激光三角法测量物体位移
激光三角法测量物体位移

《光电检测课程设计》题目名称激光三角法测位移学生姓名毛启盛专业测控技术与仪器学号*********指导教师王凌云光电工程学院2015年 12 月摘要本课程设计基于激光三角法原理对物体较小范围内的移动进行测量。
在长度、距离及三位形貌等的测试中有广泛应用。
通过激光三角法两个方案直射式和斜射式的特点,结合实验条件,选择最合适的方案进行测量。
本次测量最大的特点就是非接触式测距,实际中对非接触式测距一般很难知道物体到成像透镜的距离,可由成像透镜焦距以及激光光线和物体散射光线组成的三角形的边长计算出该距离。
通过定标,得出透镜上成像距离与物体像移动距离间的对应关系,用此标尺作为计算移动位移的标准。
移动物体采集光斑图像,用matlab软件对图像处理进行处理,计算像的移动距离,再根据几何关系推导出物体的实际移动距离。
在最后计算出该方案的标准不确定度,并对方案产生的误差进行分析,提出改进意见。
设计方案光路简单,方便快捷,受环境影响小而且测量精确度较高。
关键词:激光三角法;测距;定标;CCD;误差分析目录引言 (1)1. 设计任务 (1)2. 激光三角法测距基本原理 (1)3.方案论证和选择 (2)3.1 激光三角法测距现状 (2)3.2 测量方案 (2)3.3 方案比较与选择 (4)3.4 器件选择 (6)4. 方案验证步骤及数据记录 (6)4.1 方案验证步骤 (6)4.2 测量数据记录 (6)4.2.1 测量获得成像透镜焦距 (6)4.2.2 定标 (7)4.2.3 移动物体测量位移 (8)5. 测量数据处理 (8)5.1 各个距离测量值计算 (8)5.2 定标计算 (9)5.3 光斑位移量计算 (10)5.4夹角和物体实际移动位移计算 (11)6. 误差分析及方案评价 (12)6.1 相对误差和绝对误差计算 (12)6.2 误差分析 (12)6.3 设计方案评价 (13)7. 课题分析评价 (13)8. 课设总结 (14)参考文献 (14)附录1 实验器件清单 (15)附录2 实验光路图 (17)附录3 图像处理程序 (18)附录4 光斑图像处理后灰度图 (19)附录5 物体移动光斑图 (20)引言激光具有方向性好、单色性好、亮度高等特点,因此利用它们作为测距的发射源有很多优势,比如测量速度快、精度高、测距远等。
激光位移传感器的激光三角测量法原理与激光回波分析原理解析
激光位移传感器的激光三角测量法原理与激光回波分析原理解析激光位移传感器可以测量位移、厚度、振动、距离、直径等精密的几何测量。
激光有直线度好的优良特性,同样激光位移传感器相对于我们已知的超声波传感器有更高的精度。
但是,激光的产生装置相对比较复杂且体积较大,因此会对激光位移传感器的应用范围要求较苛刻。
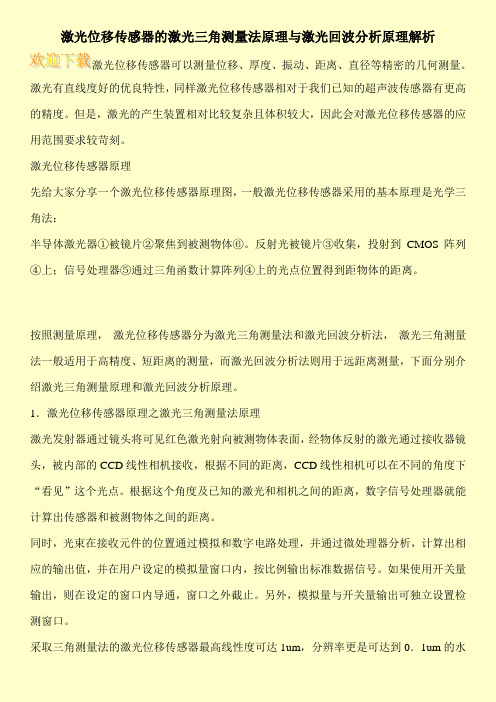
激光位移传感器原理先给大家分享一个激光位移传感器原理图,一般激光位移传感器采用的基本原理是光学三角法:半导体激光器①被镜片②聚焦到被测物体⑥。
反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。
按照测量原理,激光位移传感器分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量,下面分别介绍激光三角测量原理和激光回波分析原理。
1.激光位移传感器原理之激光三角测量法原理激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。
根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。
同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。
如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。
另外,模拟量与开关量输出可独立设置检测窗口。
采取三角测量法的激光位移传感器最高线性度可达1um,分辨率更是可达到0.1um的水平。
比如ZLDS100类型的传感器,它可以达到0.01%高分辨率,0.1%高线性度,9.4KHz 高响应,适应恶劣环境。
2.激光位移传感器原理之激光回波分析原理激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。
传感器内部是由处理器单元、回波处理单元、激光发射器、激光接收器等部分组成。
微位移的直射式激光三角法精密测量

70
西 安 工 业 大 学 学 报 第 38 卷
面 上 的 激 光 产 生 的 光 斑 位 置 一 旦 发 生 改 变 ,光 反 射 或散射的角度也会随之改变[3].但随着工业技 术 的 发 展 ,对 微 小 位 移 检 测 的 要 求 越 来 越 高 ,高 精 度 、小 型化和智能化 成 为 三 角 测 距 的 发 展 方 向[4?5].文 献 [6?8]比较了几种常用的充分 利用光 斑附近众 多 信 息的线阵(ChargeCoupledDevice,CCD)亚像 素细 分 算 法 ,并 通 过 对 采 集 的 光 斑 图 像 进 行 离 线 分 析 和 处 理 ,对 这 些 算 法 做 了 分 析 、比 较 和 改 进 ,找 到 了 一 种精度较高且便于硬件实现的相对最优的算 法 ——— 倍 频 插 值 的 灰 度 质 心 算 法 ,显 著 地 提 高 了 系 统的定位精度和 稳 定 性,但 是 存 在 测 距 精 度 低,算 法复杂,价格昂 贵 等 问 题.文 献 [9?14]在 测 量 微 小 位移 的 试 验 中,使 用 了 位 置 传 感 器 (PositionSen sorsDetector,PSD),其 原 理 是 在 位 置 传 感 器 上 的 光 斑 成 像 的 位 置 发 生 移 动 ,即 当 被 测 物 体 沿 激 光 方 向发生移 动 时,PSD 上 受 光 面 的 光 斑 就 会 随 之 移 动,经过上位机多 次 采 集 和 处 理,采 用 曲 线 拟 合 的 方 法 找 出 光 斑 位 移 与 物 体 实 际 距 离 的 对 应 关 系 ,从 而 间 接 实 现 激 光 测 距 ,为 微 小 位 移 的 测 量 提 供 了 理 论 基 础 . [9?13]
PSD)来采集光点位置信息,通过电流/电压转换电路、放大电路、滤波电 路和 A/D 模数 转换电
激光位移传感器三角法位移测量原理的流程讲解
文章标题:深度探讨激光位移传感器三角法位移测量原理激光位移传感器是一种常用的高精度位移测量设备,其原理基于三角法。
在工业生产和科学研究中,激光位移传感器被广泛应用于各种需要精密测量的领域,如机械加工、材料测试、建筑工程等。
本文将从深度和广度的角度对激光位移传感器三角法位移测量原理进行全面探讨,旨在帮助读者全面理解和掌握这一重要原理。
一、激光位移传感器的工作原理激光位移传感器是通过激光束测量目标物体表面到传感器本体的距离,从而实现对目标物体位移的测量。
激光位移传感器内部包含激光器、接收器和信号处理器等关键部件,其工作原理基于激光的反射和回波时间的测量。
激光位移传感器能够实现高精度的位移测量,其原理基于三角法。
二、激光位移传感器三角法位移测量原理的流程讲解2.1 发射激光束当激光位移传感器开始工作时,激光器内的激光束被发射出去,同时记录下发射的时间t1。
2.2 激光束照射目标物体激光束照射到目标物体表面后,被反射回激光位移传感器,同时记录下接收的时间t2。
2.3 计算激光束的传播时间利用激光发射和接收的时间差Δt=t2-t1,结合光速c,可以计算出激光束的传播时间。
根据传播时间和光速的关系,可以得到激光束从传感器到目标物体表面再返回传感器的距离。
2.4 计算目标物体的位移通过测量激光束的传播时间和目标物体的距离,可以计算出目标物体的位移。
激光位移传感器利用三角法原理,通过测量激光束的传播时间和目标物体的距离,实现对目标物体位移的精确测量。
三、总结回顾激光位移传感器的三角法位移测量原理是基于激光的反射和回波时间的测量,通过测量激光束的传播时间和目标物体的距离,实现对目标物体位移的精确测量。
这一原理在工业生产和科学研究中具有重要的应用价值,对于提高生产效率和实现精密测量起着至关重要的作用。
对激光位移传感器三角法位移测量原理进行深入的了解和掌握,对于工程技术人员和科研人员来说是至关重要的。
个人观点与理解经过对激光位移传感器三角法位移测量原理的深入研究和思考,我认为这一原理的实现过程虽然复杂,但其基本原理是相对简单的。
激光三角法测距原理研究

《激光三角法测距原理研究》摘要:文献标识码:A 文章编号:1006-4311(2020)22-0242-03,对于激光三角法测距的原理的研究可以为激光三角法的实际测量提供良好的指导作用,本文在研究激光三角法测距的原理的过程中对激光三角法测距的已有光路与重要器件进行分析,找出各方案的特点吴博文冯国强摘要:激光三角法测距是一种以激光为光源的非接触式测量方法,其测量速度快、精度高,已被广泛的应用于工业生产检测领域。
本文首先介绍了激光三角法测距的基本原理;然后对不同的测量方案例如直射式和斜射式单点激光三角法测距进行系统的分析和比较;其次对各个测量方案的优缺点、各方案中采用的光电仪器的作用与优劣,以及影响激光三角法测量结果的因素与其解决方法进行了归纳和分析。
Abstract: Laser triangulation is a non - contact measuring method with laser as the light source. It has been widely used in the field of industrial production inspection. This paper first introduces the basic principle of laser triangulation method, and then analyzes and compares the different measurement schemes such as direct beam and oblique beam single point laser triangulation method. Secondly, the advantages and disadvantages of each measurement scheme, the functions and advantages and disadvantages of the photoelectric instruments used in each scheme,as well as the factors affecting the measurement results of laser triangulation method and their solutions are summarized and analyzed. Finally, an improved laser triangulation measurement scheme is designed and its feasibility and influencing factors are discussed. The development trend and prospect of laser triangulation are deduced.关键词:激光三角法;测距;直射式;斜射式Key words: laser triangulation;distance;direct type;oblique type中图分类号:TN249 文献标识码:A 文章编号:1006-4311(2020)22-0242-030 引言随着工业的发展,与科学技术的进步,在一些领域对测量方面的要求越来越高越来越严格。
三角激光测距实验报告

三角激光测距实验报告一.成员及分工1120122719董盼:学习本门课的相关知识,辅助实验进行,搭建实验模块。
1120122728彭文博:学习本门课的相关知识,辅助实验进行,完成实验报告。
二.实验目的学习激光三角测距基本原理;了解激光三角测距的应用;搭建激光三角测距系统,实现测量距离的显示,掌握激光三角测距技术。
三.实验原理三角位移测量系统是从光源发射一束光到被测物体表面,在另一方向通过成像观察反射光点的位置,从而计算出物点的位移。
由于入射光和反射光构成一个三角形,所以这种方法被称为三角测量法,又可按入射光线与被测工件表面法线的关系分为直射式和斜射式。
3.2.1 直射式激光器发出的光线,经会聚透镜聚焦后垂直入射到被测物体表面上,物体移动或表面变化导致入射光点沿入射光轴移动。
接收透镜接收来 自入射光点处的散射光,并将其成像在光点位置探测器(如 PSD 、CCD)敏感面上。
若光点在成像面上的位移为 x ′,利用相似三角形各边之间的比例关系,按下式可求出被测面的位移进而得:式中,a 为激光束光轴和接收光轴的交点到接收透镜前主面的距离;b 为接收透镜后主面到成像面中心点的距离;θ1为激光束光轴与接收透镜光轴之间的夹角;θ2为探测器与接收透镜光轴之间的夹角。
3.2.2 斜射式激光器发出的光与被测面的法线方向成一定角度入射 到被测面上,同样用接收透镜接收光点在被测面的散射光或反射光。
若光点的像在探测器敏感面上移动 x ′,利用相似三角形的比例关系,则物体表面沿法线方向的移动距离为式中,θ1为激光束光轴与被测面法线之间的夹角;θ2为成像βαβαsin sin cos cos `⋅⋅=⋅-+⋅x x x b a x )sin(sin sin αβαβ+-⋅⋅⋅=x b x a x )sin()sin(sin cos βγαγαβγ++⋅-+⋅⋅⋅=x b x a x透镜光轴与被测面法线之间的夹角。
为探测器光轴与成像透镜光轴之间的夹角。
激光三角法测量物体位移
课程设计Ⅱ(论文)说明书题目:激光三角法测量物体位移学院: 电子工程与自动化学院专业:光信息科学与技术学生姓名:学号:指导教师:2014年1月5日摘要本文介绍了单点式光学三角法测量物体位移的两种结构一直射式与斜射式,对两种结构的测量原理进行了分析并对其各自的特点进行了阐述。
以半导体激光器作为光源,CCD 作为光电探测器件,采用直射式结构设计了一种光电位移传感器。
为了提高测量精度,简化计算过程,该课题通过设定一个基准点与实际测量点进行比较得出像点的位移图像,在用软件处理后计算出实际位移。
后面对实验误差进行分析和方案进行评价。
关键字:三角法测距;CCD图像传感器;激光;光斑。
引言激光三角法位移测量的原理是,用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置高度不同,所接受散射或反射光线的角度也不同,用CCD光电探测器测出光斑像的位置,就可以计算出主光线的角度,从而计算出物体表面激光照射点的位置高度。
当物体沿激光线方向发生移动时,测量结果就将发生改变,从而实现用激光测量物体的位移。
过去,由于成本和体积等问题的限制,其应用未能普及。
随着近年来电子技术的飞速发展,特别是半导体激光器和CCD等图象探测用电子芯片的发展,激光三角侧距器在性能改进的同时,体积不断缩小,成本不断降低,正逐步从研究走向实际应用,从实验室走向实际。
用于测量从传感器至目标之间直线距离的激光三角测量传感器已经使用了十多年了,由于数字电子器件和大功率数字信号处理器(DSP)的结合使得激光不再对目标颜色、纹理和周围环境以及环境光线和温度变化那么敏感了,激光三角测量技术方法已经得到了发展。
目录引言 (1)1课程设计目的: (3)2 设计内容 (3)3 设计要求 (3)4 方案论证和选择 (3)4.1 直射式激光三角法原理 (3)4.2斜射式激光三角法原理 (4)4.3直射三角法改进一 (6)4.4 直射式改进方法二 (7)5 仪器及元件的选择 (8)6 偏振图像采集 (8)6.1.1实验光路图 (8)6.1.2 测量物体位移步骤: (9)6.2 定标: (9)6.3测量焦距 (10)7实验结果与分析 (10)7.1.1 定标数据 (10)7.1.2焦距f的测定数据及处理 (10)7.2b的测量数据及处理 (11)7.3 物体位移数据: (11)8 实验评价 (13)8.1 误差分析: (13)8.2方案评价 (13)9. 课设总结 (14)10. 参考文献 (14)附件一:实验仪器 (15)附件二:实验采集图像 (15)附件三:实验程序 (18)附件四:实验光路图 (19)1课程设计目的:(1) 学习并掌握激光三角法测距的基本原理和方法;(2)锻炼学生的自主学习和动手能力;(3)扎实基础,提升能力。
激光位移传感器三角法位移测量原理的流程讲解
激光位移传感器三角法位移测量原理的流程讲解激光位移传感器三角法位移测量原理的流程讲解一、引言激光位移传感器是一种常用的测量设备,广泛应用于自动化控制、机械制造、光学仪器等领域。
它通过利用激光束的干涉原理,实现对物体位移的精确测量。
本文将从深度和广度的角度,详细讲解激光位移传感器使用的三角法位移测量原理的流程,并分享笔者的个人观点和理解。
二、激光位移传感器三角法位移测量原理的介绍三角法位移测量原理是基于几何三角学的原理,通过测量激光束入射角度和反射角度的变化,进而计算出物体的位移。
该原理的基本思想是,根据光线的入射角度和反射角度之间的关系,利用三角函数计算出位移的大小。
下面是激光位移传感器三角法位移测量的流程讲解:1. 激光束发射:激光位移传感器首先通过一个激光发射器发射一束平行的单色激光束。
2. 光束照射:激光束照射到待测物体表面,产生可见光的反射。
3. 反射光线接收:激光位移传感器中的接收器接收到反射光线,其中包括入射角度和反射角度的信息。
4. 角度测量:接收到的反射光线经过光电元件转化为电信号,进而通过电子元件测量入射角度和反射角度。
5. 位移计算:根据几何三角学的原理,利用三角函数计算出位移的大小。
一般情况下,我们可以通过测量入射角度和反射角度的差值,结合被测物体与传感器之间的距离关系,计算出位移的数值。
三、激光位移传感器三角法位移测量原理的优点和应用激光位移传感器的三角法位移测量原理具有多种优点和广泛的应用。
该原理具有高精度和快速响应的特点,能够实时准确地测量物体的位移。
该原理适用于不同材料和表面状态的物体,具有广泛的适用性。
激光位移传感器可以实现非接触测量,不会对被测物体造成损伤。
激光位移传感器广泛应用于各个领域,如自动化控制中的位置测量、机械制造中的位移检测等。
四、个人观点和理解从个人角度来看,激光位移传感器三角法位移测量原理是一种非常有价值的测量方法。
它通过光学原理和数学三角函数的运算,实现了高精度和快速响应的位移测量。
一种标定三角测量法激光位移计的方法
A Ca l ibra tion M ethod for La ser D isplacem en t System Ba sed on Tr iangula tion
Re n W e i m ing S un P e i m ao W a ng Ya le i Zhu Ha o
(D ep a rtm en t of P recision In strum en ts, T singhua U n iversity, B eijing 100084, P. R. Ch ina ) Abstract: In triangu la tion fo rm u la the rela tion betw een the dep enden t va riab le, indep enden t va ri2 ab le and system con struction p a ram eters is non linea r, and the va lues of these p a ram eters can no t be m ea su red accu ra tely. So it is d ifficu lt to ca lib ra te the la ser d isp lacem en t system. In th is p ap er tw o aux 2 ilia ry va riab les and tw o com po site p a ram eters a re set to linea rize the rela tion. A cco rd ing to th is linea r rela tion the accu ra te va lues of these tw o p a ram eters can be app rox i m a ted w ith L ea st Squa re M ethod, a s a con sequence the la ser d isp lacem en t system can be ca lib ra ted accu ra tely. In the app rox i m a tion p rocess the op tica l system aberra tion effect on the app rox i m a ting resu lts can be eli m ina ted p a rtia lly by co rrect2 ing the m ea su red va lue of indep enden t va riab le, and su rp lu s is reduced. T he exp eri m en t resu lts u sing th is ca lib ra tion m ethod a re described. Keywords: triangu la tion, la ser d isp lacem en t m ea su rem en t, da ta app rox i m a tion
基于PSD的激光三角测距法原理、系统和精度分析
基于PSD的激光三角测距法原理、系统和精度分析激光三角测距法原理、系统和精度分析1.三角测距方式三角测距是一种测量距离的方法,通过测量三角形的三个角度或三个边长来确定目标物体与测量仪之间的距离。
激光三角测距法就是利用激光束发射器向目标物体发射激光束,然后通过接收器接收反射回来的激光束,最后利用三角形计算目标物体与测量仪之间的距离。
2.激光三角法原理分析激光三角测距法是利用激光束在空间中直线传播的特性,通过测量激光束的发射方向和反射方向之间的角度差,来计算目标物体与测量仪之间的距离。
在实际应用中,通常采用相位测量法来测量激光束的相位差,进而计算出角度差,从而得到目标物体与测量仪之间的距离。
3.激光三角法距离计算激光三角测距法的距离计算涉及到角度测量和相位测量两个方面。
角度测量是通过测量激光束的发射方向和反射方向之间的角度差来实现的,而相位测量则是通过测量激光束的相位差来计算角度差。
最终,通过三角形计算公式,可以得到目标物体与测量仪之间的距离。
4.激光三角法精度分析激光三角测距法的精度受到多种因素的影响,包括系统探测能力、像点弥散斑等。
系统探测能力是指系统对光信号的接收能力,它受到PSD接收光功率、光能质心等因素的影响。
像点弥散斑是指激光束在目标物体表面反射时产生的光斑扩散现象,它会对系统的探测能力产生影响。
5.系统探测能力的影响因素5.1 PSD接收光功率对系统探测能力的影响PSD接收光功率是影响系统探测能力的重要因素之一,它受到激光束功率、反射率等因素的影响。
当PSD接收光功率较小时,系统的探测能力会受到限制,从而影响测量精度。
因此,在实际应用中,需要采用一定的技术手段来提高PSD接收光功率,以提高系统的探测能力。
5.2 光能质心对探测能力的影响光能质心是指激光束在PSD上的位置,它受到激光束发射方向、反射面形状等因素的影响。
当光能质心偏离PSD中心时,会导致系统的探测能力下降,从而影响测量精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电工程学院 2015年 12 月
摘要
本课程设计基于激光三角法原理对物体较小范围内的移动进行测量。在长度、距离及 三位形貌等的测试中有广泛应用。通过激光三角法两个方案直射式和斜射式的特点,结合 实验条件,选择最合适的方案进行测量。本次测量最大的特点就是非接触式测距,实际中 对非接触式测距一般很难知道物体到成像透镜的距离,可由成像透镜焦距以及激光光线和 物体散射光线组成的三角形的边长计算出该距离。通过定标,得出透镜上成像距离与物体像 移动距离间的对应关系,用此标尺作为计算移动位移的标准。移动物体采集光斑图像,用 m atlab 软件对图像处理进行处理,计算像的移动距离,再根据几何关系推导出物体的实际 移动距离。在最后计算出该方案的标准不确定度,并对方案产生的误差进行分析,提出改 进意见。设计方案光路简单,方便快捷,受环境影响小而且测量精确度较高。
5.1 各个距离测量值计算 ..............................................................................................8 5.2 定标计算 ..................................................................................................................9 5.3 光斑位移量计算 ..................................................................................................10 5.4 夹角和物体实际移动位移计算10ﻩ
激光三角法测量物体位移
———————————————————————————————— 作者: ———————————————————————————————— 日期:
《光电检测课程设计》
题 目名 称
学生姓名 专 业 学 号
指导教 师
激光三角法测位移 毛启盛
测控技术与仪器 120211319 王凌云
关键词:激光三角法;测距;定标;CCD;误差分析
目录
引 言 ........................................................................................................................ 1 1. 设计任务1ﻩ 2. 激光三角法测距基本原理..................................................................................1 3.方案论证和选择2ﻩ
6. 误差分析及方案评价.................................................................................... 11
6.1 相对误差和绝对误差计算 ....................................................................................11 6.2 误差分析 ..................................................................................................................12 6.3 设计方案评价 ........................................................................................................12
7. 课题分析评价 .................................................................................................. 13
8. 课设总结13ﻩ 参考文献14ﻩ 附录 1 实验器件清单.............................................................................................15 附录 2 实验光路图.................................................................................................16 附录 3 图像处理程序.........................................................................................17 附录4 光斑图像处理后灰度图18ﻩ 附录 5 物体移动光斑图19ﻩ
4. 方案验证步骤及数据记录6ﻩ
4.1 方案验证步骤6ﻩ 4.2 测量数ห้องสมุดไป่ตู้记录6ﻩ
4.2.1 测量获得成像透镜焦距 ............................................................................................ 6
4.2.2 定标7ﻩ
4.2.3 移动物体测量位移 .............................................................................................. 7
5. 测量数据处理 ................................................................................................... 8
3.1 激光三角法测距现状 ..........................................................................................2 3.2 测量方案 ..................................................................................................................2 3.3 方案比较与选择 ..................................................................................................4 3.4 器件选择6ﻩ