 2 l 2 T=T e m e =m 2 +m 1 ( 2 ) l4 l 2 l 2 V=V e k e ( 1 ) +k 2 ( 3 ) l4 l4
4 、细杆 OA 可绕水平轴 O 转动,如图,在静平衡位置时成水平,杆端 重锤的质量为m,杆与弹簧的质量均可忽略不计,求自由振动的固有周期。
解: 为小球偏角时,弹簧伸长以及锤的位移可表示成 a ,l ,
1 m (l) 2 ; 2 令 A sin( n t ) A sin( )
l
x sin( n t )
因此梁上各点的速度分布为
( x, t ) A sin v
l
x n cos( n t )
因而动能最大值为 1 1q l 2 Tmax M n A 2 ( A sin x n ) 2 dx 2 2g 0 l 1 A 2 2 ( M 1 Q ) n 2 2g 1 1 48 EI 2 A 在最大振幅位置 Vmax KA 2 2 2 l3 48EI 由 Vmax Tmax 求得: n = 1 Q 3 M 2 g l
1平面机构自由度

二、运动副的分类
低副(面接触) 转动副:引入两个约束,保留一个自由度(转动) 移动副:引入两个约束,保留一个自由度(移动) 高副(点或线接触): 引入一个约束,保留两个自由度(切向移动+转动) 如:滚动副、凸轮副、齿轮副 。
1 自由度 1
举例:内燃机
转动副: 活塞-连杆 连杆-曲轴
气缸体
活塞
顶杆
曲轴-气缸体
1 自由度 11
1.3 平面机构的自由度 ---机构所具有的独立运动
三、计算平面机构自由度应注意的事项
(2) 局部(多余)自由度 若某构件的运动与其它构件运动无关,则该构件所具有的自由度为局部自由度。 对于含有局部自由度的机构在计算自由度时,不考虑局部自由度。
如认为F = 3×3 - 2×3 - 1=2 (错误) n = 2、pL= 2、pH = 1 F = 3n -2pL - pH =3×2 -2×2 – 1 =1(正确)
大、小齿轮-气缸体 凸轮-气缸体 凸轮
连杆 曲轴
移动副:
活塞-气缸体 顶杆-气缸体 高副: 凸轮-顶杆 大齿轮-小齿轮 小齿轮 返回 1 自由度 2 大齿轮
1.2 平面机构运动简图
一、平面机构的组成
机架:固定构件。如机床床身、车辆底盘、气缸体; -1个
构件 原(主)动件(输入构件): 运动规律已知的活动构件; 从动件:随原动件运动而运动的其余活动构件。 输出构件: 输出预期运动的从动件。 运动副 -1个或几个 -若干个
返回
4
构件的表示方法
1. 将构件上所有运动副用线 条连接起来; 2.画构件时应撇开构件的实 际外形,而只考虑运动副的 性质。
返回
5
绘制步骤
1. 分析机构运动 先找原动件; 缓慢转动原动件,找出传动路线 及输出构件; 确定机架,沿传动路线“两两分 析相对运动”,确定各构件间运 动副性质。 2. 恰当选择投影面,确定合适瞬 时位置,按传动路线画草图。 3. 测量各运动副间尺寸,选择比 例尺,画正规运动简图。 原动件上标箭头;
机械原理试题库1
机械原理自测题库——分析计算题(共88题)1、试计算图示机构的自由度(若有复合铰链、局部自由度或虚约束,必须明确指出)。
并判断该机构的运动是否确定(标有箭头的机构为原动件)。
若其运动是确定的,要进行杆组分析,并显示出拆组过程,指出各级杆组的级别、数目以及机构图a 图b)题 1 图2、计算图示机构自由度,并判定该机构是否具有确定的运动(标有箭头的构件为原动件)。
图 a) 图 b)题 2 图3、计算图示机构自由度,并确定应给原动件的数目。
图a 图b题 3 图4、在图示机构中试分析计算该机构的自由度数,若有复合铰链、局部自由度或虚约束,则在图上明确指出。
图a 图b题 4 图5、计算图示机构的自由度,并作出它们仅含低副的替代机构。
第 1 页共24 页图 a) 图 b)题 5 图6、试计算图示机构的自由度。
(若有复合铰链、局部自由度或虚约束,必须明确指出。
)并指出杆组的数目与级别以及机构级别。
LG I题 6 图7、计算下列机构的自由度(有复合铰链、虚约束和局部自由度请指出)图 a) 图 b)题 7 图8、图示的铰链四杆机构中,已知mmlAB65=,mmlCD90=,mmlAD125=,sradmmlBC/10,1251==ω,顺时针转动,试用瞬心法求:1)当φ=15°时,点C的速度V C;2)当φ=15°时,构件BC上(即BC线上或其延长线上)速度最小的一点E的位置及其速度值。
题 8 图9、在图示的凸轮机构中,已知凸轮1以等角速度ω1=10rad/s转动。
凸轮为一偏心圆,其半径R1=25mm,L AB=15mm,L AD=50mm,φ1=90°,试用瞬心法求机构2的角速度ω2。
第 2 页共24 页题 9 图10、在图示机构中,已知长度L AB=L BC=20 mm ,L CD=40mm ,∠a=∠β=90°W1=100(1/S),请用速度瞬心法求C点的速度的大小和方向题 10 图11、如图所示偏置曲柄滑块机构。
1 平面机构及其自由度
常用运动副运动简图符号
常用构件运动简图符号
1.2 平面机构运动简图
1.2.1 机构运动简图及作用 1.2.2 构件的分类
1.2.2 构件的分类
机构中的构件可分为三类: 机构中的构件可分为三类: 三类 固定件 原动件 从动件
研究机构运动时作为参考坐标系的构件;又称为 研究机构运动时作为参考坐标系的构件; 机架。 机架。 是运动规律已知的活动构件。它的运动是由外界 是运动规律已知的活动构件。 输入的,所以又称为输入件 输入件。 输入的,所以又称为输入件。 机构中随着原动件运动而运动的其余活动构件。 机构中随着原动件运动而运动的其余活动构件。 其中输出机构预期运动的从动件称为输出件 输出件。 其中输出机构预期运动的从动件称为输出件。
小型压力机及其机构运动简图
颚式破碎机及其机构运动简图绘制
腭式破碎机
活塞泵及其机构运动简图绘制
1 平面机构及其自由度
1.1 运动副及其分类 1.2 平面机构运动简图 1.3 平面机构的自由度及其计算
1.3 平面机构的自由度及其计算
1.3.1 平面机构的自由度
1.3.1 平面机构的自由度
机构的自由度: 机构中各构件相对机架所有的独立运动的数目。 机构的自由度: 机构中各构件相对机架所有的独立运动的数目。 一个作平面运动的自由构件具有三个自由度。 一个作平面运动的自由构件具有三个自由度。 每个低副引入两个约束,使构件失去两个自由度; 每个低副引入两个约束,使构件失去两个自由度; 每个高副引入一个约束,使构件失去一个自由度。 每个高副引入一个约束,使构件失去一个自由度。 个构件。 设平面机构共有 K 个构件。 活动构件数为 活动构件数为 低副数: 低副数:PL 高副数: 高副数:PH
机构具有确定运动的条件是: 机构具有确定运动的条件是: F > 0 并且给定机构的输入运动数(原动件数) 并且给定机构的输入运动数(原动件数) 等于机构的自由度数。 等于机构的自由度数。
1自由度分析
是
不是
3. 虚约束(难点)
不产生实际约束效果的重复约束。在特定的几何条 件下出现。(或称消极约束)
(1)暗含的几何条件: 两构件组成若干转动副,但转动副轴线互相重合 两构件组成若干移动副,但移动副导路互相平行 两构件组成若干高副,但各接触点公法线互相重合
(2)明确给定的几何条件: 平行、垂直、长度关系
通过严格的几何证明识别 熟悉教材例题
目的:为了改善构件的受力情况
虚约束常出现的场合—特定几何条件
场合一:用双转动副杆联接两构件上距离保持不变的两点
B 2E
C
1
3
A
D
F 33 24 1
去除构件4及其上运动副
B 2E
C
1
4
3
A
F
D
5
AB CD EF
? F 3 4 2 6 0
B
2 EC B
2EC
1
31
5
3
A
4F
A
4F
D
D
AB
EF CD
F=3n-2PL-Ph=33
-A2B4=E1F
CD
B
2
E
C
1
5
A
F
4
3
D
F=3n-2PL-Ph=33 -24=0 桁架-非虚约束
距离不变两点例2
例各构件的尺寸有如下的几何关系:
,
,
,
F = 3×4 - 2×6 = 0 ?
去除虚约束构件及其上运动副
F 33 24 1
• 机构要能运动,它的自由度必须大于零。
F≤0,构件间无相对运动,不成为机构。
原动件数W=F,运动确定
2
(完整版)机械设计基础1自由度
(约束了一个自由度)
此外,还有球面副和螺旋副,均属于空间相对运动。本课程不进行讨论。
§1-2.平面机构的运动简图
1.平面运动副的表示方法:
转动副表示方法
2.构件表示方法:
移动副表示方法
高副表示方法
两个转动副构件
一个转动副 一个移动副构件
5 F=3×5 - 2×7 = 1 ✓
(2) 局部自由度: 与整个机构运动无关的自由度。 计算机构自由度时应予排除。
F=3×3 - 2×3 -1 = 2 ×
F=3×2 - 2×2 -1 = 1 ✓
目的:变滑动磨擦为滚动磨擦,以减少磨损。计 算时应将该构件连同运动副一起除去。
(3) 虚约束: 对机构自由度是重复的约束。
第一章 平面机构的自由度 和速度分析
平面机构:所有的构件都在同一平面或在相互平行平 面内运动的机构。
§1-1.运动副及分类
自由构件:在平面内不受约束做自由运动的构件。
自由度:做平面运动的自由构件的独立的自由运动 数(三个自由度)X、Y、 。
Y
y
0
x
X
1.运动副(关节):两构件间的可动联接
定义:使两构件直接接触并能产生一定相对运动的联接。
即该机构只有一个自由度,与原 动件数相同(齿轮3为原动件)。 所以,满足机构具有确定运动的条 件。
例题3. 已知一机构如图所示,求其自由度?
解:1. A、B、C、D处为复合铰 链
2. n=7 PL= 10 PH=0
F=3n-2PL-PH=37-2100=1
即该机构只有一个自由度,与原 动件数相同(杆8为原动件)。所 以,满足机构具有确定运动的条件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.计算自由度(如有复合铰链、虚约束、局部自由度,请指出)1. D 处构成复合铰链,滚子有局部自由度,H (K )构成虚约束F=3n -2P L -P H =3×7-2×9-1=22. 计算图示机构的自由度,并判定其是否具有确定运动,(绘有箭头的构件为原动件)。
1)F=3n-2Pl-Ph---------=3*6-2*8-1=1,----------自由度数等于原动件数, 具有确定运动-OA BCDEFGHK3、计算自由度(如有复合铰链、虚约束、局部自由度,请指出)解:滚子B 为局部自由度,E 处为复合铰链。
F=3n –2P L –P h =3×7–2×9–2=1。
4、计算图示机构的自由度,并判定其是否具有确定的运动。
标有箭头的构件为原动件;如有复合铰链、局部自由度或虚约束的地方请明确指出。
解:(1)机构的自由度F =3n -2P L -P H =3×7-2×9-2=1 (2)具有确定的运动 (2)复合铰链 (3)局部自由度:滚子6、计算图示机构的自由度,如有复合铰链、局部自由度和虚约束,请指出。
并判断该机构是否具有确定运动。
解,有复合铰链 有虚约束F n p p =--=⨯-⨯-=32L H 362811该机构具有确定运动7、计算图示机构的自由度,如有复合铰链、局部自由度和虚约束,请指出。
并判断该机构是否具有确定运动。
(1)有复合铰链,位置在F 处; (2)有局部自由度,位置在A 、G 处; (3)有虚约束,位置在B 或C 处。
F n p p =--=⨯-⨯-=32372921L H因为自由度数等于原动件数,所以该机构具有确定运动。
8、计算下列机构的自由度,已知//AB =//CD =EF 。
在图中指出其复合铰链,局部自由度和虚约束,并说明该机构是否具有确定运动?(图中画有箭头的构件为原动件)解: CD 是虚约束A 、B 点是复合铰链 G 处存在局部自由度F=3n-2P L -P H = 3×8-2×11-1=1因为自由度数等于主动件数,该机构具有确定运动。
9、试计算图示机构的自由度。
若有复合铰链、局部自由度、虚约束,须在图中标出。
解: 复合铰链;局部自由度。
虚约束 n=6、P L = 8 、P H =1118263=--=X X F齿轮计算题1、某设备上一对标准直齿圆柱齿轮传动,其传动比12i =3,使用日久后齿面已严重损坏,在拆卸修配过程中,不慎将小齿轮丢失,现测得大齿轮齿数z 2=57,其齿顶圆直径d a2=236mm ,试确定:z 1、m 、d 1、d a1、a 。
解:(1) 由122112z z n n i ==得193571221===i z z(2)依式 m h mz d a a *222+= 得 mm z h d m a a 457223622*2=+=+=(3) mm mz d 7619411=⨯==(4)mm m h mz d a a 844121942*11=⨯⨯+⨯=+= (4)mm z z m a 1522)5719(42)(21=+⨯=+=2、 某变速箱中,原设计一对直齿轮,其参数为m=2.5mm ,z 1=15,z 2=38;由于两轮轴孔中心距为70mm ,试改变设计采用斜齿轮传动,以适应轴孔中心距。
试确定一对斜齿轮的主要参数(模数、齿数、压力角、螺旋角) 解:依题意,可知:斜齿轮的法面模数m n =2.5mm为了保证转动比不变,则z 1=15 z 2=38 因为是标准齿轮,所以法面压力角αn =20°3、若已知一对正常齿制标准斜齿圆柱齿轮传动的中心距为160mm ,其中一个齿轮的齿数Z 1=30,模数m n = 4 mm ,螺旋角β=150。
试求另一个齿轮的齿数Z 2、分度圆直径d 2、齿顶圆直径d a2和齿根圆直径d f 2。
63.192425.1263.202)(222=⨯⨯-=+-=**n n an f m c h d d (196.77)4、有一标准斜齿圆柱齿轮机构,不慎丢失了小齿轮,已知两轮中心距 a =134.5mm ,大齿轮齿顶圆d a2=192.35mm ,齿数Z 2=60,螺旋角β=150,今欲配制小齿轮,试计算其模数、齿数、分度圆直径和齿顶圆直径。
解:依式 βcos 2)(21z z m a n +=得 z 2 = 47(48); ,63.19415cos 474cos 022=⨯==βz m d n (198.77); 63.202222=+=*n an a m h d d (206.77)()βCos Z Z m a n 221+=()()12 2.515380.9462270n m Z Z Cos a β+⨯+===⨯︒=8.18βmm z m d n 51.8315cos 273cos 011=⨯==β mm m h d d n an a 51.89211=+=*5、一对渐开线标准圆柱直齿轮外啮合传动,已知齿轮的齿数Z 1=30,Z 2=40,分度圆压力角20=α°,齿顶高系数*ah =1,径向间隙系数C*=0.25,标准中心距a=140mm 。
试求出:齿轮的模数m ;两个齿轮的分度圆半径r 1、r 2;基圆半径r b1、r b2;齿顶圆半径r a1、r a2。
解:依式 2)(21z z m a +=得 mm z z am 4221=+=; , mm mz r 602304211=⨯==; mm mz r 802404222=⨯==; mm r r b 38.5620cos 60cos 11=︒==α; mm r r b 175.7520cos 80cos 22=︒==α;mm m h r r a a 6446011=+=+=*mm m h r r a a 8448022=+=+=*6、已知一对标准安装的渐开线直齿圆柱标准齿轮传动,中心距12100OO=mm ,模数m =4mm ,分度圆上压力角α=200,小齿轮主动,传动比i ==ωω1215/.,试计算齿轮1和2的齿数、分度圆、基圆、齿顶圆和齿根圆半径。
解:i d d 122115==. d d a 122+=算出1280 120d d ==,解:依式*22(2)cos a n a z d m h β=+ 得 m n =3mm 依式βcos 2)(21z z m a n +=解得 z 1=27z d m 1120==, z d m 2230==d d b cos .11207518=︒=mm , d m z h aa *()11288=+=mm d d b cos .222011276=︒=mm , d m z h a a *()222128=+=mmd m z h c f a **()112270=--=mm d m z h c f a **()2222110=--=mm7、已知某对渐开线直齿圆柱齿轮传动,中心距mm a 350=,传动比5.2=i ,分度圆压力角020=α, h a *=1,25.0*=c ,根据强度等要求模数m 必须在5、6、7 mm 三者中选择,试设计此对齿轮的以下参数和尺寸。
(1)齿轮的齿数z 1、z 2,模数m ;(2)分度圆直径d 1、d 2,齿顶圆直径d a1、d a2,齿根圆直径d f1、d f 2; 解:a mz z mz i mz =+=+=⨯=2212353501211()(). mmz m 1350235=⨯⨯. m z m z m z ======5406333372857111 mm mm mm.. z z m 124040251005==⨯== mm .为标准安装的标准齿轮。
d mz d mz 11225402005100500==⨯===⨯= mm mm mm 5101025)2( mm 210425)2(a 22a a 11a =⨯=+==⨯=+=**h z m d h z m dd m z h c f a ()(.).1122540251875=--=⨯-=** mm d m z h c f a ()(.).22225100254875=--=⨯-=** mm8、在一对正常齿制的渐开线标准外啮合直齿圆柱齿轮机构中,已知轮1齿数Z 1=20,i 12=2.5, 模数m=10mm ,试求:(1)轮2的齿数Z 2、分度圆半径r 2、基圆半径r b2和齿根圆半径r f2; (2)分度圆齿厚S 、基圆上的齿距P b ; (3)该对齿轮标准安装时的中心距a 。
解:(1) 505.2201212=⨯=⋅=i Z Z)(2505010212122mm Z m r =⨯⨯=⋅⋅=)(9.23420cos 250cos 22mm r r b =⨯=⋅= α)(5.23710)25.01(250*)*(2222mm m h c r h r r a f f =⨯+-=⋅+-=-=(2) )(7.15102121mm m S =⨯⨯==ππ)(5.2920cos 10cos cos mm m p p b =⨯⨯=⋅=⋅= παπα(3) ())(350)5020(10212121mm Z Z m a =+⨯⨯=+=9、一对外啮合直齿轮传动中,已知两轮的齿数1z =20、2z =40,模数m =3mm ,压力角α=︒20,正常齿制,标准安装。
求: (1)分度圆半径1r 和2r ; (2)中心距a ; (3)基圆半径1b r 和2b r ; (4)齿顶圆半径1a r 和2a r ;(5)齿根圆半径1f r 和2f r ; (6)法向齿距nP 。
解:(1)111302r mz mm == 221602r mz mm ==; (2)90a mm =;(3)11cos 30cos 2028.191b r r mm α==⨯=22cos 60cos 2056.382b r r mm α==⨯=;(4)*1133a ar r h m mm =+= *2263a a r r h m mm =+=(5)**11()26.25f a r r h m c m mm =-+=**22()56.25f a r r h m c m mm =-+=;(6)cos cos 3cos 208.856n b p p p m mm απαπ==⋅=⋅=⨯⨯=。