激光三角测距法
光电子课程设计_基于三角测量法的激光测距

光电子课程设计_基于三角测量法的激光测距光电子课程设计:基于三角测量法的激光测距摘要:本文先对激光测距的种类及原理进行介绍,其次分析不同种类的优缺点。
确定制作测距仪器的制作方向。
分析测量当中不同元器件存在的问题,寻找有效的解决方案,重点研究摄像头成像时存在误差的形成原因。
根据研究得到的数据,对PC客户端的程序设计进行调整。
利用程序尽可能减少由于硬件产生的误差。
重点是设计出能确定光点的定位算法,通过对摄像头的定标、激光定位,达到实验数据与实际测量误差在10%以内。
最后,提出对作品进行优化和系统功能提升计划关键词:短距离、低成本、三角测量法ABSTRACT: In this paper, the principle of laser ranging species and introduced first, followed by analysis of the advantages and disadvantages of different types. Production rangefinder to determine the direction of the production. Analytical measurements among different components of the problems, to find effective solutions to the causes errors in the presence of the camera focused on imaging. According to data obtained from studies on the client PC programming adjustments. The use of procedures to minimize errors due to hardware-generated. Focuses the light spot can be determined to design the location algorithm, through the camera calibration, laser positioning, to the experimental data and the actual measurement error is within 10%. Finally, the work in optimizing system functionality and Enhancement ProgrammeKEY WORDS: Short distance、Low cost 、Triangle measurement目录1、前言1.1激光测距1.2激光测距仪1.3三角测量法激光测距简介1.4设计目标2、测距方案2.1几种常用的测距方法2.1.1手持激光测距仪2.1.2望远镜式激光测距仪2.2测距方案选定2.3三角测量法3、硬件模块设计3.1激光发射模块设计3.2信号接收模块设计3.2.1摄像头定标3.3激光出射角4、PC程序设计4.1摄像头调用4.2光点定位5、结论前言1.1激光测距激光测距(laser distance measuring)是以激光器作为光源进行测距激光测距技术是一种集合了光学、计算机科学、机械设计等的高新技术。
三角法激光雷达测距原理

三角法激光雷达测距原理
三角法激光雷达是一种基于光学测量原理的仪器,主要用于测量远距离、高精度的距离和速度。
三角法激光雷达测距原理基于光学三角法,利用激光束在空气中传播
时的光程差测量物体距离。
激光束从雷达发射器出射,射到目标物体
后反射回来,雷达接收器接收到反射回来的激光信号。
根据激光信号
的时间差和速度,通过计算反射光程差,即可精确测量目标物体的距离。
激光雷达通常采用波长在850 nm到1550 nm之间的激光,具有较好的直线传输和小的散焦率,可用于长距离测量和高精度测量。
同时,
三角法激光雷达还可以通过接收器接收多束激光信号,利用多普勒效
应测量目标物体的速度。
三角法激光雷达在工业、军事、环境监测等领域有着广泛的应用。
在
工业领域,它可以用于测量复杂构型或难以触及的物体的精准距离和
形状,可用于制造、质量控制、机器人自主导航等方面;在军事领域,激光雷达可用于侦察、监视、导航等方面;在环境监测方面,它可以
用于测量山区、林区等地形复杂的地区的气象、地质和生态信息等。
总的来说,三角法激光雷达测距原理是一种非常精准和实用的测量技术,它已经被广泛应用于各个领域,并对人们的生产和生活带来了很大的便利。
激光三角法测距原理研究

《激光三角法测距原理研究》摘要:文献标识码:A 文章编号:1006-4311(2020)22-0242-03,对于激光三角法测距的原理的研究可以为激光三角法的实际测量提供良好的指导作用,本文在研究激光三角法测距的原理的过程中对激光三角法测距的已有光路与重要器件进行分析,找出各方案的特点吴博文冯国强摘要:激光三角法测距是一种以激光为光源的非接触式测量方法,其测量速度快、精度高,已被广泛的应用于工业生产检测领域。
本文首先介绍了激光三角法测距的基本原理;然后对不同的测量方案例如直射式和斜射式单点激光三角法测距进行系统的分析和比较;其次对各个测量方案的优缺点、各方案中采用的光电仪器的作用与优劣,以及影响激光三角法测量结果的因素与其解决方法进行了归纳和分析。
Abstract: Laser triangulation is a non - contact measuring method with laser as the light source. It has been widely used in the field of industrial production inspection. This paper first introduces the basic principle of laser triangulation method, and then analyzes and compares the different measurement schemes such as direct beam and oblique beam single point laser triangulation method. Secondly, the advantages and disadvantages of each measurement scheme, the functions and advantages and disadvantages of the photoelectric instruments used in each scheme,as well as the factors affecting the measurement results of laser triangulation method and their solutions are summarized and analyzed. Finally, an improved laser triangulation measurement scheme is designed and its feasibility and influencing factors are discussed. The development trend and prospect of laser triangulation are deduced.关键词:激光三角法;测距;直射式;斜射式Key words: laser triangulation;distance;direct type;oblique type中图分类号:TN249 文献标识码:A 文章编号:1006-4311(2020)22-0242-030 引言随着工业的发展,与科学技术的进步,在一些领域对测量方面的要求越来越高越来越严格。
室内大范围高速激光三角测距技术的研究与实现
1.成像系统结构设计
光学成像系统的结构设计包括对激光发射器、镜头、 以及感光元件 CCD 进行合理的选型,同时对三者的位 置关系进行合理布局[4],设置能满足测距指标的几何结 构参数。 1.1 镜头选型 由三角测距法原理和光学知识,镜头视角决定了测
距模块的测距范围。 同时, 为了满足远距离测距的要求, 镜头要有足够大的焦距。而视角与焦距两个参数相互制 约,因此镜头摄入范围和拍摄距离是一对相互制约的两 个因素[5-6]。所以在进行镜头选择的时候,要使镜头的视 角和焦距两个参数既能保证镜头有较大测量距离又能 保证有合理的测量范围,对于两个参数的确定要保持适 中的原则。 另一方面, 镜头成像尺寸必须适配选定的 CCD [7] 尺寸 ,本系统采用的 CCD 感光面长度为 8.192mm,所 以综合以上因素并经过实际调试,本文选择成像面 1/2 英寸,焦距为 9mm,视场角为 52°,接口为 m12 型号 的镜头作为成像系统镜头,该镜头能够保证在本系统成 像结构中连续采集到 48mm ~6311mm 范围内的激光光 斑。 1.2.传感器选型 本文选用 PANVISION 公司的 RPLIS-2048EX 型号的 CCD 传感器, 该传感器拥有 2048 个像素, 单个像素尺寸 为 4 µm * 32 µm,分辨率高于市面上绝大多数 CCD 传感 器, 线阵长度为 8.192mm, 最高工作频率可达 2.5Mhz。 同时,该传感器具有先进滤波技术,可有效抑制噪声干 扰,一定程度减小光斑中心位置的像移偏移量误差。同 时内置二值化电路,三种阈值设置方法:可以外部输入 参考电压作为阈值, 通过内置 DAC 人为设置阈值或由内 置 ADT 模块自动生成阈值, 省去了后续人为设计信号处 理电路的过程,方便了后期图像的处理。传统三角测距 系统 CCD 传感器分辨率不高,不利于远距离精确测量, 成像面尺寸过大,需要设计专门的透镜成像结构进行匹 配[8],并且功能单一,需要人为设计后续滤波电路与信 号处理电路,该 CCD 传感器充分克服了以上不足。传感 器参数如表 1 所示.
基于PSD的激光三角测距法原理、系统和精度分析
基于PSD的激光三角测距法原理、系统和精度分析激光三角测距法原理、系统和精度分析1.三角测距方式三角测距是一种测量距离的方法,通过测量三角形的三个角度或三个边长来确定目标物体与测量仪之间的距离。
激光三角测距法就是利用激光束发射器向目标物体发射激光束,然后通过接收器接收反射回来的激光束,最后利用三角形计算目标物体与测量仪之间的距离。
2.激光三角法原理分析激光三角测距法是利用激光束在空间中直线传播的特性,通过测量激光束的发射方向和反射方向之间的角度差,来计算目标物体与测量仪之间的距离。
在实际应用中,通常采用相位测量法来测量激光束的相位差,进而计算出角度差,从而得到目标物体与测量仪之间的距离。
3.激光三角法距离计算激光三角测距法的距离计算涉及到角度测量和相位测量两个方面。
角度测量是通过测量激光束的发射方向和反射方向之间的角度差来实现的,而相位测量则是通过测量激光束的相位差来计算角度差。
最终,通过三角形计算公式,可以得到目标物体与测量仪之间的距离。
4.激光三角法精度分析激光三角测距法的精度受到多种因素的影响,包括系统探测能力、像点弥散斑等。
系统探测能力是指系统对光信号的接收能力,它受到PSD接收光功率、光能质心等因素的影响。
像点弥散斑是指激光束在目标物体表面反射时产生的光斑扩散现象,它会对系统的探测能力产生影响。
5.系统探测能力的影响因素5.1 PSD接收光功率对系统探测能力的影响PSD接收光功率是影响系统探测能力的重要因素之一,它受到激光束功率、反射率等因素的影响。
当PSD接收光功率较小时,系统的探测能力会受到限制,从而影响测量精度。
因此,在实际应用中,需要采用一定的技术手段来提高PSD接收光功率,以提高系统的探测能力。
5.2 光能质心对探测能力的影响光能质心是指激光束在PSD上的位置,它受到激光束发射方向、反射面形状等因素的影响。
当光能质心偏离PSD中心时,会导致系统的探测能力下降,从而影响测量精度。
激光三角法测距传感器的设计与实现
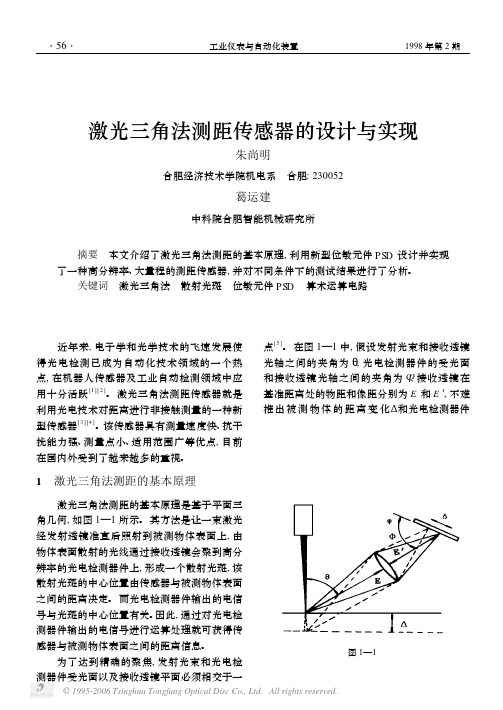
机, 在室温和自然光下, 以不同的物体作被测目 标, 对其应用特性进行了测试。 测试结果表明, 以具有均匀散射特性的物体作为被测目标时, 可以达到较好的精度和线性度。 如以白纸为目 标, 测 距 范 围 可 达 60 · 140mm , 分 辨 率 可 达 011mm。 以非均匀散射的物体作被测目标时, 该传感器的精度和线性度略有下降。 以黑色物 体 (如橡胶) 作被测目标时, 由于散射光斑较弱, 位敏元件 PSD 的输出较小, 测距离误差较大。 而以非匹配表面 (粗糙度太高或太低) 的物体及 透明体作被测目标时, 由于位敏元件 PSD 接收 不到散射光斑, 传感器基本上无输出。
4 结束语
不能使用具有非匹配表面的物体以及透明 物体作被测目标, 这是激光三角法测距传感器 的主要不足之处。 但在实际测量中大多数物体 的表面都是具有散射特性的, 因此该传感器无 论是在工业自动检测领域还是在机器人上都有 着广阔的应用前景。
参考文献
1 Toku ji O kada, J ap an, D evelopm en t of an O p ti2 ca l D istance Sen so r fo r Robo ts, T he In terna tona l Jou r2 na l of Robo tics R esea rch, V o l. 1, N o. 4,W in ter 1982.
信号处理电路的主要功能是将位敏元件 PSD 的输出电流 I1 和 I2, 经过放大和运算处 理, 变换成与距离相对应的电压信号。
信号处理电路由前级放大电路、脉冲解调 电路、算术运算电路、后级放大电路、自动控制 增益电路和监测指示电路几部分组成。其中, 算 术运算电路是最核心的部分。 由于各光学器件 的实际定位值与理论设计值之间有一定的差 别, 这些差别都会以非线性的形式反映在传感 器的输出上。因此, 我们所设计的算术运算电路 除了能实现式 (1—1) 和 (2—1) 所要求的算术运 算功能外, 还能够通过调整电路参数来改善传 感器的非线性。可以说, 该部分电路的性能直接 影响了测距传感器的测量精度和线性度。
激光三角法测距原理研究
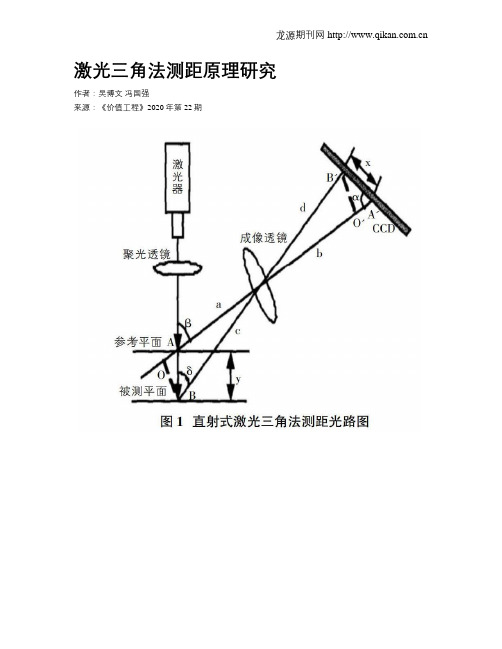
激光三角法测距原理研究作者:吴博文冯国强来源:《价值工程》2020年第22期摘要:激光三角法测距是一种以激光为光源的非接触式测量方法,其测量速度快、精度高,已被广泛的应用于工业生产检测领域。
本文首先介绍了激光三角法测距的基本原理;然后对不同的测量方案例如直射式和斜射式单点激光三角法测距进行系统的分析和比较;其次对各个测量方案的优缺点、各方案中采用的光电仪器的作用与优劣,以及影响激光三角法测量结果的因素与其解决方法进行了归纳和分析。
Abstract: Laser triangulation is a non - contact measuring method with laser as the light source. It has been widely used in the field of industrial production inspection. This paper first introduces the basic principle of laser triangulation method, and then analyzes and compares the different measurement schemes such as direct beam and oblique beam single point laser triangulation method. Secondly, the advantages and disadvantages of each measurement scheme, the functions and advantages and disadvantages of the photoelectric instruments used in each scheme, as well as the factors affecting the measurement results of laser triangulation method and their solutions are summarized and analyzed. Finally, an improved laser triangulation measurement scheme is designed and its feasibility and influencing factors are discussed. The development trend and prospect of laser triangulation are deduced.关键词:激光三角法;测距;直射式;斜射式Key words: laser triangulation;distance;direct type;oblique type中图分类号:TN249; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文献标识码:A; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文章编号:1006-4311(2020)22-0242-030; 引言随着工业的发展,与科学技术的进步,在一些领域对测量方面的要求越来越高越来越严格。
激光三角法综述
在激光三角法中, 由光源发出的一束激光照射在 待测物体平面上, 通过反射最后在检测器上成像。当物 体表面的位置发生改变时, 其所成的像在检测器上也 发生相应的位移。通过像移和实际位移之间的关系式, 真实的物体位移可以由对像移的检测和计算得到。 激
作为当前研究和需求的热点, 国内现在缺少专门 对于激光三角法的综述性文章, 因此对于激光三角法 的综述性文章是必要的。文章以下章节安排如下: 第二
率, 即激光三角法的放大倍率 Θ:
Θ=
∃∃d∆=
s′s sinΑsinΒ [ s′sinΑ- sin (Α+ Β) ]2
(4)
系统的放大倍率决定了系统的分辨率, 而放大倍 率不但取决于系统参数, 还是像移 d 的函数。
3 激光三角传感器的硬件架构和信号处理
311 硬件结构 激光三角传感器从光路设计上主要可以分为以下
当检测器采用 PSD 时, 其输出为电流量的模拟 值, 后续处理主要由前文所述的硬件电路进行较为简 单的信息处理。其处理框图如图 2 所示。图 2 中, 信号 的运算包括对电流信号的求和, 相减以及用除法电路 计算信号和与差的比值; 信号的传送中可以采用上文 中提到的调制法电路和采样保持法电路。
图 2 PSD 前置电路框图 当检测器采用 CCD 时, 获取的信号是一副图像。 而图像处理就成为决定激光三角传感器的精度和速度 的重要步骤, 其处理目的主要是得到图像传感器上像 移的精确值。一般采取的图像处理步骤有阈值变换 (二 值化) , 图像增强, 图像的细化。与一般的图像处理不同 的是, 其处理需要对激光在 CCD 上的投影点的位置做 到亚像素 (Subp ixel) 级的精度的估计。 通常是获得图 像边缘的像素级信息 (粗定位) , 之后通过插值拟合的 方法得到亚像素级的精度 (细定位) , 主要方法有 L ap lacian of Gau ssian (LO G ) 技 术[9] , 灰 阶 矩 量 法 (G rey L evelM om en t Edge O p erato r) [10] 和双边指数法 ( tw o sided exponen t ial edge op erato r) [11]。 标定的目的是补偿光学传感器部分的几何扭曲,